Electronic Science and Technology ›› 2019, Vol. 32 ›› Issue (7): 49-55.doi: 10.16180/j.cnki.issn1007-7820.2019.07.010
Previous Articles Next Articles
XIONG Yucong1,ZHANG Meng1,2,WEI Dazhong1,2
Received:2018-07-17
Online:2019-07-15
Published:2019-08-14
Supported by:CLC Number:
XIONG Yucong,ZHANG Meng,WEI Dazhong. Research Progress on Modeling and Control of Two-wheeled Self-Balancing Vehicle[J].Electronic Science and Technology, 2019, 32(7): 49-55.
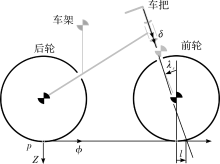
Figure 1.
Carvallo-Whipple model"
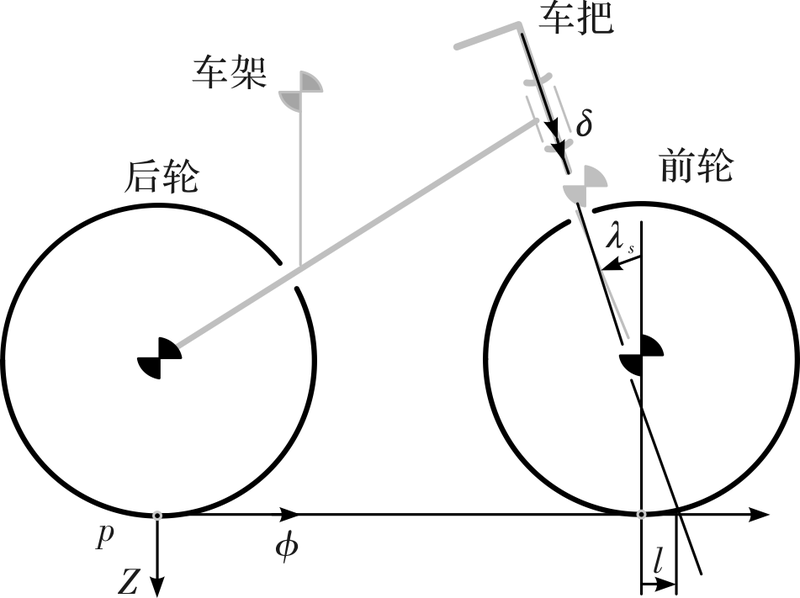
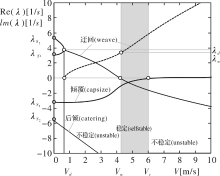
Figure 2.
Characteristic roots of Carvallo-Whipple model"
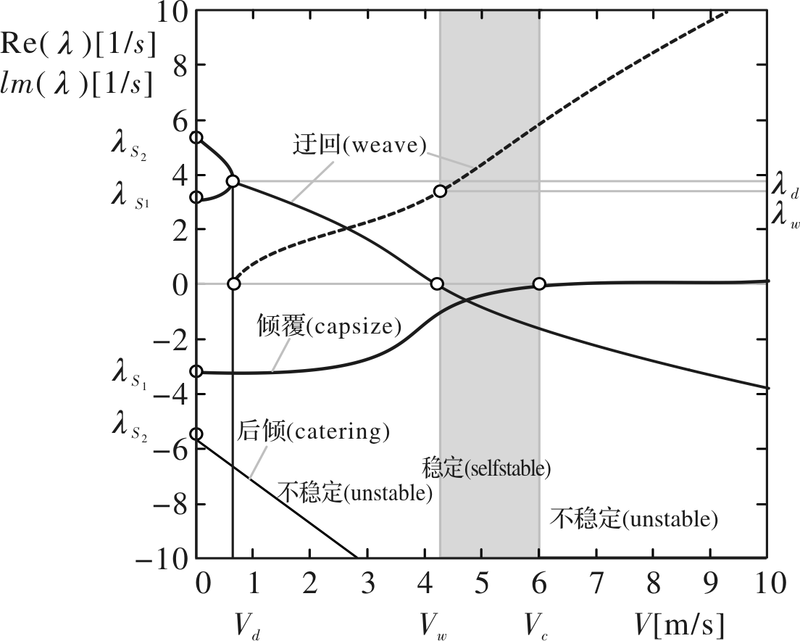

Figure 3.
Mass balancer"
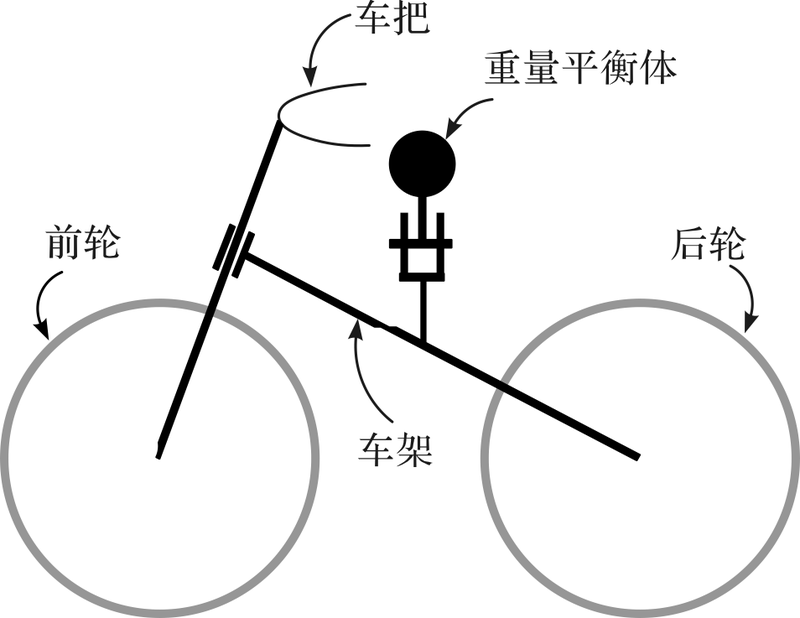
Figure 4.
Steering controller"
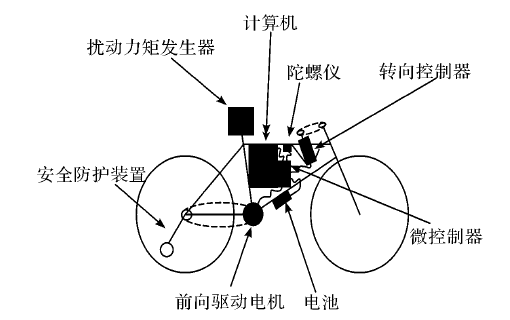
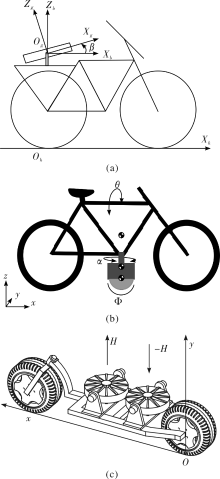
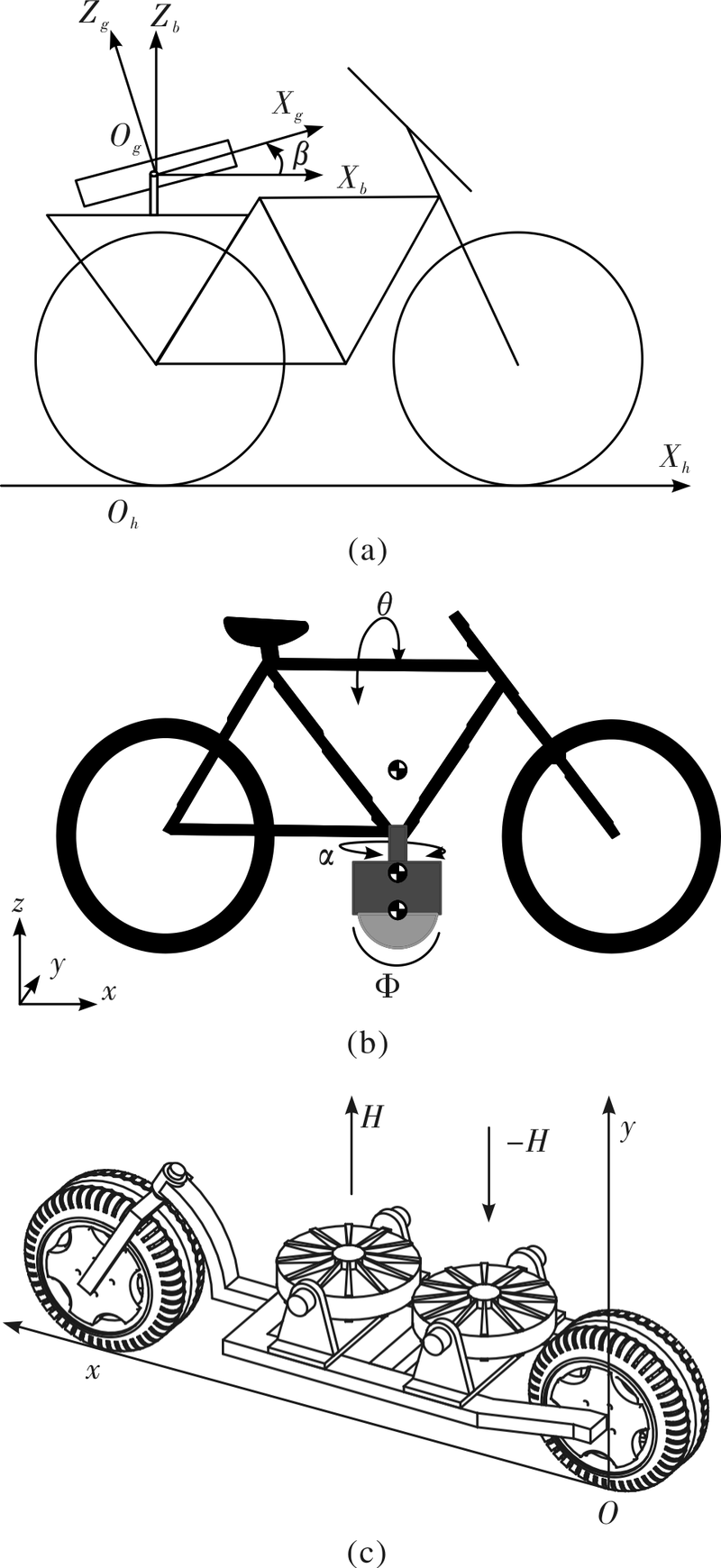
Figure 5.
Installation of control moment gyroscopes (a)Yaw axis installation(b) Elevation axis installation(c)Double gyroscope stabilizers"
| [1] | 黄用华 . 前轮驱动自行车机器人建模与几种平衡运动控制研究[D]. 北京:北京邮电大学, 2011. |
| Huang Yonghua . Research on modeling and several balancing control of front-wheel driven bicycle robot[D]. Beijing:Beijing University of Posts and Telecommunication, 2011. | |
| [2] | Carvallo E . Theorie du movement du monocycle et de la bicyclette[J].Paris:Gauthier-Villars, 1899. |
| [3] | Whipple F J W The stability of the motion of a bicycle[J]. Quart Pure Application Math, 1899(30):312-348. |
| [4] | Klein F, Sommerfeld A . Uber die theorie des kreisels[M]. Leipzig:Teubner, 1910. |
| [5] |
Kooijman J D, Meijaard J P, Papadopoulos J , et al. A bicycle can be self-stable without gyroscopic or caster effects[J]. Science, 2011,332(6027):339-342.
doi: 10.1126/science.1201959 |
| [6] | Meijaard J P, Papadopoulos J, Ruina A, et al. Linearized dynamics equations for the balance and steer of a bicycle: a benchmark and review [C].London:Proceedings Mathematical Physical and Engineering Sciences, 2007. |
| [7] | Kooijman J D, Schwab A L, Meijaard J P . Experimental validation of a model of an uncontrolled bicycle[J]. Multibody System Dynamic, 2008(19):115-132. |
| [8] | Stevens D . The stability and handling characteristics of bicycles[D]. Sydney:The University of New South Wales, 2009. |
| [9] | Schwab A L, Meijaard J P . A review on bicycle dynamics and rider control[J].Vehicle System Dynamics, 2013(51):1059-1090. |
| [10] | Sharp R. S.The stability of motorcycles in acceleration and deceleration [C].London:Braking of Road Vehicles, Institution of Mechanical Engineers Conference, 1977. |
| [11] | Limebeer D J N, Sharp R S, Evangelou S . The stability of motorcycles under acceleration and braking[J]. ARCHIVE Proceedings of the Institution of Mechanical Engineers Part C Journal of Mechanical Engineering Science 1989-1996 (vols 203-210), 2001,215(9):1095-1109. |
| [12] | Meijaard J P, Schwab A L. Linearized equations for an extended bicycle model [C].Lisbon:The 3 rd European Conference on Computational Mechanics Solids, Structures and Coupled Problems in Engineering , 2006. |
| [13] | Limebeer D J N, Sharma A. The dynamics of the accelerating bicycle [C].Malta:The 3rd International Symposium on Communications,Control and Signal Processing , 2008. |
| [14] | Sharma A . Stability analysis of bicycles and motorcycles[D]. London:Imperial College London, 2010. |
| [15] | Limebeer D J N, Sharma A . Burst oscillations in the accelerating bicycle[J]. Application Mechanics, 2010,77(6):3214-3220. |
| [16] | Sharp R S . The stability and control of motorcycles[J]. Journal of Mechanical Engineering Science, 1971,13(13):316-329. |
| [17] | Pacejka H B . Tire and vehicle dynamics[M]. London: Butterworths, 2012. |
| [18] | Roland R D, Lynch J P . Bicycle dynamics, tire characteristics and rider modeling[R]. Buffalo:Cornell Aeronautical Laboratory, 1972. |
| [19] | Sar H, Reński A, Pokorski J . Investigation of the tyre characteristics under non-steady-state conditions on the basis of road tests[J]. Proceedings of the Institution of Mechanical Engineers Part D Journal of Automobile Engineering, 2016,231(1):67-70. |
| [20] | Okawa A, Keo L, Yamakita M. Realization of acrobatic turn via wheelie for a bicycle with a balancer [C].Kobe: IEEE International Conference on Robotics and Automation, 2009. |
| [21] | Yamakita M, Utano A. Automatic control of bicycles with a balancer [C].California:Proceedings of the 2005 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, 2005. |
| [22] | Yamakita M, Utano A, Sekiguchi B. Experimental study of automatic control of bicycle with balancer [C].Beijing: Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2006. |
| [23] | Yamakita M, Keo L. Trajectory control for an autonomous bicycle with balancer [C].Xi’an:IEEE/ASME International Conference on Advanced Intelligent Mechatronics, 2008. |
| [24] | Rodriguez-Rosa D et al. Improving energy efficiency of an autonomous bicycle with adaptive controller design[J]. Sustainability, 2017,9(6):866. |
| [25] | 赵明国, 余永超 . 一种无人驾驶自行车轨迹跟踪控制的方法:中国,CN201510690834.4[P]. 2016 -02-10. |
| Zhao Mingguo, Yu Yongchao. .A method for track tracking control of an unmanned bicycle:China,CN201510690834.4[P] .2016-02-10. | |
| [26] | Guo Lei, Liao Qizheng, Wei Shimin. Nonlinear stabilization of bicycle robot steering control system [C].Changchun:IEEE International Conference on Mechatronics and Automation, 2009. |
| [27] | Nenner U, Linker R, Gutman P . Robust feedback stabilization of an unmanned motorcycle[J]. [C].ntrol Engineering Practice, 2010,18(8):970-978. |
| [28] | He Jiarui, Zhao Mingguo, Stasinopoulos Sotirios. Constant-velocity steering control design for unmanned bicycles [C].Zhuhai:IEEE International Conference on Robotics and Biomimetics, 2015. |
| [29] | Chu T .D,Chen C.K . Modelling and model predictive control for a bicycle-rider system[J]. Vehicle System Dynamics, 2018,56(1):128-149. |
| [30] | 张激扬, 周大宁, 高亚楠 . 控制力矩陀螺框架控制方法及框架转速测量方法[J]. 空间控制技术与应用, 2008,34(2):23-28. |
| Zhang Jiyang, Zhou Daning, Gao Yanan . Ginbal control technique and ginbal rate measurement method for the control moment gyro[J]. Aerospace Control and Application, 2008,34(2):23-28. | |
| [31] | 张强, 张激扬, 高岩 . 基于力矩输出原理的控制力矩陀螺装配工艺方法研究[J].航天制造技术, 2016(3):38-41. |
| Zhang Qiang, Zhang Jiyang, Gao Yan . Research on the assembly process method of control moment gyro based on torque output principle[J].Aerospace Manufacturing Technology, 2016(3):38-41. | |
| [32] | He Jiarui, Zhao Mingguo. Control system design of self-balanced bicycles by control moment gyroscope [C].Yangzhou:Proceedings of the Chinese Intelligent Automation Conference: Intelligent Technology and Systems, 2015. |
| [33] | Yetkin H. Gyroscopic stabilization of an unmanned bicycle [C]. Portland:American Control Conference, 2014. |
| [34] | 丹尼尔·基勇·金, 埃里克·米勒 . 车辆悬架中的陀螺仪系统:中国,CN201380045163.5.[P]. 2015 -04-29 |
| Daniel Kiyong Kim , Eric Miller.Gyro system in vehicle suspension:China,CN201380045163.5[P]. 2013 -08-27. | |
| [35] | Bailey D . Control of a wheeled self-balancing vehicle: Switzerland,WO2017161308 A1[P]. 2017 -09-21. |
| [36] | Spry S C, Girard A R. Gyroscopic stabilization of unstable vehicles: configurations, dynamics and control [C]. California:20 th Symposium of the International Association for Vehicle System Dynamics , 2007. |
| [37] | Ming-Hung Hsieh, Yen-Ting Chen, Cheng-Hung Chi, et al. Fuzzy sliding mode control of a riderless bicycle with a gyroscopic balancer [C].Timisoara: IEEE International Symposium on Robotic and Sensors Environments, 2014. |
| [38] | Chi Cheng-Hung, Chou Jui-Jen. Riderless bicycle with gyroscopic balancer controlled by FSMC and AFSMC [C].Brno:The 7 th International Congress on Ultra Modern Telecommunications and Control Systems and Workshops , 2015. |
| [39] | Tamayo-Leon S, Pulido-Guerrero S, Coral-Enriquez H. Self-stabilization of a riderless bicycle with a control moment gyroscope via model-based active disturbance rejection control [C].Colombian:IEEE Colombian Conference on Automatic Control, 2017. |
| [40] | 熊宇聪, 张猛 . 基于反馈线性化的两轮自平衡汽车侧倾动态响应控制[J]. 制造业自动化, 2018,40(7):138-143. |
| Xiong Yucong, Zhang Meng . Lateral transient response control of two-wheeled self-balancing vehicle based on feedback linearization method[J]. Manufacturing Automation, 2018,40(7):138-143. | |
| [41] | 金爱娟, 郑天翔, 纪晨烨 , 等. 基于模糊自适应PID控制的速度调节器设计与仿真[J]. 电子科技, 2018,31(1):29-33. |
| Jin Aijuan, Zheng Tianxiang, Ji Chenye , et al. Design and simulation of speed regulator based on adaptive fuzzy PID control[J]. Electronic Science and Technology, 2018,31(1):29-33. | |
| [42] | 窦艳艳, 钱蕾, 冯金龙 . 基于MATLAB的模糊PID控制系统设计及仿真[J]. 电子科技, 2015,28(2):119-122. |
| Dou Yanyan, Qian Lei, Feng Jinlong . Design and simulation of fuzzy PID control system based on MATLAB[J]. Electronic Science and Technology, 2015,28(2):119-122. |
| [1] | GUO Jie,JIN Hai,SHEN Xinge. Optimization Control of Quadrotor UAVs Based on Neural Network PID Algorithm [J]. Electronic Science and Technology, 2021, 34(10): 51-55. |
| [2] | WANG Jiaren,WANG Yagang. Research on Complex Control Algorithms for Non-Minimum Phase Systems [J]. Electronic Science and Technology, 2021, 34(1): 55-59. |
| [3] | ZHANG Fan,LIU Jin,YANG Haima. Research on Adaptive Energy Saving Algorithm of Pump Based on Automatic Feedback System [J]. Electronic Science and Technology, 2019, 32(7): 38-42. |
