Electronic Science and Technology ›› 2019, Vol. 32 ›› Issue (2): 14-19.doi: 10.16180/j.cnki.issn1007-7820.2019.02.004
Previous Articles Next Articles
HAO Jiajun,WANG Yagang,MA Jiangtao
Received:2018-05-22
Online:2019-02-15
Published:2019-01-02
Supported by:CLC Number:
HAO Jiajun,WANG Yagang,MA Jiangtao. Master-slave Control System Simulation of Surgical Robot Based on LabVIEW[J].Electronic Science and Technology, 2019, 32(2): 14-19.
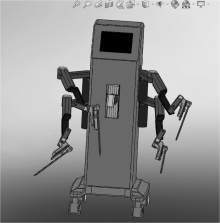
Figure 1.
Slave mechanical arm"
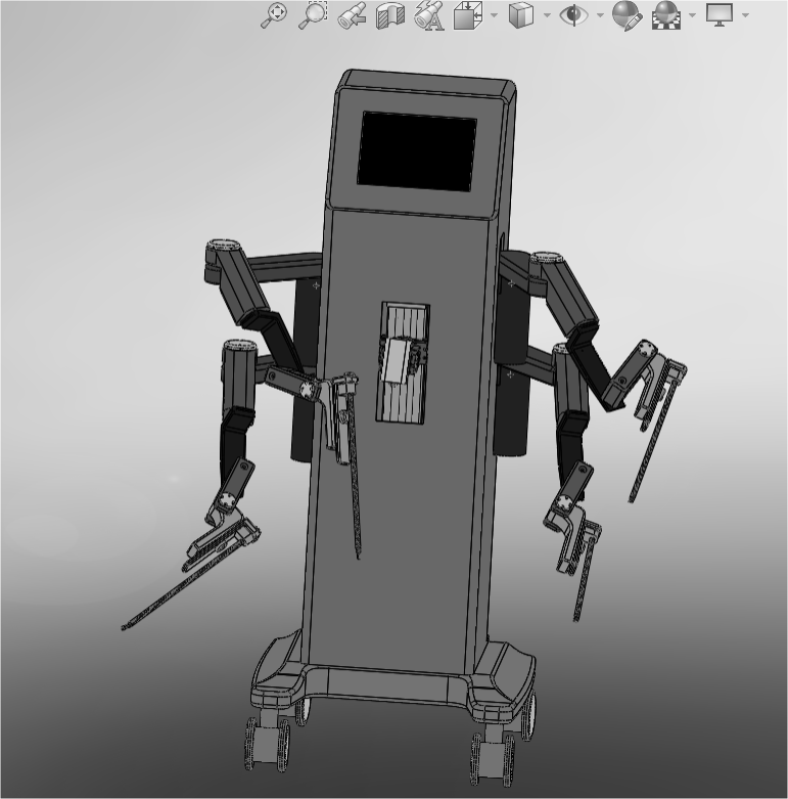

Figure 2.
Master control console"
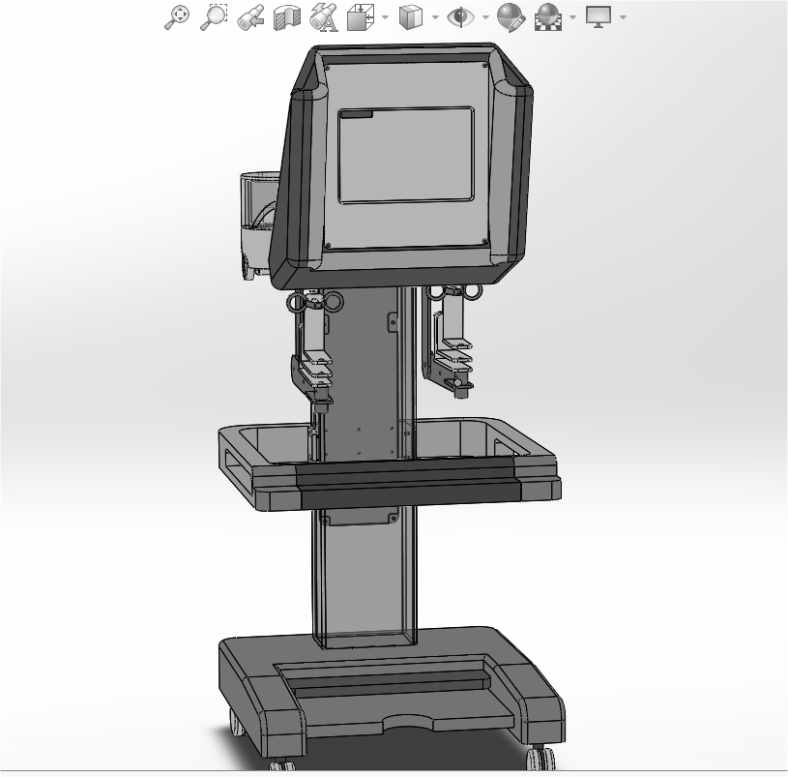
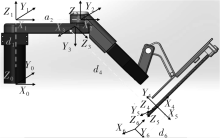
Figure 3.
Coordinate system of slave mechanical arm"
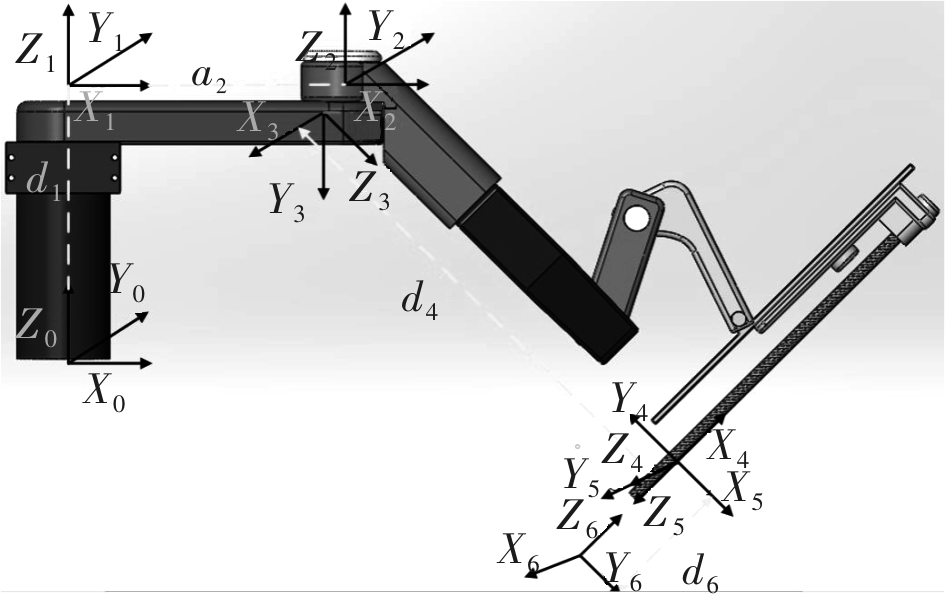
Figure 4.
Coordinate system of master mechanical arm"
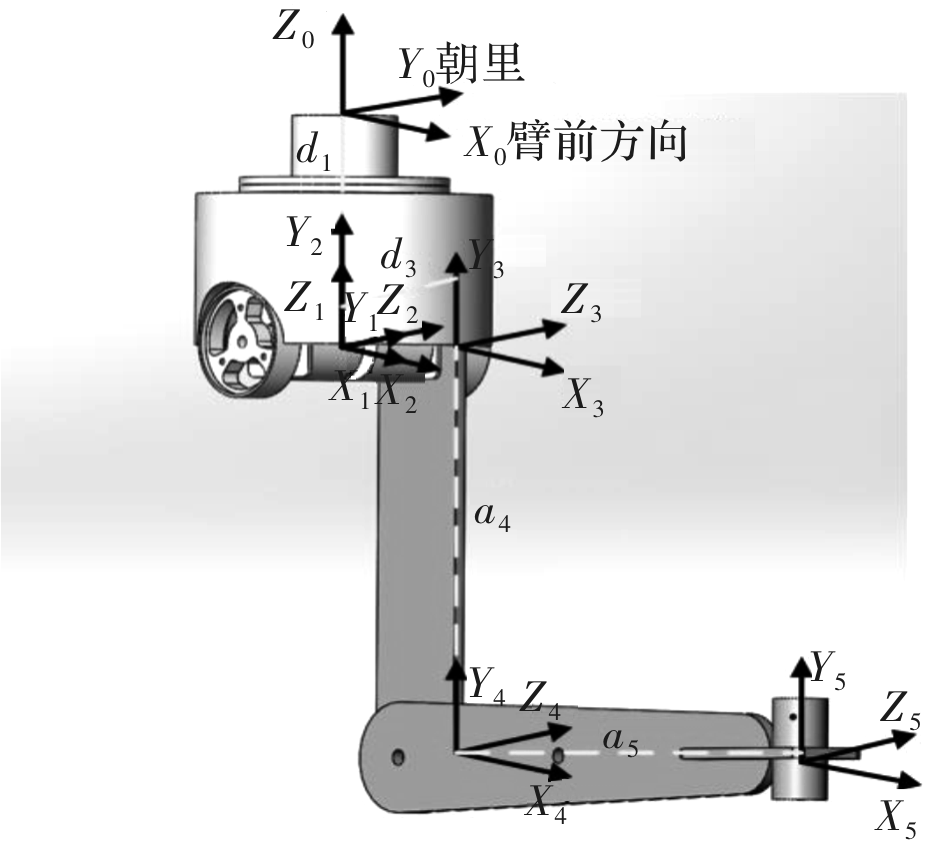
Table 1
DH parameters of master mechanical arm"
| 关节 | ai/mm | αi/(°) | di/mm | θi/(°) |
|---|---|---|---|---|
| 1 | 0 | 0 | 280.6+d1 | 0 |
| 2 | 270 | 0 | 0 | θ2 |
| 3 | 0 | -135 | 0 | θ3 |
| 4 | 0 | -90 | 493.09 | θ4 |
| 5 | 0 | 90 | 0 | θ5 |
| 6 | 0 | 0 | d6 | 0 |
Table 2
DH parameters of slave mechanical arm"
| 关节 | ai/mm | αi/(°) | di/mm | θi/(°) |
|---|---|---|---|---|
| 1 | 0 | 0 | -119.15 | θ1 |
| 2 | 1 | -90 | 0 | 0 |
| 3 | 0 | 0 | 37.82 | 0 |
| 4 | 216 | 0 | 0 | θ4+90 |
| 5 | 297.02 | 0 | 0 | θ5-90 |
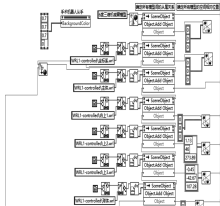
Figure 5.
Partial block diagram"
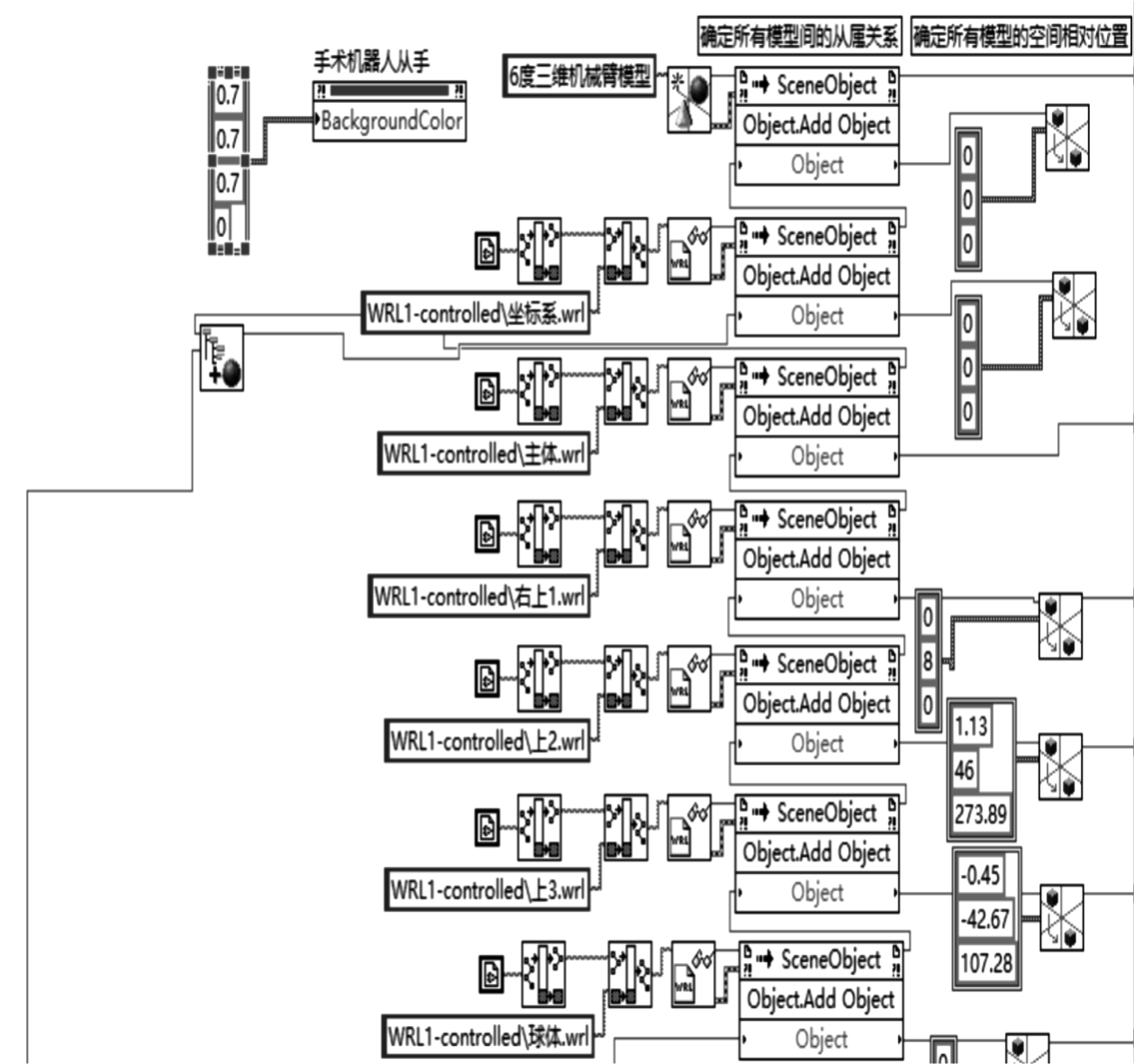

Figure 6.
Slave mechanical arm of LabVIEW"
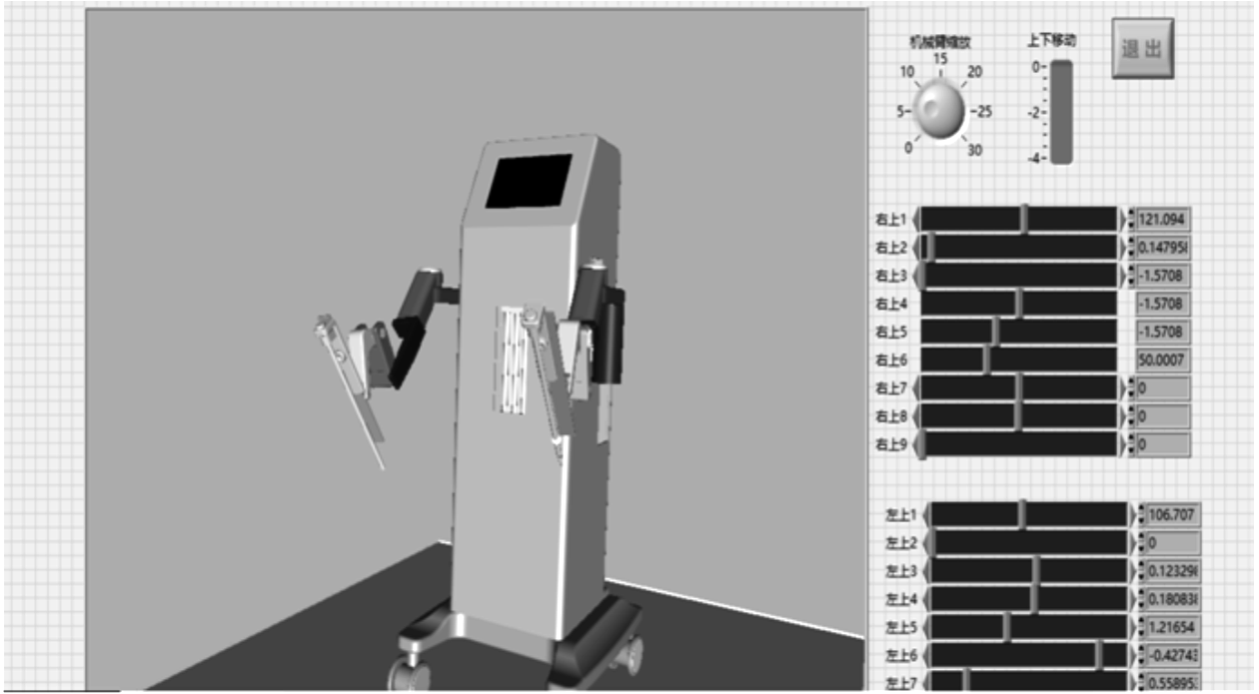

Figure 7.
Master control console of LabVIEW"
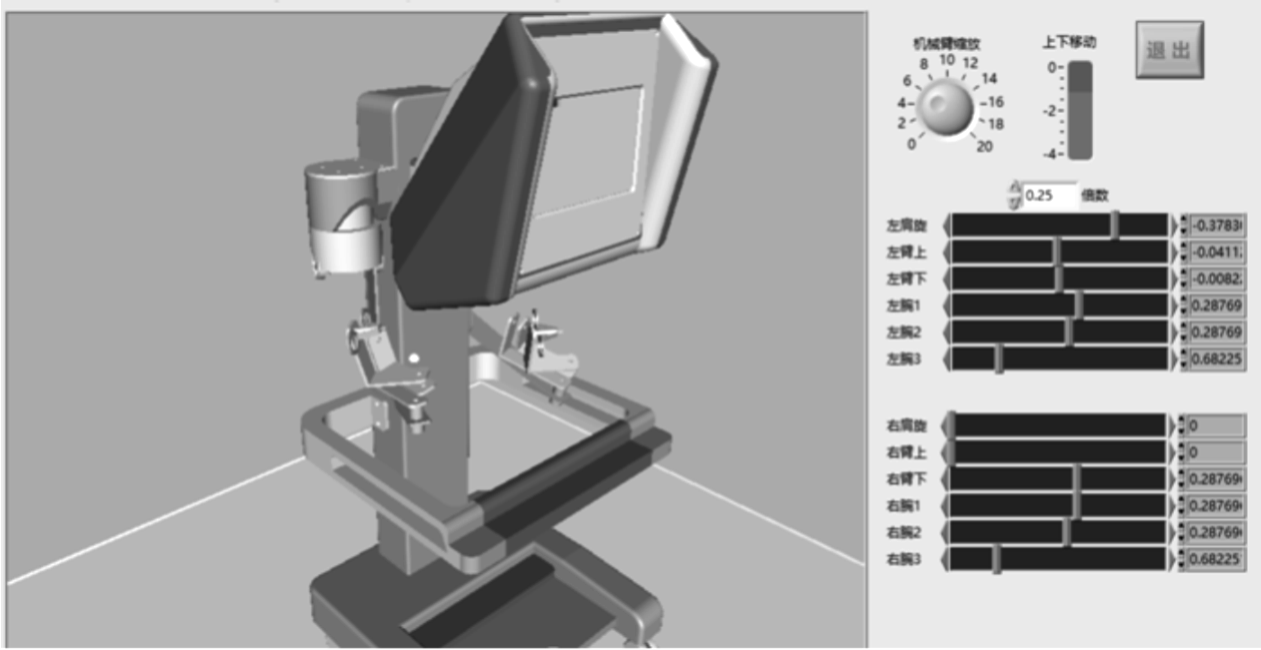
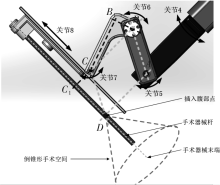
Figure 8.
Parallel quadrilateral RCM structure"
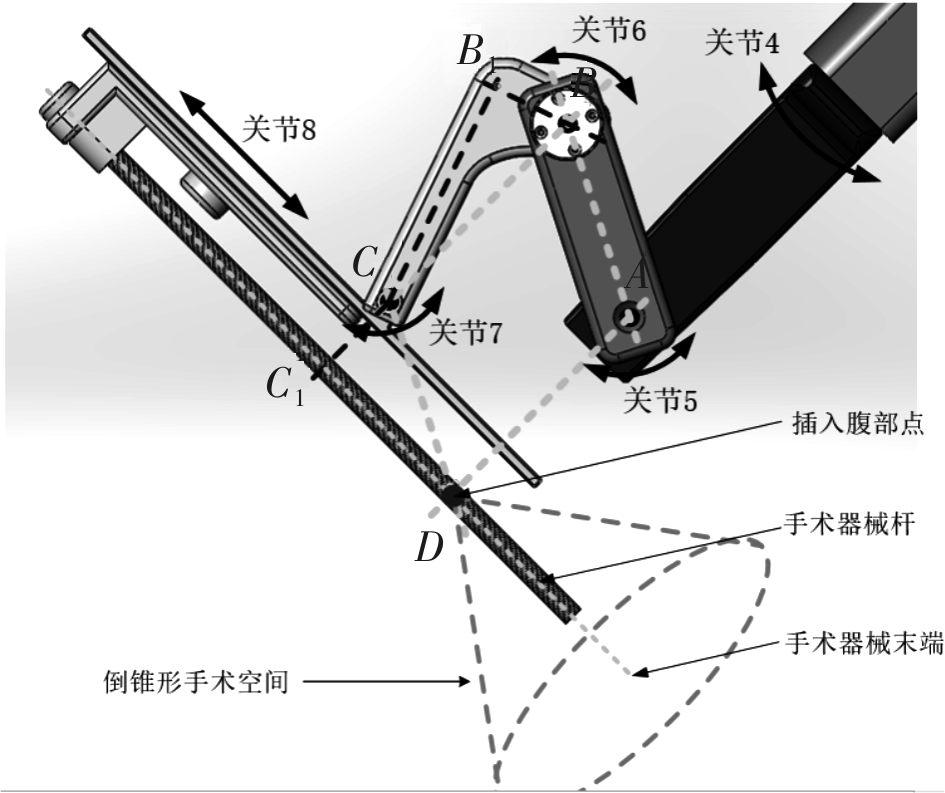
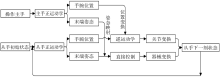
Figure 9.
Master-slave control mode"
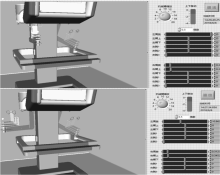
Figure 10.
The motion state of the master mechanical arm"
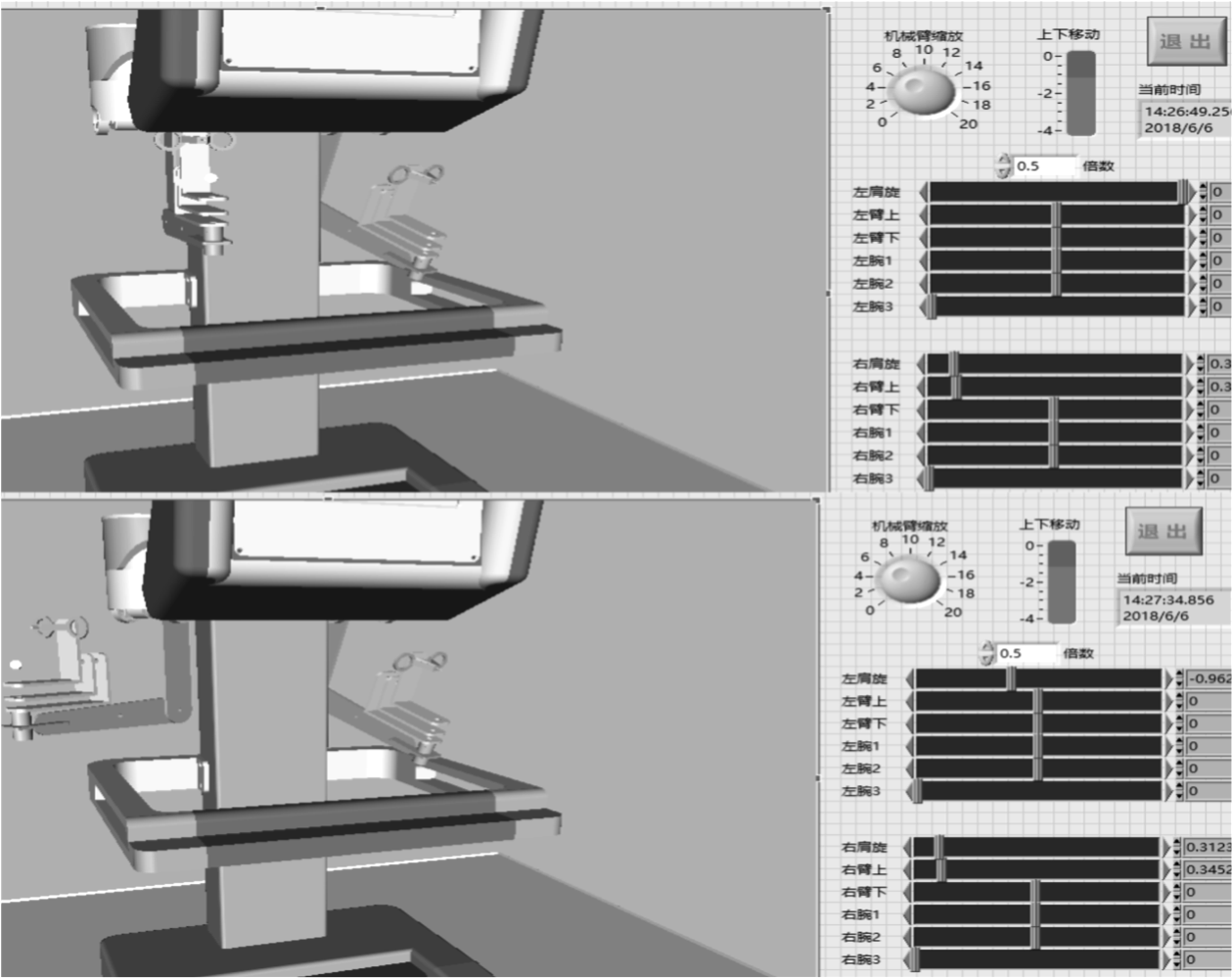
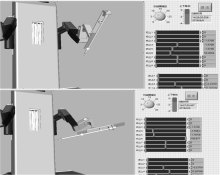
Figure 11.
The motion state of the slave mechanical arm"

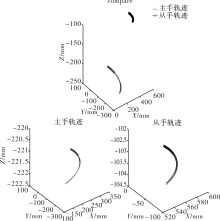
Figure 12.
Comparison of the motion trail based on 0.3 times"
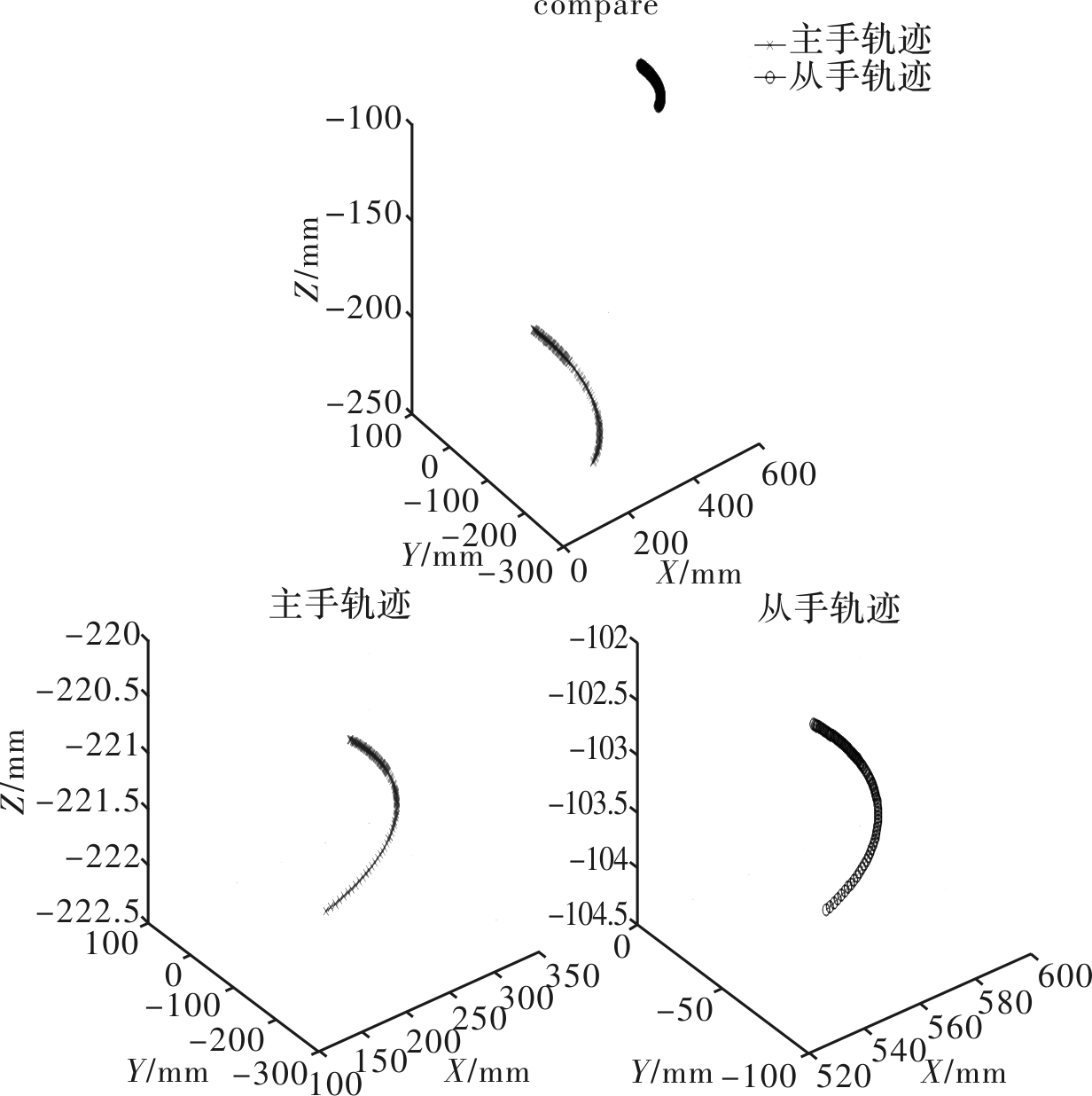
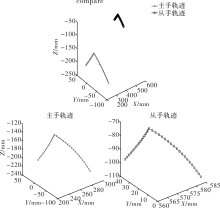
Figure 13.
Comparison of the motion trail based on 0.4 times"

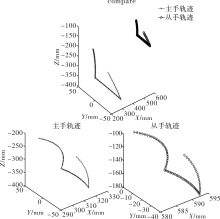
Figure 14.
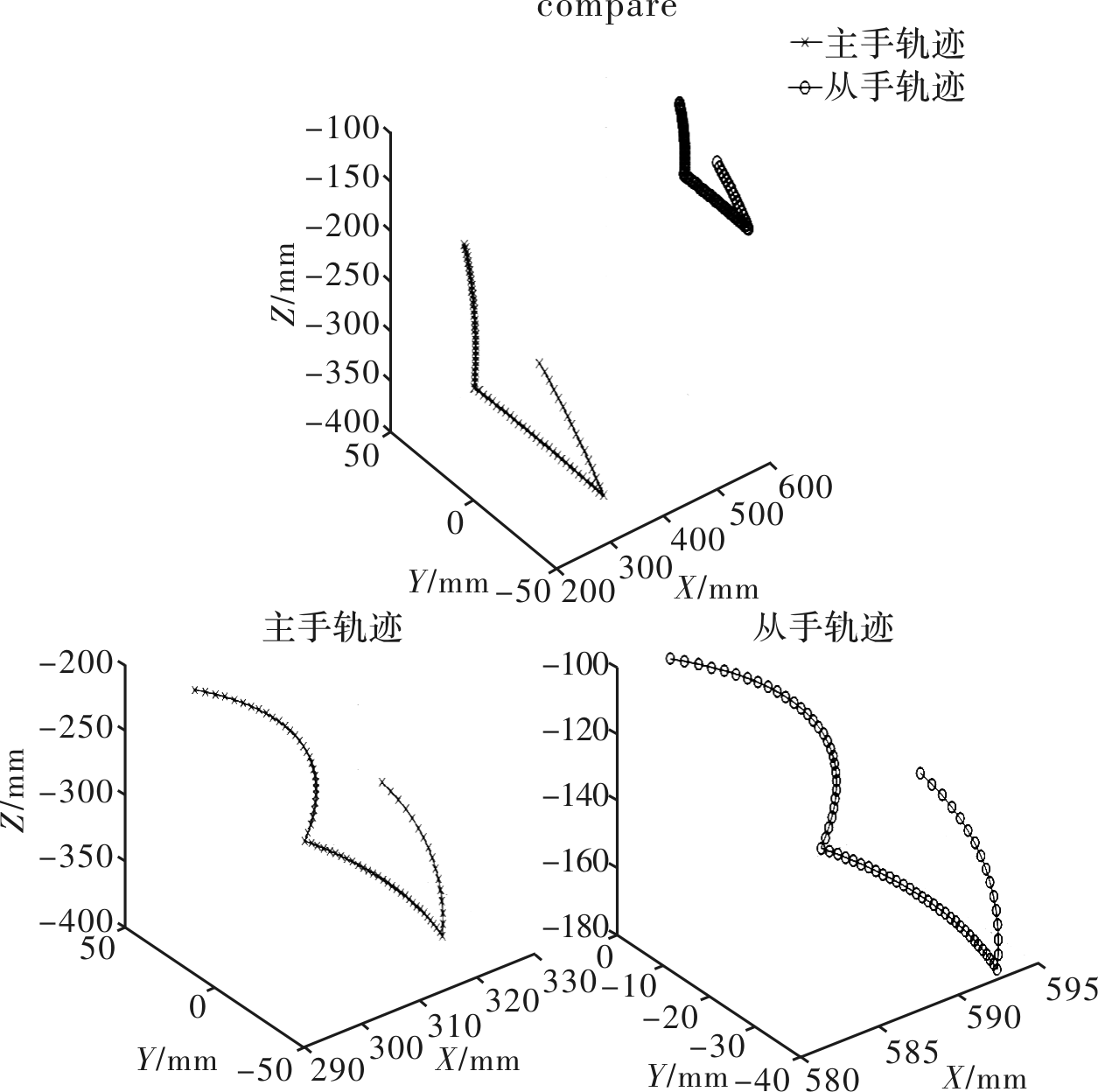
Comparison of the motion trail based on 0.5 times"
| [1] | 张伟 . 达芬奇机器人手术系统——原理、系统组成及应用[J]. 中国医疗器械信息, 2015,21(3):24-25. |
| Zhang Wei . Da vinic rototic surgical system--principle, composition and application of system[J]. China Medical Device Information, 2015,21(3):24-25. | |
| [2] |
Feng Mei, Fu Yili, Pan Bo , et al. Development of a medical robot system for minimally invasive surgery[J]. International Journal of Medical Robotics and Computer Assisted Surgery, 2012,8(1):85-96.
doi: 10.1002/rcs.440 pmid: 21990214 |
| [3] | 王国民 . 外科机器人技术引领未来手术[J]. 复旦学报:医学版, 2013,40(6):631-634. |
| Wang Guomin . Robotic surgeical technology leads the surgical development in the futher[J]. Fudan University Journal of Medical Sciences, 2013,40(6):631-634. | |
| [4] | Farah E, Liu S G . Surgical robot design development[J]. Applied Mechanics and Materials, 2013(415):14-17. |
| [5] | 董光友 . 腹腔微创手术机器人机械臂的设计及研究[D]. 长春:吉林大学, 2016. |
| Dong Guangyou . The design and research of the robot arm for celiac minimally invasive surgery[D]. Changchun:Jilin University, 2016. | |
| [6] |
王树新, 刘玉亮, 李进华 , 等. 腹腔微创手术机器人远程控制平台开发及实验[J]. 天津大学学报:自然科学与工程技术版, 2015,48(12):1041-1049.
doi: 10.11784/tdxbz201409075 |
|
Wang Shuxin, Liu Yuliang, Li Jinhua , et al. Development and experiment of a tele-operated platform for minimally invasive laparoscopic surgery based on microhand robot[J]. Journal of Tianjin University:Science and Technology, 2015,48(12):1041-1049.
doi: 10.11784/tdxbz201409075 |
|
| [7] | 李宪华, 张雷刚, 郭帅 , 等. 一种开放式机械臂3D虚拟仿真平台快速构建方法[J].机械科学与技术,2018(4):53-58. |
| Li Xianhua, Zhang Leigang, Guo Shuai , et al. A Quick Method of Constructing Open and 3D Manipulator Virtual Simulation Platform[J].Mechanical Science and Technology for Aerospace Engineering,2018(4):53-58. | |
| [8] |
李连中, 翟敬梅, 何海洋 . 机器人虚拟仿真及远程控制系统的研究及实现[J]. 计算机工程与应用, 2016,52(13):238-242.
doi: 10.3778/j.issn.1002-8331.1409-0150 |
|
Li Lianzhong, Zhai Jingmei, He Haiyang . Research and implementation about robot virtual simulation and remote control system[J]. Computer Engineering and Applications, 2016,52(13):238-242.
doi: 10.3778/j.issn.1002-8331.1409-0150 |
|
| [9] |
朱峰, 刁燕, 吴应东 . 基于LabVIEW和SolidWorks的微创手术机器人运动仿真[J].机械设计与制造,2013(3):136-138.
doi: 10.3969/j.issn.1001-3997.2013.03.042 |
|
Zhu Feng, Diao Yan, Wu Yingdong . Minimally invasive surgical robot motion simulation based on LabVIEW and SolidWorks[J].Machinery Design&Manufacture, 2013(3):136-138.
doi: 10.3969/j.issn.1001-3997.2013.03.042 |
|
| [10] | 陈福彬, 柴海莉, 高晶敏 . 基于LabVIEW的自动化测试平台的设计[J]. 国外电子测量技术, 2012,31(11):9-14. |
| hen Fubin, Chai Haili, Gao Jingmin . Design of the automatic testing platform based on LabVIEW[J]. Foreign Electronic Measurement Technology, 2012,31(11):9-14. | |
| [11] |
姚丽, 刘东东 . 基于LabVIEW的数据采集与信号处理系统设计[J]. 电子科技, 2012,25(5):79-81.
doi: 10.3969/j.issn.1004-373X.2011.14.052 |
|
Yao Li, Liu Dongdong . Design of the data acquisition and signal processing system based on LabVIEW[J]. Electronic Science and Technology, 2012,25(5):79-81.
doi: 10.3969/j.issn.1004-373X.2011.14.052 |
|
| [12] |
Punak S, Kurenov S . A simple master-slave control mapping setup to learn robot-assisted surgery manipulation[J]. Studies in Health Technology and Informatics, 2012,173(5):356-367.
doi: 10.3233/978-1-61499-022-2-356 pmid: 22357017 |
| [13] |
潘博, 付宜利, 冯美 , 等. 腹腔微创手术机器人主从控制技术与实验[J]. 机器人, 2012,34(6):646-651,679.
doi: 10.3724/SP.J.1218.2012.00646 |
|
Pan Bo, Fu Yili, Feng Mei , et al. Mater-slave control technology for abdominal minimally invasive surgery robot and its experiments[J]. Robot, 2012,34(6):646-651,679.
doi: 10.3724/SP.J.1218.2012.00646 |
|
| [14] | 唐奥林 . 面向主从式微创外科手术机器人的遥操作运动控制策略研究[D]. 上海:上海交通大学, 2014. |
| Tang Aolin . Research on the teleoperation motion control strategy for a master-slave minimally invasive surgical robot[D]. Shanghai:Shanghai Jiao Tong University, 2014. | |
| [15] |
张广潮, 王敏 . SolidWorks在机械原理三维仿真动画制作中的应用[J]. 实验室科学, 2017,20(2):69-73.
doi: 10.3969/j.issn.1672-4305.2017.02.020 |
|
Zhang Guangchao, Wang Min . Application of SolidWorks in 3D simulation of mechanical principle[J]. Laboratory Science, 2017,20(2):69-73.
doi: 10.3969/j.issn.1672-4305.2017.02.020 |
|
| [16] | 马如奇 . 微创腹腔外科手术机器人执行系统研制及其控制算法研究[D]. 哈尔滨:哈尔滨工业大学, 2013. |
| Ma Ruqi . Development of the celiac minimally invasive surgery robotic executing system and research on its control algorithm[D]. Harbin:Harbin Institute of Technology, 2013. |
| [1] | ZHOU Kaihe,XU Xiaozhong,FANG Yunhui. The Application of Visualization Technology in the Field of Information Communication [J]. , 2017, 30(9): 159-. |
| [2] | DONG Chuangang,LIU Weirong. Application of Visualization Technology in Radar Reconnaissance Signal Processing [J]. , 2015, 28(7): 15-. |
| [3] | FENG Weiwei,QIU Jiong. Application of Ant Colony Algorithm in Fire Evacuation Platform [J]. , 2015, 28(4): 13-. |
| [4] | ZHU Yongnan,FANG Jinglong. Design and Implementation of a Web-based Visualization and Editing Tool for Biological Pathways [J]. , 2015, 28(10): 83-. |
| [5] | ZHOU Zhou,ZHANG Licheng,ZHOU Linying,HAO Ruru. Development of 3D Visualization Software of Bridge Based on OpenGL [J]. , 2014, 27(8): 1-. |
| [6] | DAN Peng,ZHANG Dingbo,WANG Dan,LI Wanshan. Attitude Visualization and Modeling of Three-axis Stabilized Satellite [J]. , 2014, 27(5): 136-. |
