

Journal of Xidian University ›› 2023, Vol. 50 ›› Issue (2): 101-111.doi: 10.19665/j.issn1001-2400.2023.02.011
• nformation and Communications Engineering • Previous Articles Next Articles
CHEN Zhen( ),LI Cuiyun(),LI Xiang()
),LI Cuiyun(),LI Xiang()
Received:2022-05-10
Online:2023-04-20
Published:2023-05-12
CLC Number:
CHEN Zhen,LI Cuiyun,LI Xiang. Algorithm for tracking the 3D extended target based on the B-spline surface[J].Journal of Xidian University, 2023, 50(2): 101-111.
"
"
"
"
"
"
"
| IoU | 单传感器B-Spline-PMBM算法 | 多传感器B-Spline-PMBM算法 |
|---|---|---|
| 0.2 | 7.54 | 2.88 |
| 0.4 | 10.23 | 4.96 |
| 0.6 | 6.10 | |
| 0.8 | 7.68 |
"

"
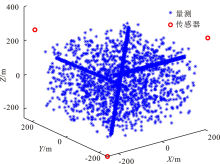
| 目标 | 目标运动状态初始化/m | 存活时间/s |
|---|---|---|
| 1 | x1=[-175,-175,-175,7,7,7]T | t1∈[1,50] |
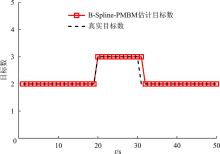
| 2 | x2=[-175,150,120,5,-5,6]T | t2∈[1,30] |
| 3 | x3=[-175,-150,140,-5,7,-5]T | t3∈[20,50] |
"
"

"
"
"
"
"
"
"
"
"

"
"
"
"
"

| [1] |
GARCIA-FERNANDEZÁ F, WILLIAMS J L, GRANSTROM K, et al. Poisson Multi-Bernoulli Mixture Filter:Direct Derivation and Implementation[J]. IEEE Transactions on Aerospace and Electronic Systems, 2018, 54(4):1883-1901.
doi: 10.1109/TAES.2018.2805153 |
| [2] |
KOCH J W. Bayesian Approach to Extended Object and Cluster Tracking using Random Matrices[J]. IEEE Transactions on Aerospace and Electronic Systems, 2008, 44(3):1042-1059.
doi: 10.1109/TAES.2008.4655362 |
| [3] | BAUM M, HANEBECK U D. Random Hypersurface Models for Extended Object Tracking[C]//IEEE International Symposium on Signal Processing & Information Technology. Piscataway:IEEE, 2009:178-183. |
| [4] | BAUM M, HANEBECK U D. Shape Tracking of Extended Objects and Group Targets with Star-Convex RHMs[C]//14th International Conference on Information Fusion. Piscataway:IEEE, 2011:1-8. |
| [5] | SUN L, LAN J, LI X R. Extended Target Tracking Using Star-Convex Model with Nonliear Inequality Constraints[C/OL].[2022-04-20]. https://xueshu.baidu.com/usercenter/paper. |
| [6] | 李翠芸, 李洋, 姬红兵, 等. 一步数据关联GLMB扩展目标跟踪算法[J]. 西安电子科技大学学报, 2020, 47(5):137-143. |
| LI Cuiyun, LI Yang, JI Hongbing, et al. GLMB Extended Target Tracking Based on One-Step Data Association[J]. Journalof Xidian University, 2020, 47(5):137-143. | |
| [7] |
LAN J, LI X R. Tracking of Maneuvering Non-Ellipsoidal Extended Object or Target Group Using Random Matrix[J]. IEEE Transactions on Signal Processing, 2014, 62(9):2450-2463.
doi: 10.1109/TSP.2014.2309561 |
| [8] | HIRSCHER T, SCHEEL A, REUTER S, et al. Multiple Extended Object Tracking Using Gaussian Processes[C]// 2016 19th International Conference on Information Fusion.Piscataway:IEEE, 2016:868-875. |
| [9] | 陈辉, 杜金瑞, 韩崇昭. 基于星凸形随机超曲面模型多扩展目标多伯努利滤波器[J]. 自动化学报, 2020, 46(5):909-922. |
| CHEN Hui, DU Jinrui, HAN Chongzhao. A Multiple Extended Target Multi-Bernouli Filter Based on Star-convex Random Hypersurface Model[J]. ACTA AUTOMATICA SINICA, 2020, 46(5):909-922. | |
| [10] |
DANIYAN A, LAMBOTHARAN S, DELIGIANNIS A, et al. Bayesian Multiple Extended Target Tracking Using Labeled Random Finite Sets and Splines[J]. IEEE Transactions on Signal Processing. 2018, 66(22):6076-6091.
doi: 10.1109/TSP.78 |
| [11] |
GONG Y, CUI C, WU B. A GGIW-PHD Filter for Multiple Non-Ellipsoidal Extended Targets Tracking with Varying Number of Sub-Objects[J]. IEEE Access, 2021, 9:64719-64731.
doi: 10.1109/ACCESS.2021.3075941 |
| [12] | CAO X, LAN J, LI X R. Extension-Deformation Approach to Extended Object Tracking[C]// 2016 19th International Conference on Information Fusion.Piscataway:IEEE, 2016:1185-1192. |
| [13] |
ZHANG L, LAN J. Tracking of Extended Object Using Random Matrix with Non-Uniformly Distributed Measurements[J]. Transactions on Signal Processing, 2021, 69:3812-3825.
doi: 10.1109/TSP.2021.3090946 |
| [14] |
YANG J L, LI P, GE H W. Extended Target Shape Estimation by Fitting B-Spline Curve[J/OL].[2014-06-25].DOI:10.1155/2014/741892.
doi: 10.1155/2014/741892 |
| [15] | FAION F, BAUM M, HANEBECK U D. Tracking 3D Shapes in Noisy Point Clouds with Random Hypersurface Models[C]// 2012 15th International Conference on Information Fusion.Piscataway:IEEE, 2012:2230-2235. |
| [16] | EBERTF, WUENSCHEH. Dynamic Object Tracking and 3D Surface Estimation using Gaussian Processes and Extended Kalman Filter[C]//2019 IEEE Intelligent Transportation Systems Conference. Piscataway:IEEE, 2019:1122-1127. |
| [17] | GRANSTROMK, FATEMIM, SVENSSONL. Gamma Gaussian Inverse-Wishart Poisson Multi-Bernoulli Filter for Extended Target Tracking[C/OL].[2016-07-05]. https://ieeexplore.ieee.org/document/7527981/references. |
| [18] | ZHOUD, FANG J, SONG X, et al. IoU Loss for 2D/3D Object Detection[C]// 2019 International Conference on 3D Vision.Piscataway:IEEE, 2019:85-94. |
| [19] | 宋建锋, 苗启广, 王崇晓, 等. 注意力机制的多尺度单目标跟踪算法[J]. 西安电子科技大学学报, 2021, 48(5):110-116. |
| SONG Jianfeng, MIAO Qiguang, WANG Chongxiao, et al. Multi-Scale Single Object Tracking Based on the Attention Mechanism[J]. Journal of Xidian University, 2021, 48(5):110-116. |
| [1] | LI Cuiyun,LI Yang,JI Hongbing,SHI Renzheng. GLMB extended target tracking based on one-step data association [J]. Journal of Xidian University, 2020, 47(5): 137-143. |
| [2] | WANG Shiqiang;ZHANG Dengfu;BI Duyan;YONG Xiaoju. Novel radar signal sorting method with low complexity [J]. J4, 2011, 38(4): 148-153. |
|