Electronic Science and Technology ›› 2021, Vol. 34 ›› Issue (11): 11-20.doi: 10.16180/j.cnki.issn1007-7820.2021.11.002
Previous Articles Next Articles
ZHANG Ying,LIU Zilong,WAN Wei
Received:2020-07-06
Online:2021-11-15
Published:2021-11-16
Supported by:CLC Number:
ZHANG Ying,LIU Zilong,WAN Wei. UAV Vehicle Target Detection Based on Faster R-CNN[J].Electronic Science and Technology, 2021, 34(11): 11-20.
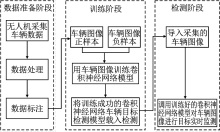
Figure 1.
Rotor-wing UAV object detection model framework"
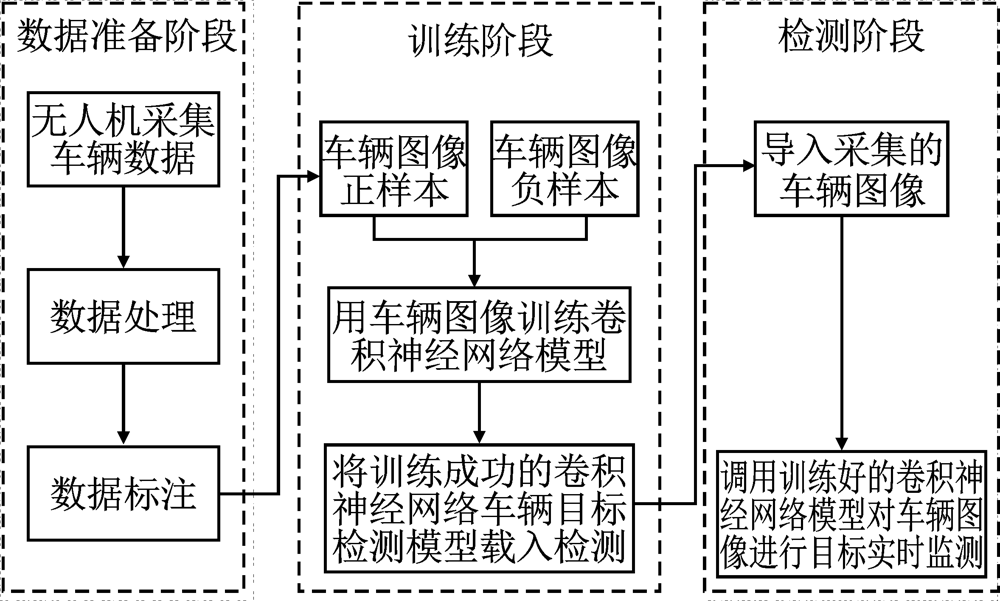
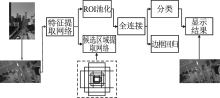
Figure 2.
Rotor-wing UAV object detection algorithm flowchart"
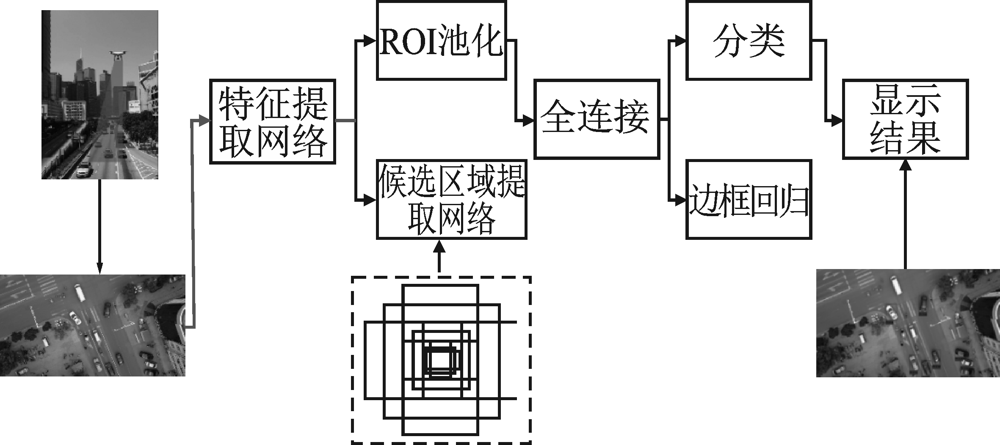

Figure 3.
Examples of aerial images from UAV perspective"
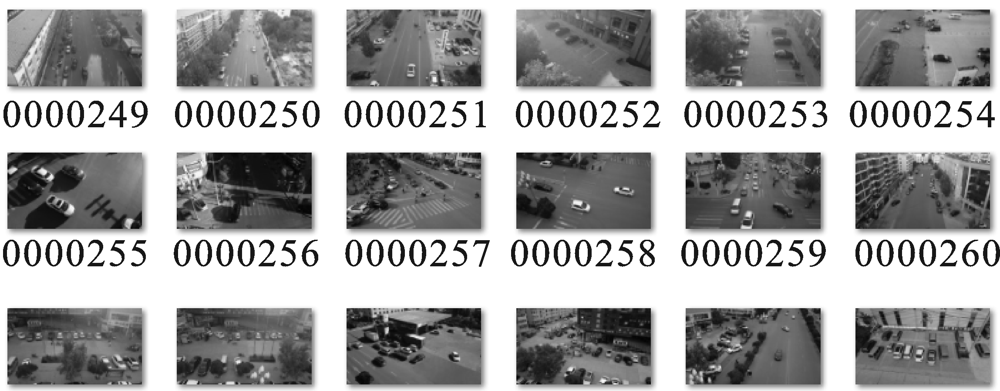
Table 1
Comparison of datasets in this study with public datasets of similar types"
| 数据集 | 采集 设备 | 分辨率 | 多场景 | 车辆图像 数目 | 车辆目标 数目 |
|---|---|---|---|---|---|
| COWC[ | 航空器 | 低 | 是 | - | 32 716 |
| VEDAI[ | 卫星 | 低 | 是 | 982 | 2 950 |
| ITCVD[ | 飞机 | 高 | 是 | 173 | 29 088 |
| UCAS-AOD[ | 卫星 | 低 | 是 | 510 | 7 114 |
| PUCCR[ | 摄像头 | 高 | 否 | 2 315 | 192 216 |
| 本文数据集 | 无人机 | 高 | 是 | 19 522 | 377 841 |
Figure 4.
Schematic diagram of the effect before and after data enhancement (a)Original image (b)Enhanced saturation,(c)Horizontal flip (d)Addition of Gaussian noise"
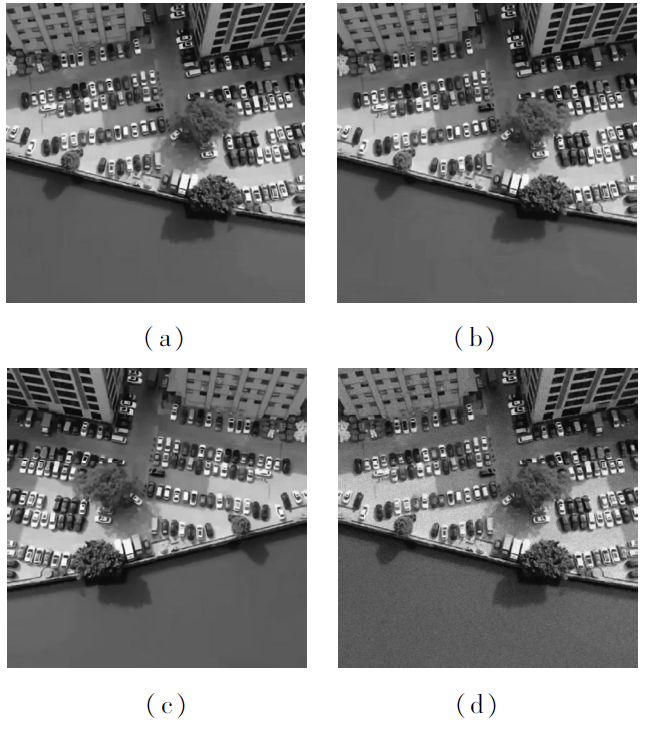
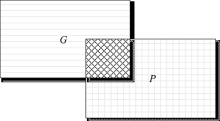
Figure 5.
Schematic diagram of IoU"
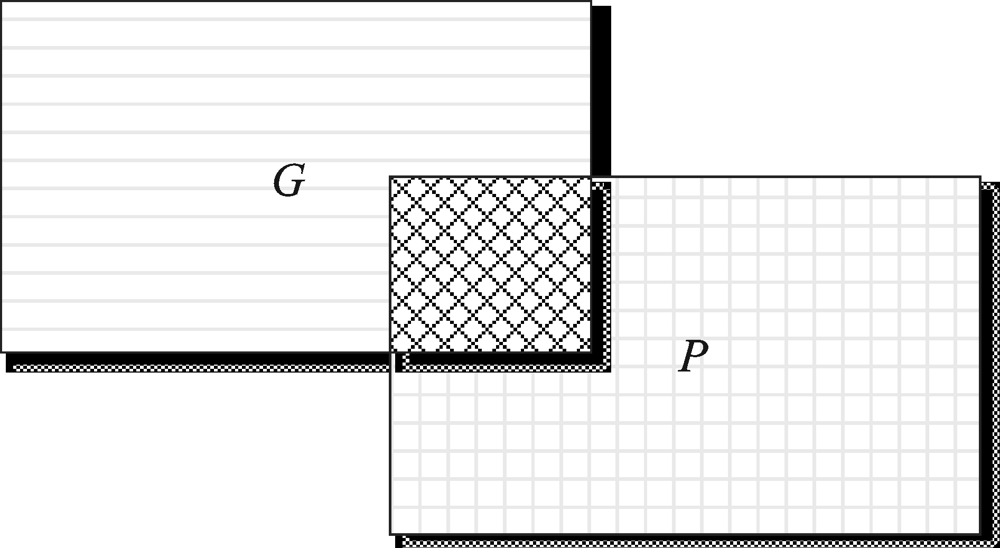
Table 2
AP value of different feature extraction network models"
| 网络结构 | VGG-16 | ResNet-34 | ResNet-50 | ResNet-101 |
|---|---|---|---|---|
| AP值/% | 83.14 | 84.91 | 87.04 | 88.75 |

Figure 6.
Schematic diagram of the improved network structure"
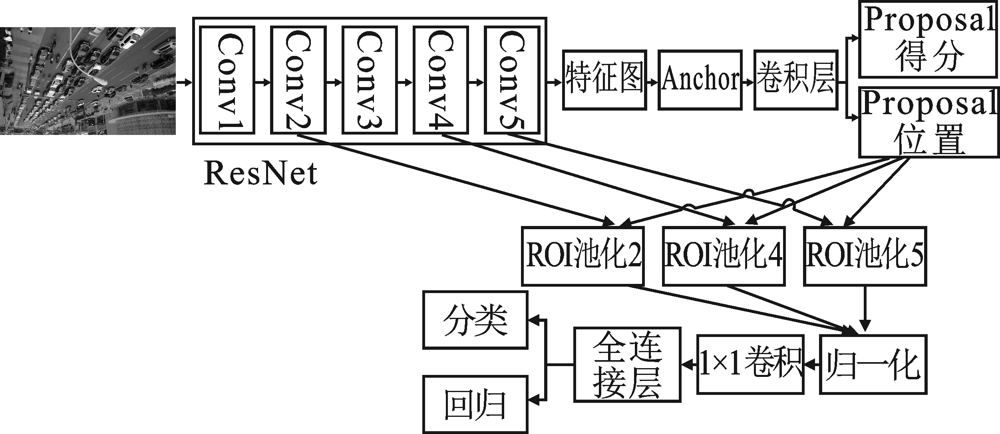

Figure 7.
The area histogram of dataset Ground Truth"
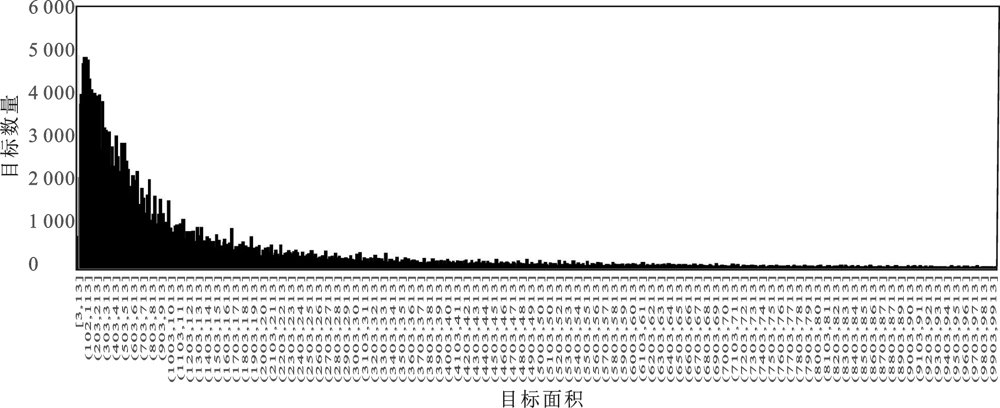

Figure 8.
The scale histogram of dataset Ground Truth"
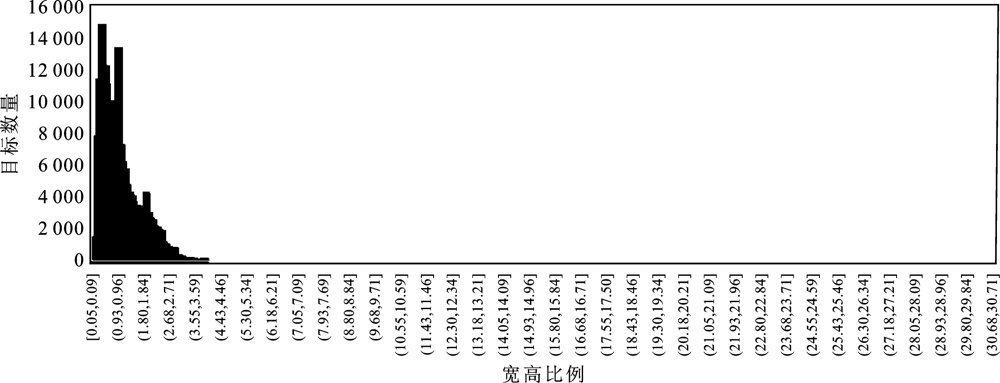
Table 3
Model performance under different combinations of Anchors"
| Anchor数量 | Anchor组合 | AP值/% |
|---|---|---|
| 3 | {162,322,642} | 91.81 |
| 3 | {322,642,962} | 90.80 |
| 3 | {642,962,1282} | 89.19 |
| 4 | {162,322,642,962} | 93.54 |
| 4 | {322,642,962,1282} | 91.97 |
| 5 | {162,322,642,962,1282} | 94.03 |
Figure 9.
Loss curve on a small sample set"
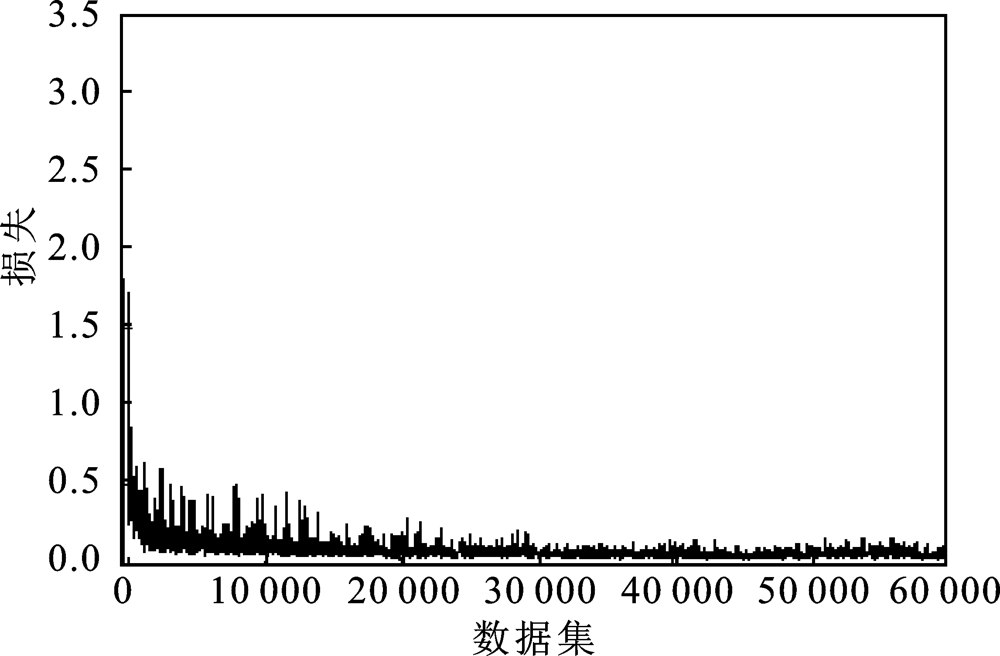
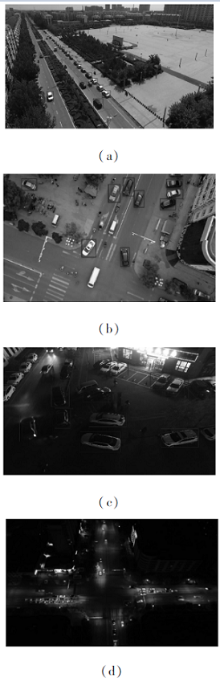
Figure 10.
Test effect of Faster R-CNN basic model (a)Detection effect of daytime small targets (b)Detection effect of daytime non-small targets (c)Detection effect of nighttime non-small targets (d)Detection effect of nighttime small targets."
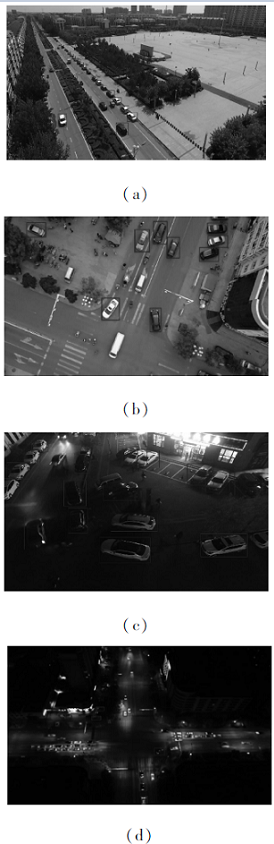

Figure 11.
Example of missed detection of small targets"
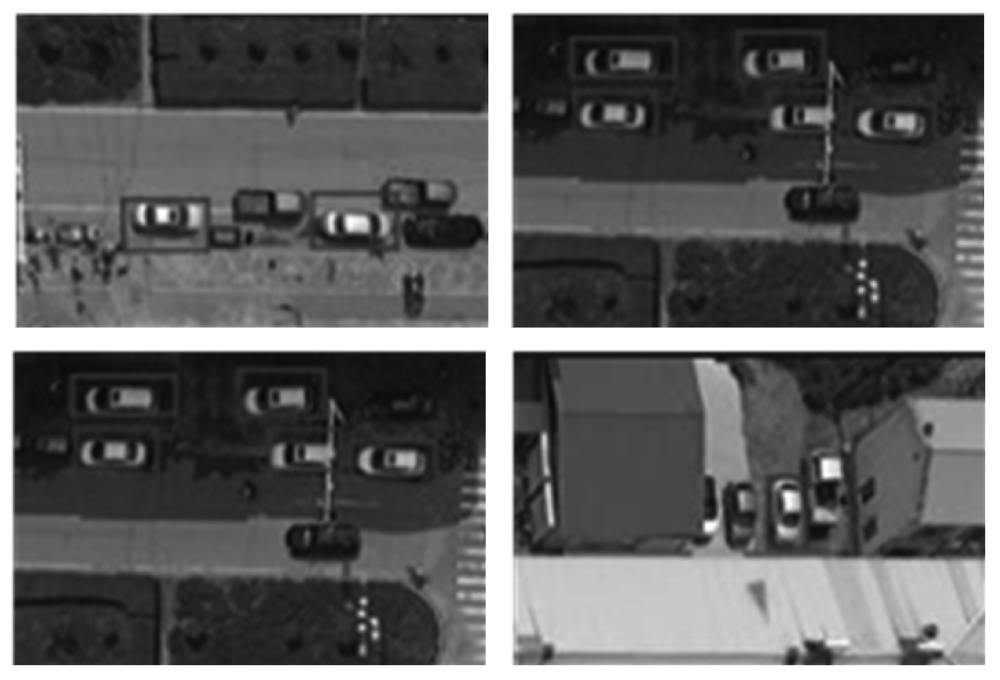

Figure 12.
Example of missed detection of incomplete targets"


Figure 13.
Example of missed detection of targets with severe overlapping detection frames"

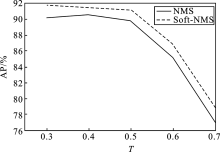
Figure 14.
AP values of NMS algorithm and Soft-NMS algorithm corresponding to different thresholds T"
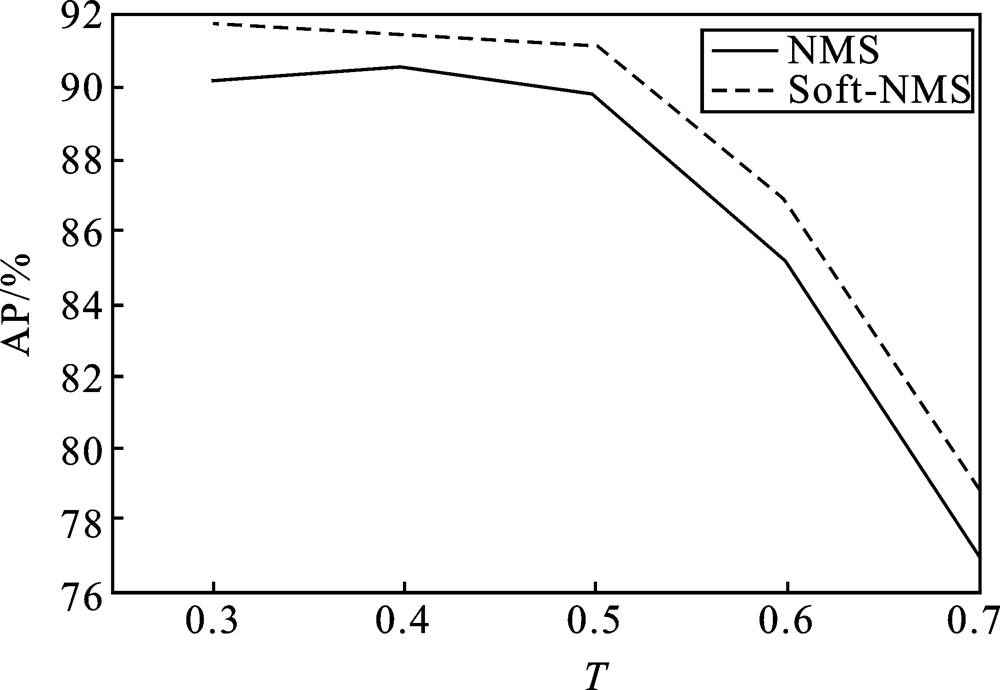
Table 4
AP values corresponding to different α values"
| α=0.3 | α=0.4 | α=0.5 | α=0.6 | α=0.7 | α=0.8 | α=0.9 | α=1.0 | |
|---|---|---|---|---|---|---|---|---|
| 改进Soft-NMS算法1 | 91.57 | 91.44 | 91.26 | 91.81 | 91.32 | 91.27 | 91.31 | 91.08 |
| 改进Soft-NMS算法2 | 91.32 | 91.03 | 91.09 | 91.47 | 91.48 | 91.36 | 91.01 | 91.77 |
Table 5
AP values corresponding to different σ values"
| σ取值 | 0.001 | 0.002 | 0.003 | 0.004 |
|---|---|---|---|---|
| AP值/% | 91.81 | 91.53 | 91.62 | 91.59 |
Table 6
AP values of models before and after improvement of NMS algorithm"
| 基准 实验 | 数据增强 改进 | 特征提取网络 改进 | NMS算法 改进 | |
|---|---|---|---|---|
| AP值/% | 80.57 | 83.14 | 90.64 | 91.81 |
Table 7
Comparison of testing indicators before and after optimization of algorithm"
| 基准 实验 | 数据增 强改进 | 特征提取 网络调整 | 网络结 构改进 | NMS算 法改进 | anchor 调整 | |
|---|---|---|---|---|---|---|
| AP值/% | 80.57 | 83.14 | 88.75 | 90.64 | 91.81 | 94.03 |
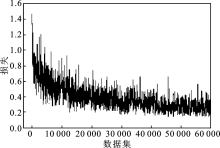
Figure 15.
Faster R-CNN network Loss curve before improvement"
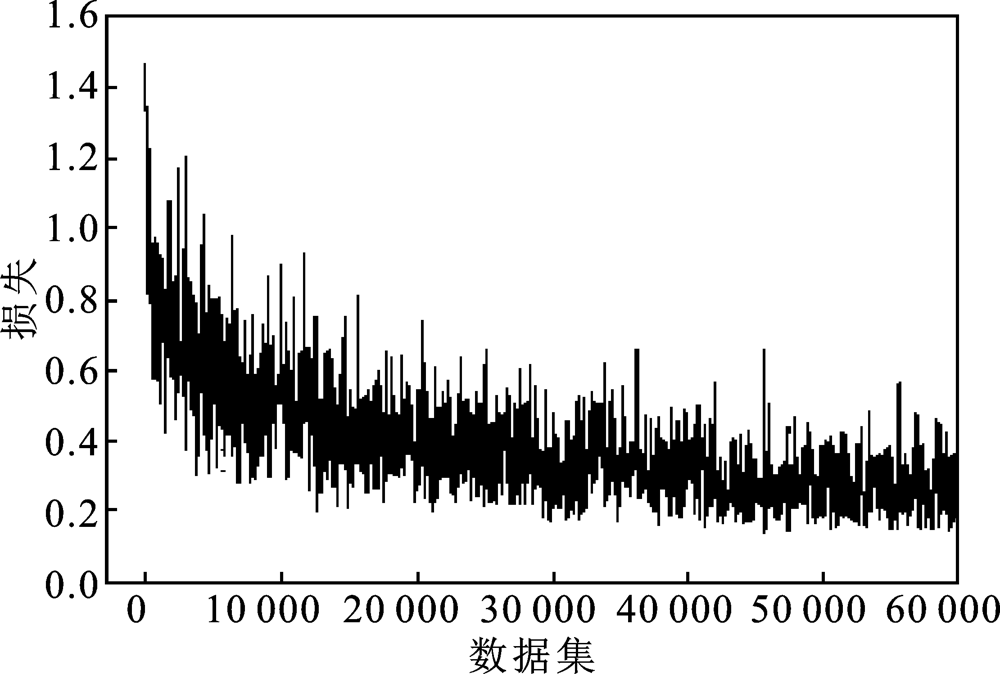
Figure 16.
Improved Faster R-CNN network Loss curve"
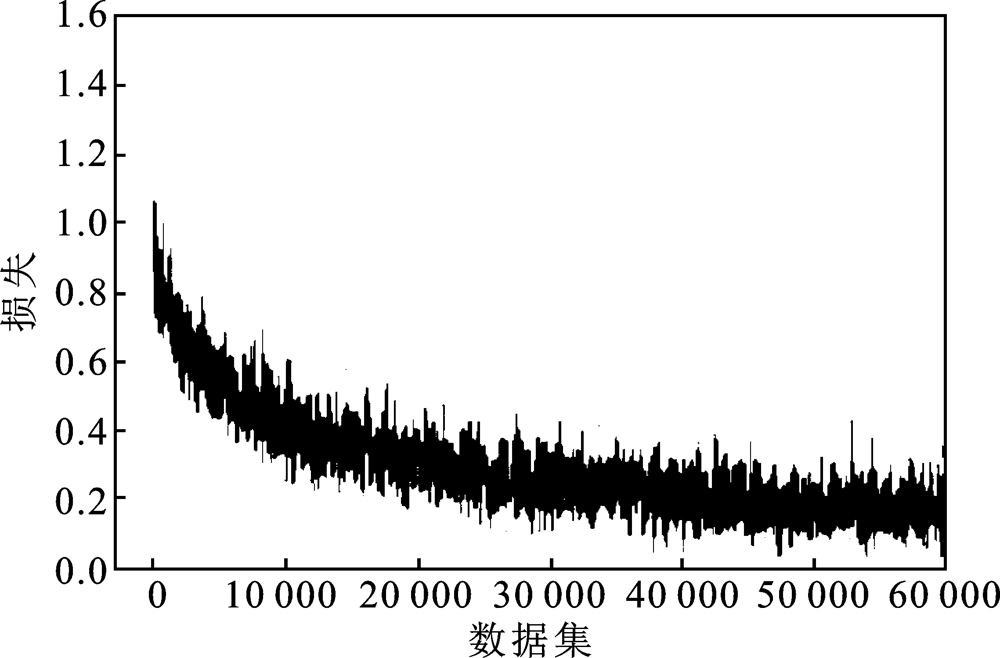
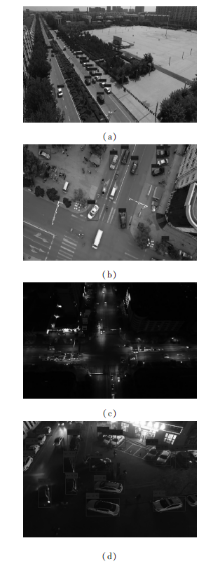
Figure 17.
Detection effect diagrams of improved Faster R-CNN model in different environments (a)Detection effect of daytime small targets (b)Detection effect of daytime non-small targets (c)Detection effect of nighttime non-small targets (d)Detection effect of nighttime small targets"
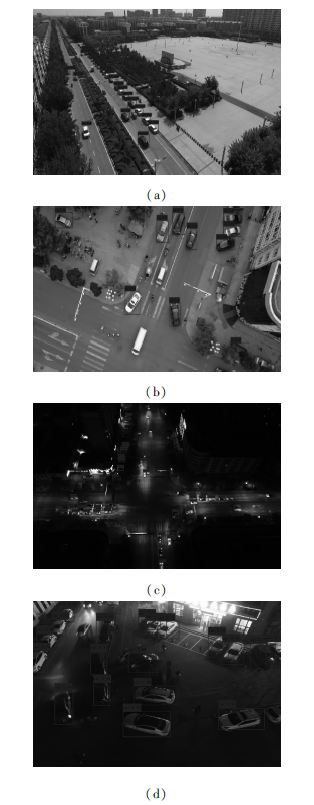
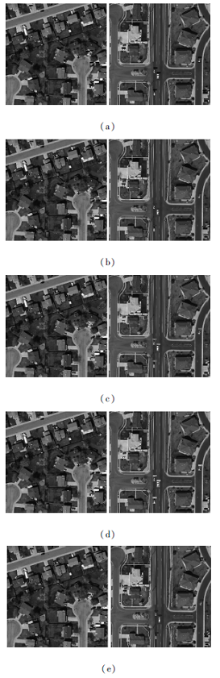
Figure 18.
Measurement effect of each algorithm on the VEDAI dataset (a)Measurement example of Faster R-CNN algorithm (b)Measurement example of R-FCN algorithm (c)Measurement example of YOLOv3 algorithm (d)Measurement example of SSD algorithm (e)Measurement example of algorithm proposed in this study"
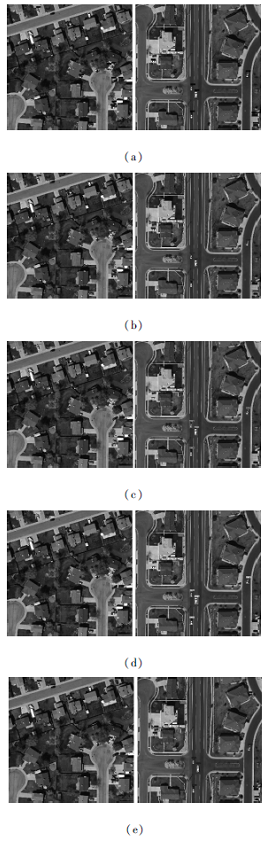
Table 8
Comparison of testing indicators of five vehicle detection algorithms on VEDAI dataset"
| 算法 | AP值/% | 召回率/% |
|---|---|---|
| Faster R-CNN (VGG16) | 74.68 | 75.58 |
| YOLOv3 (darknet53) | 72.55 | 72.98 |
| SSD (VGG16) | 67.69 | 70.76 |
| R-FCN (ResNet101) | 79.42 | 83.21 |
| 本文算法 | 82.94 | 86.23 |
| [1] | 袁小平, 王岗, 王晔枫, 等. 基于改进卷积神经网络的交通标志识别方法[J]. 电子科技, 2019, 32(11):28-32. |
| Yuan Xiaoping, Wang Gang, Wang Yefeng, et al. Traffic sign recognition method based on improved convolutional neural network[J]. Electronic Science and Technology, 2019, 32(11):28-32. | |
| [2] | Joseph R, Santosh D, Ross G, et al. You only look once: unified, real-time object detection[C]. Las Vegas:IEEE Conference on Computer Vision and Pattern Recognition, 2016. |
| [3] | Joseph R, Ali F. YOLO9000:Better,faster,stronger[C]. Honolulu:IEEE Conference on Computer Vision and Pattern Recognition, 2016. |
| [4] | Jiao Z T, Zhang Y M, Mu L X, et al. A YOLOv3-based learning strategy for real-time UAV-based forest fire detection[C]. Hefei:The Thirty-second Conference on Control and Decision-Making in China, 2020. |
| [5] | Wei L, Dragomir A, Dumitru E, et al. SSD:Single shot multibox detector[C]. London:European Conference on Computer Vision, 2016. |
| [6] | Ross G, Jeff D, Trevor D, et al. Rich feature hierarchies for accurate object detection and semantic segmentation[C]. Columbus:IEEE Conference on Computer Vision and Pattern Recognition, 2014. |
| [7] | Ross G. Fast R-CNN[C]. Santiago:IEEE International Conference on Computer Vision, 2015. |
| [8] |
Shaoqing R, Kaiming H, Ross G, et al. Faster R-CNN: towards real-time object detection with region proposal networks[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 39(6):1137-1149.
doi: 10.1109/TPAMI.2016.2577031 pmid: 27295650 |
| [9] | Zhu P, Wen L, Du D, et al. Visdron-det2018:The vision meets drone object detetion in image challenge result[C]. Munich:Proceedings of the European Conference on Computer Vision, 2018. |
| [10] | Mundhenk T N, Konjevod G, Sakla W A, et al. A large contextual dataset for classification, detection and counting of cars with deep learning[C]. Amsterdam:European Conference on Computer Vision, 2016. |
| [11] |
Sébastien R, Frédéric J. Vehicle detection in aerial imagery:a small target detection benchmark[J]. Journal of Visual Communication and Image Representation, 2016, 34(7):187-203.
doi: 10.1016/j.jvcir.2015.11.002 |
| [12] | Yang M Y, Liao W, Li X, et al. Vehicle detection in aerial images[J]. American Society for Photogrammetry and Remote Sensing, 2019, 85(4):297-304. |
| [13] | Zhu H G, Chen X G, Dai W Q, et al. Orientation robust object detection in aerial images using deep convolutional neural network[C]. Quebec City:IEEE International Conference on Image Processing, 2015. |
| [14] |
De A, Paulo R L O, Luiz S B, et al. PKLot-A robust dataset for parking lot classification[J]. Expert Systems with Applications, 2015, 42(11):4937-4949.
doi: 10.1016/j.eswa.2015.02.009 |
| [15] | 周文凯, 韩芳, 孔维健. 基于Faster-RCNN的极验点选式验证码识别[J]. 电子科技, 2019, 32(9):42-46. |
| Zhou Wenkai, Han Fang, Kong Weijian. Point-selective geetest captcha recognition based on Faster-RCNN[J]. Electronic Science and Technology, 2019, 32(9):42-46. | |
| [16] | He K, Zhang X, Ren S, et al. Deep residual learning for image recognition[C]. Las Vegas:IEEE Conference on Computer Vision and Pattern Recognition, 2016. |
| [17] | Alexander N, Luc V G. Efficient non-maximum suppression[C]. Hong Kong:The Eighteenth International Conference on Pattern Recognition, 2006. |
| [18] | 赵文清, 严海, 邵绪强. 改进的非极大值抑制算法的目标检测[J]. 中国图象图形学报, 2018(11):1676-1685. |
| Zhao Wenqing, Yan Hai, Shao Xuqiang. Target detection based on improved non maximum suppression algorithm[J]. Journal of Image and Graphics, 2018(11):1676-1685. | |
| [19] | Navaneeth B, Bharat S, Rama C, et al. Soft-NMS--Improving object detection with one line of code[C]. Venice:IEEE International Conference on Computer Vision, 2017. |
| [20] | 杨超, 周大可, 杨欣. 基于检测-分割的图像拼接篡改盲取证算法[J]. 电子设计工程, 2020, 28(13):169-174. |
| Yang Chao, Zhou Dake, Yang Xin. Spliced image blind forensics based on detection and segmentation[J]. Electronic Design Engineering, 2020, 28(13):169-174. |
| [1] | LI Hui,WANG Yicheng. CNNCIFG-Attention Model for Text Sentiment Classifcation [J]. Electronic Science and Technology, 2022, 35(2): 46-51. |
| [2] | ZHAN Yinwei,ZHU Baiwan,YANG Zhuo. Research and Application of Vehicle Face Recognition Algorithm [J]. Electronic Science and Technology, 2021, 34(8): 1-7. |
| [3] | LIAO Luming,ZHANG Wei. Batch Mixed Training Traffic Sign Recognition Based on Improved VGG16 Network [J]. Electronic Science and Technology, 2021, 34(8): 8-13. |
| [4] | GU Wei,LI Feifei,CHEN Qiu. Pedestrian Detection Algorithm Based on Multiple Feature Fusion [J]. Electronic Science and Technology, 2021, 34(5): 29-34. |
| [5] | XUE Yongjie,JU Zhiyong. Fish Recognition Algorithm Based on Improved AlexNet [J]. Electronic Science and Technology, 2021, 34(4): 12-17. |
| [6] | ZHANG Can,CHEN Wei,YIN Zhong. Semantic Segmentation of Cervical Cell Image Based on Weak Supervision [J]. Electronic Science and Technology, 2021, 34(12): 68-74. |
| [7] | LI Cheng,LIU Hao,JIANG Xifeng,WU Junfa,HAN Wengang,GAO Jianguo. Intelligent Diagnosis Algorithm of Generator Stator and Rotor Based on VGG Network [J]. Electronic Science and Technology, 2021, 34(11): 62-66. |
| [8] | SU Ye,LI Jun,YANG Haima,LIU Jin,JIANG Shenghua. Research on Rail Surface Defect Recognition Based on Faster R-CNN [J]. Electronic Science and Technology, 2020, 33(9): 63-68. |
| [9] | ZHANG Xiang,SHI Zhicai,CHEN Liang. Expression Recognition Method Based on Cascade Network Optimized by SWA [J]. Electronic Science and Technology, 2020, 33(9): 16-20. |
| [10] | LU Chaowen,LI Feifei,CHEN Qiu. An Image Retrieval Algorithm Based on Improved Hashing Method [J]. Electronic Science and Technology, 2020, 33(5): 28-32. |
| [11] | SI Qin,LI Feifei,CHEN Qiu. Face Recognition Algorithm Based on Deep Learning and Feature Fusion [J]. Electronic Science and Technology, 2020, 33(4): 18-22. |
| [12] | CHENG Junhua,ZENG Guohui,LIU Jin. Research on Complex Background Image Classification Method Based on Deep Learning [J]. Electronic Science and Technology, 2020, 33(12): 59-66. |
| [13] | MIAO Ran,LI Feifei,CHEN Qiu. Scene Recognition Algorithm Based on Convolutional Neural Networks and Multi-Scale space Encoding [J]. Electronic Science and Technology, 2020, 33(12): 54-58. |
| [14] | ZHOU Wenkai,HAN Fang,KONG Weijian. Point-selective Geetest CAPTCHA Recognition Based on Faster-RCNN [J]. Electronic Science and Technology, 2019, 32(9): 42-46. |
| [15] | HU Shaocong. Research on Face Recognition Based on Deep Learning [J]. Electronic Science and Technology, 2019, 32(6): 82-86. |
