Electronic Science and Technology ›› 2020, Vol. 33 ›› Issue (4): 42-49.doi: 10.16180/j.cnki.issn1007-7820.2020.04.008
Previous Articles Next Articles
ZHANG Daoyi,SAN Hongjun,CHEN Jiupeng,LI Pengfei,XIONG Binzhou
Received:2019-02-21
Online:2020-04-15
Published:2020-04-23
Supported by:CLC Number:
ZHANG Daoyi,SAN Hongjun,CHEN Jiupeng,LI Pengfei,XIONG Binzhou. Velocity Kinematics Analysis and Simulation of 5-DOF Hybrid Engraving Machine[J].Electronic Science and Technology, 2020, 33(4): 42-49.
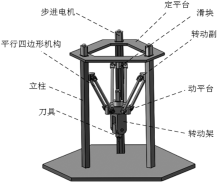
Figure 1.
Three-dimensional model of hybrid robot"
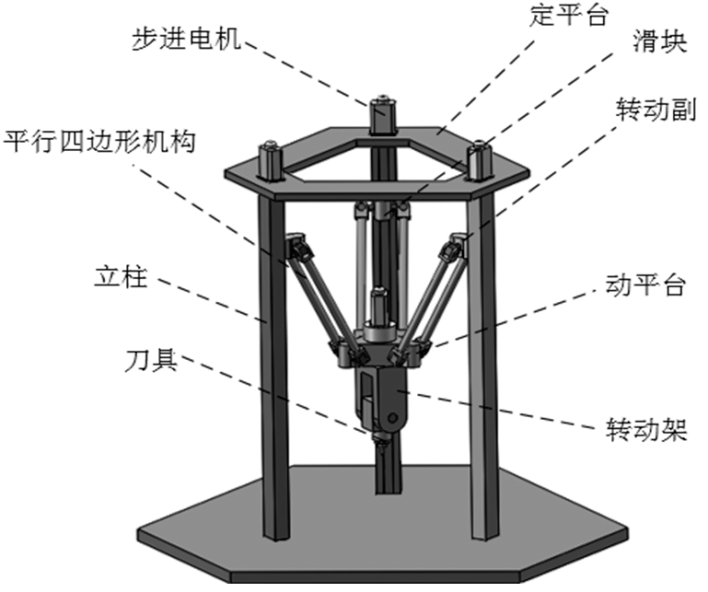
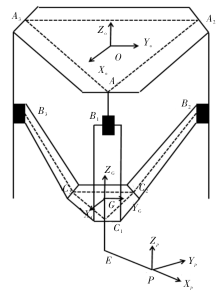
Figure 2.
Robot structure sketch"
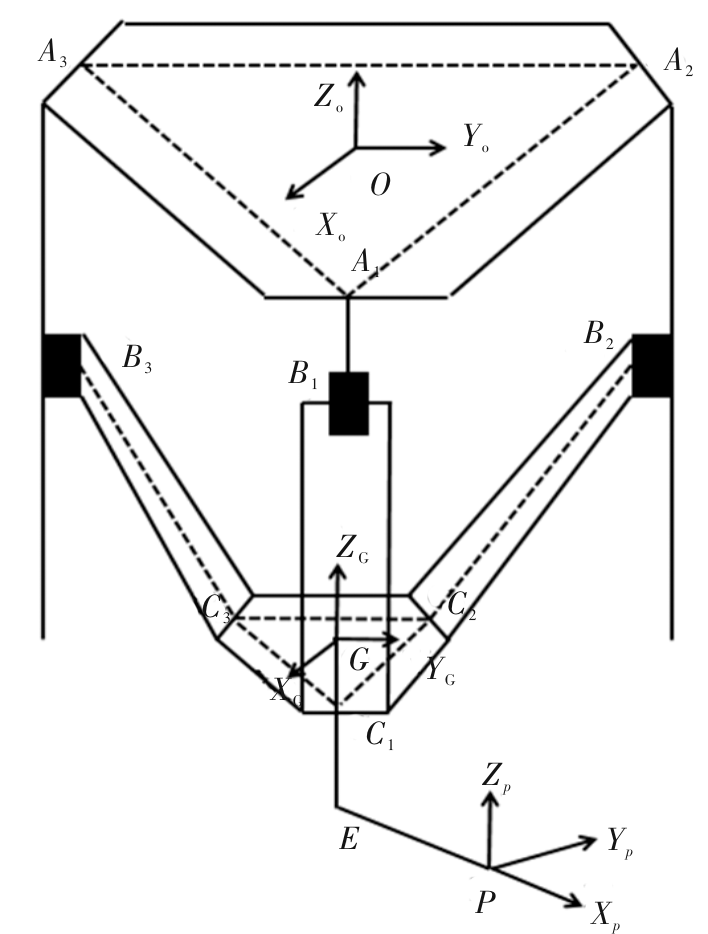
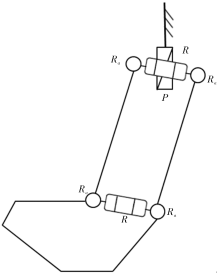
Figure 3.
Sketch of the branched chains"

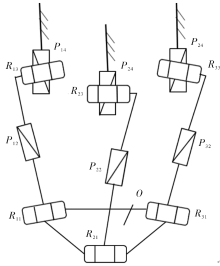
Figure 4.
Sketch of the parallel part"
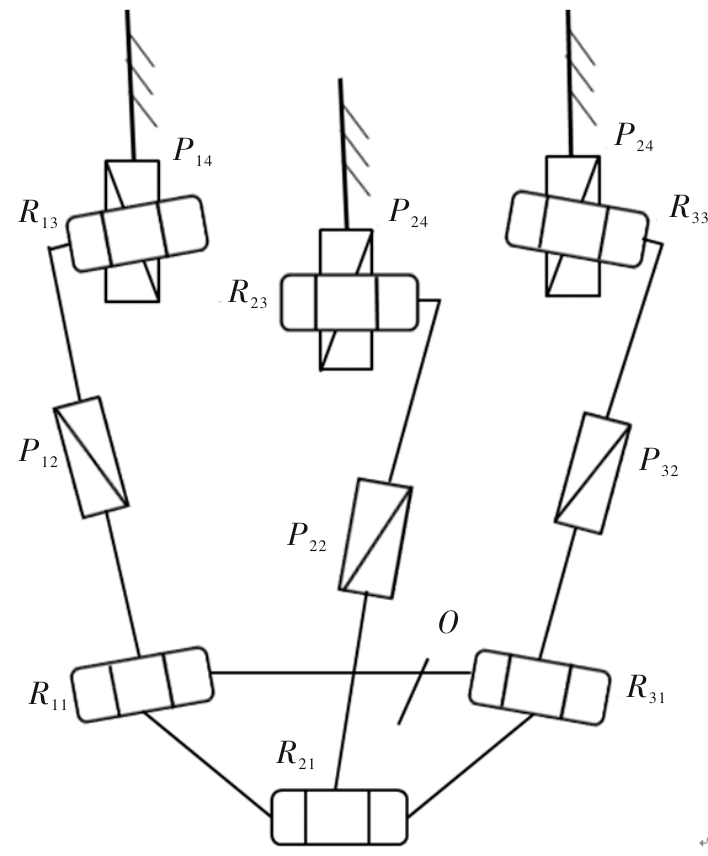
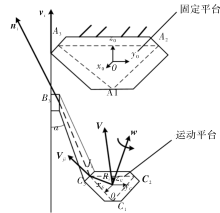
Figure 5.
Speed mapping of mechanism"
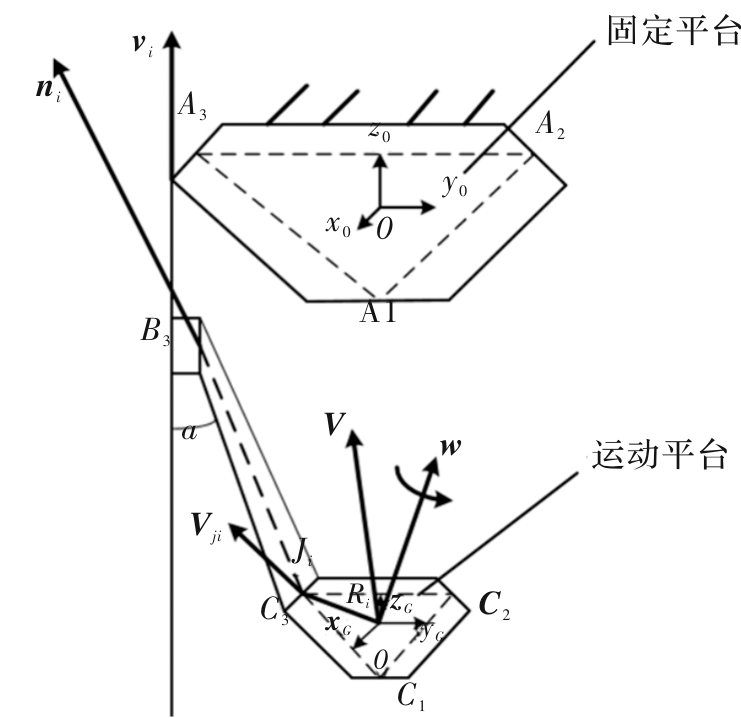

Figure 6.
Velocity analysis diagram of carving machine"
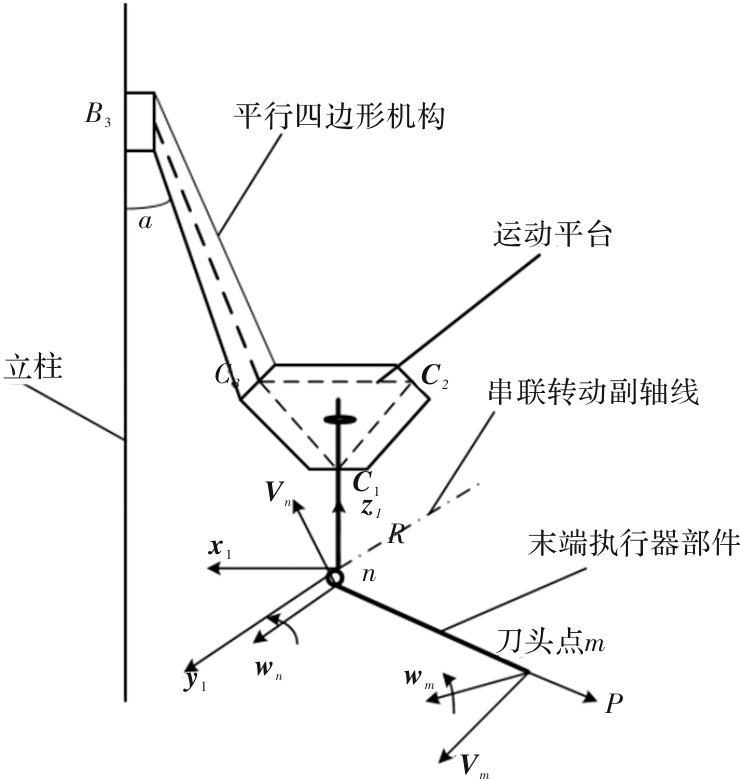
Figure 7.
Terminal velocity curves"
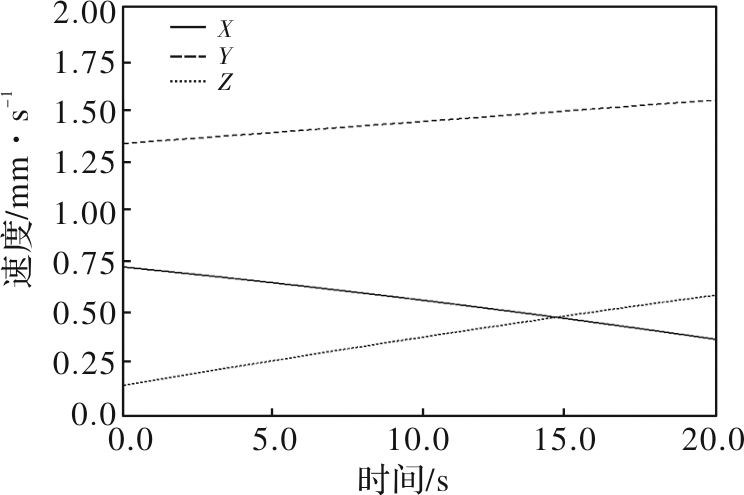
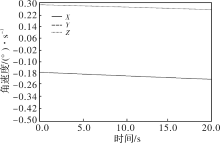
Figure 8.
Terminal angular velocity curves"
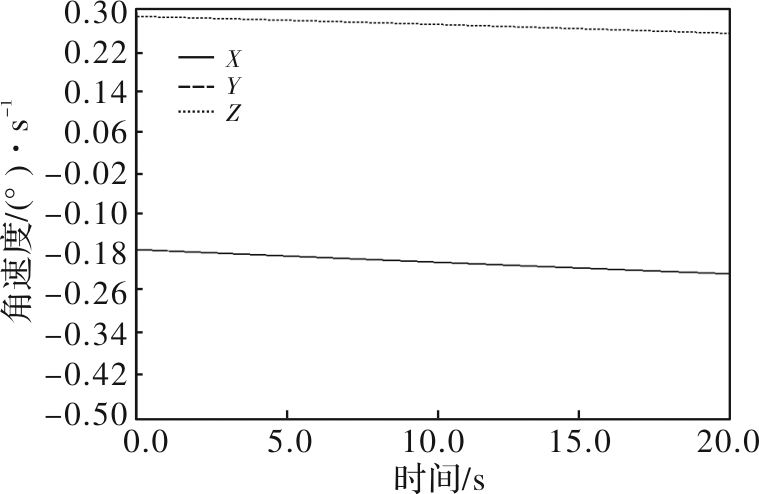
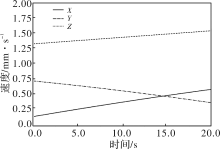
Figure 9.
Terminal velocity curves"
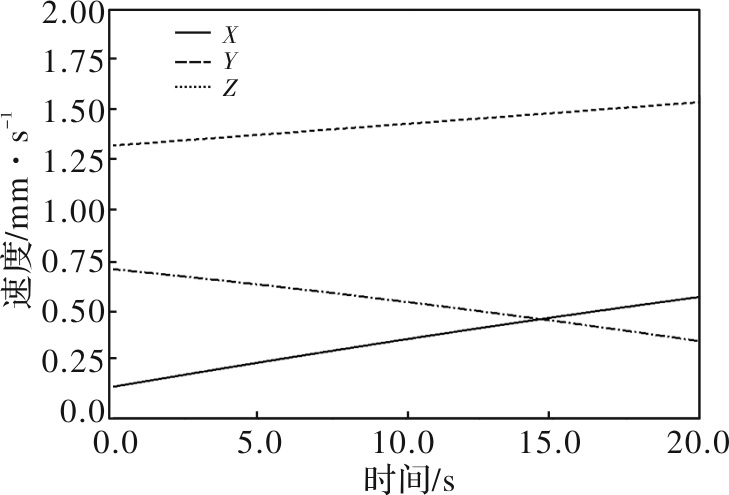

Figure 10.
Terminal angular velocity curves"
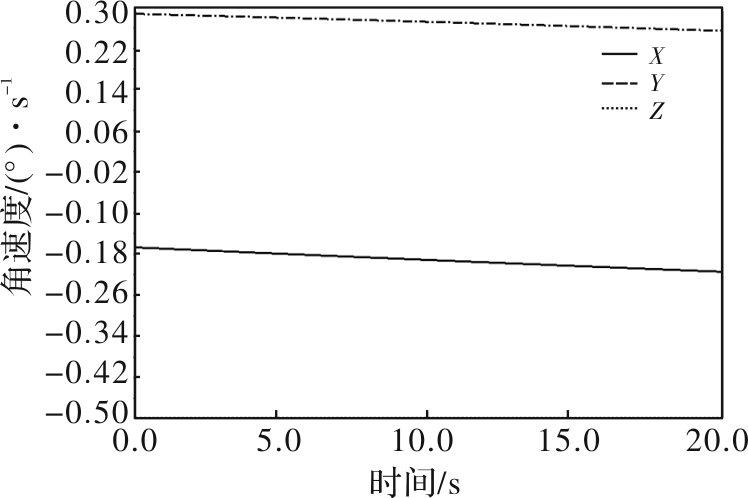
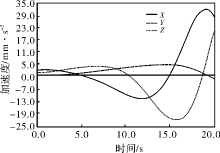
Figure 11.
Terminal acceleration curves"

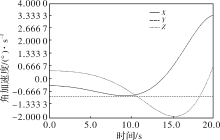
Figure 12.
Terminal angular acceleration curves"
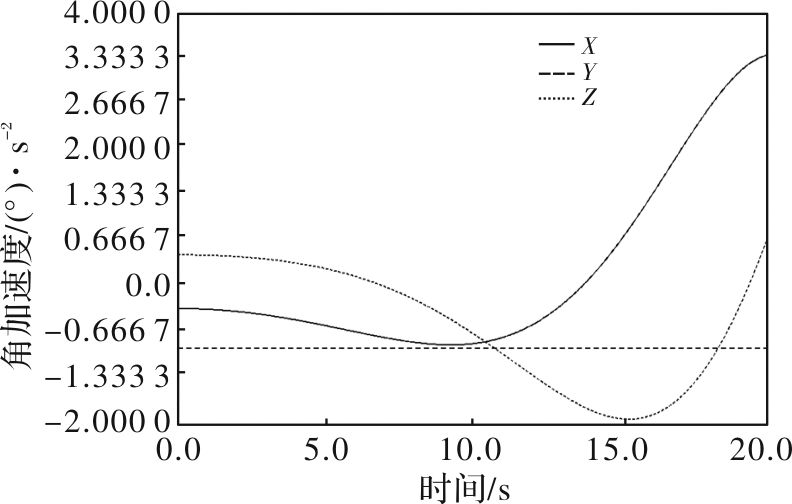
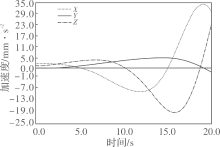
Figure 13.
Terminal acceleration curves"
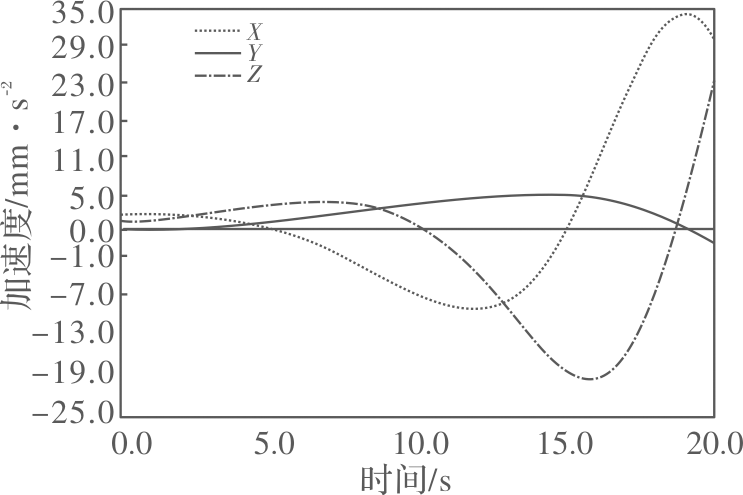
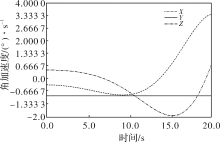
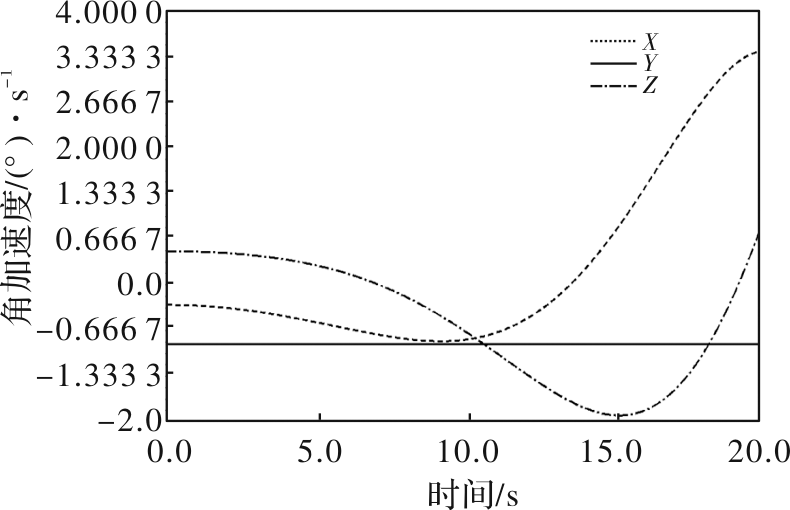
Figure 14.
Terminal angular acceleration curves"
| [1] | 鹿玲, 张东胜, 许允斗 , 等. 五自由度混联机器人尺度与结构优化设计[J]. 农业机械学报, 2018,49(4):412-419. |
| Lu Ling, Zhang Dongsheng, Xu Yundou , et al. Dimension and structure optimization design of 5-DOF hybrid manipulator[J]. Journal of Agricultural Machinery, 2018,49(4):412-419. | |
| [2] | 王冰, 方跃法 . 基于球面五杆机构的变胞并联机构构型综合[J]. 机械工程学报, 2018,54(19):361-370. |
| Wang Bing, Fang Yuefa . Type synjournal of metamorphic parallel mechanism with spherical five bar linkage[J]. Journal of Mechanical Engineering, 2018,54(19):361-370. | |
| [3] | 赵铁石, 陈江, 王家春 , 等. 4-UPU并联机器人机构及其运动学[J]. 中国机械工程, 2005,16(22):2034-2037. |
| Zhao Tieshi, Chen Jiang, Wang Jiachun . 4-UPU parallel manipulator mechanism and kinematics[J]. China Machinery Engineering, 2005,16(22):2034-2037. | |
| [4] | 王晓飞, 王进, 樊锐 , 等. 并联机构动平台的六自由度位姿检测机构[J]. 工具技术, 2018,52(11):141-143. |
| Wang Xiaofei, Wang Jin, Fan Rui , et al. Pose detection mechanism based on six degree of freedom parallel mechanism platform[J]. Tool Engineering, 2018,52(11):141-143. | |
| [5] | 郭金伟, 许允斗, 刘文兰 , 等. 冗余驱动过约束并联机构受力分析[J]. 燕山大学学报, 2018,42(3):199-205. |
| Guo Jinwei, Xu Yundou, Liu Wenlan , et al. Force analysis of redundantly actuated overconstrained parallel mechanism[J]. Journal of Yanshan University, 2018,42(3):199-205. | |
| [6] | 刘旭东, 黄田 . 3-TPT型并联机器人工作空间解析与综合[J]. 中国机械工程, 2001(12):151-153. |
| Liu Xudong, Huang Tian . Analysis and comprehensive of workspace of 3-TPT parallel robot[J]. Chinese Journal of Mechanical Engineering, 2001(12):151-153. | |
| [7] | 雷俊松, 伞红军 . 一种混联机器人的运动学及轨迹规划研究[D]. 昆明:昆明理工大学, 2017. |
| Lei Junsong, San Hongjun . A hybrid robot kinematics and trajectory planning research[D]. Kunming:Kunming University of Science and Technology, 2017. | |
| [8] | Liu H, Huang T, Mei J , et al. Kinematic design of a 5-DOF hybrid robot with large workspace limb-stroke ratio[J]. Journal of Mechanical Design, 2007,129(5):530-53. |
| [9] | 吴梦丽, 黄田, 张大卫 , 等. 一种新型可重构装备TriVariant的概念设计[J]. 机械设计, 2004,21(z1):28-30. |
| Wu Mengli, Huang Tian, Zhang Dawei . Conceptual design of a new reconfigurable equipment TriVariant[J]. Journal of Mechanical Design, 2004,21(z1):28-30. | |
| [10] |
Huang T, Mei J P, Zhao X Y , et al. Stiffness estimation of a tripod-based parallel kinematic machine[J]. IEEE International Conference on Robotics and Automation, 2001,4(1):3280-3285.
doi: 10.1115/1.4024286 pmid: 23719922 |
| [11] | Fu J, Gao F, Chen W , et al. Kinematic accuracy research of a novel six-degree-of-freedom parallel robot with three legs[J]. Mechanism and Machine Theory, 2016,102(5):86-102. |
| [12] | 康件丽, 陈国强, 赵俊伟 . 基于符号运算的3-PRS并联机器人速度运动学分析[J]. 机床与液压, 2014,42(21):28-32. |
| Kang Jianli, Chen Guoqiang, Zhao Junwei . Velocity kinematics analysis of 3-PRS parallel robot based on computation[J]. Machine Tool and Hydraulic, 2014,42(21):28-32. | |
| [13] | 武雅杰, 杨晶东 . 基于A*算法的机器人路径规划[J]. 电子科技, 2017,30(6):130-133. |
| Wu Yajie, Yang Jingdong . Robot path planning based on A* algorithms[J]. Electronic Science and Technology, 2017,30(6):130-133. | |
| [14] | 雷俊松, 伞红军, 赵俊杰 , 等. 一种五自由度混联机器人轨迹规划研究[J]. 新技术新工艺, 2017(6):47-50. |
| Lei Junsong, San Hongjun, Zhao Junjie . Trajectory planning of a 5-DOF hybrid robot[J]. New Technology and New Process, 2017(6):47-50. | |
| [15] | 朱呈祥, 沈景凤 . 基于MATLAB和ADAMS 的超速机柔性轴系仿真[J]. 电子科技, 2017,30(4):98-102. |
| Zhu Chengxiang, Shen Jingfeng . Simulation of speed flexible shaft machine based on MATLAB and ADAMS[J]. Electronic Science and Technology, 2017,30(4):98-102. | |
| [16] | 杨廷力 . 机器人机构拓扑结构设计[M]. 北京: 科学出版社, 2012. |
| Yang Tingli. Topological structure design of robot mechanism[M]. Beijing: Science Press, 2012. |
| [1] | LIU Jianlong,HAO Zhenghang. Comparative Study of Wind Power System Simulation Based on Back-to-Back Converters [J]. Electronic Science and Technology, 2022, 35(2): 67-73. |
| [2] | LIU Chenmin,WANG Yagang. Optimization of Firefly Algorithm Based on Continuous Space [J]. Electronic Science and Technology, 2022, 35(2): 40-45. |
| [3] | SU Xiaohang,WANG Lihua,CHEN Jiaming. Research on Fatigue Life of Oil Cylinder System Based on Multi-Body Dynamics and Finite Element [J]. Electronic Science and Technology, 2022, 35(1): 40-44. |
| [4] | CHEN Jiaming,WANG Lihua,SU Xiaohang. Research on Mechanical Characteristics of Railway Bridge Ballast Bed Based on ADAMS [J]. Electronic Science and Technology, 2022, 35(1): 53-59. |
| [5] | NIU Shuaichen,WANG Fuzhong,HAN Yaofei,HE Guofeng,NIU Yeke. Control Strategy of Modular Multilevel Converter Under Unbalanced Grid Voltage [J]. Electronic Science and Technology, 2022, 35(1): 80-86. |
| [6] | WANG Yang,WANG Yagang. Identification Method Based on Step Response and Genetic Algorithm to Optimize Higher-Order Plus Time-Delay Model [J]. Electronic Science and Technology, 2021, 34(9): 41-46. |
| [7] | LI Yudong,LIAN Haishan,HU Xiaodan. AC/AC Frequency Conversion Power Supply Based on Three-Phase Input [J]. Electronic Science and Technology, 2021, 34(9): 47-53. |
| [8] | YAN Zhenbin,ZHENG Bochao,ZHOU Zhiyong. Research on Grid Connection of Photovoltaic Power Generation Systems Based on a New Robust Droop Control Method [J]. Electronic Science and Technology, 2021, 34(8): 79-86. |
| [9] | HE Qiang,YANG Qinghui,ZHANG Huaiwu. A Control Method of Power up Bias Sequence of Radio Frequency Amplifier [J]. Electronic Science and Technology, 2021, 34(2): 1-6. |
| [10] | SUN Huixia,ZHOU Shangnan,ZHOU Ling,DOU Yongmei. Development of Digital Signal Processing Simulation Platform Based on MATLAB GUI [J]. Electronic Science and Technology, 2021, 34(2): 74-78. |
| [11] | JIANG Kaiwen,JIN Hai,XU Shen. Design and Simulation of High Power Factor PMSM without Electrolytic Capacitor [J]. Electronic Science and Technology, 2021, 34(12): 13-18. |
| [12] | HU Qiongqiong,SAN Hongjun,CHEN Jiupeng,XIE Feiya,CHEN Zhongping,LI Pengyu. Motions Analysis and Simulation of a Parallel Robot with Four Degrees of Freedom [J]. Electronic Science and Technology, 2021, 34(11): 46-54. |
| [13] | WANG Jiaren,WANG Yagang. Research on Complex Control Algorithms for Non-Minimum Phase Systems [J]. Electronic Science and Technology, 2021, 34(1): 55-59. |
| [14] | HU Xiaodan,LI Yudong,LIAN Haishan. Plugged AC/AC Frequency Conversion System Supply Based on dSPACE [J]. Electronic Science and Technology, 2020, 33(7): 51-56. |
| [15] | CHEN Jiupeng,SAN Hongjun,ZHANG Daoyi,HU Qiongqiong,ZHANG Kaixiang,XIONG Binzhou. Diagonal Gait Simulation Analysis of a Quadruped Robot [J]. Electronic Science and Technology, 2020, 33(5): 33-38. |
|
