Electronic Science and Technology ›› 2021, Vol. 34 ›› Issue (10): 51-55.doi: 10.16180/j.cnki.issn1007-7820.2021.10.008
Previous Articles Next Articles
GUO Jie,JIN Hai,SHEN Xinge
Received:2020-06-30
Online:2021-10-15
Published:2021-10-18
Supported by:CLC Number:
GUO Jie,JIN Hai,SHEN Xinge. Optimization Control of Quadrotor UAVs Based on Neural Network PID Algorithm[J].Electronic Science and Technology, 2021, 34(10): 51-55.

Figure 1.
Quadrotor UAVs smodel"
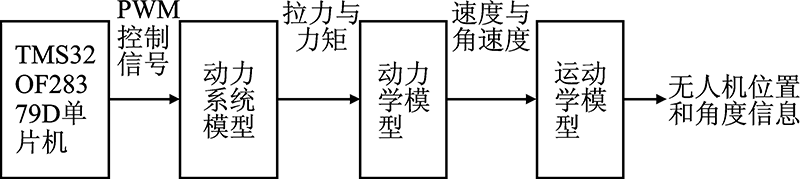
Table 1
Parameters of supporting motor and propeller"
| 螺旋桨直径× 螺距/m | 电池电压 /V | 电流/A | 油门量 /% | 拉力/kg | 功率/W |
|---|---|---|---|---|---|
| 0.127 0× 0.114 3 | 12.6 | 1.59 | 29 | 0.10 | 20 |
| 4.04 | 50 | 0.20 | 51 | ||
| 7.10 | 66 | 0.30 | 89 | ||
| 10.20 | 79 | 0.40 | 129 | ||
| 13.76 | 91 | 0.50 | 173 | ||
| 18.76 | 100 | 0.63 | 236 |

Figure 2.
Structure diagram of neural network PID"
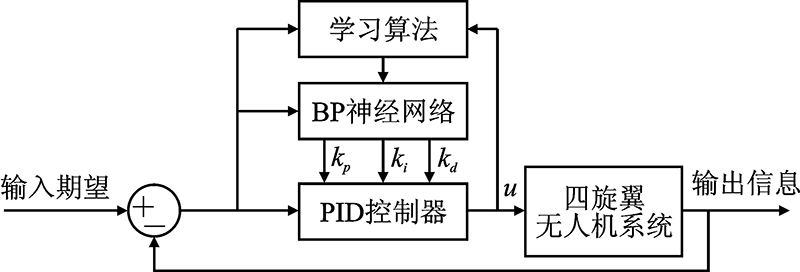
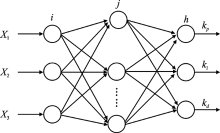
Figure 3.
Neural network structure diagram"
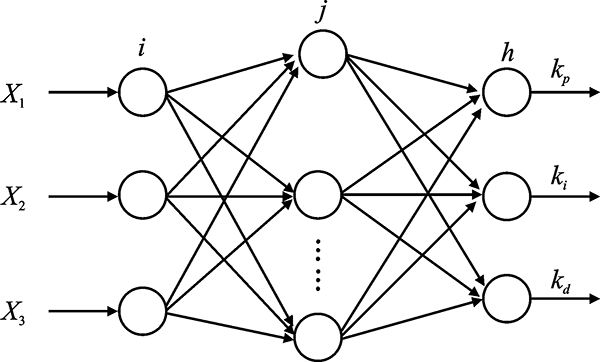
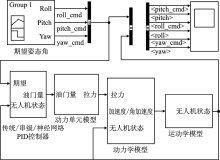
Figure 4.
Quadrotor UAVs simulation"
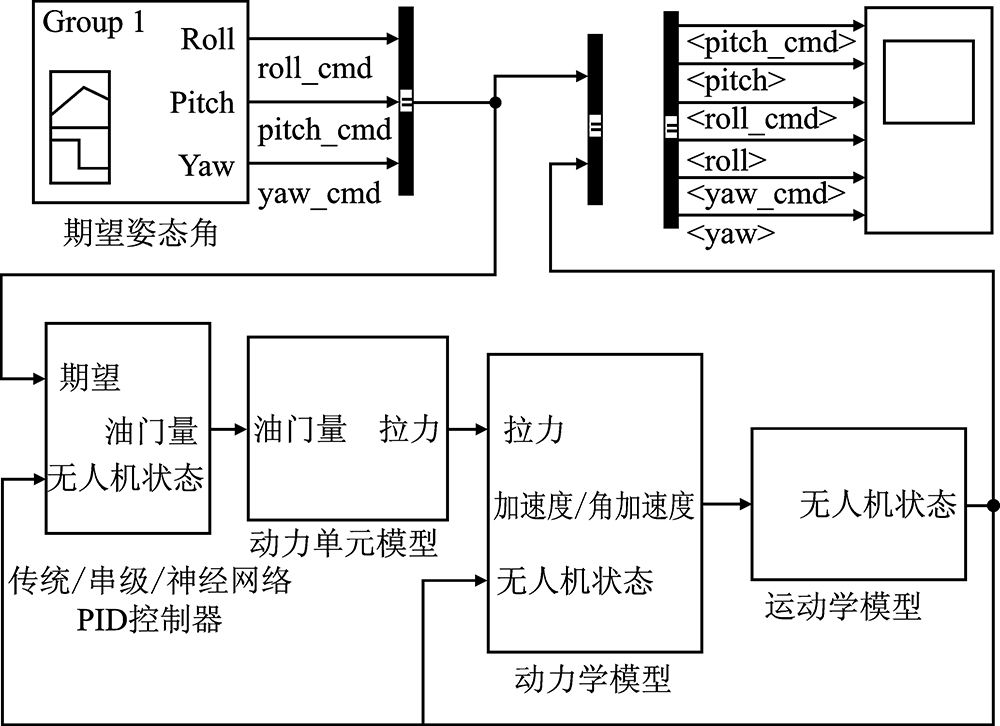
Table 2
Parameters of UAV matihematical simulation model"
| 参数名 | 符号 | 数值 | 单位 |
|---|---|---|---|
| 无人机总质量 | m | 1.5 | kg |
| 无人机轴距 | L | 0.25 | m |
| 杭州重力加速度 | g | 9.793 6 | m·s-2 |
| 绕x轴的转动惯量 | Ix | 5.813×10-3 | kg·m2 |
| 绕y轴的转动惯量 | Iy | 5.813×10-3 | kg·m2 |
| 绕z轴的转动惯量 | Iz | 1.108×10-2 | kg·m2 |
| 机身阻力系数 | K | 2.336×10-2 | N·(m·s-1)-2 |
Figure 5.
PID parameter tuning results"
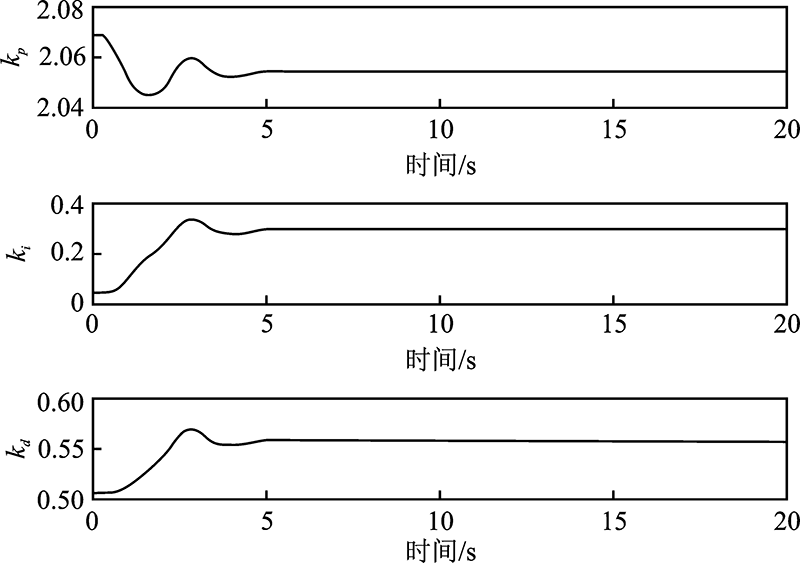
Table 3
PID Parameters of UAVs simulation"
| PITCH环PID参数 | P参数 | I参数 | D参数 |
|---|---|---|---|
| 经典PID | 2.00 | 0.40 | 0.70 |
| 串级PID内环 | 1.00 | 0.20 | 0.20 |
| 串级PID外环 | 1.50 | 0.50 | 0.30 |
| 神经网络PID | 2.05 | 0.30 | 0.55 |
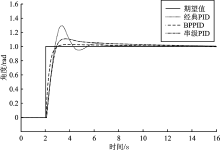
Figure 6.
Angle tracking curve with different PID control methods"
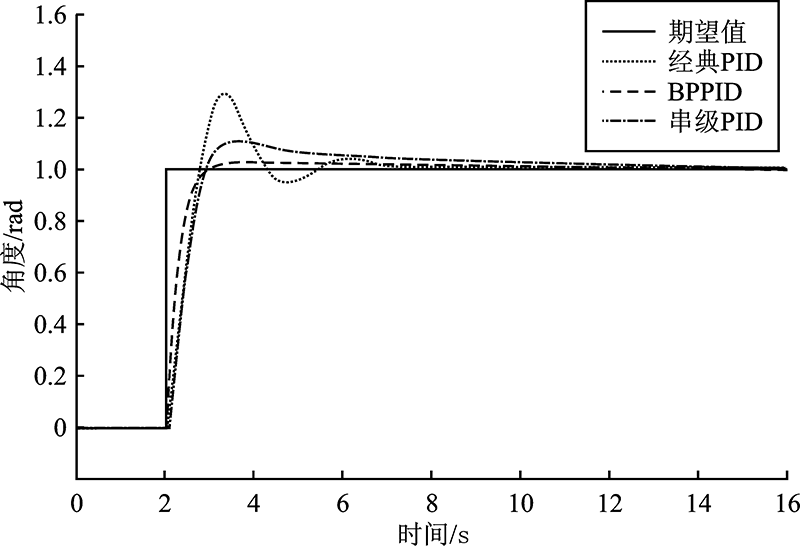
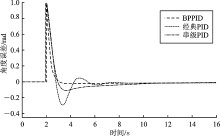
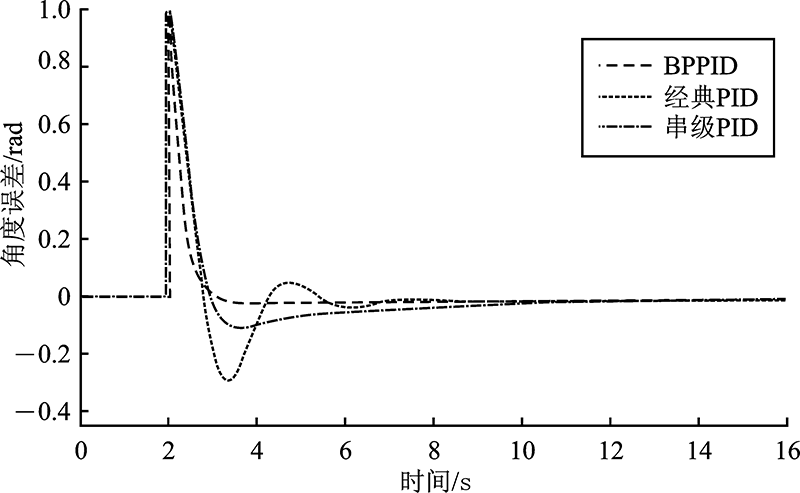
Figure 7.
Error curves of different PID control methods"
| [1] | 杨则允, 李猛, 孙钦鹏. 四旋翼无人机控制系统仿真设计[J]. 计算机测量与控制, 2019, 27(4):68-71. |
| Yang Zeyun, Li Meng, Sun Qinpeng. Simulation design of quad-rotor UAV control system[J]. Computer Measurement & Control, 2019, 27(4):68-71. | |
| [2] | 梅武军, 伍家成, 杨扬戬, 等. 一种小型无人机自主飞控系统设计与实现[J]. 电子科技, 2017, 30(7):106-109. |
| Mei Wujun, Wu Jiacheng, Yang Yangjian, et al. A small unmanned aerial vehicle autonomous fight control system design[J]. Electronic Science and Technology, 2017, 30(7):106-109. | |
| [3] | 冯培晏. 四旋翼无人机建模与PID控制器设计[J]. 工业设计, 2018(6):135-137. |
| Feng Peiyan. Quadrotor UAV modeling and PID controller design[J].Industrial Design, 2018(6):135-137. | |
| [4] | 梅武军. 基于ROS的多旋翼飞行器飞行控制系统的开发与设计[J]. 电子科技, 2017, 30(10):23-25. |
| Mei Wujun. Development and design of flight control system for multi rotor vehicle based on ROS[J]. Electronic Science and Technology, 2017, 30(10):23-25. | |
| [5] | 郑健. 基于无模型自适应控制方法的四旋翼飞行器姿态调整[D]. 北京:北京交通大学, 2015. |
| Zheng Jian. Quad-rotor aircraft attitude adjustment based on model-free adaptive control[D]. Beijing:Beijing Jiaotong University, 2015. | |
| [6] | 高青, 袁亮, 吴金强. 基于新型LQR的四旋翼无人机姿态控制[J]. 制造业自动化, 2014, 36(10):13-16. |
| Gao Qing, Yuan Liang, Wu Jinqiang. Attitude control of a quadrotor UAV based on new LQR[J]. Manufacturing Automation, 2014, 36(10):13-16. | |
| [7] | 李珺, 王娜, 花玉, 等. 基于干扰观测器的四旋翼飞行器反步控制研究[J]. 计算机仿真, 2020, 37(4):28-33. |
| Li Jun, Wang Na, Hua Yu, et al. Study on disturbance observer-based backstepping control for quadrotor[J]. Computer Simulation, 2020, 37(4):28-33. | |
| [8] | 张志赟, 谢习华. 四旋翼无人机模型参考自适应滑模控制[J]. 制造业自动化, 2020, 42(2):9-15. |
| Zhang Zhiyun, Xie Xihua. Model reference adaptive sliding mode control for quadrotor UVA[J]. Manufacturing Automation, 2020, 42(2):9-15. | |
| [9] | 全权. 多旋翼飞行器设计与控制[M]. 北京: 电子工业出版社, 2018. |
| Quan Quan. Multi-rotor aircraft design and control[M]. Beijing: Publishing House of Electronics Industry, 2018. | |
| [10] | 徐大远, 王英健, 陈冠军, 等. 四轴飞行器的动力学建模和位置控制研究[J]. 电子科技, 2015, 28(1):69-72. |
| Xu Dayuan, Wang Yingjian, Chen Guanjun, et al. Research on dynamic modeling and position control of the quadcopter[J]. Electronic Science and Technology, 2015, 28(1):69-72. | |
| [11] | Wu X W, Xiao B, Qu Y H. Modeling and sliding mode-based attitude tracking control of a quadrotor UAV with time-varying mass[J]. ISA Transactions, 2019(7):266-279. |
| [12] | 方璇, 钟伯成. 基于人工鱼群PID控制算法的四旋翼飞行器控制[J]. 电子科技, 2015, 28(12):52-55. |
| Fang Xuan, Zhong Bocheng. Four-rotor unmanned aerial vehicles control system based on PID controller of artificial fish swarm algorithm[J]. Electronic Science and Technology, 2015, 28(12):52-55. | |
| [13] | 徐会丽. 多旋翼无人机飞行控制算法研究[D]. 重庆:中国科学院大学, 2017. |
| Xu Huili. Research on flight control algorithm of multi-rotor UAV[D]. Chongqing:University of Chinese Academy of Sciences, 2017. | |
| [14] | 温浩, 赵国庆. 基于MATLAB神经网络工具箱的线性神经网络实现[J]. 电子科技, 2005, 18(1):26-29. |
| Wen Hao, Zhao Guoqing. Realization of the linear network based on the neural network tool kit in MATLAB[J]. Electronic Science and Technology, 2005, 18(1):26-29. | |
| [15] | Paiva E, Llano M, Rodas J, et al. Design and implementati- on of a VTOL flight transition mechanism and development of a mathematical model for a tilt rotor UAV [C].Concepción:IEEE International Conference on Automation, 2018. |
| [16] | 张硕, 张学典, 秦敏, 等. 基于Backstepping模糊自适应的四旋翼飞行器控制[J]. 电子科技, 2017, 30(2):54-57. |
| Zhang Shuo, Zhang Xuedian, Qin Min, et al. Adaptive fuzzy backstepping control of quadrotors[J]. Electronic Science and Technology, 2017, 30(2):54-57. | |
| [17] | 熊中刚, 刘忠, 王寒迎, 等. RBF神经网络增量式PID自动转向控制系统设计[J]. 农机化研究, 2021, 43(4):27-32. |
| Xiong Zhonggang, Liu Zhong, Wang Hanying, et al. Design of automatic steering control system based on RBF neural network incremental PID[J]. Journal of Agricultural Mechanization Research, 2021, 43(4):27-32. | |
| [18] | 黄旋, 陈光明, 赵潮. 基于STM32和μC/OS-Ⅲ的服务机器人设计与实现[J]. 机器人技术与应用, 2020(1):39-43. |
| Huang Xuan, Chen Guangming, Zhao Chao. A service robot design based on the STM32 and μC/OS-Ⅲ[J]. Robot Technique and Application, 2020(1):39-43. |
| [1] | LIU Jianlong,HAO Zhenghang. Comparative Study of Wind Power System Simulation Based on Back-to-Back Converters [J]. Electronic Science and Technology, 2022, 35(2): 67-73. |
| [2] | LI Gang. A Synthesis Method for Dual-Band Filters with Frequency Variant Couplings [J]. Electronic Science and Technology, 2022, 35(1): 1-5. |
| [3] | YUAN Xianpu,MIAO Xiaodan,YANG Jian,YUAN Tianchen,YUAN Ding. Aerodynamic Noise Analysis for High-Speed Train’s Pantograph and Study on Noise Reduction of the Cavity of Pantograph [J]. Electronic Science and Technology, 2022, 35(1): 45-52. |
| [4] | CHEN Jiaming,WANG Lihua,SU Xiaohang. Research on Mechanical Characteristics of Railway Bridge Ballast Bed Based on ADAMS [J]. Electronic Science and Technology, 2022, 35(1): 53-59. |
| [5] | WANG Yumei,ZHANG Zihan,WANG Hao. Large-Disturbance Stability Analysis of DC Microgrid Based on Mixed Potential Function [J]. Electronic Science and Technology, 2022, 35(1): 66-72. |
| [6] | NIU Shuaichen,WANG Fuzhong,HAN Yaofei,HE Guofeng,NIU Yeke. Control Strategy of Modular Multilevel Converter Under Unbalanced Grid Voltage [J]. Electronic Science and Technology, 2022, 35(1): 80-86. |
| [7] | HAN Shifan,FU Dongxiang. Research on Optical Lens Reconstruction Algorithm Based on NURBS [J]. Electronic Science and Technology, 2021, 34(9): 24-29. |
| [8] | WANG Yang,WANG Yagang. Identification Method Based on Step Response and Genetic Algorithm to Optimize Higher-Order Plus Time-Delay Model [J]. Electronic Science and Technology, 2021, 34(9): 41-46. |
| [9] | LI Yudong,LIAN Haishan,HU Xiaodan. AC/AC Frequency Conversion Power Supply Based on Three-Phase Input [J]. Electronic Science and Technology, 2021, 34(9): 47-53. |
| [10] | YAN Zhenbin,ZHENG Bochao,ZHOU Zhiyong. Research on Grid Connection of Photovoltaic Power Generation Systems Based on a New Robust Droop Control Method [J]. Electronic Science and Technology, 2021, 34(8): 79-86. |
| [11] | TANG Shengnan,LÜ Yibin,WANG Yingzi,FANG Jinli,WU Dean. Hybrid Iteration Method for Number Conformal Mapping of Multi-Connected Domain [J]. Electronic Science and Technology, 2021, 34(7): 13-18. |
| [12] | ZHANG Fei,LIN Mao,MAO Hongkai,SU Fangwen,SUI Jinchi. An AlGaN/GaN High-Electron Mobility Transistor with N-Buried Layer [J]. Electronic Science and Technology, 2021, 34(5): 61-65. |
| [13] | HE Yue,ZHANG Jianhua,CHEN Yan,HAN Chunyong,SHI Yunlei,SHAO E. Study on Radiation Response Characteristics of Internal Cables of Frequency Equipment [J]. Electronic Science and Technology, 2021, 34(3): 18-21. |
| [14] | WU Fengyan,LIU Gequn,TAO Feng,GU Dongqing,LIU Xiaokun,ZHANG Wei. Influences of Historical Rate of Interest on the Evolutionary Joint Production Game in Complex Networks [J]. Electronic Science and Technology, 2021, 34(3): 22-27. |
| [15] | HE Qiang,YANG Qinghui,ZHANG Huaiwu. A Control Method of Power up Bias Sequence of Radio Frequency Amplifier [J]. Electronic Science and Technology, 2021, 34(2): 1-6. |
