| [1] |
王祥科, 刘志宏, 丛一睿, 等. 小型固定翼无人机集群综述和未来发展[J]. 航空学报, 2020, 41(4):023732.
|
|
WANG Xiangke, LIU Zhihong, CONG Yirui, et al. Miniature Fixed-Wing UAV Swarms:Review and Outlook[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(4):023732.
|
| [2] |
徐子蒙, 王博文, 云霄, 等. 灾后无人机不确定偏好序下稳定中继选择方法[J]. 西安电子科技大学学报, 2022, 49(6):32-50.
|
|
XU Zimeng, WANG Bowen, YUN Xiao, et al. Stable Relay Selection Method under an Uncertain Preference Ordinal for UAV in Post-Disaster[J]. Journal of Xidian University, 2022, 49(6):32-50.
|
| [3] |
TRIANTAFYLLOU A, ZORBAS D, SARIGIANNIDIS P. Time-Slotted LoRa MAC with Variable Payload Support[J]. Computer Communications, 2022, 193:146-154.
|
| [4] |
WU J, LU H, XIANG Y, et al. SATMAC:Self-Adaptive TDMA-Based MAC Protocol for VANETs[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(11):21712-21728.
|
| [5] |
KO S W, CHEA H, HAN K, et al. V2X-Based Vehicular Positioning:Opportunities,Challenges,and Future Directions[J]. IEEE Wireless Communications, 2021, 28(2):144-151.
|
| [6] |
KABIRI M, CIMARELLI C, BAVLE H, et al. A Review of Radio Frequency Based Localisation for Aerial and Ground Robots with 5G Future Perspectives[J]. Sensors, 2023,23,188.
|
| [7] |
XUE C, LI T, LI Y. Radio Frequency Based Distributed System for Noncooperative UAV Classification and Positioning[J]. Journal of Information and Intelligence, 2024, 2(1):42-51.
|
| [8] |
DIMAKIS A G, KAR S, MOURA J M F, et al. Gossip Algorithms forDistributed Signal Processing[J]. Proceedings of the IEEE, 2010, 98(11):1847-1864.
|
| [9] |
BARRY J, WALSH J. A Review of Multi-Sensor Fusion System for Large Heavy Vehicles off Road in Industrial Environments[C]//2020 31st Irish Signals and Systems Conference(ISSC).Piscataway:IEEE, 2020:1-6.
|
| [10] |
SEIJO Ó, VAL I, LUVISOTTO M, et al. Clock Synchronization for Wireless Time-Sensitive Networking:A March from Microsecond to Nanosecond[J]. IEEE Industrial Electronics Magazine, 2021, 16(2):35-43.
|
| [11] |
MING Z, PANG H, XU Y, et al. Estimating Clock Skew with One-Way Timestamps[J]. IEEE Communications Letters, 2022, 26(11):2591-2595.
|
| [12] |
SEIJO Ó, LOPEZ-FERNANDEZ J A, BERNHARD H P, et al. Enhanced Timestamping Method for Subnanosecond Time Synchronization in IEEE 802.11 over WLAN Standard Conditions[J]. IEEE Transactions on Industrial Informatics, 2020, 16(9):5792-5805.
|
| [13] |
PRAGER S, HAYNES M S, MOGHADDAM M. Wireless Subnanosecond RF Synchronization for Distributed Ultrawideband Software-Defined Radar Networks[J]. IEEE Transactions on Microwave Theory and Techniques, 2020, 68(11):4787-4804.
|
| [14] |
MERLO J M, MGHABGHAB S R, NANZER J A. Wireless Picosecond Time Synchronization for Distributed Antenna Arrays[J]. IEEE Transactions on Microwave Theory and Techniques, 2023, 71(4):1720-1731.
|
| [15] |
MILLS D, DELAWARE U, MARTIN J, et al. Network Time Protocol Version 4:Protocol and Algorithms Specification(2023)[S/OL].[2023-06-05].
|
| [16] |
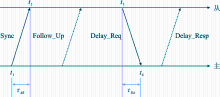
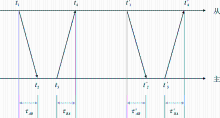
IEEE. IEEE Standard for a Precision Clock Synchronization Protocol for Networked Measurement and Control Systems:IEEE Std 1588-2008[S]. New York: IEEE Standards Association, 2008.
|
| [17] |
SEOL Y, HYEON D, MIN J, et al. Timely Survey of Time-Sensitive Networking:Past and Future Directions[J]. IEEE Access, 2021, 9:142506-142527.
|
| [18] |
白燕, 卢晓春, 高天. 基于单点伪距归算的星间链路时间同步改进算法[J]. 武汉大学学报·信息科学版, 2021, 46(7):1044-1052.
|
|
BAI Yan, LU Xiaochun, GAO Tian. An Improved Algorithm for Inter-Satellite Link Time Synchronization Based on Single-Point Pseudo-Range Reduction[J]. Geomatics and Information Science of Wuhan University, 2021, 46(7):1044-1052.
|
| [19] |
于雪晖, 王盾, 李周, 等. 双向比对高精度物理时间同步方法[J]. 航空学报, 2019, 40(5):203-217.
|
|
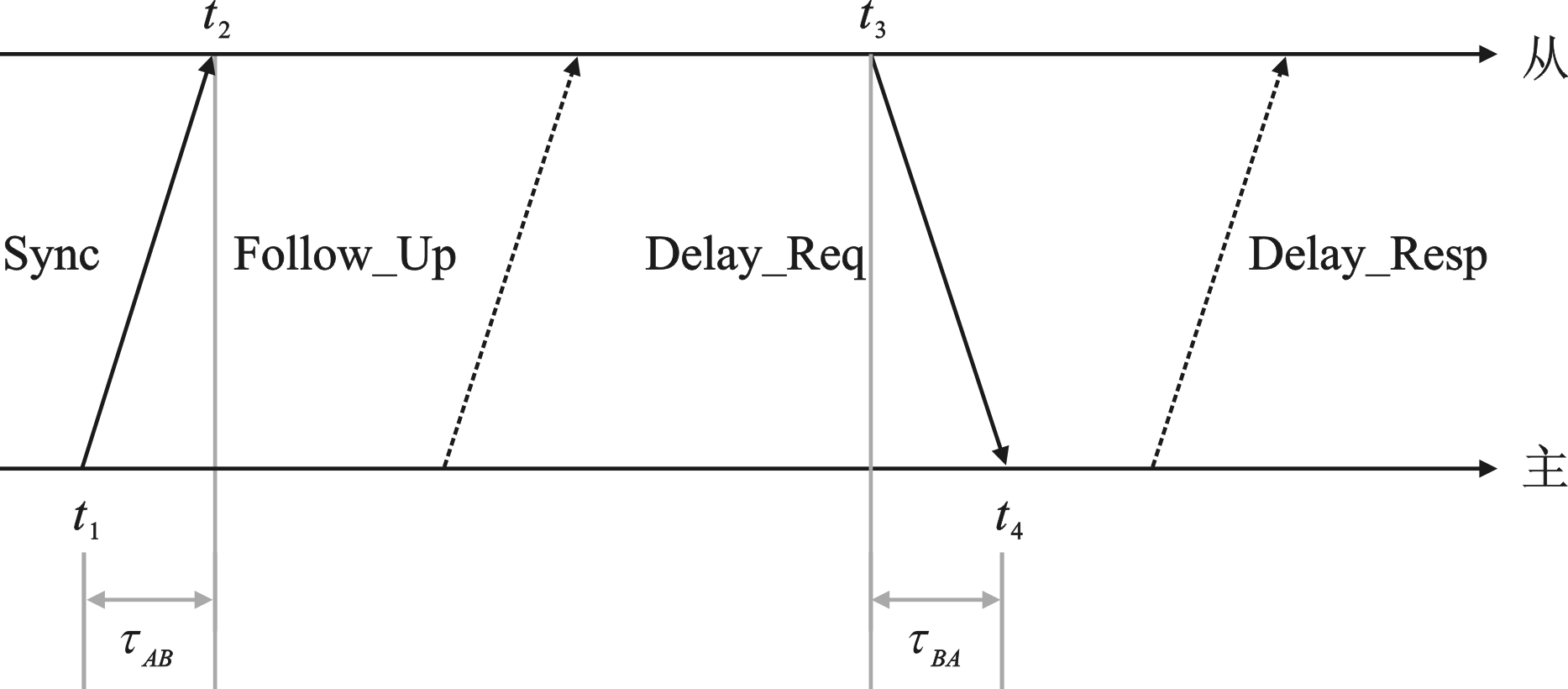
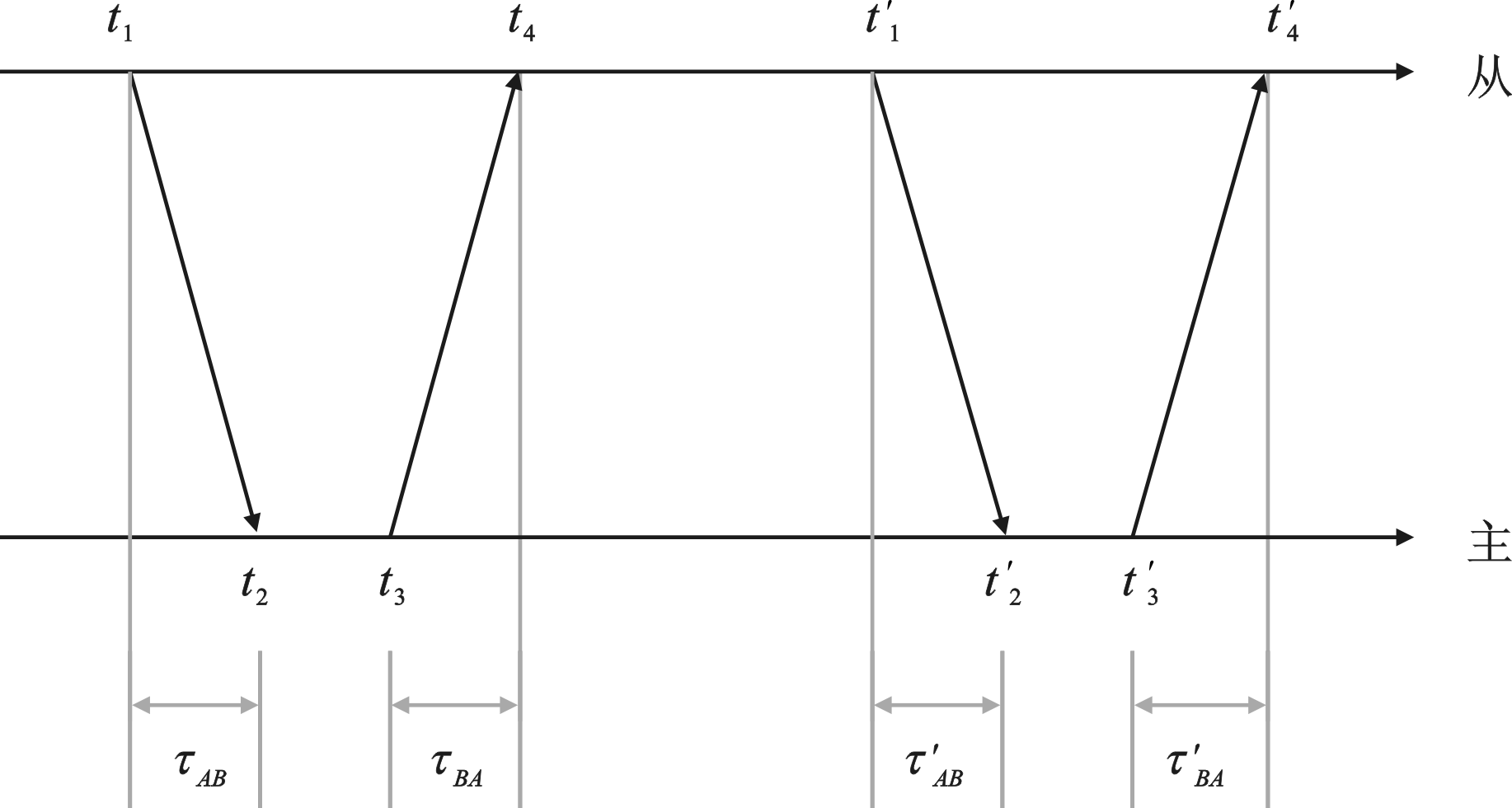
YU Xueui, WANG Dun, LI Zhou, et al. High Accuracy Physical Time Synchronization Method Based on Two-Way Comparison[J]. Acta Aeronautica et Astronautica Sinica, 2019, 40(5):203-217.
|
| [20] |
HUANG F, CHEN Y, LI T, et al. Analysis and Correction to the Influence of Satellite Motion on the Measurement of Inter-Satellite Two-Way Clock Offset[J]. EURASIP Journal on Wireless Communications and Networking, 2019, 2019(1):1-7.
|
| [21] |
ZHAO S, GUO N, ZHANG X P, et al. Sequential Doppler-Shift-Based Optimal Localization and Synchronization with TOA[J]. IEEE Internet of Things Journal, 2022, 9(17):16234-16246.
|
 ), DUAN Baiyu1,2(
), DUAN Baiyu1,2(