

Journal of Xidian University ›› 2022, Vol. 49 ›› Issue (2): 207-217.doi: 10.19665/j.issn1001-2400.2022.02.024
• Computer Science and Technology & Cyberspace Security • Previous Articles Next Articles
ZHOU Peng1( ),YANG Jun2()
),YANG Jun2()
Received:2020-10-06
Online:2022-04-20
Published:2022-05-31
Contact:
Jun YANG
E-mail:zhoupeng@mail.lzjtu.cn.;yangj@mail.lzjtu.cn
CLC Number:
ZHOU Peng,YANG Jun. Index edge geometric convolution neural network for point cloud classification[J].Journal of Xidian University, 2022, 49(2): 207-217.
"

"
"
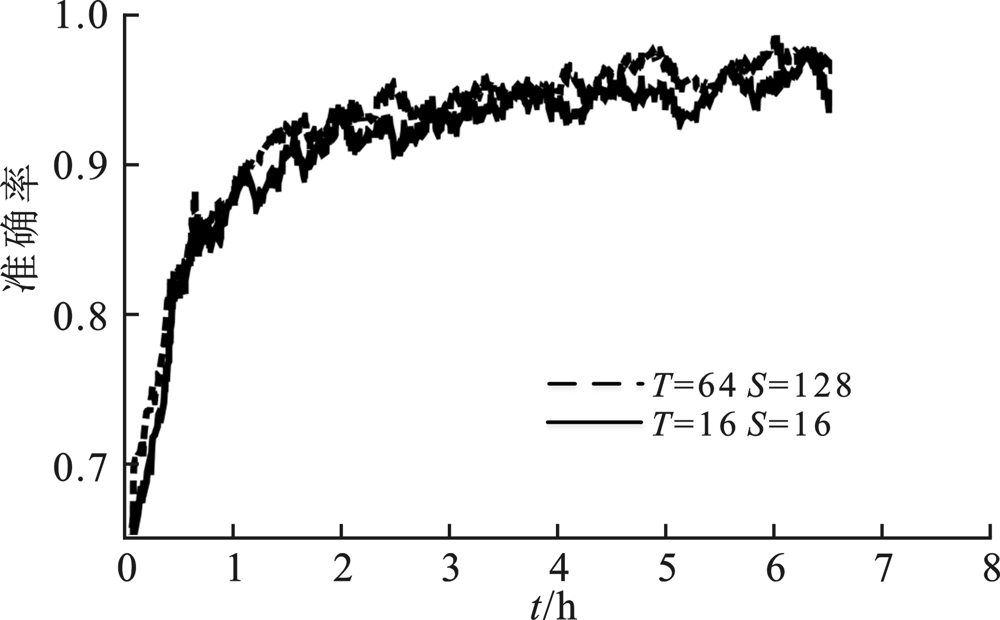
| 组号 | 名次 | R | T | S | K | M | P | 准确率/% |
|---|---|---|---|---|---|---|---|---|
| G1 | No.1 | 64 | 64 | 128 | 1 024 | 512 | 256 | 92.91 |
| G1 | No.2 | 64 | 16 | 16 | 1 024 | 256 | 256 | 92.74 |
| G1 | No.3 | 64 | 1 024 | 256 | 256 | 91.71 | ||
| G2 | No.4 | 128 | 128 | 256 | 256 | 90.99 | ||
| G2 | No.5 | 128 | 128 | 256 | 91.64 | |||
| G3 | No.6 | 16 | 1 024 | 256 | 91.52 | |||
| G3 | No.7 | 64 | 1 024 | 256 | 92.17 | |||
| G3 | No.8 | 256 | 1 024 | 256 | 92.29 | |||
| G3 | No.9 | 512 | 1 024 | 256 | 92.09 | |||
| G4 | No.10 | 128 | 64 | 256 | 90.99 | |||
| G4 | No.11 | 128 | 256 | 256 | 91.92 | |||
| G4 | No.12 | 128 | 512 | 256 | 92.13 | |||
| G4 | No.13 | 128 | 1 024 | 256 | 92.78 | |||
| G4 | No.14 | 128 | 2 048 | 256 | 92.69 |
"
"
"
"
"
"
"
| 层 | 卷积核 | 步长 | 输出维度 | 参数个数 |
|---|---|---|---|---|
| C1 | 1×3 | 1×1 | 64×n×1 | 256 |
| C2 | 1×1 | 1×1 | 128×n×1 | 8 320 |
| C3 | 1×1 | 1×1 | 1 024×n×1 | 132 096 |
| Pooling | n×1 | 1×1 | 1 024×1 | 1 024 |
| FC | 256 | 262 400 | ||
| 输出 | k | 257k |
"
| 输入 | 算法 | params/M | ModelNet40 | ModelNet10 |
|---|---|---|---|---|
| Multi-view | MVCNN[ | ~138.00 | 90.10 | |
| Multi-view | Pairwise[ | ~138.00 | 90.70 | 92.80 |
| Volumetric | 3DShapeNets[ | ~38.00 | 77.32 | 83.54 |
| Volumetric | VRN Ensemble[ | ~90.00 | 95.54 | 97.14 |
| Volumetric | VRN[ | ~18.00 | 91.33 | 93.61 |
| Volumetric | Voxception[ | 90.56 | 93.28 | |
| Volumetric | VoxNet[ | ~0.92 | 83.00 | 92.00 |
| Volumetric | LightNet[ | ~0.30 | 86.90 | 93.39 |
| Vol.+Mul. | FusionNet[ | ~118.00 | 90.80 | 93.11 |
| PointCloud | PointNet[ | 3.48 | 89.20 | 93.08 |
| PointCloud | PointNet(vanilla)[ | 0.80 | 87.20 | 91.96 |
| PointCloud | PointNet++[ | 1.48 | 90.70 | |
| PointCloud | DGCNN[ | 1.84 | 92.20 | |
| PointCloud | LDGCNN[ | 92.90 | ||
| PointCloud | 3DmFV-Net[ | 4.60 | 91.60 | 95.20 |
| PointCloud | Point2Sequences[ | 92.60 | 95.30 | |
| 文中方法 | IEGCNN | 0.61 | 92.78 | 94.20 |
| [1] | 刘道华, 崔玉爽, 赵岩松, 等. 一种改进卷积神经网络的教学图像检索方法[J]. 西安电子科技大学学报, 2019, 46(3):52-58. |
| LIU Daohua, CUI Yushuang, ZHAO Yansong, et al. Method for Retrieving the Teaching Image Based on the Improved Convolutional Neural Network[J]. Journal of Xidian University, 2019, 46(3):52-58. | |
| [2] | 杨军, 王顺, 周鹏. 基于深度体素卷积神经网络的三维模型识别分类[J]. 光学学报, 2019, 39(4):314-324. |
| YANG Jun, WANG Shun,Zhou Peng.Recognition and Classification for Three-Dimensional Model Based on Deep Voxel Convolution Neural Network[J]. Acta Optica Sinica, 2019, 39(4):314-324. | |
| [3] | QI C R, HAO S, MO K, et al. PointNet:Deep Learning on Point Sets for 3D Classification and Segmentation[C]// Proceedings of the 30th IEEE Conference on Computer Vision and Pattern Recognition.Piscataway:IEEE, 2017:77-85. |
| [4] | QI C R, YI L, SU H, et al. PointNet++:Deep Hierarchical Feature Learning on Point Sets in a Metric Space[C]// Proceedings of the 31st International Conference on Neural Information Processing Systems. New York: ACM, 2017:5105-5114. |
| [5] | 葛道辉, 李洪升, 张亮, 等. 轻量级神经网络架构综述[J]. 软件学报, 2020, 31(9):2627-2653. |
| GE Daohui, LI Hongsheng, ZHANG Liang, et al. Survey of Lightweight Neural Network[J]. Journal of Software, 2020, 31(9):2627-2653. | |
| [6] | 闫林, 刘凯, 段玫妤. 一种用于点云分类的轻量级深度神经网络[J]. 西安电子科技大学学报, 2020, 47(2):46-53. |
| YAN Lin, LIU Kai, DUAN Meiyu.Lightweight Deep Neural Network for Point Cloud Classification[J]. Journal of Xidian University, 2020, 47(2):46-53. | |
| [7] | 白静, 司庆龙, 秦飞巍. 轻量级实时点云分类网络LightPointNet[J]. 计算机辅助设计与图形学学报, 2019, 31(4):612-621. |
| BAI Jing, SI Qinglong, QIN Feiwei. Lightweight Real-Time Point Cloud Classification Network LightPointNet[J]. Journal of Computer-Aided Design & Computer Graphics, 2019, 31(4):612-621. | |
| [8] |
LI M, Hu Y, ZHAO N, et al. LPCCNet:A Lightweight Network for Point Cloud Classification[J]. IEEE Geoscience and Remote Sensing Letters, 2019, 16(6):962-966.
doi: 10.1109/LGRS.2018.2889472 |
| [9] |
ZHANG M, YOU H X, KADAM P, et al. PointHop:An Explainable Machine Learning Method for Point Cloud Classification[J]. IEEE Transactions on Multimedia, 2020, 22(7):1744-1755.
doi: 10.1109/TMM.2019.2963592 |
| [10] |
KUO CC J, ZHANG M, LI S, et al. Interpretable Convolutional Neural Networks via Feedforward Design[J]. Journal of Visual Communication and Image Representation, 2019, 60:346-359.
doi: 10.1016/j.jvcir.2019.03.010 |
| [11] | ZHANG M, WANG Y F, KADAM P, et al. Pointhop++:A Lightweight Learning Model on Point Sets for 3D Classification (2020)[J/OL].[2020-05-23]. https://arxiv.org/abs/2002.03281. |
| [12] | WANG Y, SUN Y, LIU Z, et al. Dynamic Graph CNN for Learning on Point Clouds[J]. ACM Transactions on Graphics, 2019, 38(5):1-12. |
| [13] |
LIU W, SUN J, LI W, et al. Deep Learning on Point Clouds and Its Application:A Survey[J]. Sensors, 2019, 19(19):4188.
doi: 10.3390/s19194188 |
| [14] | LAN S, YU R, YU G, et al. Modeling Local Geometric Structure of 3D Point Clouds Using Geo-CNN[C]// Proceedings of the 2019 IEEE Conference on Computer Vision and Pattern Recognition.Piscataway:IEEE, 2019:998-1008. |
| [15] | SU H, MAJI S, KALOGERAKIS E, et al. Multi-View Convolutional Neural Networks for 3D Shape Recognition[C]// Proceedings of the IEEE International Conference on Computer Vision.Piscataway:IEEE, 2015:945-953. |
| [16] | JOHNS E, LEUTENEGGER S, DAVISON A J. Pairwise Decomposition of Image Sequences for Active Multi-View Recognition[C]// Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition.Piscataway:IEEE, 2016:3813-3822. |
| [17] | WU Z, SONG S, KHOSLA A, et al. 3D ShapeNets:A Deep Representation for Volumetric Shapes[C]// Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition.Piscataway:IEEE, 2015:1912-1920. |
| [18] | BROCK A, LIM T, RITCHIE J M, et al. Generative and Discriminative Voxel Modeling with Convolutional Neural Networks (2016)[J/OL].[2016-08-16]. https://arxiv.org/abs/1608.04236. |
| [19] | MATURANA D, SCHERER S. Voxnet:A 3D Convolutional Neural Network for Real-Time Object Recognition[C]// IEEE/RSJ International Conference on Intelligent Robots and Systems.Piscataway:IEEE, 2015:922-928. |
| [20] |
ZHI S F, LIU Y X, LI X, et al. Towards Real-Time 3D Object Recognition:A Lightweight Volumetric CNN Framework Using Multitask Learning[J]. Computers & Graphics, 2018, 71:199-207.
doi: 10.1016/j.cag.2017.10.007 |
| [21] | HEGDE V, ZADEH R. FusionNet:3D Object Classification Using Multiple Data Representations (2016)[J/OL].[2018-06-15]. https://arxiv.org/abs/1607.05695. |
| [22] | ZHANG K, HAO M, WANG J, et al. Linked Dynamic Graph CNN:Learning on Point Cloud via Linking Hierarchical Features (2019)[J/OL].[2019-08-06]. https://arxiv.org/abs/1904.10014. |
| [23] | BEN-SHABAT Y, LINDENBAUM M, FISCHER A. 3D Point Cloud Classification and Segmentation Using 3D Modified Fisher Vector Representation for Convolutional Neural Networks (2017)[J/OL], [2017-11-12]. https://arxiv.org/abs/1711.08241. |
| [24] | LIU X, HAN Z, LIU Y S, et al. Point2Sequence: Learning the Shape Representation of 3D Point Clouds with An Attention-Based Sequence to Sequence Network[C]// Proceedings of the AAAI Conference on Artificial Intelligence.Hawaii:AAAI, 2019:8778-8785. |
| [1] | YU Haoyang,YIN Liang,LI Shufang,LV Shun. Recognition algorithm for the little sample radar modulation signal based on the generative adversarial network [J]. Journal of Xidian University, 2021, 48(6): 96-104. |
| [2] | CHEN Changchuan,WANG Haining,HUANG Lian,HUANG Tao,LI Lianjie,HUANG Xiangkang,DAI Shaosheng. Facial expression recognition based on local representation [J]. Journal of Xidian University, 2021, 48(5): 100-109. |
| [3] | SONG Jianfeng,MIAO Qiguang,WANG Chongxiao,XU Hao,YANG Jin. Multi-scale single object tracking based on the attention mechanism [J]. Journal of Xidian University, 2021, 48(5): 110-116. |
| [4] | ZHANG Yuhao,CHENG Peitao,ZHANG Shuhao,WANG Xiumei. Lightweight image super-resolution with the adaptive weight learning network [J]. Journal of Xidian University, 2021, 48(5): 15-22. |
| [5] | SUN Yanjing,WEI Li,ZHANG Nianlong,YUN Xiao,DONG Kaiwen,GE Min,CHENG Xiaozhou,HOU Xiaofeng. Person re-identification method combining the DD-GAN and Global feature in a coal mine [J]. Journal of Xidian University, 2021, 48(5): 201-211. |
| [6] | ZHOU Peng,YANG Jun. Semantic segmentation of remote sensing images based on neural architecture search [J]. Journal of Xidian University, 2021, 48(5): 47-57. |
| [7] | YANG Yunhang,MIN Lianquan. Multi-scalefusion sketch recognition model by dilated convolution [J]. Journal of Xidian University, 2021, 48(5): 92-99. |
| [8] | HUI Haisheng,ZHANG Xueying,WU Zelin,LI Fenglian. Method for stroke lesion segmentation using the primary-auxiliary path attention compensation network [J]. Journal of Xidian University, 2021, 48(4): 200-208. |
| [9] | WANG Ping,JIANG Yuze,ZHAO Guanghui. Object detection based on the multiscale location Enhancement network [J]. Journal of Xidian University, 2021, 48(3): 85-90. |
| [10] | GUO Zekun,TIAN Long,HAN Ning,WANG Penghui,LIU Hongwei,CHEN Bo. Radar HRRP based few-shot target recognition with CNN-SSD [J]. Journal of Xidian University, 2021, 48(2): 7-14. |
| [11] | DONG Xinfeng,ZHANG Wenzheng,XU Chunxiang. 8 bits lightweight S-box with the Feistel structure [J]. Journal of Xidian University, 2021, 48(1): 69-75. |
| [12] | CHENG Lei,WANG Yue,TIAN Chunna. Residual attention mechanism for visual tracking [J]. Journal of Xidian University, 2020, 47(6): 148-157. |
| [13] | DANG Jisheng,YANG Jun. 3D model recognition and segmentation based on multi-feature fusion [J]. Journal of Xidian University, 2020, 47(4): 149-157. |
| [14] | KONG Xin,CHEN Gang,GONG Guoliang,LU Huaxiang,Mao Wenyu. High performance multiply-accumulator for the convolutional neural networks accelerator [J]. Journal of Xidian University, 2020, 47(4): 55-63. |
| [15] | LI Kunlun,ZHANG Lu,XU Hongke,SONG Huansheng. Waveletdomain dilated network for fast low-dose CT image reconstruction [J]. Journal of Xidian University, 2020, 47(4): 86-93. |
|