Electronic Science and Technology ›› 2022, Vol. 35 ›› Issue (8): 73-78.doi: 10.16180/j.cnki.issn1007-7820.2022.08.012
ZENG Zhijiang,GAO Guanbin,MA Wenjin
Received:2021-03-08
Online:2022-08-15
Published:2022-08-10
Supported by:CLC Number:
ZENG Zhijiang,GAO Guanbin,MA Wenjin. A Multi-Point Calibration Method of Articulated Arm Coordinate Measuring Machine[J].Electronic Science and Technology, 2022, 35(8): 73-78.

Figure 1.
The articulated arm coordinate measuring machine"

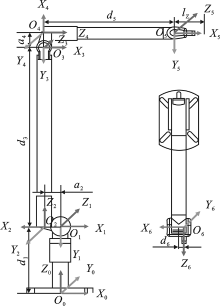
Figure 2.
Coordinate systems of the articulated arm coordinate measuring machine"
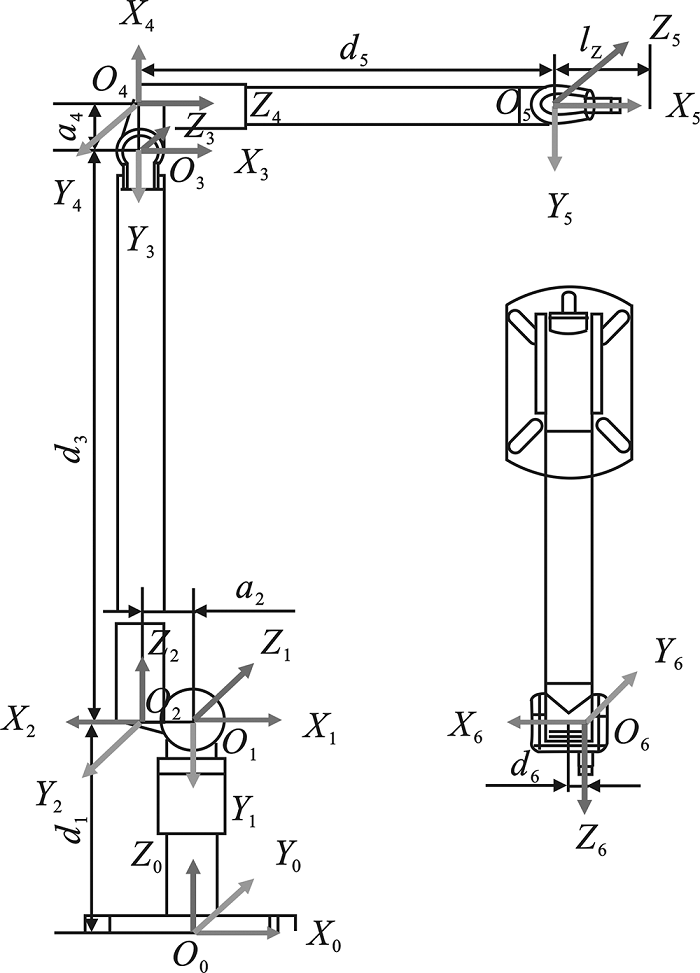
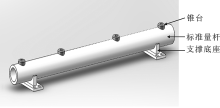
Figure 3.
Standard measuring rod device"
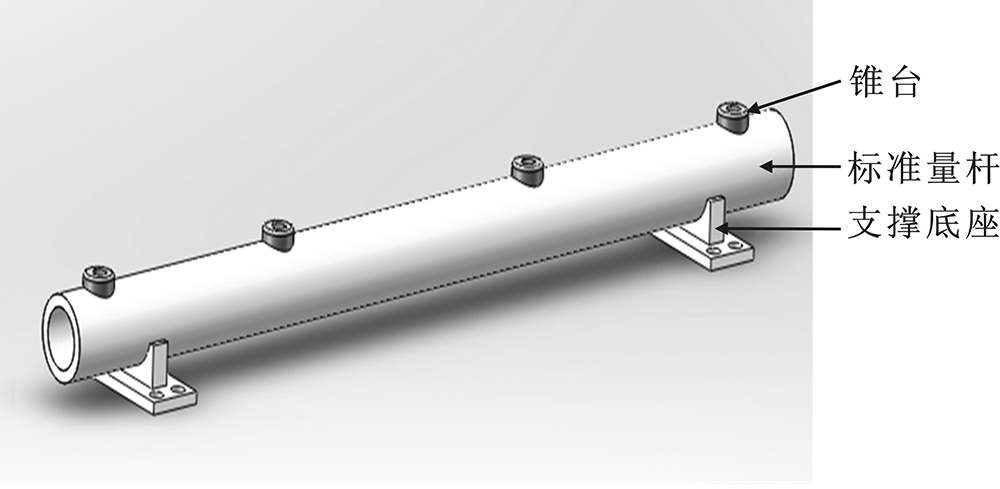
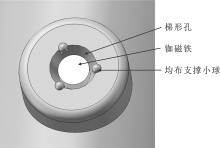
Figure 4.
Partial composition diagram of conical table"
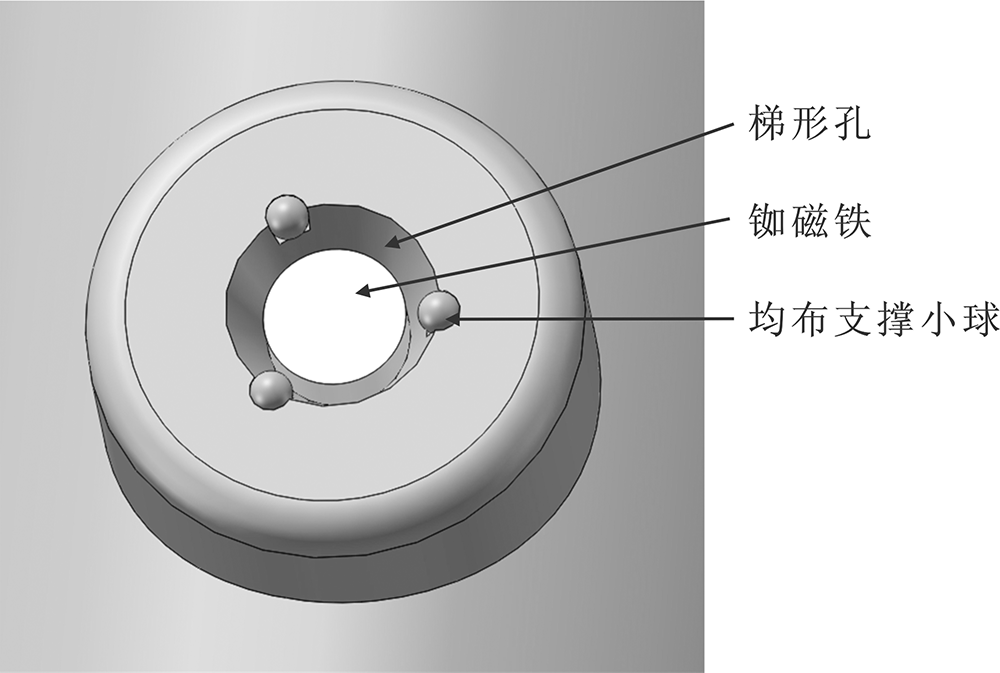
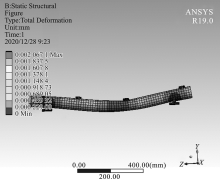
Figure 5.
Deformation analysis of standard rod device"
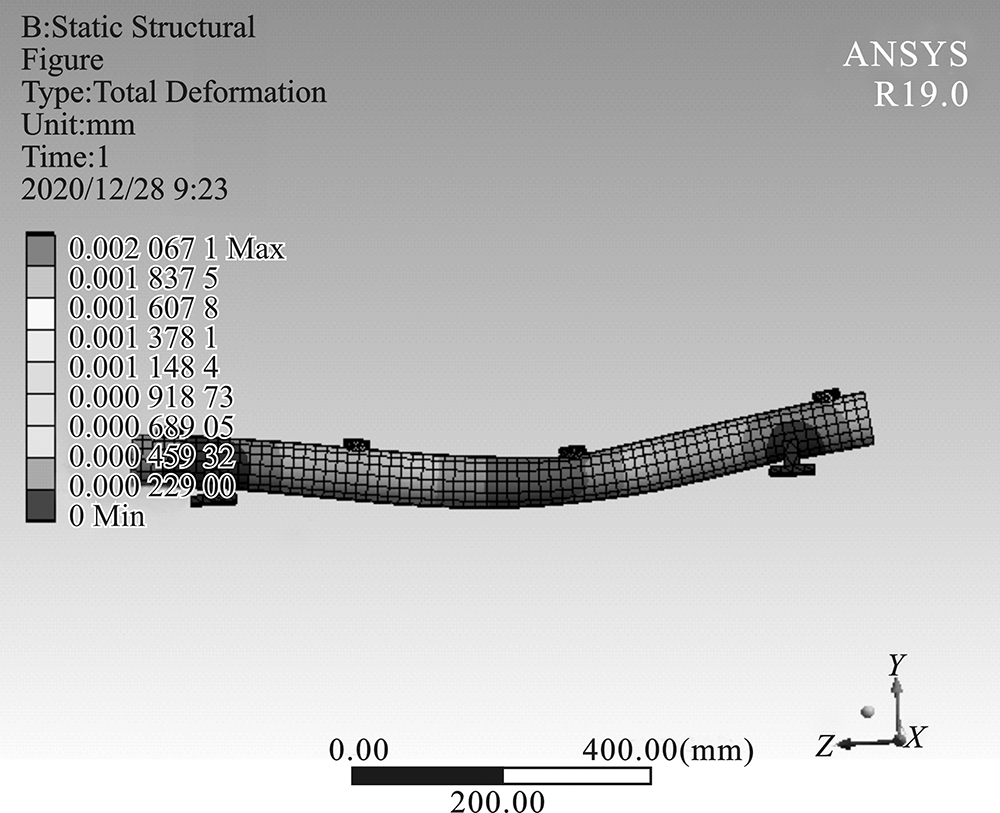
Figure 6.
Standard measuring rod bonding"

Figure 7.
Standard measuring rod assembling"


Figure 8.
Measurement of spherical center coordinates by laser tracker"

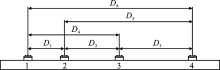
Figure 9.
Distance calculation principle"
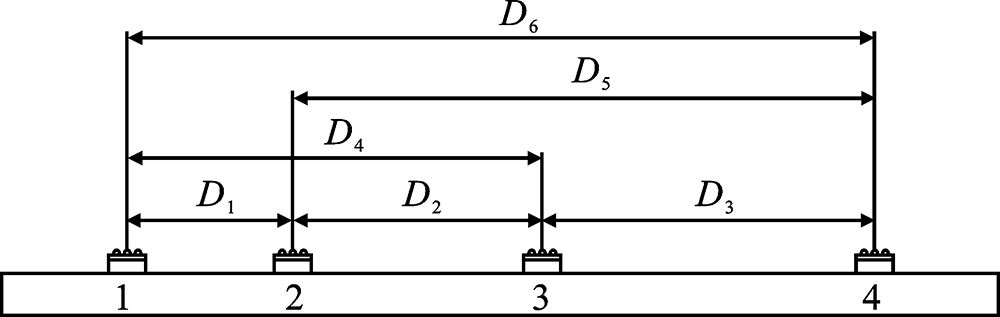
Table 1.
The center coordinate value of the target sphere/mm"
| 锥台位置 | X | Y | Z |
|---|---|---|---|
| 1 | 8.285 | -8.003 | 2 049.667 |
| 2 | 8.274 | -7.284 | 2 249.902 |
| 3 | 8.244 | -6.432 | 2 546.603 |
| 4 | 8.226 | -5.556 | 2 940.692 |
Table 2.
Standard distance between the center of each taper hole/mm"
| D1 | D2 | D3 | D4 | D5 | D6 |
|---|---|---|---|---|---|
| 200.236 3 | 296.702 2 | 394.090 0 | 496.938 5 | 690.792 2 | 891.028 4 |
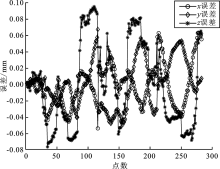
Figure 10.
Single point repetition error graph before identification"

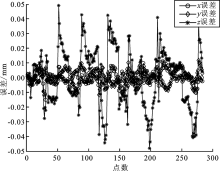
Figure 11.
Single point repetition error graph after identification"
Table 3.
Distance and error comparison before and after calibration/mm"
| 测量值 | 标定前 | 误差 | 标定后 | 误差 |
|---|---|---|---|---|
| D'1 | 200.666 1 | 0.429 9 | 200.224 6 | -0.011 6 |
| D'2 | 296.914 0 | 0.211 8 | 296.706 2 | 0.004 0 |
| D'3 | 393.421 0 | -0.529 0 | 394.061 6 | 0.028 4 |
| D'4 | 497.379 8 | 0.441 3 | 496.908 1 | 0.029 4 |
| D'5 | 690.404 8 | -0.387 4 | 690.819 0 | 0.026 8 |
| D'6 | 891.070 6 | 0.042 2 | 890.981 5 | -0.046 9 |
Table 4.
Kinematics parameter value before calibration"
| 关节i | ai /mm | di/mm | θi/(°) | αi/(°) |
|---|---|---|---|---|
| 1 | 0.153 215 195 | 280.760 795 500 | 0.048 754 760 | -90.001 412 08 |
| 2 | 62.054 285 870 | 0.002 611 776 | 0.042 066 403 | -90.015 384 87 |
| 3 | -0.092 773 727 | 750.423 405 800 | -0.027 194 945 | 90.004 904 38 |
| 4 | 62.104 003 050 | 0.105 806 614 | -0.040 441 580 | 90.015 082 67 |
| 5 | -0.018 799 695 | -500.161 217 000 | -0.062 622 289 | -90.008 312 44 |
| 6 | 97.009 325 520 | 19.467 784 130 | -0.220 642 056 | 2.566 450 91 |
| lx=0.835 562 229 mm ly=0.085 798 521 mm lz=-4.402 098 559 mm | ||||
Table 5.
Kinematics parameter value after calibration"
| 关节i | ai /mm | di/mm | θi/(°) | αi/(°) |
|---|---|---|---|---|
| 1 | 0.081 907 66 | 278.562 799 900 | 0.050 898 306 | -89.999 983 950 |
| 2 | 61.621 897 490 | -0.041 100 452 | 0.019 683 793 | -90.014 443 960 |
| 3 | -0.044 480 973 | 745.361 126 700 | -0.012 945 347 | 90.006 095 000 |
| 4 | 61.639 154 670 | 0.120 229 020 | -0.040 185 568 | 90.001 448 510 |
| 5 | -0.010 096 775 | -496.841 313 900 | -0.061 926 696 | -89.999 991 050 |
| 6 | 96.771 727 660 | 19.306 280 190 | -0.095 981 018 | 2.619 221 625 |
| lx=0.408 126 469 mm ly=-0.075 460 669 mm lz=-4.375 454 826 mm | ||||
| [1] | 汪平平, 费业泰, 尚平, 等. 柔性坐标测量机参数辨识方法[J]. 农业机械学报, 2007(7):129-132. |
| Wang Pingping, Fei Yetai, Shang Ping, et al. Parameters identification of a flexible coordinate measuring machine[J]. Transactions of the Chinese Society for Agricultural Machinery, 2007(7):129-132. | |
| [2] | 王学影, 王华, 陆艺, 等. 关节臂式坐标测量机参数标定方法[J]. 农业机械学报, 2016, 47(6):408-412. |
| Wang Xueying, Wang Hua, Lu Yi, et al. Parameter calibration method of articulated arm coordinate measuring machine[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(6):408-412. | |
| [3] | 陈久朋, 伞红军, 李鹏飞, 等. 5-DOF并串联机器人运动学分析及仿真[J]. 电子科技, 2019, 32(12):37-42. |
| Chen Jiupeng, San Hongjun, Li Pengfei, et al. Kinematics analysis and simulation for a novel 5-DOF series-parallel robot[J]. Electronic Science and Technology, 2019, 32(12):37-42. | |
| [4] | 陈久朋, 伞红军, 张道义, 等. 一种四足机器人对角步态仿真分析[J]. 电子科技, 2020, 33(5):33-37. |
| Chen Jiupeng, San Hongjun, Zhang Daoyi, et al. Diagonal gait simulation analysis of a quadruped robot[J]. Electronic Science and Technology, 2020, 33(5):33-37. | |
| [5] | 高贯斌, 王文, 林铿, 等. 基于RBF神经网络的关节转角误差补偿[J]. 机械工程学报, 2010, 46(12):20-24. |
| Gao Guanbin, Wang Wen, Lin Keng, et al. Error compensation of joint angles based on RBF neural networks[J]. Journal of Mechanical Engineering, 2010, 46(12):20-24. | |
| [6] | 高贯斌, 王文, 林铿, 等. 应用改进模拟退火算法实现关节臂式坐标测量机的参数辨识[J]. 光学精密工程, 2009, 17(10):2499-2505. |
| Gao Guanbin, Wang Wen, Lin Keng, et al. Parameter identification based on modified annealing algorithm for articulated arm CMMs[J]. Optical Precision Engineering, 2009, 17(10):2499-2505. | |
| [7] | 朱嘉齐, 章家岩, 冯旭刚. 柔性臂坐标测量机动态误差补偿算法研究[J]. 机械科学与技术, 2019, 38(8):1270-1275. |
| Zhu Jiaqi, Zhang Jiayan, Feng Xugang. Study on dynamic error compensation algorithm of coordinate measuring machine with flexible arm[J]. Mechanical Science and Technology for Aerospace Engineering, 2019, 38(8):1270-1275. | |
| [8] | 陆艺, 张培培, 王学影, 等. 基于PSO-BP神经网络的关节臂式坐标测量机长度误差补偿[J]. 计量学报, 2017, 38(3):271-275. |
| Lu Yi, Zhang Peipei, Wang Xueying, et al. Aacmm length error compensation based on PSO-BP neural network[J]. Acta Metrologica Sinica, 2017, 38(3):271-275. | |
| [9] | 郑大腾, 谢世坤, 罗志扬, 等. 关节臂坐标测量机圆光栅偏心误差建模及修正研究[J]. 电子测量与仪器学报, 2016, 30(10):1568-1574. |
| Zheng Dateng, Xie Shikun, Luo Zhiyang, et al. Circular grating eccentricity error modeling and correction of articulated arm CMMs[J]. Journal of Electronic Measurement and Instrumentation, 2016, 30(10):1568-1574. | |
| [10] | 王学影, 王华, 陆艺, 等. 关节臂式坐标测量机垂直度误差标定方法[J]. 农业机械学报, 2016, 47(11):408-413. |
| Wang Xueying, Wang Hua, Lu Yi, et al. Perpendicularity error calibration method of articulated arm coordinate measuring machine[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(11):408-413. | |
| [11] | Denavit J, Hartenberg R S. A kinematic notation for lower pair mechanism based on matrices[J]. Transactions of the ASME Journal of Applied Mechnics, 1955, 22(6):215-221. |
| [12] |
Mousavi P N, Nataraj C, Bagheri A, et al. Mathematical simulation of combined trajectory paths of a seven link biped robot[J]. Applied Mathematical Modelling, 2008, 32(7):1445-1462.
doi: 10.1016/j.apm.2007.11.026 |
| [13] |
Santolaria J, Aguilar J J, Yagüe J A, et al. Kinematic parameter estimation technique for calibration and repeatability improvement of articulated arm coordinate measuring machines[J]. Precision Engineering, 2008, 32(4):251-268.
doi: 10.1016/j.precisioneng.2007.09.002 |
| [14] | Hu Y, Fei Y T, Cheng W T. Thermal deformation error and correction for articulated arm coordinate-measuring machines[J]. Journal of Mechanical Engineering, 2011, 47(24):15-19. |
| [15] |
Levenberg K. A method for the solution of certain non-linear problems in least squares[J]. Quarterly of Applied Mathematics, 1944, 2(2):164-168.
doi: 10.1090/qam/10666 |
| [16] | 程林. 关节式坐标测量机现场标定技术研究[D]. 杭州: 杭州电子科技大学, 2017. |
| Cheng Lin. Research on the situ-calibration technology for articulated arm coordinate measuring machines[D]. Hangzhou: Hangzhou Dianzi University, 2017. |
|
