Electronic Science and Technology ›› 2019, Vol. 32 ›› Issue (6): 58-63.doi: 10.16180/j.cnki.issn1007-7820.2019.06.012
Previous Articles Next Articles
ZHAO Wei,ZENG Guohui,HUANG Bo,ZHU Shuangxin,LIU Jin
Received:2018-07-11
Online:2019-06-15
Published:2019-07-01
Supported by:CLC Number:
ZHAO Wei,ZENG Guohui,HUANG Bo,ZHU Shuangxin,LIU Jin. 3D Space Path Planning Research Based on Improved Local Search Algorithm[J].Electronic Science and Technology, 2019, 32(6): 58-63.
Figure 1.
Schematic diagram of the solution model"
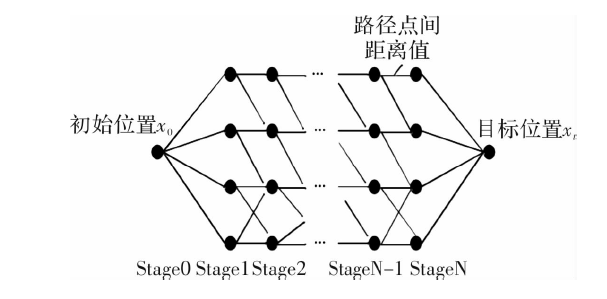
Figure 2.
Spatial point dispersion"
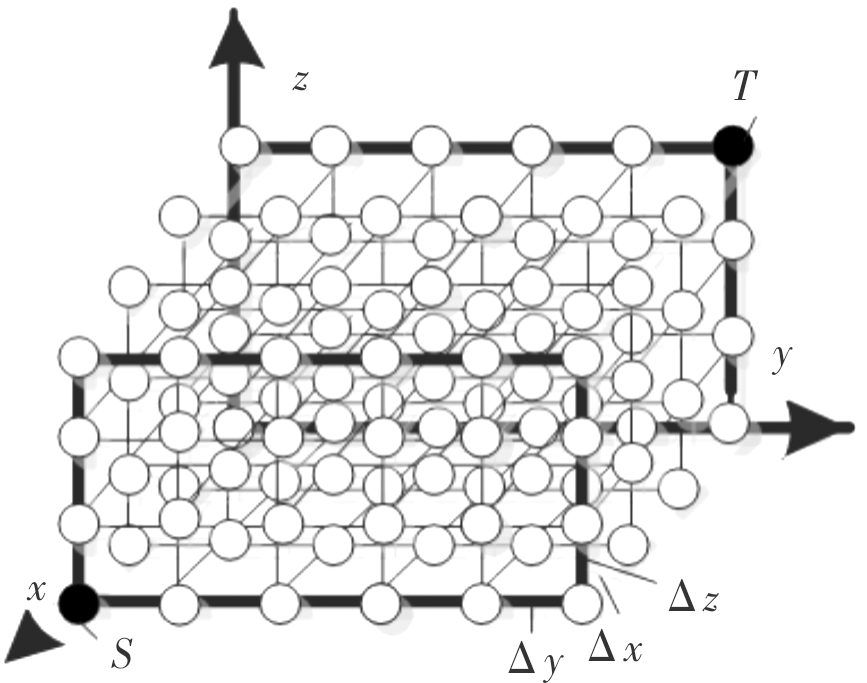

Figure 3.
Searchable areas"
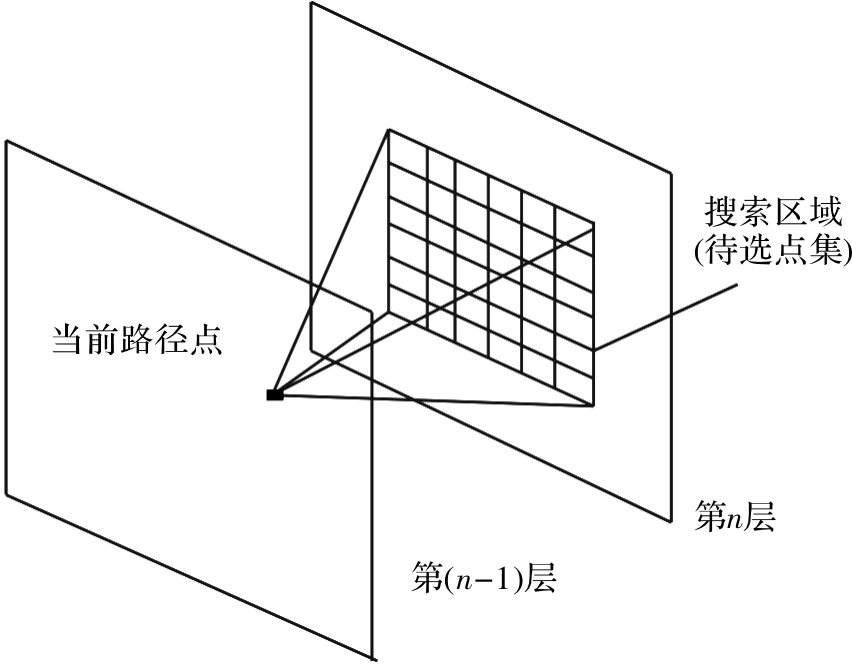
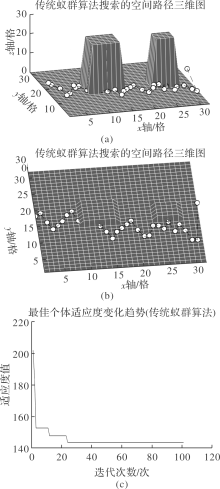
Figure 4.
Path iterative search optimization"
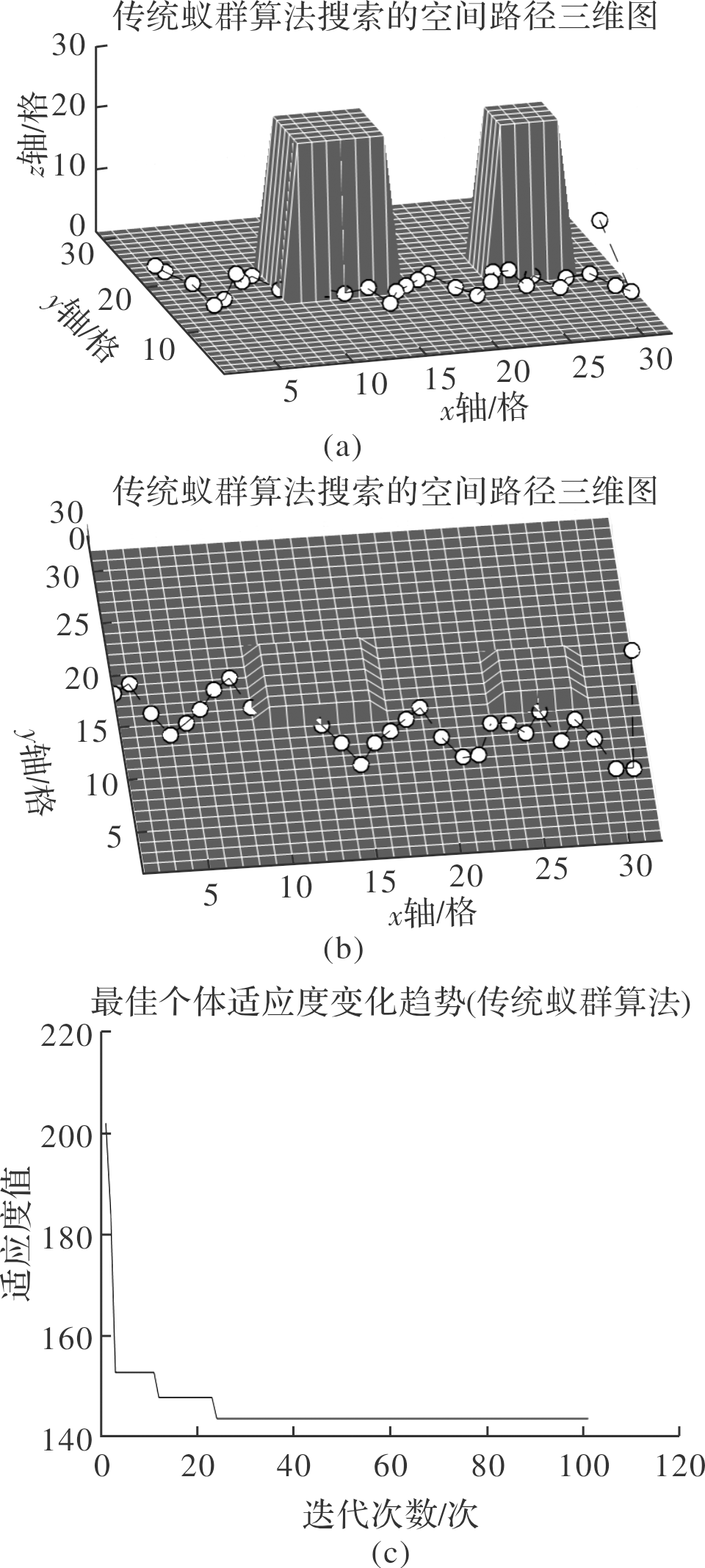
Figure 5.
Traditional ant colony algorithm (a)3D diagram of path planning (b)Top view of path planning (c)Fitness"
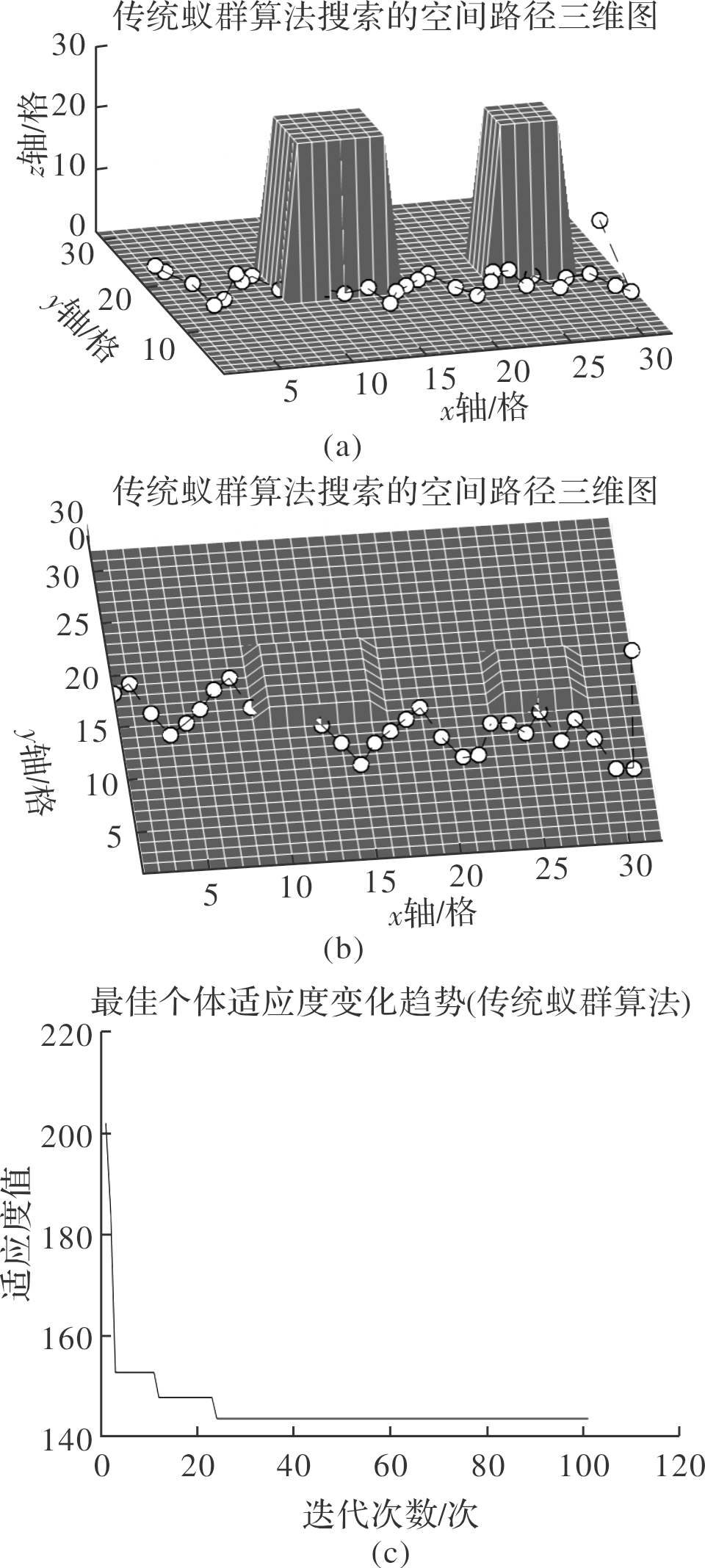
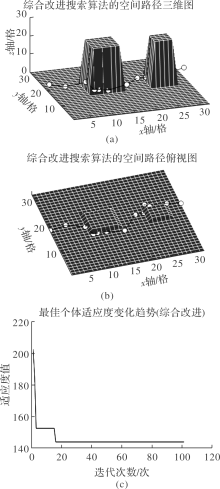
Figure 6.
Improved ant colony algorithm based on heuristic function optimization (a)3D diagram of path planning(b)Top view of path planning(c)Fitness"
Figure 7.
Comprehensive improved search algorithm based on local search and ant colony algorithm (a)3D diagram of path planning(b)Top view of path planning(c)Fitness"

Table 1
Initialize parameter Settings"
| 参数 | 传统蚁群 算法 | 改进蚁群 算法 | 综合改进 搜索算法 |
|---|---|---|---|
| 起始点坐标和目标点坐标 | 起始点(0,18,5) 目标点(32,19,5) | ||
| P:信息素初值 | 1 | 1 | 1 |
| ξ:局部信息素挥发系数 | 0.5 | 0.5 | 0.5 |
| ρ:全局信息素挥发系数 | 0.9 | 0.9 | 0.9 |
| α1:引力因子重要程度 | - | 1 | 1 |
| α2:障碍因子重要程度 | - | 1 | 1 |
| α3:距离因子重要程度 | - | 1 | 1 |
| α4:信息素因子重要程度 | 2 | 2 | 2 |
| dm:障碍物极限距离 | - | 1 | 1 |
| d0:斥力作用距离 | - | 2 | 2 |
| l:蚂蚁批次 | 100 | 100 | 100 |
| ζ(i):阀值 | - | - | 1 |
| ymax(搜索区域) | 3 | 3 | 3 |
| hmax(搜索区域) | 3 | 3 | 3 |
Table 2
Comparison of fitness results"
| 传统蚁群算法 | 改进的蚁群算法 | 基于局部搜索算法和蚁群算法 综合搜索算法 |
|---|---|---|
| 143.71 | 171.14 | 144.27 |
| [1] |
Rubio F, Abu-Dakka F J, Valero F ,et al.Comparing the efficiency of five algorithms applied to path planning for industrial robots[J]. Industrial Robot:An International Journal, 2012,39(6):580-591.
doi: 10.1108/01439911211268787 |
| [2] |
Dasgupta B, Gupta A, Singla E . A variational approach to path planning for hyper-redundant manipulators[J]. Robotics and Autonomous Systems, 2009,57(2):194-201.
doi: 10.1016/j.robot.2008.05.001 |
| [3] | Ananthanarayanan, Hariharan S . Complete path planni ng of higher DOF manipulators in human like envir onments[D].Dayton:University of Dayton. Electrical Engineering, 2015. |
| [4] | 武雅杰, 杨晶东 . 基于A~*算法的机器人路径规划[J]. 电子科技, 2017,30(6):124-127. |
| Wu Yajie, Yang Jingdong . Robot path planning based on A~* algorithm[J]. Electronic Science and Technology, 2017,30(6):124-127. | |
| [5] | 胡荟, 蔡秀珊 . 基于改进蚁群算法的三维空间机器人路径规划[J]. 计算机系统应用, 2011,20(11):95-98. |
| Hu Hui, Cai Xiushan . 3D robot path planning based on improved ant colony algorithm[J]. Application of Computer System, 2011,20(11):95-98. | |
| [6] | 刘利强, 于飞, 戴运桃 . 基于蚁群算法的水下潜器三维空间路径规划[J].系统仿真学报, 2008(14):3712-3716. |
| Liu Liqiang, Yu Fei, Dai Yuntao . Three-dimensional space path planning of water submersible based on ant colony algorithm[J].Journal of System Simulation, 2008(14):3712-3716. | |
| [7] | 张文强 . 6 kg工业机器人路径规划及运动仿真研究[D]. 合肥:合肥工业大学, 2017. |
| Zhang Wenqiang . Research on path planning and motion simulation of 6 kg industrial robot[D]. Heifei:Hefei University of Technology, 2017. | |
| [8] | 刘方洁 . 基于分组与局部搜索的大规模全局优化新算法[D]. 西安:西安电子科技大学, 2017. |
| Liu Fangjie . New large-scale global optimization algorithm based on grouping and local search[D]. Xi’an:Xidian University, 2017. | |
| [9] | Secara C, Vladareanu L . Iterative strategies for obstacle avoidance of a redundant manipulator[J].WSEAS Transactions on Mathematics, 2010(7):1129-1137. |
| [10] | 沈黎明 . 基于启发式搜索方法的机器人三维空间路径规划研究[D]. 秦皇岛:燕山大学, 2014. |
| Shen Liming . Research on robot 3D spatial path planning based on heuristic search method[D]. Qinhuangdao:Yanshan University, 2014. | |
| [11] |
丁家如, 杜昌平, 赵耀 , 等. 基于改进人工势场法的无人机路径规划算法[J]. 计算机应用, 2016,36(1):287-290.
doi: 10.11772/j.issn.1001-9081.2016.01.0287 |
|
Ding Jiaru, Du Changping, Zhao Yao , et al. Uav path planning algorithm based on improved artificial potential field method[J]. Computer Application, 2016,36(1):287-290.
doi: 10.11772/j.issn.1001-9081.2016.01.0287 |
|
| [12] |
Lin J S, Wang C H . Enhancement of the gobal convergence of using iterative dynamic programming to solve optimal control problems[J]. Industrial and Engineering Chemistry Research, 1998,37(9):2469-2478.
doi: 10.1021/ie970629j |
| [13] | 徐达, 蔡满春, 陈悦 . 基于改进Floyd算法的城市交通网络最短路径规划[J]. 电子科技, 2017,30(7):17-20. |
| Xu Da, Cai Manchun, Chen Yue . Urban traffic network shortest path planning based on improved Floyd algorithm[J]. Electronic Science and Technology, 2017,30(7):17-20. | |
| [14] | 林保蛟, 华云松, 顾岩秀 . 双足行走机器人运动轨迹规划[J]. 电子科技, 2017,30(2):45-48. |
| Lin Baojiao, Hua Yunsong, Gu Yanxiu . Motion trajector planning of biped walking robot[J]. Electronic Science and Technology, 2017,30(2):45-48. | |
| [15] | Schneider H C, Wahrburg J . Robot surgery[M]. Berlin:Intech, 2010. |
| [16] |
卜新苹, 苏虎, 邹伟 , 等. 基于复杂环境非均匀建模的蚁群路径规划[J]. 机器人, 2016,38(3):276-284.
doi: 10.13973/j.cnki.robot.2016.0276 |
|
Bu Xinping, Su Hu, Zou Wei , et al. Ant colony path planning based on heterogeneous modeling of complex environment[J]. Robot, 2016,38(3):276-284.
doi: 10.13973/j.cnki.robot.2016.0276 |
|
