

Journal of Xidian University ›› 2024, Vol. 51 ›› Issue (4): 51-66.doi: 10.19665/j.issn1001-2400.20240104
• Information and Communications Engineering • Previous Articles Next Articles
ZHANG Yongquan1( ), LI Zhibin1(), ZHANG Wenbo1(), SU Zhenzhen2()
), LI Zhibin1(), ZHANG Wenbo1(), SU Zhenzhen2()
Received:2023-10-11
Online:2024-08-20
Published:2024-02-27
Contact:
ZHANG Wenbo
E-mail:zhangyq@xidian.edu.cn;lizhibin@stu.xidian.edu.cn;wbzhang@xidian.edu.cn;zzsu@xidian.edu.cn
CLC Number:
ZHANG Yongquan, LI Zhibin, ZHANG Wenbo, SU Zhenzhen. Multi-source sensor box particle LMB filtering algorithm[J].Journal of Xidian University, 2024, 51(4): 51-66.
"
"
"

"
"
"
"
"
"
"
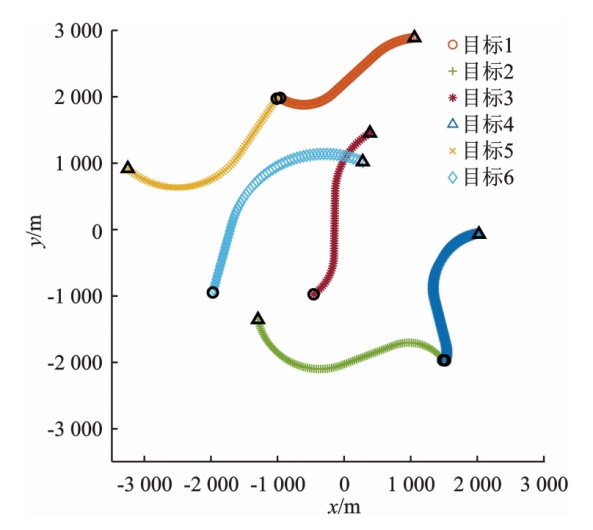
| 目标编号 | 初始状态 | 新生时刻 | 消亡时刻 |
|---|---|---|---|
| 1 | [-1 000,28,2 000,-20,500,0,3]T | 1 | 70 |
| 2 | [1 500,-18,-2 000,28,500,0,3]T | 1 | 100 |
| 3 | [1 500,10,-2 000,25,500,0,3]T | 8 | 80 |
| 4 | [-1 000,-25,2 000,-30,500,0,3]T | 15 | 100 |
| 5 | [-500,50,-1 000,-52,500,0,3]T | 25 | 100 |
| 6 | [-2 000,16,-1 000,40,500,0,3]T | 30 | 100 |
"
"
| 参数名称 | 数值 | 单位 |
|---|---|---|
| 采样间隔T | 1 | s |
| 方位角量测标准差σα | 1 | rad |
| 俯仰角量测标准差σβ | 1 | rad |
| x方向距离标准差σx | 10 | m |
| y方向距离标准差σy | 10 | m |
| z方向距离标准差σz | 10 | m |
| 目标存活概率 | 0.99 | |
| 传感器检测概率 | 0.99 |

"
"
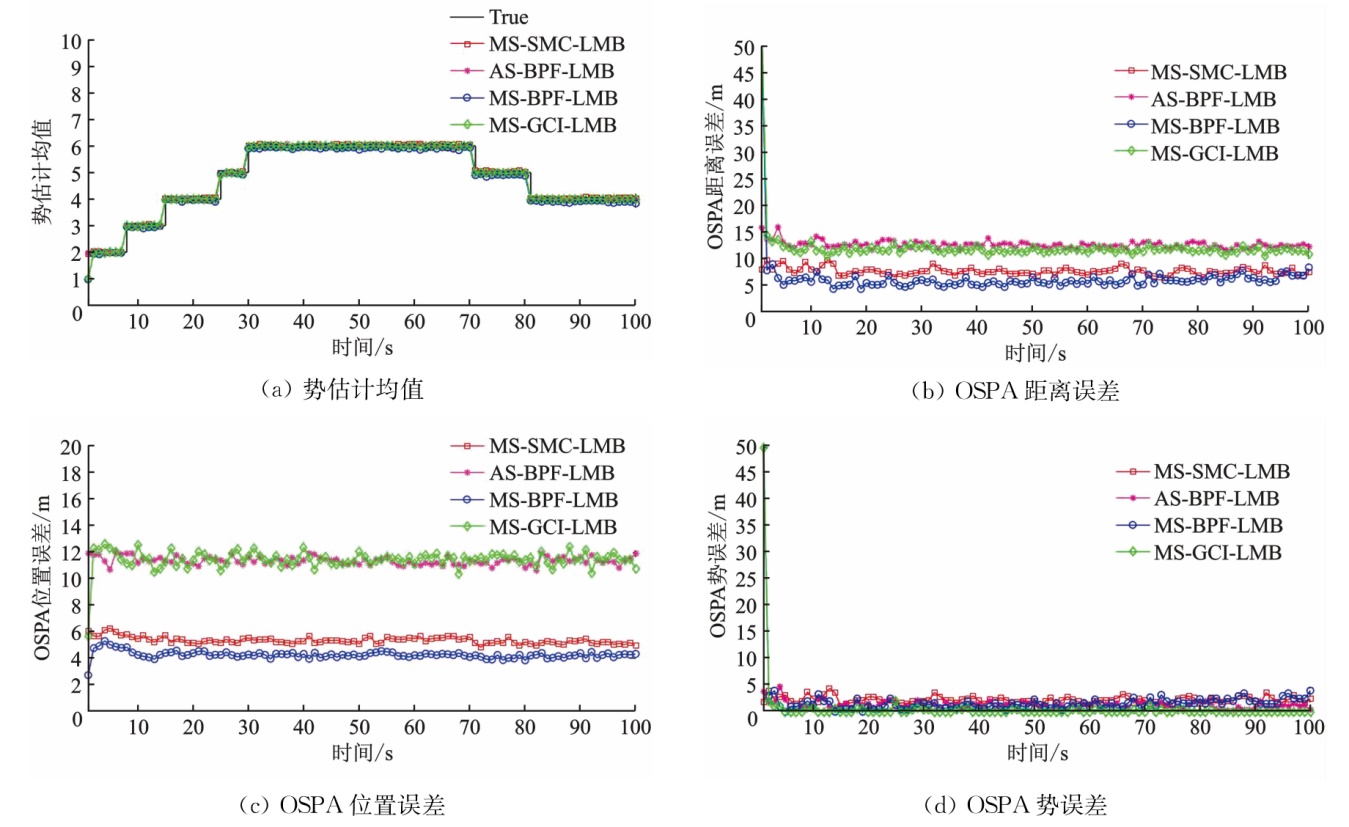
| 算法 | 运行时间/s |
|---|---|
| MS-BPF-LMB | 25.67 |
| MS-SMC-LMB | 41.39 |
| AS-BPF-LMB | 21.34 |
| MS-GCI-LMB | 69.13 |

"


"
"
| [1] | 张逸宸, 水鹏朗, 廖沫. 目标回波特征辅助的海面多目标跟踪方法[J]. 西安电子科技大学学报, 2023, 50(5):1-10. |
| ZHANG Yichen, SHUI Penglang, LIAO Mo. Sea-Surface Multi-Target Tracking Method Aided by Target Returns Feature[J]. Journal of Xidian University, 2023, 50(5):1-10. | |
| [2] | 侯建华, 余宁远, 项俊. 基于运动模型和数据关联的多目标跟踪[J]. 中南民族大学学报(自然科学版), 2023, 42(2):260-266. |
| HOU Jianhua, YU Ningyuan, XIANG Jun. Multi-Object Tracking Based on Motion Model and Data Association[J]. Journal of South-Central Minzu University (Natural Science Edition), 2023, 42(2):260-266. | |
| [3] | 陈振, 李翠芸, 李想. B样条曲面三维扩展目标跟踪算法[J]. 西安电子科技大学学报, 2023, 50(2):101-111. |
| CHEN Zhen, LI Cuiyun, LI Xiang. Algorithm for Tracking the 3D Extended Target Based on the B-Spline Surface[J]. Journal of Xidian University, 2023, 50(2):101-111. | |
| [4] | REUTER S, VO B T, VO B N, et al. The Labeled Multi-Bernoulli Filter[J]. IEEE Transactions on Signal Processing, 2014, 62(12):3246-3260. |
| [5] | ZHANG Y Q, JI H B, HU Q. A Box-Particle Implementation of Standard PHD Filter for Extended Target Tracking[J]. Information Fusion, 2017,34:55-69. |
| [6] | ZHANG Y Q, JI H B, HU Q. A Fast Ellipse Extended Target PHD Filter Using Box-Particle Implementation[J]. Mechanical Systems and Signal Processing, 2018,99:57-72. |
| [7] | ZHANG Y Q, JI H B, GAO X B, HU Q. An Ellipse Extended Target CBMeMBer Filter Using Gamma and Box-Particle Implementation[J]. Signal Processing, 2018,149:88-102. |
| [8] | 张翔, 郑玲, 李以农, 等. 融合视觉与雷达数据的改进粒子滤波车辆目标跟踪[J]. 重庆大学学报, 2022, 45(9):28-38. |
| ZHANG Xiang, ZHENG Ling, LI Yinong, et al. Improved Particle Filter Vehicle Tracking Based on Vision and Radar Sensor Fusion[J]. Journal of Chongqing University, 2022, 45(9):28-38. | |
| [9] | LI S, YI W, HOSEINNEZHAD R, et al. Robust Distributed Fusion with Labeled Random Finite Sets[J]. IEEE Transactions on Signal Processing, 2018, 66(2):278-293. |
| [10] | LI S, BATTISTELLI G, CHISCI L, et al. Computationally Efficient Multi-Agent Multi-Object Tracking with Labeled Random Finite Sets[J]. IEEE Transactions on Signal Processing, 2019, 67(1):260-275. |
| [11] | 陈旭志, 杨金龙. 一种状态扩维标签匹配的分布式融合算法[J]. 信号处理, 2022, 38(7):1467-1480. |
| CHEN Xuzhi, YANG Jinlong. A Distributed Fusion Algorithm Based on State-Extended Label Matching[J]. Journal of Signal Processing, 2022, 38(7):1467-1480. | |
| [12] | ZHANG Y, SHANG A, ZHANG W, et al. A Measurement Fusion Algorithm of Active and Passive Sensors Based on Angle Association for Multi-Target Tracking[J]. Information Fusion, 2024,106:102267. |
| [13] | 曾雅俊, 王俊, 魏少明, 等. 分布式多传感器多目标跟踪方法综述[J]. 雷达学报, 2023, 12(1):197-213. |
| ZENG Yajun, WANG Jun, WEI Shaoming, et al. Review of the Method for Distributed Multi-Sensor Multi-Target Tracking[J]. Journal of Radars, 2023, 12(1):197-213. | |
| [14] | SUN W, HAN Y. A New Multiple Targets Tracking Algorithm Based on Improved MHT Algorithm[C]//2022 International Conference on Computer Engineering and Artificial Intelligence (ICCEAI).Piscataway:IEEE, 2022: 26-30. |
| [15] | 张立勇, 张利, 李丹. 基于最优分组原则的多传感器分组加权融合算法[J]. 仪器仪表学报, 2008, 29(1):200-205. |
| ZHANG Liyong, ZHANG Li, LI Dan. Grouping Weighted Fusion Algorithm for Multi-Sensor and Its Optimal Grouping Principle[J]. Chinese Journal of Scientific Instrument, 2008, 29(1):200-205. | |
| [16] | 刘钊, 戴斌, 刘大学. 多传感器信息融合中时间同步方法的研究[J]. 计算机仿真, 2009(6):124-127. |
| LIU Zhao, DAI Bin, LIU Daxue. A Time Synchronization Approach for Multi-Sensor Fusion[J]. Computer Simulation, 2009(6):124-127. | |
| [17] | 贾润亮. 无线传感器网络成对节点同步方法研究[J]. 无线互联科技, 2022, 19(9):13-15. |
| JIA Runliang. Research on Pairwise Node Synchronization in Wireless Sensor Networks[J]. Wireless Internet Technology, 2022, 19(9):13-15. | |
| [18] | 李璐, 雷明. 密集杂波下的高斯混合信度传播多目标跟踪[J]. 哈尔滨工业大学学报, 2020, 52(4):38-46. |
| LI Lu, LEI Ming. Gaussian Mixture Belief Propagation Multi-Target Tracking under Dense Clutter[J]. Journal of HARBIN Institute of Technology, 2020, 52(4):38-46. | |
| [19] | XU Y, XU K, WAN J, et al. Research on Particle Filter Tracking Method Based on Kalman Filter[C]//2018 2nd IEEE Advanced Information Management,Communicates,Electronic and Automation Control Conference (IMCEC).Piscataway:IEEE, 2018:1564-1568. |
| [20] | 陈辉, 邓东明, 韩崇昭. 基于区间箱粒子多伯努利滤波器的传感器控制策略[J]. 自动化学报, 2021, 47(6):1428-1443. |
| CHEN Hui, DENG Dongming, HAN Chongzhao. Sensor Control Based on Interval Box-particle Multi-Bernoulli Filter[J]. Acta Automatica Sinica, 2021, 47(6):1428-1443. | |
| [21] | QIN Y. Box-Particle Bernoulli Filter for Multipath Target Tracking in OTHR[C]//2019 2nd International Conference on Information Systems and Computer Aided Education (ICISCAE).Piscataway:IEEE, 2019: 567-571. |
| [22] | 冯新喜, 迟珞珈, 王泉. 基于箱粒子滤波的混合标签多伯努利跟踪算法[J]. 控制与决策, 2020, 35(2):507-512. |
| FENG Xinxi, CHI Luojia, WANG Quan. A Hybrid Labeled Multi-Bernoulli Tracking Algorithm Based on Box Particle Filter[J]. Control and Decision, 2020, 35(2):507-512. | |
| [23] | 陈楠祺. 基于箱粒子滤波的随机有限集多目标跟踪算法研究[D]. 西安: 西安电子科技大学, 2019. |
| [24] | MOORE R E, KEARFOTT R B, CLOUD M J. Introduction to Interval Analysis[M]. Philadelphia:SIAM, 2009. |
| [25] | VO B N, VO B T, HOANG H G. An Efficient Implementation of the Generalized Labeled Multi-Bernoulli Filter[J]. IEEE Transactions on Signal Processing, 2016, 65(8):1975-1987. |
| [26] | VO B T, VO B N. Labeled Random Finite Sets and Multi-Object Conjugate Priors[J]. IEEE Transactions on Signal Processing, 2013, 61(13):3460-3475. |
| [27] | VO B N, VO B T, PHUNG D. Labeled Random Finite Sets and the Bayes Multi-Target Tracking Filter[J]. IEEE Transactions on Signal Processing, 2014, 62(24):6554-6567. |
| [28] | JAULIN L, KIEFFER M, DIDRIT O, et al. Applied Interval Analysis[M]. Heidelberg:Springer, 2001. |
| [29] | SCHUHMACHER D, VO B T, VO B N. AConsistent Metric for Performance Evaluation in Multi-Object Filtering[J]. IEEE Transactions on Signal Processing, 2008, 56(8):3447-3457. |
| [1] | HENG Hongjun, YU Longwei. Time series anomaly detection based on multi-scale feature information fusion [J]. Journal of Xidian University, 2024, 51(3): 203-214. |
| [2] | ZHANG Yichen,SHUI Penglang,LIAO Mo. Sea-surface multi-target tracking method aided by target returns features [J]. Journal of Xidian University, 2023, 50(5): 1-10. |
| [3] | LI Cuiyun,HENG Bowen,XIE Jinchi. Anti-occlusion PMBM tracking algorithm optimized by fuzzy inference [J]. Journal of Xidian University, 2023, 50(5): 54-64. |
| [4] | CHEN Zhen,LI Cuiyun,LI Xiang. Algorithm for tracking the 3D extended target based on the B-spline surface [J]. Journal of Xidian University, 2023, 50(2): 101-111. |
| [5] | ZHANG Yunpu,SHAN Ganlin,FU Qiang. Scheduling method for multi-sensor cooperative ground target tracking [J]. Journal of Xidian University, 2022, 49(5): 100-108. |
| [6] | WAN Pengwu,YAO Yuanyuan,YAN Qianli,CHEN Yufei. Passive localization based on energy-time-frequency information fusion [J]. Journal of Xidian University, 2021, 48(6): 105-114. |
| [7] | GU Zhaojun,CHEN Hui,WANG Jialiang,GAO Bing. Target tracking control algorithm for small size quad-rotor helicopter [J]. Journal of Xidian University, 2021, 48(5): 117-127. |
| [8] | LU Yan,LIAO Guisheng,HUANG Qingxiang. Cross-camera moving target tracking algorithm based on sparse representation [J]. Journal of Xidian University, 2021, 48(2): 197-204. |
| [9] | ZHANG Yichen,SHUI Penglang. Improved probabilistic multi-hypothesis tracker via the Poisson point process [J]. Journal of Xidian University, 2021, 48(2): 27-34. |
| [10] | LI Cuiyun,LI Yang,JI Hongbing,SHI Renzheng. GLMB extended target tracking based on one-step data association [J]. Journal of Xidian University, 2020, 47(5): 137-143. |
| [11] | ZHANG Yunpu,SHAN Ganlin,DUAN Xiusheng,WANG Meng. Scheduling of active/passive sensors for radiation control [J]. Journal of Xidian University, 2019, 46(6): 67-74. |
| [12] | WANG Mingjie,JI Hongbing,LIU Long. Student’s t Distribution mixture CPHD filter with noise outliers [J]. Journal of Xidian University, 2019, 46(5): 134-141. |
| [13] | SONG Jianfeng,MIAO Qiguang,SHEN Meng,QUAN Yining,CHEN Yusheng. Algorithm for tracking an infrared single target based on correlation filtering with multi-feature fusion [J]. Journal of Xidian University, 2019, 46(5): 142-147. |
| [14] | LI Cuiyun,CHEN Dongwei,SHI Renzheng. Adaptive target birth δ-generalized labeled multi-Bernoulli filtering algorithm [J]. Journal of Xidian University, 2019, 46(2): 12-16. |
| [15] | BI Cheng,WANG Linglin,LIU Yongxin. Algorithm for the assessment of ship situation based on the parameter adaptive dynamic Bayesian network [J]. Journal of Xidian University, 2019, 46(2): 158-163. |
|
||