

Journal of Xidian University ›› 2024, Vol. 51 ›› Issue (2): 137-156.doi: 10.19665/j.issn1001-2400.20230602
• Computer Science and Technology & Cyberspace Security • Previous Articles Next Articles
XIAO Yixin( ), LIU Sanyang()
), LIU Sanyang()
Received:2023-03-08
Online:2024-04-20
Published:2023-09-18
CLC Number:
XIAO Yixin, LIU Sanyang. Integration of pattern search into the grasshopper optimization algorithm and its applications[J].Journal of Xidian University, 2024, 51(2): 137-156.
"
"

"
"
"
"
"
"
| 函数公式 | 搜索空间 |
|---|---|
| f1(x)= | [-100,100] |
| f3(x)= | [-100,100] |
| f5(x)= | [-30,30] |
| f7(x)= | [-1.28,1.28] |
| f8(x)=- | [-100,100] |
| f10(x)=-20exp | [-32,32] |
| f12(x)= yi=1+ u(xi,b,n,m)= | [-50,50] |
| f13=0.1 | [-50,50] |
"
| 编号 | 函数名 | 特征 | 定义域 | 最优值 |
|---|---|---|---|---|
| C01 | Shifted and Rotated Bent Cigar Function | MS | [-100,100] | 100 |
| C03 | Shifted and Rotated Rosenbrock’s Function | MN | [-100,100] | 300 |
| C05 | Shifted and Rotated Expanded Scaffer’s F6 Function | MN | [-100,100] | 500 |
| C10 | Hybrid Function 1(N=3) | HF | [-100,100] | 1 000 |
| C15 | Hybrid Function 6(N=4) | HF | [-100,100] | 1 500 |
| C19 | Hybrid Function 6(N=6) | HF | [-100,100] | 1 900 |
| C20 | Composition Function 1(N=3) | CF | [-100,100] | 2 000 |
| C25 | Composition Function 6(N=5) | CF | [-100,100] | 2 500 |
"
| 算法 | 参数设置 |
|---|---|
| GOA | cmax=1,cmin=0.000 04 |
| PSGOA | cmax=1,cmin=0.000 04,T=2D |
| OBLGOA | cmax=1,cmin=0.000 04 |
| HCUGOA | cmax=1,cmin=0.000 04,θ=0.05 |
| MGOA | cmax=1,cmin=0.000 04,r2∈[0,1],R∈[0,1] |
| SHADE | βmax=0.8,βmin=0.2,F=0.5,CR=0.9 |
| AVOA | P1=0.6,P2=0.4,P3=0.6,w=2.5,L1=0.8,L2=0.2 |
| WOA | b=3,c1=2.0,c2=2.0,rand∈[0,1] |

"

"
"
"
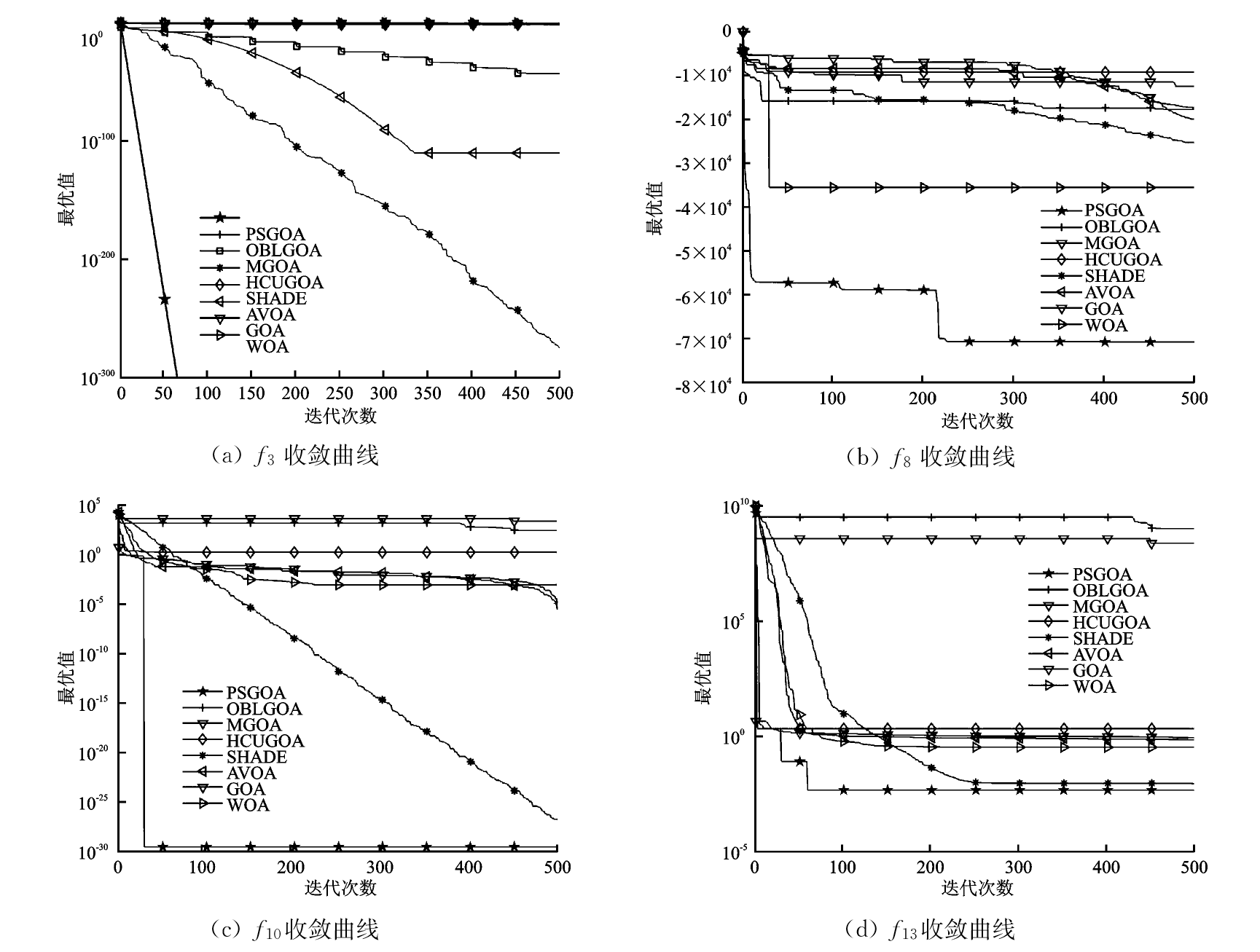
| 函数 | 准则 | PSGOA | OBLGOA | HCUGOA | MGOA | GOA | SHADE | AVOA | WOA |
|---|---|---|---|---|---|---|---|---|---|
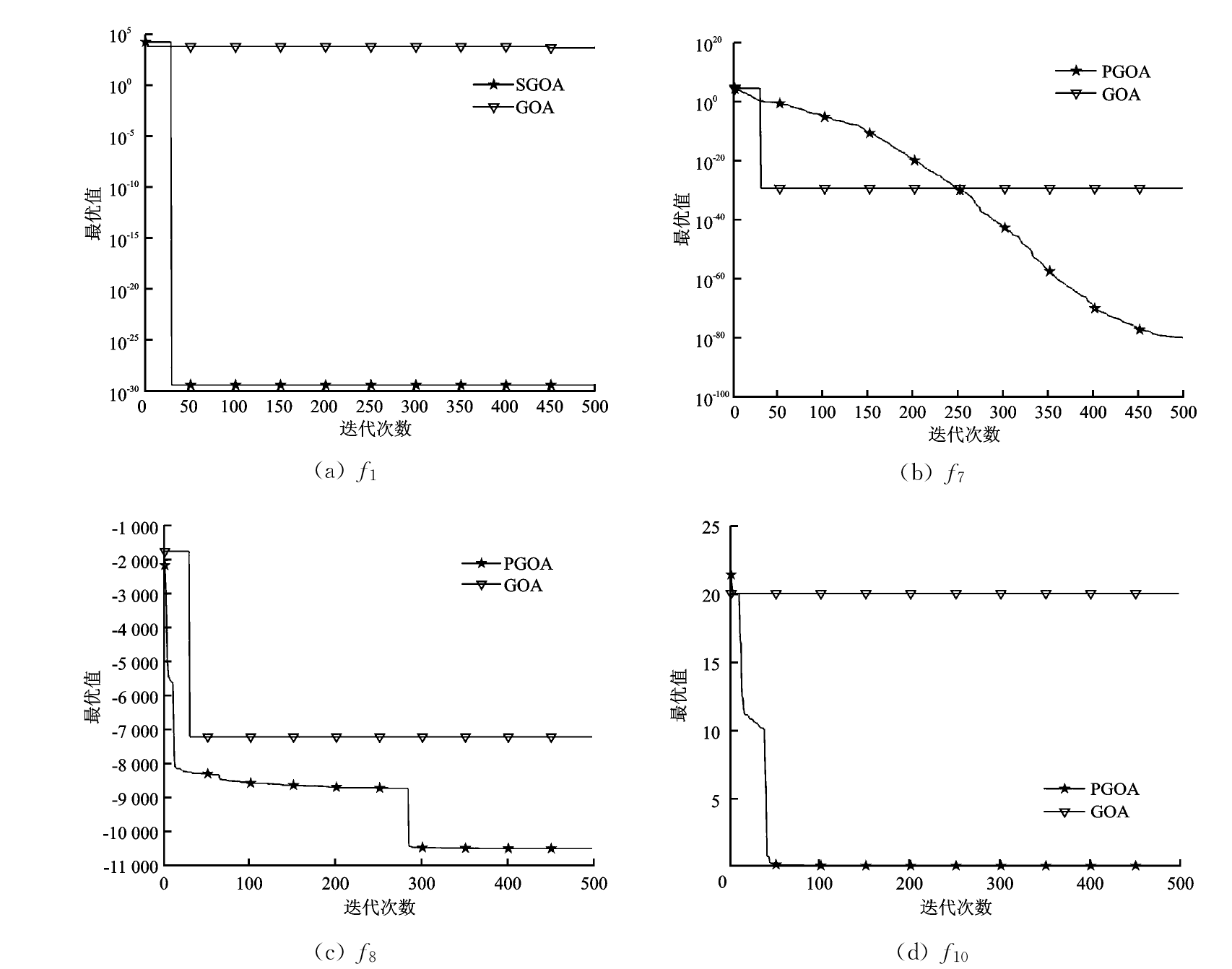
| f1 | 最小值 | 0.00E+00 | 1.15E+04 | 0.00E+00 | 4.40E-71 | 5.46E+03 | 5.67E-12 | 2.09E-155 | 3.56E-86 |
| 平均值 | 0.00E+00 | 6.47E+03 | 0.00E+00 | 5.54E-68 | 1.35E+05 | 6.41E-10 | 5.86E-101 | 2.76E-74 | |
| 标准差 | 0.00E+00 | 5.63E+03 | 0.00E+00 | 1.98E-67 | 6.06E+03 | 1.64E-09 | 3.21E-100 | 9.49E-74 | |
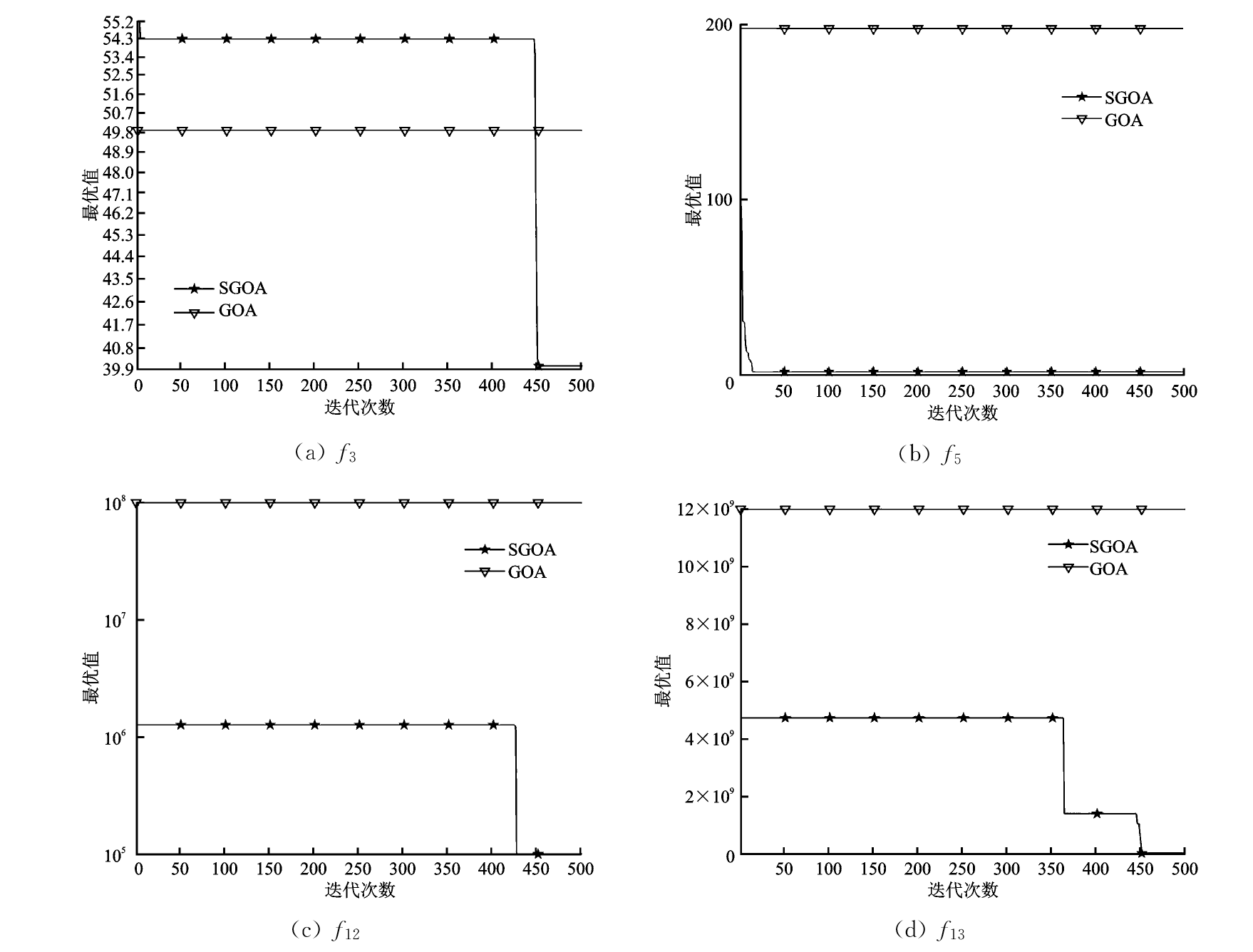
| f3 | 最小值 | 0.00E+00 | 5.30E+03 | 0.00E+00 | 6.04E-52 | 9.26E+03 | 1.13E+00 | 3.95E-155 | 5.12E+03 |
| 平均值 | 0.00E+00 | 2.83E+04 | 4.42E-251 | 4.81E-49 | 4.08E+04 | 1.47E+01 | 8.89E-103 | 4.31E+04 | |
| 标准差 | 0.00E+00 | 2.65E+04 | 0.00E+00 | 9.22E-49 | 2.55E+04 | 1.62E+01 | 4.86E-102 | 1.65E+04 | |
| f5 | 最小值 | 0.00E+00 | 1.60E+03 | 2.89E+02 | 2.61E+02 | 3.14E+06 | 1.58E+01 | 2.04E-06 | 2.70E+01 |
| 平均值 | 4.06E-26 | 4.18E+06 | 2.89E+02 | 2.87E+02 | 9.95E+06 | 2.87E+01 | 3.06E-02 | 2.78E+01 | |
| 标准差 | 5.92E-26 | 1.63E+07 | 1.96E-02 | 7.62E-01 | 8.92E+06 | 1.63E+01 | 4.56E-03 | 4.16E-01 | |
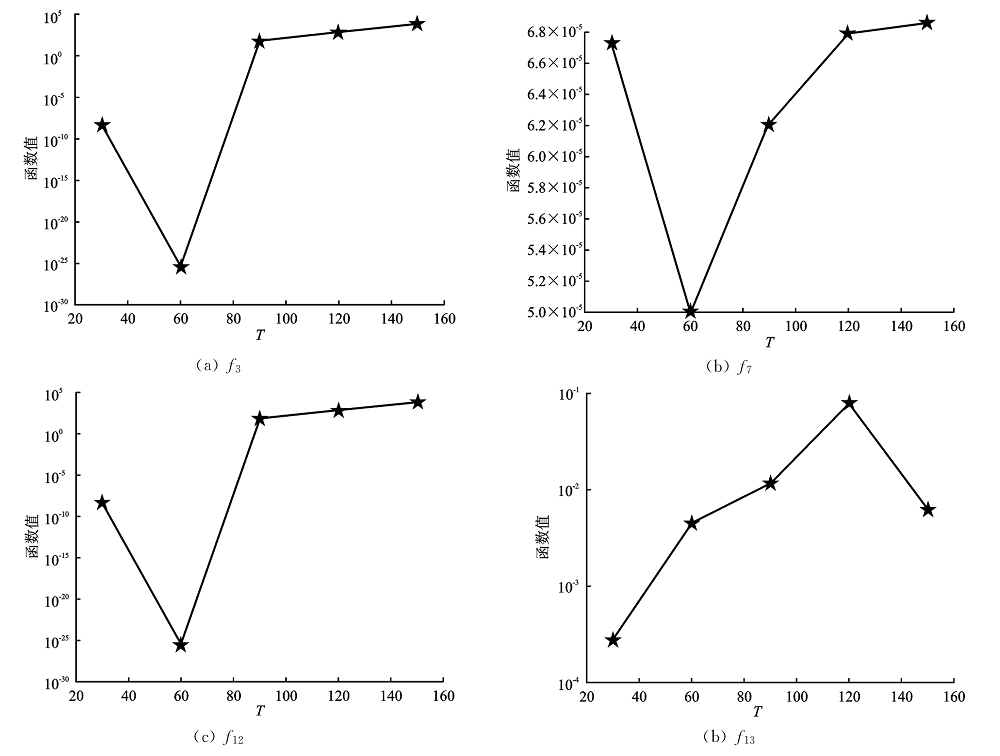
| f7 | 最小值 | 2.01E-06 | 3.35E-03 | 7.21E-06 | 8.20E-05 | 1.97E-01 | 7.93E-03 | 1.77E-05 | 8.85E-05 |
| 平均值 | 8.68E-05 | 2.10E-02 | 3.69E-04 | 9.18E-04 | 6.10E-01 | 1.96E-02 | 1.17E-03 | 2.05E-03 | |
| 标准差 | 8.78E-05 | 2.00E-02 | 4.15E-04 | 6.78E-04 | 2.70E-01 | 1.96E-02 | 1.20E-03 | 2.12E-03 | |
| f8 | 最小值 | -12569.50 | -8090.76 | -7879.24 | -6235.05 | -5428.64 | -12181.42 | -12563.88 | -12566.9 |
| 平均值 | -12569.43 | -6371.55 | -4276.76 | -5305.94 | -4252.32 | -11714.13 | -7867.69 | -10598.4 | |
| 标准差 | 8.40E-12 | 1038.26 | 1486.67 | 642.93 | 705.63 | 283.98 | 4033.55 | 1671.1 | |
| f10 | 最小值 | 0.00E+00 | 4.90E+02 | 2.34E-18 | 1.37E-18 | 2.03E+01 | 1.39E+03 | 9,87E-18 | 3.25E-16 |
| 平均值 | 0.00E+00 | 1.43E+03 | 4.35E-15 | 1.77E-20 | 2.53E+01 | 1.55E+03 | 1.51E-14 | 5.75E-14 | |
| 标准差 | 0.00E+00 | 3.75E+02 | 7.63E-20 | 6.75E-19 | 9.35E-04 | 6.72E+01 | 4.32E-20 | 3.45E-15 | |
| f12 | 最小值 | 1.57E-27 | 1.20E+01 | 5.09E+01 | 4.36E-02 | 9.73E+07 | 2.77E-09 | 5.46E-09 | 4.84E-03 |
| 平均值 | 3.11E-30 | 4.07E+07 | 9.08E-01 | 8.23E-02 | 5.77E+08 | 5.22E-02 | 1.00E-25 | 2.65E-02 | |
| 标准差 | 2.84E-30 | 7.70E+07 | 2.69E-01 | 3.85E-02 | 7.70E+07 | 7.37E-02 | 1.41E-06 | 9.26E-03 | |
| f13 | 最小值 | 8.41E-31 | 2.31E+06 | 2.99E+00 | 6.35E-01 | 4.44E+08 | 1.35E-09 | 2.87E-07 | 4.16E-01 |
| 平均值 | 3.19E-30 | 1.62E+08 | 2.99E+00 | 9.12E-01 | 1.29E+09 | 3.29E-03 | 1.76E-04 | 9.09E-01 | |
| 标准差 | 2.77E-30 | 2.08E+08 | 1.66E-03 | 1.77E-01 | 1.08E+09 | 5.30E-03 | 2.67E-04 | 4.98E-01 |
"
| 函数 | 准则 | PSGOA | OBLGOA | HCUGOA | MGOA | GOA | SHADE | AVOA | WOA |
|---|---|---|---|---|---|---|---|---|---|
| f1 | 最小值 | 00.00E+00 | 1.90E+04 | 0.00E+00 | 5.34E-49 | 4.25E+04 | 9.88E+02 | 7.02E-162 | 7.72E-84 |
| 平均值 | 00.00E+00 | 4.24E+04 | 4.36E-247 | 2.89E-48 | 8.47E+04 | 1.76E+03 | 8.77E-105 | 5.35E-71 | |
| 标准差 | 00.00E+00 | 2.10E+04 | 0.00E+00 | 1.79E-48 | 2.39E+04 | 5.08E+02 | 4.78E-104 | 1.68E-70 | |
| f3 | 最小值 | 00.00E+00 | 3.62E+04 | 0.00E+00 | 4.16E-39 | 3.27E+05 | 9.46E+04 | 1.83E-155 | 1.83E-155 |
| 平均值 | 00.00E+00 | 5.91E+05 | 2.79E-258 | 3.76E-38 | 1.31E+06 | 1.17E+05 | 9.18E-125 | 9.18E-125 | |
| 标准差 | 00.00E+00 | 5.91E+05 | 0.00E+00 | 4.46E-48 | 6.79E+05 | 1.87E+04 | 2.90E-124 | 2.90E-124 | |
| f5 | 最小值 | 01.35E-26 | 2.90E+04 | 9.89E+01 | 9.78E+01 | 1.19E+07 | 5.92E+02 | 1.98E-05 | 9.75E+01 |
| 平均值 | 03.18E-02 | 4.69E+06 | 9.89E+01 | 9.81E+01 | 5.51E+07 | 1.12E+03 | 1.00E+01 | 9.81E+01 | |
| 标准差 | 09.19E-04 | 5.04E+06 | 1.40E-02 | 3.32E-01 | 3.01E+07 | 4.27E+02 | 1.62E+01 | 3.42E-01 | |
| f7 | 最小值 | 06.80E-06 | 7.83E-03 | 8.79E-05 | 1.05E-04 | 1.23E+01 | 3.37E+00 | 1.18E-04 | 1.92E-04 |
| 平均值 | 08.59E-05 | 1.14E-01 | 3.50E-04 | 3.82E-03 | 2.70E+01 | 4.28E+00 | 7.90E-04 | 1.88E-03 | |
| 标准差 | 06.19E-05 | 9.76E-02 | 4.23E-04 | 3.68E-03 | 1.72E+01 | 8.20E-01 | 5.07E-04 | 1.36E-03 | |
| f8 | 最小值 | 0-83796.5 | -22280.1 | -16524.0 | -30440.5 | -15773.8 | -29759.2 | -24254.0 | -83791.3 |
| 平均值 | 0-83796.5 | -16306.3 | -12069.9 | -24821.4 | -11574.7 | -25591.5 | -17079.6 | -66959.2 | |
| 标准差 | 05.18E-10 | 3.26E+02 | 2.00E+02 | 3.97E+03 | 2.50E+03 | 2255.9 | 3962.6 | 10289.6 | |
| f10 | 最小值 | 08.88E-16 | 0.00E+00 | 7.63E-20 | 4.35E-15 | 2.30E+01 | 1.56E+01 | 8.17E-14 | 8.18E-16 |
| 平均值 | 08.88E-16 | 8.16E-16 | 8.88E-16 | 7.89E-15 | 4.56E+01 | 2.05E+01 | 7.56E-14 | 4.79E-15 | |
| 标准差 | 00.00E+00 | 4.17E-16 | 7.89E-16 | 4.16E-19 | 1.38E+05 | 5.59E-01 | 6.17E-19 | 2.62E-15 | |
| f12 | 最小值 | 02.35E-33 | 5.65E+05 | 1.02E+00 | 4.52E-02 | 5.57E+08 | 4.81E+04 | 3.90E-08 | 4.55E-02 |
| 平均值 | 08.80E-32 | 2.53E+07 | 1.16E+00 | 5.16E-01 | 2.83E+09 | 4.41E+05 | 1.19E-06 | 9.99E-02 | |
| 标准差 | 05.36E-32 | 3.68E+08 | 5.53E-02 | 3.42E-02 | 2.34E+09 | 4.41E+05 | 1.66E-06 | 4.50E-02 | |
| f13 | 最小值 | 1.09E-20 | 1.80E+07 | 1.99E+01 | 1.90E-01 | 1.31E+09 | 1.34E-32 | 6.05E-05 | 1.60E+00 |
| 平均值 | 3.91E-22 | 4.39E+09 | 1.99E+01 | 1.94E-01 | 4.37E+09 | 8.95E-30 | 2.18E-04 | 8.47E+00 | |
| 标准差 | 2.83E-25 | 9.40E+09 | 2.03E-02 | 1.86E-01 | 9.40E+07 | 4.15E-30 | 1.98E-04 | 2.89E+00 |
"
"
"
| 维度 | P-value | PSGOA | OBLGOA | HCUGOA | MGOA | GOA | SHADE | AVOA | WOA |
|---|---|---|---|---|---|---|---|---|---|
| 30 | 3.16E-11 | 1.23 | 6.69 | 3.76 | 4.15 | 7.69 | 4.84 | 3.00 | 4.61 |
| 200 | 2.42E-12 | 1.30 | 6.46 | 3.61 | 3.84 | 7.76 | 5.84 | 2.73 | 4.42 |
"
| 函数 | OBLGOA | HCUGOA | MGOA | GOA | SHADE | AVOA | WOA |
|---|---|---|---|---|---|---|---|
| f1 | 1.21E-12 | 1.45E-04 | 1.21E-12 | 1.21E-12 | 1.21E-12 | 1.21E-12 | 1.21E-12 |
| f3 | 8.00E-12 | 2.08E-10 | 8.00E-12 | 8.00E-12 | 8.00E-12 | 8.00E-12 | 8.00E-12 |
| f5 | 3.01E-11 | 3.01E-11 | 3.01E-11 | 3.01E-11 | 3.01E-11 | 2.70E-03 | 3.01E-11 |
| f7 | 1.82E-10 | 7.68E-12 | 6.23E-04 | 1.82E-11 | 1.82E-11 | 1.31E-09 | 2.20E-10 |
| f8 | 2.52E-11 | 2.52E-11 | 2.52E-11 | 2.52E-11 | 2.52E-11 | 2.52E-11 | 2.52E-11 |
| f10 | 2.62E-13 | 1.17E-12 | 3.23E-13 | 3.13E-08 | |||
| f12 | 3.01E-11 | 3.01E-11 | 3.01E-11 | 3.01E-11 | 3.01E-11 | 3.01E-11 | 3.01E-11 |
| f13 | 3.00E-11 | 3.00E-11 | 3.00E-11 | 3.00E-11 | 3.51E-07 | 9.49E-06 | 3.00E-11 |
"
| 函数 | OBLGOA | HCUGOA | MGOA | GOA | SHADE | AVOA | WOA |
|---|---|---|---|---|---|---|---|
| f1 | 1.21E-12 | 1.37E-05 | 1.21E-12 | 1.21E-12 | 1.21E-12 | 1.21E-12 | 1.21E-12 |
| f3 | 6.38E-10 | 1.49E-05 | 6.38E-10 | 6.38E-10 | 6.38E-10 | 6.38E-10 | 6.38E-10 |
| f5 | 1.82E-10 | 1.82E-10 | 1.82E-10 | 1.82E-10 | 1.82E-10 | 4.72E-06 | 1.82E-10 |
| f7 | 1.82E-09 | 3.84E-04 | 1.82E-09 | 1.82E-09 | 1.82E-09 | 1.72E-05 | 3.61E-09 |
| f8 | 1.82E-10 | 1.82E-10 | 1.82E-10 | 1.82E-10 | 1.82E-10 | 1.82E-10 | 1.82E-10 |
| f10 | 8.31E-13 | 1.09E-12 | 5.35E-13 | 9.15E-09 | |||
| f12 | 2.99E-11 | 2.99E-11 | 2.99E-11 | 2.99E-11 | 2.99E-11 | 2.99E-11 | 2.99E-11 |
| f13 | 3.01E-11 | 3.01E-11 | 3.01E-11 | 3.01E-11 | 3.01E-11 | 3.89E-05 | 3.01E-11 |
"
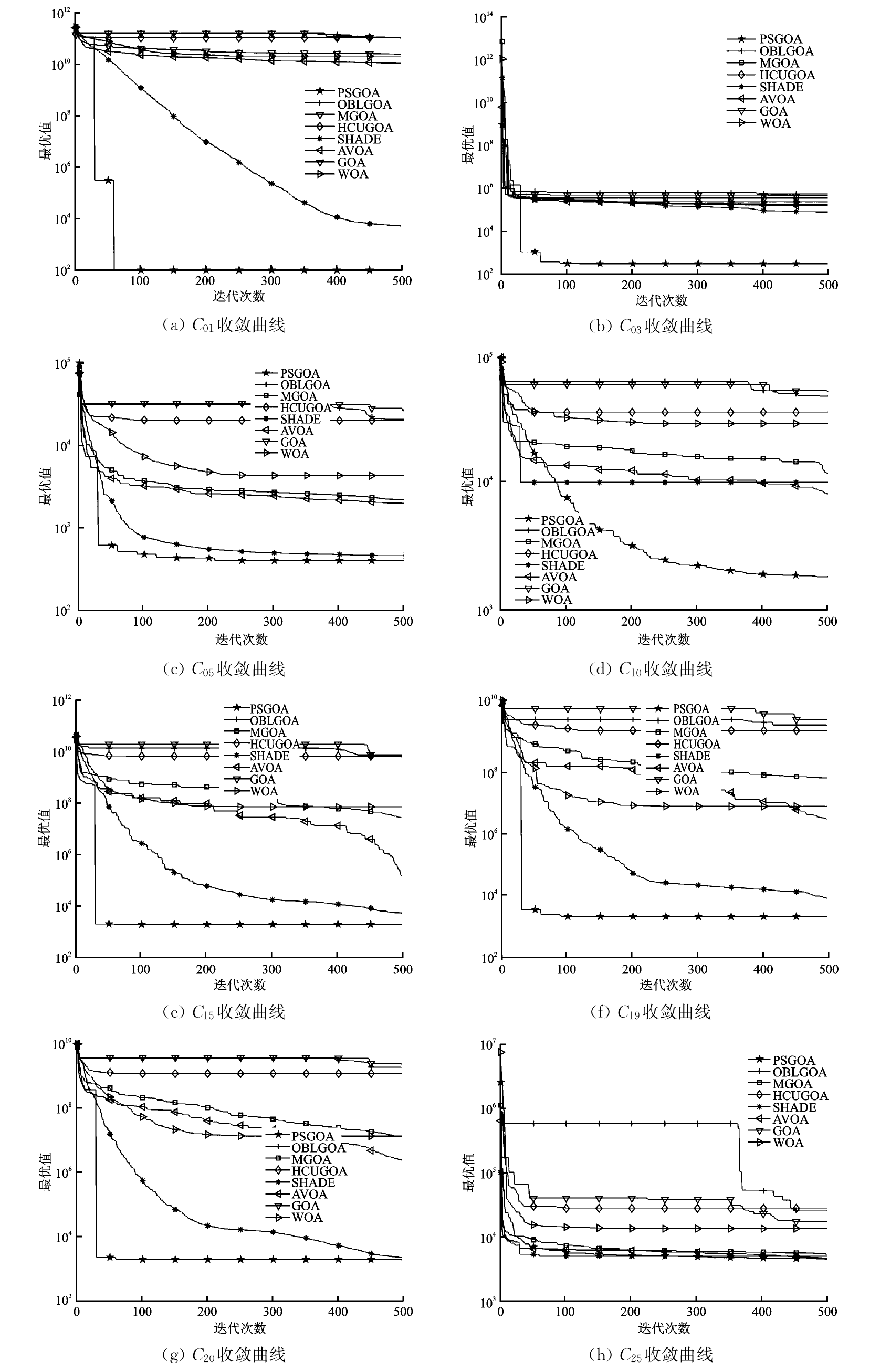
| 函数 | 准则 | PSGOA | OBLGOA | HCUGOA | MGOA | GOA | SHADE | AVOA | WOA |
|---|---|---|---|---|---|---|---|---|---|
| C01 | 最小值 | 1.00E+02 | 7.19E+10 | 9.35E+10 | 1.63E+10 | 1.01E+11 | 7.96E+02 | 1.09E+09 | 1.70E+10 |
| 平均值 | 1.00E+02 | 1.04E+11 | 1.06E+11 | 2.33E+10 | 1.32E+11 | 7.13E+03 | 1.96E+10 | 2.13E+10 | |
| 方差 | 1.25E-09 | 1.47E+10 | 6.33E+09 | 6.16E+10 | 1.75E+10 | 5.75E+03 | 4.18E+09 | 3.24E+09 | |
| C03 | 最小值 | 3.00E+02 | 2.56E+05 | 1.67E+05 | 1.29E+05 | 3.79E+05 | 3.48E+04 | 2.21E+05 | 2.61E+05 |
| 平均值 | 3.00E+02 | 4.78E+05 | 3.45E+05 | 1.69E+05 | 6.33E+05 | 5.69E+04 | 3.34E+05 | 3.62E+05 | |
| 方差 | 1.63E-11 | 1.63E+05 | 1.27E+05 | 2.39E+04 | 2.18E+05 | 1.55E+04 | 1.23E+05 | 6.83E+04 | |
| C05 | 最小值 | 7.68E+02 | 1.13E+03 | 1.07E+03 | 7.64E+02 | 1.21E+03 | 7.05E+02 | 9.00E+02 | 9.35E+02 |
| 平均值 | 8.09E+02 | 1.21E+03 | 1.19E+03 | 8.59E+02 | 1.31E+03 | 7.37E+02 | 9.42E+02 | 1.07E+03 | |
| 方差 | 3.62E+01 | 6.71E+01 | 5.32E+01 | 5.71E+01 | 5.45E+01 | 2.35E+01 | 2.75E+01 | 7.17E+01 | |
| C10 | 最小值 | 8.46E+03 | 1.43E+04 | 1.54E+04 | 1.33E+04 | 1.52E+04 | 9.44E+03 | 8.44E+03 | 1.18E+04 |
| 平均值 | 9.27E+03 | 1.53E+04 | 1.58E+04 | 1.41E+04 | 1.59E+04 | 9.63E+03 | 1.00E+04 | 1.31E+04 | |
| 方差 | 8.49E+02 | 6.89E+02 | 3.65E+02 | 6.71E+02 | 7.19E+02 | 1.51E+02 | 1.07E+03 | 1.22E+03 | |
| C15 | 最小值 | 1.69E+03 | 1.82E+09 | 2.27E+09 | 6.13E+05 | 4.20E+09 | 2.72E+03 | 1.13E+06 | 3.62E+06 |
| 平均值 | 1.88E+03 | 7.13E+09 | 6.84E+09 | 3.46E+07 | 9.06E+09 | 5.13E+03 | 8.16E+06 | 4.39E+07 | |
| 方差 | 1.11E+02 | 4.23E+09 | 4.28E+09 | 2.77E+07 | 4.41E+09 | 3.62E+03 | 1.00E+07 | 3.54E+07 | |
| C19 | 最小值 | 1.98E+03 | 5.79E+08 | 6.78E+08 | 5.99E+05 | 1.15E+09 | 2.18E+03 | 1.00E+06 | 3.89E+06 |
| 平均值 | 2.07E+03 | 2.00E+09 | 1.57E+09 | 2.28E+07 | 2.98E+09 | 3.60E+03 | 9.55E+06 | 1.43E+07 | |
| 方差 | 4.17E+01 | 1.10E+09 | 6.11E+08 | 3.18E+07 | 1.23E+09 | 2.10E+03 | 1.04E+07 | 1.27E+07 | |
| C20 | 最小值 | 2.65E+03 | 3.99E+03 | 3.60E+03 | 2.69E+03 | 4.49E+03 | 3.07E+03 | 2.96E+03 | 3.34E+03 |
| 平均值 | 3.13E+03 | 4.74E+03 | 4.28E+03 | 3.37E+03 | 4.99E+03 | 3.42E+03 | 3.41E+03 | 3.94E+03 | |
| 方差 | 3.54E+02 | 4.98E+02 | 4.53E+02 | 4.74E+02 | 1.96E+02 | 1.84E+02 | 2.52E+02 | 3.07E+02 | |
| C25 | 最小值 | 2.86E+03 | 1.26E+04 | 1.21E+04 | 4.02E+03 | 1.58E+04 | 3.02E+03 | 4.30E+03 | 4.88E+03 |
| 平均值 | 2.98E+03 | 1.74E+04 | 1.43E+04 | 4.92E+03 | 1.96E+04 | 3.05E+03 | 4.75E+03 | 5.48E+03 | |
| 方差 | 4.52E+01 | 4.27E+03 | 1.23E+03 | 7.58E+02 | 3.44E+03 | 2.05E+01 | 4.01E+02 | 6.21E+02 | |
| 弗里德曼值 | 1.307 7 | 6.538 5 | 4.192 3 | 3.961 5 | 7.692 3 | 2.923 1 | 4.461 5 | 4.923 1 |

"
"
| 函数 | OBLGOA | HCUGOA | MGOA | GOA | SHADE | AVOA | WOA |
|---|---|---|---|---|---|---|---|
| C01 | 3.01E-11 | 3.01E-11 | 3.01E-11 | 3.01E-11 | 3.01E-11 | 3.01E-11 | 3.01E-11 |
| C03 | 3.01E-11 | 3.01E-11 | 3.01E-11 | 3.01E-11 | 3.01E-11 | 3.01E-11 | 3.01E-11 |
| C05 | 6.79E-09 | 6.79E-09 | 6.01E-07 | 6.79E-09 | 1.43E-08 | 1.43E-08 | 6.79E-09 |
| C10 | 6.79E-10 | 1.89E-07 | 1.89E-05 | 6.79E-10 | 1.26E-01 | 3.74E-04 | 1.65E-07 |
| C15 | 3.01E-11 | 3.01E-11 | 3.01E-11 | 3.01E-11 | 3.01E-11 | 3.01E-11 | 3.01E-11 |
| C19 | 3.01E-11 | 3.01E-11 | 3.01E-11 | 3.01E-11 | 2.60E-08 | 3.01E-11 | 3.01E-11 |
| C20 | 1.77E-10 | 6.06E-11 | 5.18E-07 | 3.01E-11 | 1.17E-05 | 5.56E-05 | 1.20E-08 |
| C25 | 3.01E-11 | 3.01E-11 | 3.01E-11 | 3.01E-11 | 3.01E-11 | 3.01E-11 | 3.01E-11 |

"

"

"

"
"
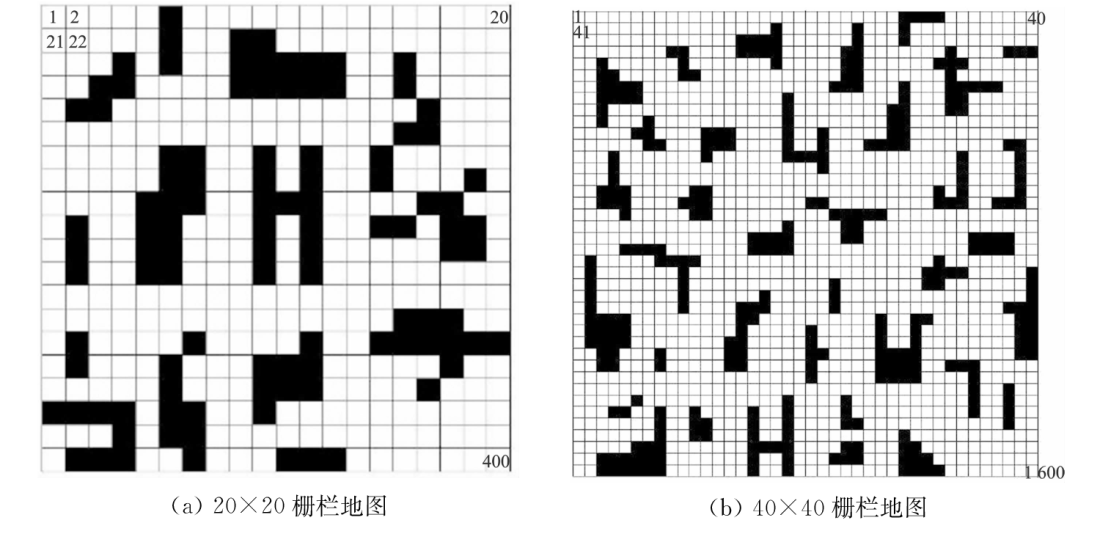
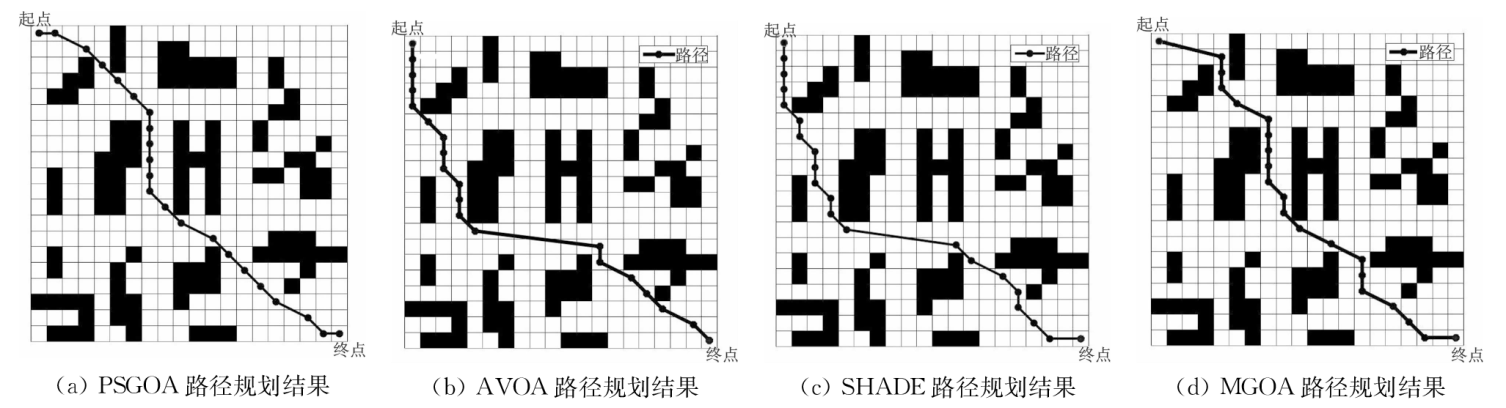
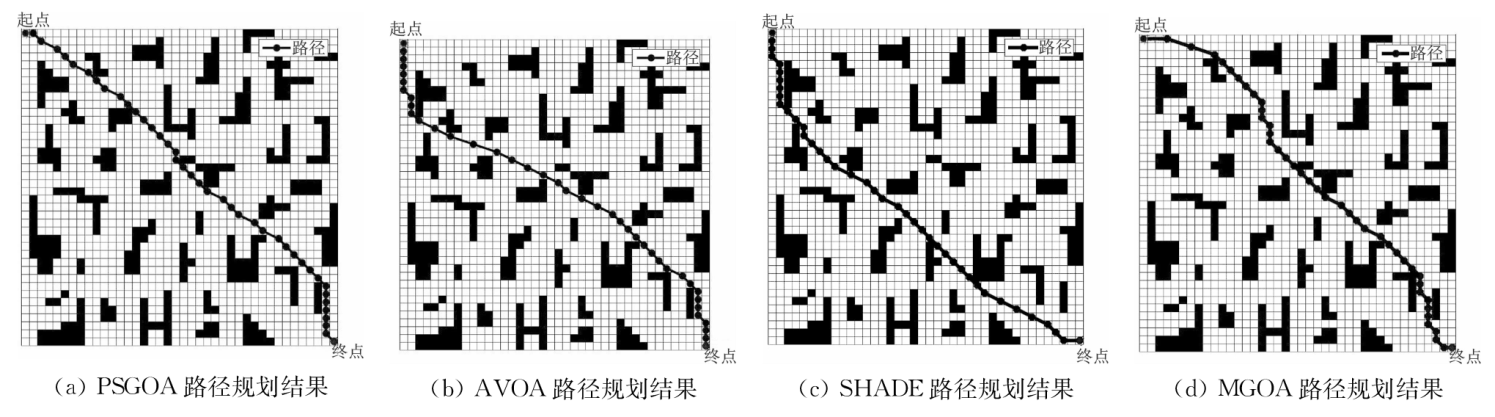
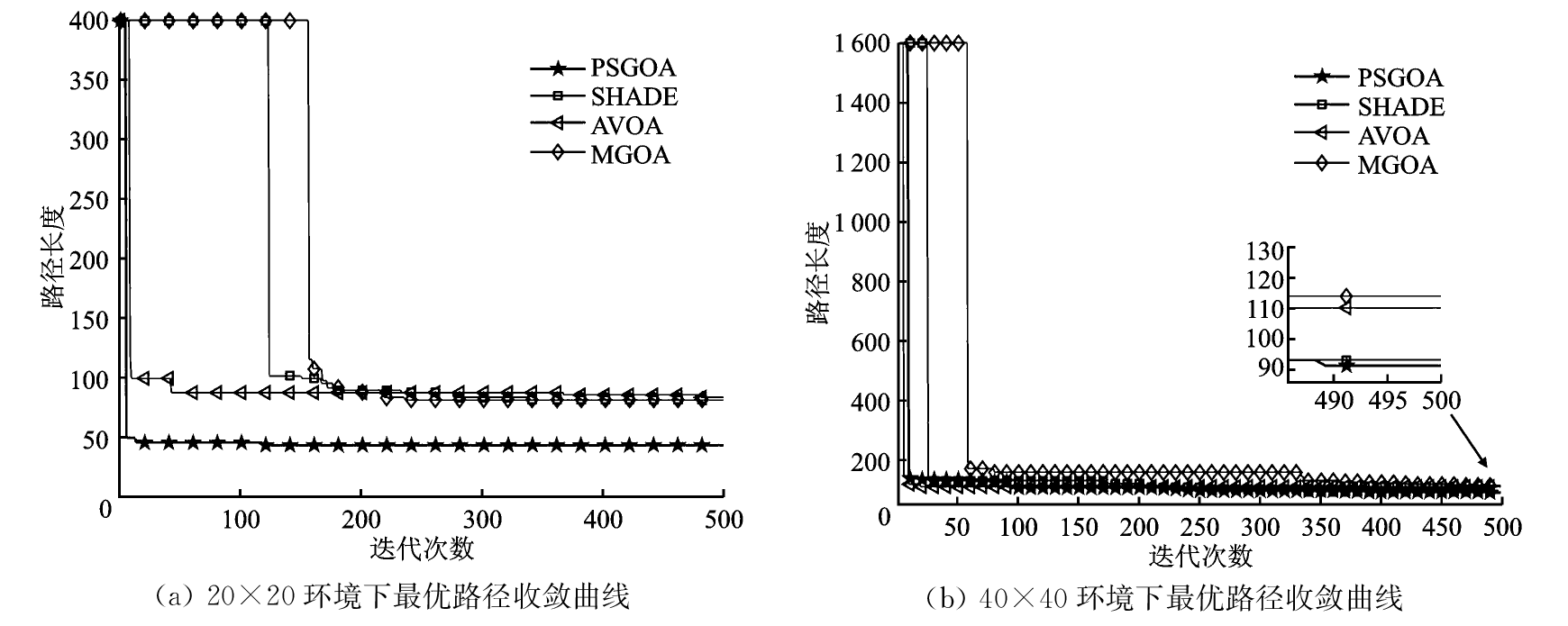
| 地图 | 性能指标 | PSGOA | MGOA | SHADE | AVOA |
|---|---|---|---|---|---|
| 20×20 | 最小值 | 48.735 | 79.473 | 86.375 | 98.923 |
| 平均值 | 50.893 | 82.890 | 90.946 | 100.563 | |
| 标准差 | 0.934 | 5.568 | 5.696 | 4.863 | |
| 成功率/% | 95 | 90 | 93 | 89 | |
| 时间/s | 4.02 | 4.21 | 4.89 | 3.56 | |
| 40×40 | 最小值 | 88.32 | 113.54 | 94.63 | 110.78 |
| 平均值 | 90.54 | 117.45 | 98.36 | 112.39 | |
| 标准差 | 0.78 | 8.11 | 1.05 | 5.87 | |
| 成功率/% | 93 | 88 | 90 | 85 | |
| 时间/s | 7.78 | 9.43 | 8.89 | 7.83 |
| [1] | KENNEDY J, EBERHART R. Particle Swarm Optimization[C]//Icnn95-International Conference on Neural Networks. Piscataway:IEEE, 1995:1942-1948. |
| [2] | CHEN A. How to Prove the Optimized Values of Hyperparameters for Particle Swarm Optimization(2023)[J/OL].[2023-02-01]. https://arxiv.org/abs/2302.00155. |
| [3] | 闫群民, 马瑞卿, 马永翔, 等. 一种自适应模拟退火粒子群优化算法[J]. 西安电子科技大学学报, 2021, 48(4):120-127. |
| YAN Qunmin, MA Ruiqing, MA Yongxiang, et al. Adaptive Simulated Annealing Particle Swarm Optimization Algorithm[J]. Journal of Xidian University, 2021, 48(4):120-127. | |
| [4] | MA L, ZHU Y, ZHANG D, et al. A Hybrid Approach to Artificial Bee Colony Algorithm[J]. Neural Computing and Applications, 2016,27:387-409. |
| [5] | YE M, CAI Y, QIU H, et al. A Hybrid Artificial Bee Colony Algorithm to Solve a New Minimum Exposure Path Problem with Various Boundary Conditions for Wireless Sensor Networks[J]. International Journal of Pattern Recognition and Artificial Intelligence, 2022, 36(2):2159056. |
| [6] | HORING M H, LIOU R J. Multilevel Minimum Cross Entropy Threshold Selection Based on the Firefly Algorithm[J]. Expert Systems with Applications, 2011, 38(12):14805-14811. |
| [7] | El-SHORBAGY M A. El-REFAEY A M. A Hybrid Genetic-Firefly Algorithm for Engineering Design Problems[J]. Journal of Computational Design and Engineering, 2022, 9(2):706-730. |
| [8] | MIRJALILI S, LEWIS A. The Whale Optimization Algorithm[J]. Advances in Engineering Software, 2016,95:51-67. |
| [9] | LI M, YU X, FU B, et al. AModified Whale Optimization Algorithm with Multi-Strategy Mechanism for Global Optimization Problems(2023)[J/OL].[2023-12-01].https://doi.org/10.1007/s00521-023-08287-5. |
| [10] | TUBISHAT M, IDRIS N, SHUIB L, et al. Improved Salp Swarm Algorithm Based on Opposition Based Learning and Novel Local Search Algorithm for Feature Selection[J]. Expert Systems with Applications, 2020,145:113122. |
| [11] | IKRAMR M A, DAI H L, EWEES A A, et al. Application of Improved Version of Multi Verse Optimizer Algorithm for Modeling Solar Radiation[J]. Energy Reports, 2022,8:12063-12080. |
| [12] | MAULIK U, BANDYOPADHYAY S. Genetic Algorithm-Based Clustering Technique[J]. Pattern Recognition, 2000, 33(9):1455-1465. |
| [13] | WOLPERT D H. The Lack of a Priori Distinctions Between Learning Algorithms[J]. Neural Computation, 1996, 8(7):1341-1390. |
| [14] | SAREMI S, MIRJALILI S, LEWIS A. Grasshopper Optimization Algorithm:Theory and Application[J]. Advances in Engineering Software, 2017,105:30-47. |
| [15] | VEZA I, KARAOGLAN A D, ILERI E, et al. Grasshopper Optimization Algorithm for Diesel Engine Fuelled with Ethanol-Biodiesel Diesel Blends[J]. Case Studies in Thermal Engineering, 2022.31:101817. |
| [16] | RAHMANU A E, KATOULI M. Diagnosing Lung Cancer Using Grasshopper Optimization Algorithm and K-Nearest Neighbor Classification[J]. Review of Computer Engineering Studies, 2019, 6(4):69-75. |
| [17] | HOSSEINY S, RAHMANI A, DERAKHSHAN M. Improve Intrusion Detection Using Grasshopper Optimization Algorithm and Decision Trees[J]. International Journal of Safety and Security Engineering, 2020, 10(3):359-364. |
| [18] | DWIWEDI S. Detecting Anonymous Attacks in Wireless Communication Medium Using Adaptive Grasshopper Optimization Algorithm[J]. Cognitive Systems Research, 2021,69:1-21. |
| [19] | 何庆, 林杰, 徐航. 混合柯西变异和均匀分布的蝗虫优化算法[J]. 控制与决策, 2021, 36(7):1558-1568. |
| HE Qing, LIN Jie, XU Hang. Hybrid Cauchy Mutation and Uniform Distribution of Grasshopper Optimization Algorithm[J]. Control and Decision, 2021, 36(7):1558-1568. | |
| [20] | EWEES A A, ELAZIZ M A, HOUSSEIN E H. Improved Grasshopper Optimization Algorithm Using Opposition-Based Learning[J]. Expert Systems with Applications, 2018,112:156-172. |
| [21] | FANG L, LIANG X. A Novel Method Based on Nonlinear Binary Grasshopper Whale Optimization Algorithm for Feature Selection[J]. Journal of Bionic Engineering, 2023,20:237-252. |
| [22] | WU L, WU J, WANG T. Enhancing Grasshopper Optimization Algorithm(GOA) with Levy Flight for Engineering Applications[J]. Scientific Reports, 2023, 13(124):1-49. |
| [23] | DENG L, LIU S. A Novel Hybrid Grasshopper Optimization Algorithm for Numerical and Engineering Optimization Problems[J]. Neural Processing Letters, 2023,55:9851-9905. |
| [24] | HVATTUM L M, GLOVER F. Finding Local Optima of High-Dimensional Functions Using Direct Search Methods[J]. European Journal of Operational Research, 2009, 195(1):31-45. |
| [25] | KANG F, LI J, LI H. Artificial Bee Colony Algorithm and Pattern Search Hybridized for Global Optimization[J]. Applied Soft Computing, 2013, 13(4):1781-1791. |
| [26] | BELAZI A, El-LATIF A A A, et al. A Simple Yet Efficient S-Box Method Based on Chaotic Sine Map[J]. Optik, 2017,130:1438-1444. |
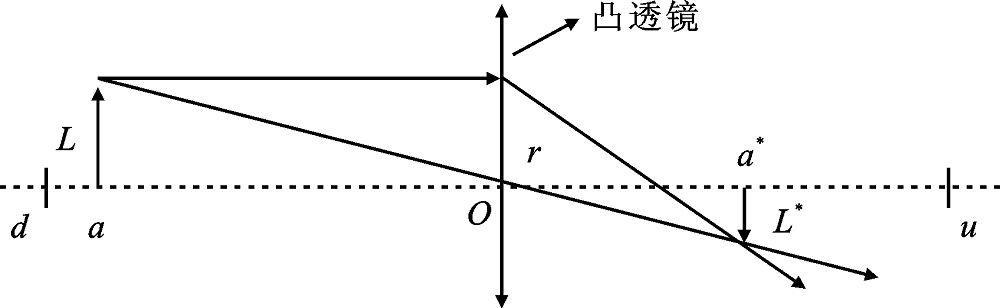
| [27] | 喻飞, 李元香, 魏波, 等. 透镜成像反学习策略在粒子群算法中的应用[J]. 电子学报, 2014, 42(2):230-235. |
| YU Fei, LI Yuanxiang, WEI Bo, et al. The Application of a Novel OBL Based on Lens Imaging Principle in PSO[J]. Acta Electronica Sinica, 2014, 42(2):230-235. | |
| [28] |
陈功, 曾国辉, 黄勃, 等. 融合互利共生和透镜成像学习的HHO算法[J]. 计算机工程与应用, 2022, 58(10):76-86.
doi: 10.3778/j.issn.1002-8331.2106-0105 |
|
CHEN Gong, ZENG Guohui, HUANG Bo, et al. HHO Algorithm Combining Mutualism and Lens Imaging Learning[J]. Computer Engineering and Applications, 2022, 58(10):76-86.
doi: 10.3778/j.issn.1002-8331.2106-0105 |
|
| [29] | 龙文, 伍铁斌, 唐明珠, 等. 基于透镜成像学习策略的灰狼优化算法[J]. 自动化学报, 2020, 46(10):2148-2164. |
| LONG Wen, WU Tiebin, TANG Mingzhu, et al. Grey Wolf Optimization Algorithm Based on Lens Imaging Learning Strategy[J]. Acta Automatica Sinica, 2020, 46(10):2148-2164. | |
| [30] | AWAD N H, ALI M Z, SUGANTHAN P N, et al. Problem Definitions and Evaluation Criteria for the CEC2017 Special Session and Competition on Single Objective Real-Parameter Numerical[R]. Singapore: Nanyang Technological University, 2016. |
| [31] | ABDOLLAHZADEH B, GHAREHCHOPOGH F S, MIRJALILI S. African Vultures Optimization Algorithm:A New Nature-Inspired Metaheuristic Algorithm for Global Optimization Problems[J]. Computers & Industrial Engineering, 2021,158:107408. |
| [32] | TAHER M A, KAMEL S, JURADO F, et al. Modified Grasshopper Optimization Framework for Optimal Power Flow Solution[J]. Electrical Engineering, 2019,101:121-148. |
| [33] | TANABE R, FUKUNAGA A. Success-History Based Parameter Adaptation for Differential Evolution[C]//2013 IEEE Congress on Evolutionary Computation. Piscataway:IEEE, 2013: 71-78. |
| [34] | DERRAC J, GARCía S, MOLINA D, et al. A Practical Tutorial on The Use of Nonparametric Statistical Tests as a Methodology for Comparing Evolutionary and Swarm Intelligence Algorithms[J]. Swarm & Evolutionary Computation, 2011, 1(1):3-18. |
| [35] | ŽALIK K R. Cluster Validity Index for Estimation of Fuzzy Clusters of Different[J]. Pattern Recognition, 2010, 43(10):3374-3390. |
| [36] | YU J, SU Y, LIAO Y. The Path Planning of Mobile Robot by Neural Networks and Hierarchical Reinforcement Learning[J]. Frontiers in Neurorobotics, 2020,14:63. |
| [37] |
DONG L, HE Z, SONG C, et al. A Review of Mobile Robot Motion Planning Methods:from Classical Motion Planning Workflows to Reinforcement Learning-Based Architectures[J]. Journal of Systems Engineering and Electronics, 2023, 34(2):439-459.
doi: 10.23919/JSEE.2023.000051 |
| [1] | ZHU Weijun;XU Zhaohui;ZHANG Haibin;YANG Weidong. DNA algorithm for k-edge induced sub-graphs of directed graphs [J]. J4, 2013, 40(5): 175-180. |
| [2] | JIANG Jianguo;LIU Yongqing;SHANG Haiba;LIN Longjun;WANG Shuangji. Improved electromagnetism-like mechanism algorithm [J]. J4, 2013, 40(3): 87-94. |
| [3] |
ZHONG Ming-fu;HU Yu-pu;CHEN Jie.
Square attack on the 14-round block cipher SMS4 [J]. J4, 2008, 35(1): 105-109. |
| [4] |
CHI Xiao-ni;LIU San-yang.
A primal-dual infeasible-interior-point algorithm for second-order cone programming [J]. J4, 2007, 34(2): 307-311. |
|
||