Electronic Science and Technology ›› 2021, Vol. 34 ›› Issue (1): 65-70.doi: 10.16180/j.cnki.issn1007-7820.2021.01.012
ZHANG Zhenwei,ZHANG Wei,LONG Lin,YAN Chenhang
Received:2019-10-24
Online:2021-01-15
Published:2021-01-22
Supported by:CLC Number:
ZHANG Zhenwei, ZHANG Wei, LONG Lin, YAN Chenhang. 3D Map Construction of Micro UAV Based on Depth Camera[J].Electronic Science and Technology, 2021, 34(1): 65-70.

Figure 1.
Principle of structured light camera"
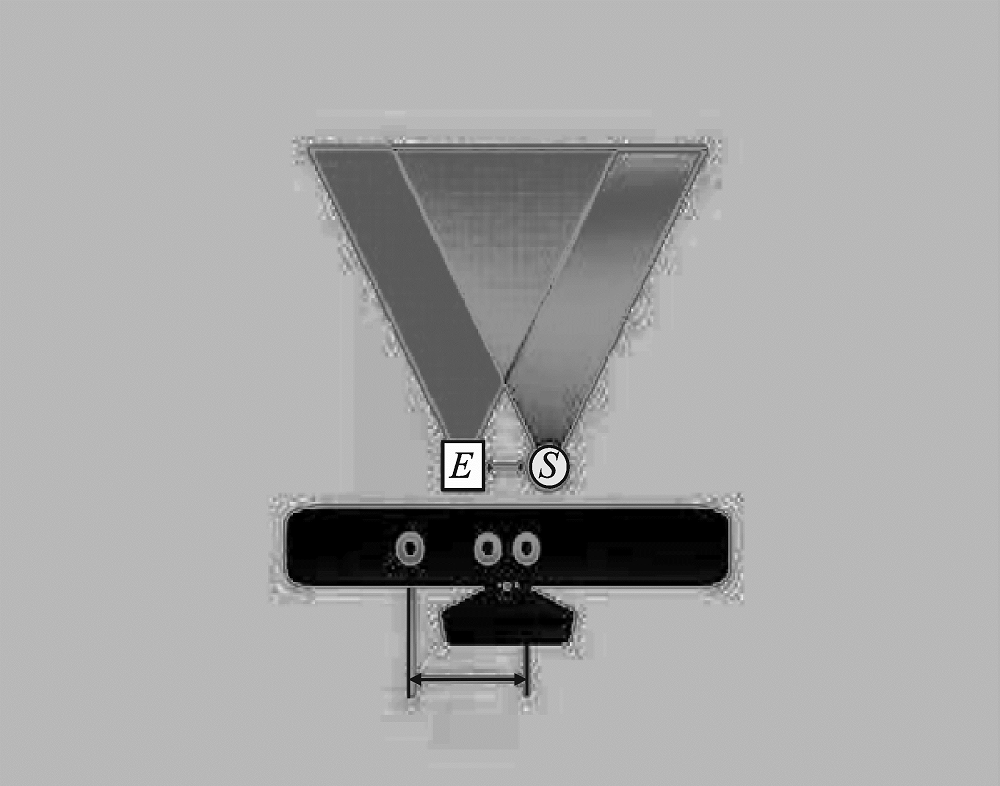
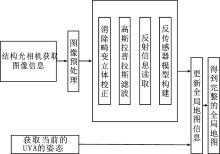
Figure 2.
Flow chart of algorithm"
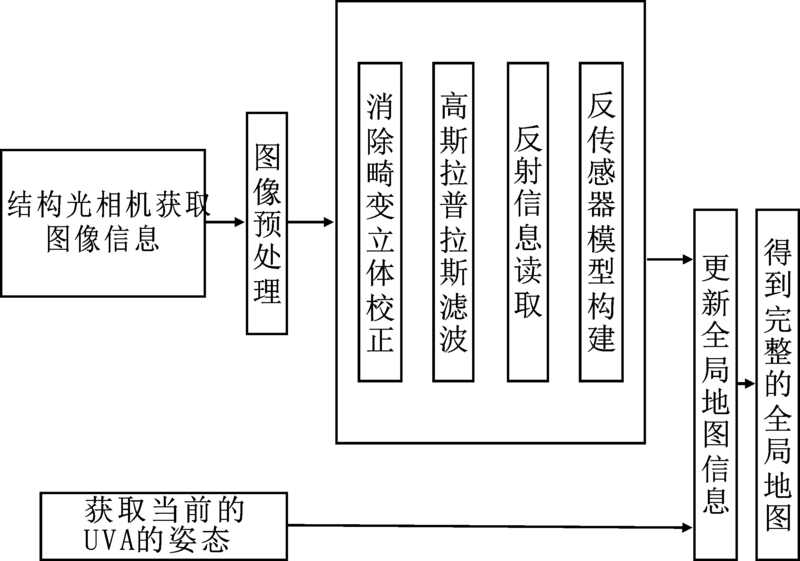
Figure 3.
Four major coordinate system relationships"
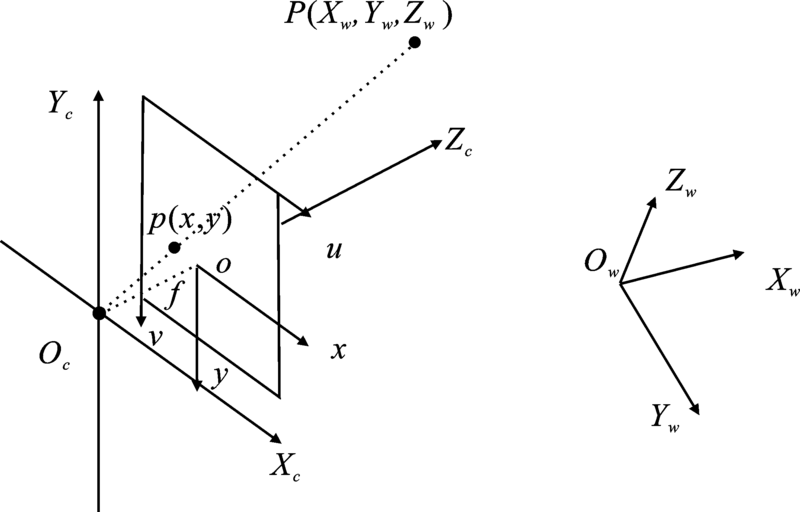
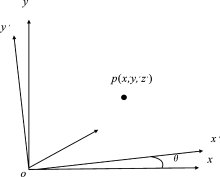
Figure 4.
World to camera coordinate conversion"
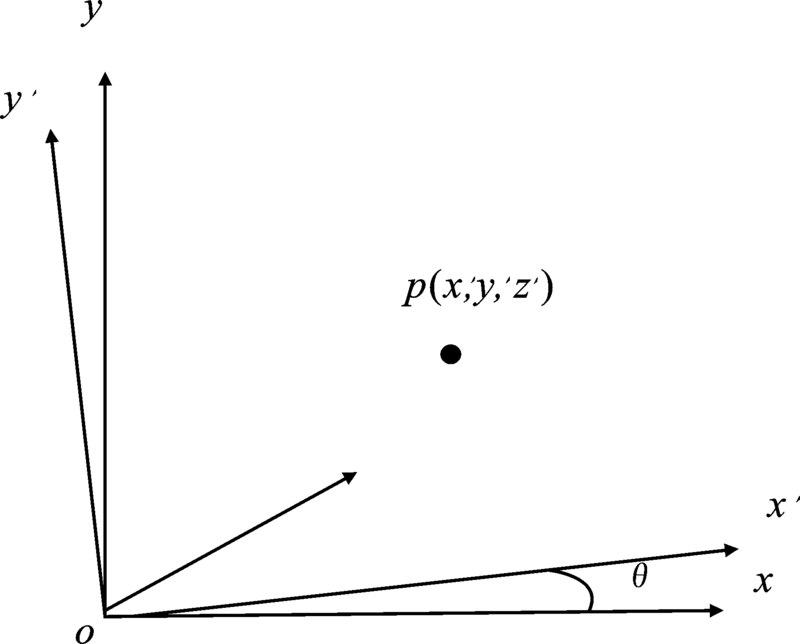
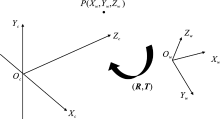
Figure 5.
Matrix conversion"
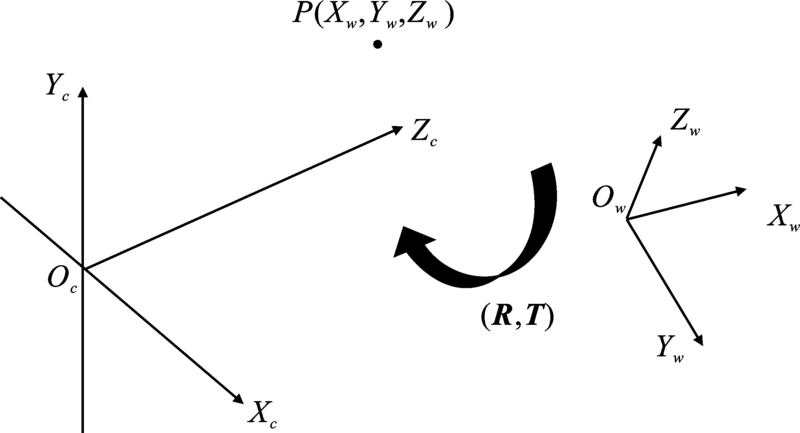
Figure 6.
Depth camera calibration"
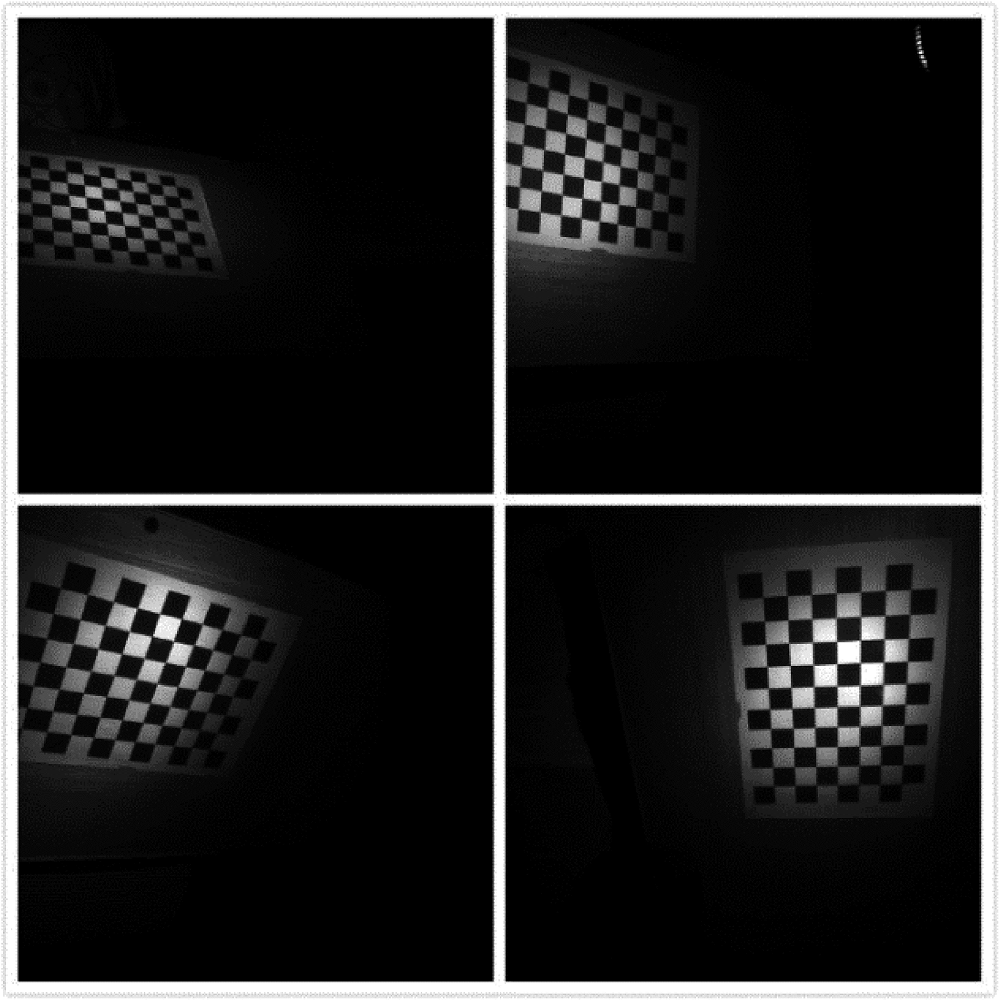
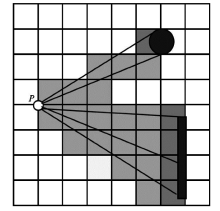
Figure 7.
Reverse sensor model"
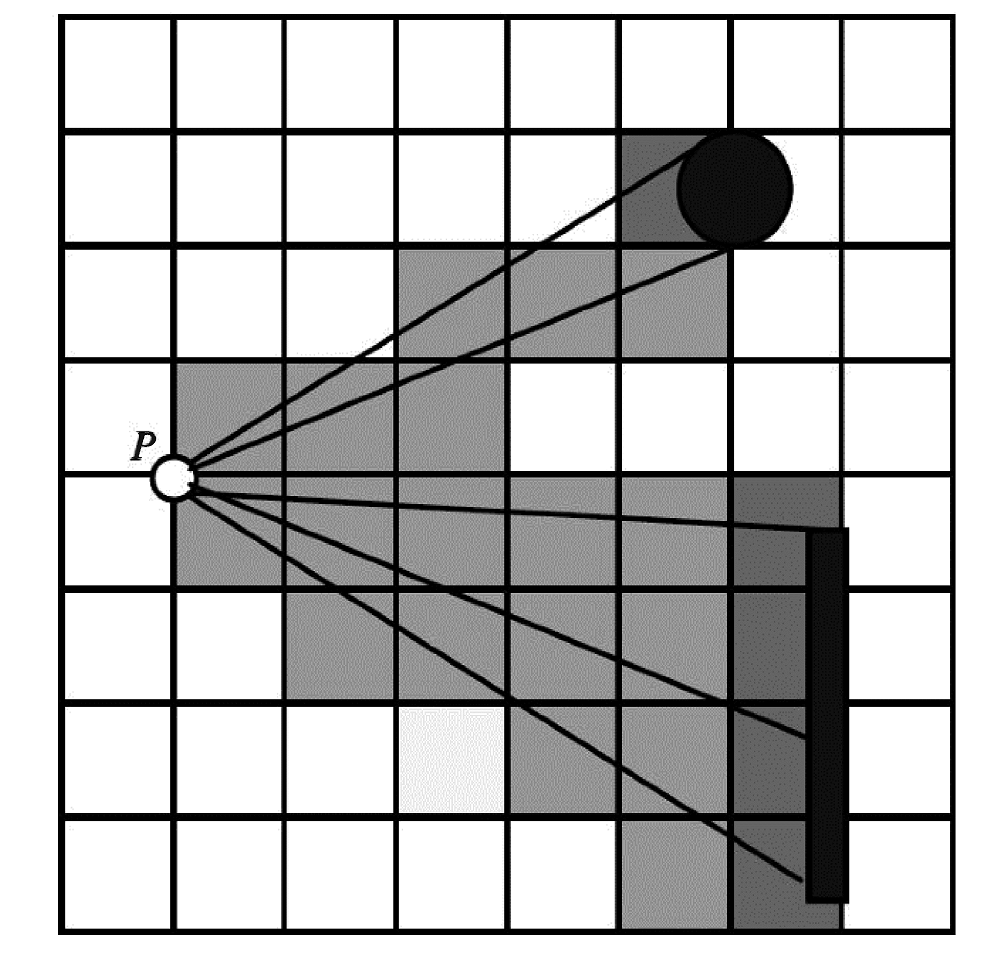

Figure 8.
Hardware platform of UAV"


Figure 9.
Indoor environment diagram of UAV"


Figure 10.
No light source indoor environment"
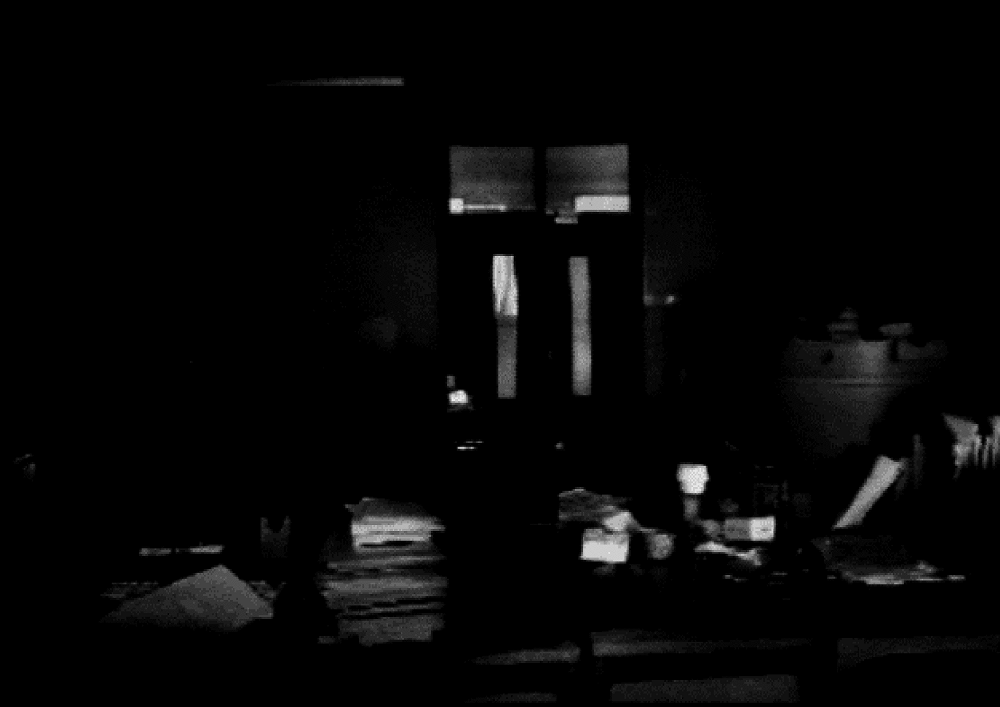
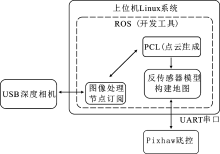
Figure 11.
UAV overall control process"

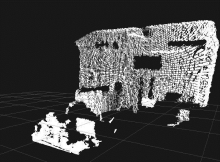
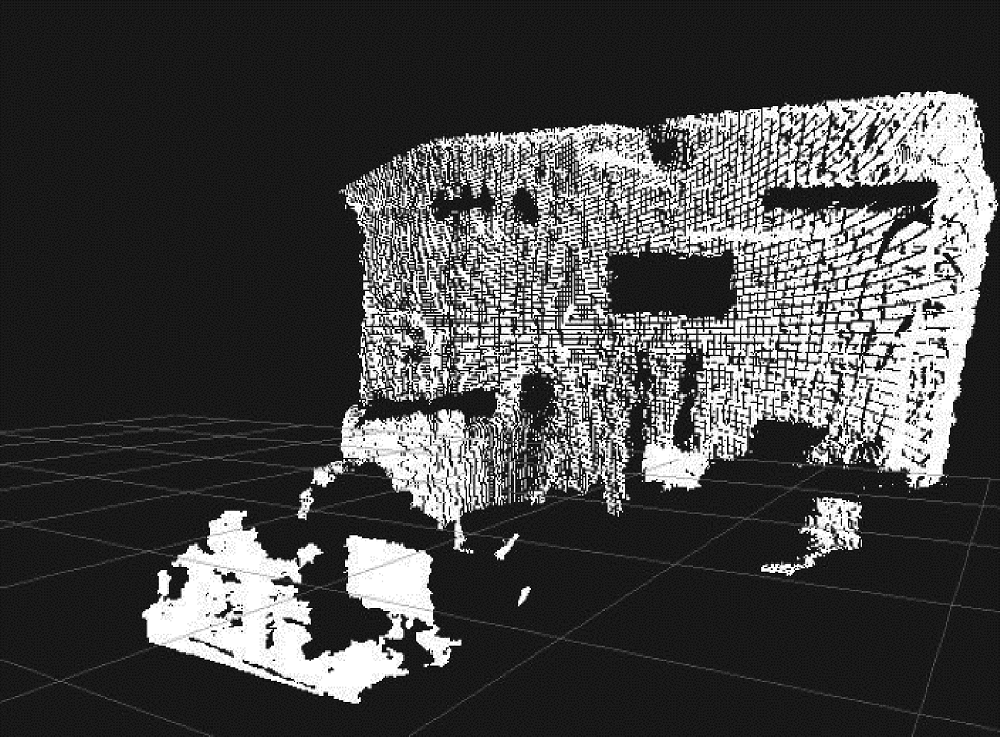
Figure 12.
Laser scan map"
| [1] | Mason J, Ricco S, Parr R. Textured occupancy grids for monocular localization without feature[C]. Shanghai: IEEE International Conference on Robotics and Automation, 2011. |
| [2] | Smith R, Cheeseman P. On the representation and estimation of spatial uncertainty[J]. International Journal of Robotics Research, 2009,5(4):56-68. |
| [3] | Keller J. Navy issues urgent order to equip MQ-8 UAV helicopter with maritime surveillance radar[J]. Military and Aerospace Electronics, 2013,24(2):31-32. |
| [4] | 梅武军. 基于ROS的多旋翼飞行器飞行控制系统的开发与设计[J]. 电子科技, 2017,30(10):23-25. |
| Mei Wujun. Development and design of flight control system for multi rotor vehicle based on ROS[J]. Electronic Science and Technology, 2017,30(10):23-25. | |
| [5] | Lin Y, Saripalli S. Sampling-based path planning for UAV collision avoidance[J]. IEEE Transactions on Intelligent Transportation Systems, 2017(99):1-14. |
| [6] | 陈智. 基于栅格法多目标路径规划研究[D]. 武汉:华中科技大学, 2015. |
| Chen Zhi. Study of the method of multi-objective path planning based on grid[D]. Wuhan:Huazhong University of Science and Technology, 2015. | |
| [7] | 宗群, 王丹丹, 邵士凯, 等. 多无人机协同编队飞行控制研究现状及发展[J]. 哈尔滨工业大学学报, 2017,49(3):1-14. |
| Zong Qun, Wang Dandan, Shao Shikai, et al. Research status and development of multi UAV coordinated formation flight control[J]. Journal of Harbin Institute of Technology, 2017,49(3):1-14. | |
| [8] | 王松波, 李马骁, 李海瑞, 等. 基于三维激光雷达技术的输电线路廊道障碍物检测研究[J]. 电子科技, 2019,32(4):85-88. |
| Wang Songbo, Li Mawei, Li Hairui, et al. Research on obstacle detection of transmission line corridor based on 3D laser radar technology[J]. Electronic Science and Technology, 2019,32(4):85-88. | |
| [9] | 朱平, 甄子洋, 覃海群, 等. 基于立体视觉和光流的无人机避障算法研究[J]. 电光与控制, 2017(12):35-39. |
| Zhu Ping, Zhen Ziyang, Qin Haiqun, et al. Stereo vision and optical flow based obstacle avoidance algorithm for UAVs[J]. Electronics Optics and Control, 2017(12):35-39. | |
| [10] | 梁定康, 钱瑞, 陈义豪, 等. 基于视觉的无人机巡检违章违停系统设计与实现[J]. 电子科技, 2018,31(5):81-96. |
| Liang Dingkang, Qian Rui, Chen Yihao, et al. Design and realization of illegal violation system based on visual inspection of UAVs[J]. Electronic Science and Technology, 2018,31(5):81-96. | |
| [11] | 吴开华, 王文杰. 植保无人机结构光视觉的障碍物检测方法[J]. 光电工程, 2018,45(4):27-35. |
| Wu Kaihua, Wang Wenjie. Detection method of obstacle for plant protection UAV based on structured light vision[J]. Opto-Electronic Engineering, 2018,45(4):27-35. | |
| [12] | Chang K, Xia Y, Huang K. UAV formation control design with obstacle avoidance in dynamic three-dimensional environment[J]. Springer Plus, 2016,5(1):1124-1138. |
| [13] | 夏令儒, 孙首群. 多无人机协同任务规划[J]. 电子科技, 2018,31(1):20-25. |
| Xia Lingru, Sun Shouqun. Planning route for UAV cooperative combat[J]. Electronic Science and Technology, 2018,31(1):20-25. | |
| [14] | 毛晨悦, 吴鹏勇. 基于人工势场法的无人机路径规划避障算法[J]. 电子科技, 2019,32(7):65-70. |
| Mao Chenyue, Wu Pengyong. UAV path planning obstacle avoidance algorithm based on artificial potential field method[J]. Electronic Science and Technology, 2019,32(7):65-70. | |
| [15] | Silva J B B, Siebra C A, Nascimento T P D. A new cost function heuristic applied to A * based path planning in static and dynamic environments [C]. Arlington:Latin American Robotics Symposium,IEEE, 2016. |
| [16] | 刘海波, 李冀. 浅析无人机自动避障系统[J]. 中国计量, 2017(9):84-85. |
| Liu Haibo, Li Ji. Analysis of automatic obstacle avoidance system for UAV[J]. China Metrology, 2017(9):84-85. | |
| [17] | 成浩浩, 齐晓慧, 杨森, 等. 一种基于一致性的四旋翼无人机编队避障方法[J]. 飞行力学, 2019,37(2):54-58. |
| Cheng Haohao, Qi Xiaohui, Yang Sen, et al. A method for obstacle avoidance of consistency based quadrotor UAV formation[J]. Flight Dynamics, 2019,37(2):54-58. |
| [1] | LIU Xuan,FU Dongxiang. Multi-Angle Virtual Glasses Trial Technology Based on Face Attitude Estimation [J]. Electronic Science and Technology, 2021, 34(9): 58-65. |
| [2] | HUANG Kewu,ZHU Ke,ZHANG Wei,QI Xin. Real-Time Tracking Algorithm for Relay Antenna of Spacecraft [J]. Electronic Science and Technology, 2021, 34(7): 1-6. |
| [3] | ZHANG Ying,LIU Zilong,WAN Wei. UAV Vehicle Target Detection Based on Faster R-CNN [J]. Electronic Science and Technology, 2021, 34(11): 11-20. |
| [4] | LI Cheng,LIU Hao,JIANG Xifeng,WU Junfa,HAN Wengang,GAO Jianguo. Intelligent Diagnosis Algorithm of Generator Stator and Rotor Based on VGG Network [J]. Electronic Science and Technology, 2021, 34(11): 62-66. |
| [5] | YANG Yuwei,SONG Fang,ZHANG Wei. Interval Estimation of Sensor Fault for Attitude Control System of UAV [J]. Electronic Science and Technology, 2021, 34(10): 56-62. |
| [6] | LI Yang,SHEN Ye,LIU Min,DAI Renyue,JIANG Xiaoyan. Multi-target Tracking Algorithm by Combining Motion Information and Apparent Information [J]. Electronic Science and Technology, 2020, 33(9): 21-25. |
| [7] | WANG Tianyi,GAO Bo. Research on Data Distribution Service of Distributed Real-time System [J]. Electronic Science and Technology, 2020, 33(8): 40-45. |
| [8] | GUO Yanan,WU Yaohui,WU Haozhen. Design of Data Acquisition and Processing System for Power Supply Integrated Protector Based on μC/OS-Ⅲ [J]. Electronic Science and Technology, 2020, 33(7): 1-5. |
| [9] | PANG Yuefeng,GU Suolin,LI Lisan,YANG Bingxian,CHU Fuyong. A Prediction Method of Receiving Signal for Ground Station Based on the Real-time Telemetry Data of Rockets [J]. Electronic Science and Technology, 2020, 33(6): 58-62. |
| [10] | ZHANG Changqing,YANG Nan. Design of Real-time Road Condition Detection System Based on Big Data Analysis of Vehicle Network [J]. Electronic Science and Technology, 2019, 32(8): 66-70. |
| [11] | WANG Runling. Adaptive Positions Fusion for Visual Tracking [J]. Electronic Science and Technology, 2019, 32(8): 12-16. |
| [12] | XIAO Yuanbin,YANG Ping. Research on the Partial Key Factors Affecting the Junction Temperature of High Power LED Lamp Chip [J]. Electronic Science and Technology, 2019, 32(3): 72-76. |
| [13] | YUE Xiu,ZHANG Wei. UAV Path Planning Based on Intelligent Algorithm [J]. Electronic Science and Technology, 2019, 32(2): 9-13. |
| [14] | YIN Tao,CUI Jiadong. Designof Pedestrian Flow Statistics System on Video Monitoring [J]. Electronic Science and Technology, 2019, 32(12): 48-52. |
| [15] | ZHANG Tianqi,ZHANG Shunkang. A Real-time Full Network Performance Anomaly Detection Algorithm Based on Principal Component [J]. Electronic Science and Technology, 2019, 32(12): 17-21. |
