Electronic Science and Technology ›› 2019, Vol. 32 ›› Issue (9): 5-9.doi: 10.16180/j.cnki.issn1007-7820.2019.09.002
Previous Articles Next Articles
LIU Xuefang,ZENG Guohui,HUANG Bo,LU Dunke
Received:2018-08-30
Online:2019-09-15
Published:2019-09-19
Supported by:CLC Number:
LIU Xuefang,ZENG Guohui,HUANG Bo,LU Dunke. Research on Path Planning of Mobile Robot Based on Improved Ant Colony Algorithm[J].Electronic Science and Technology, 2019, 32(9): 5-9.
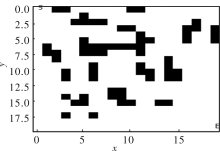
Figure 1.
Environmental modeling"
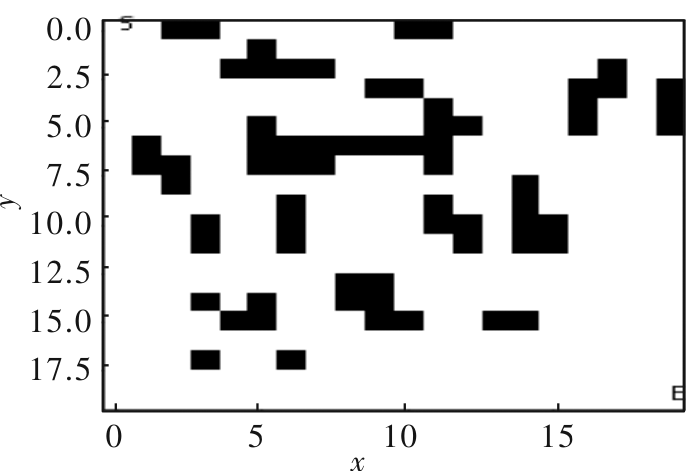
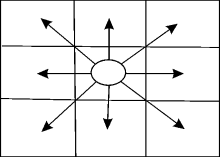
Figure 2.
Robot movable direction"
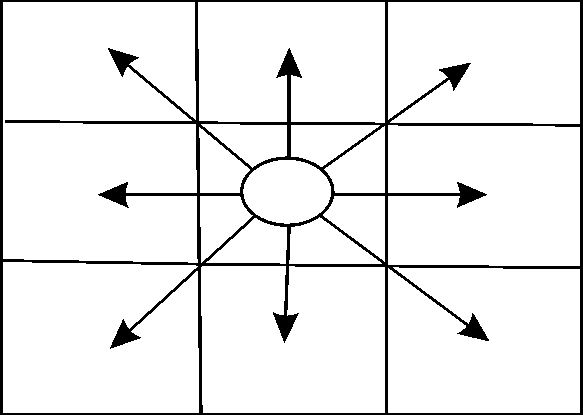
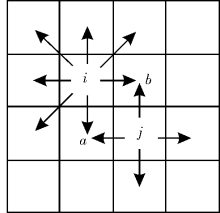
Figure 3.
Pheromone diffusion direction of diagonally movement"

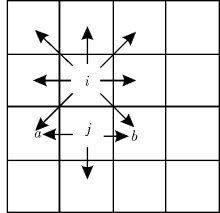
Figure 4.
Pheromone diffusion direction of vertical movement"
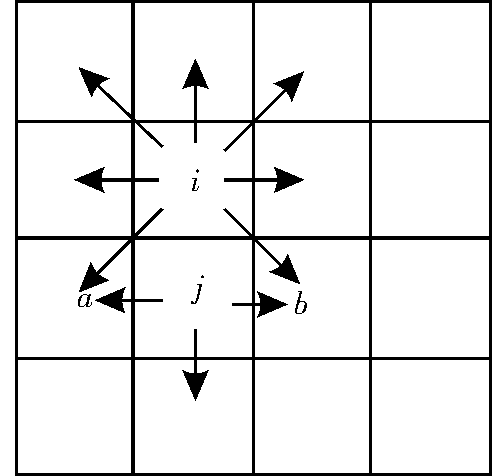
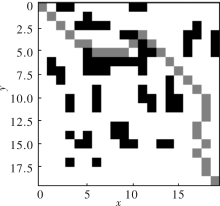
Figure 5.
Path simulation of traditional algorithm path simulation"
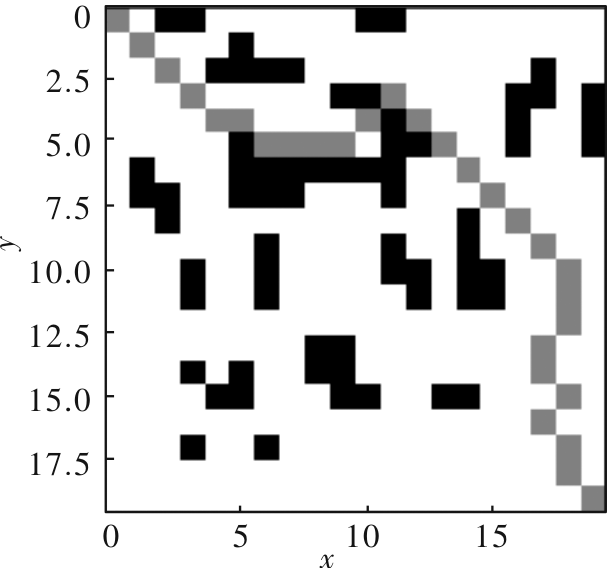
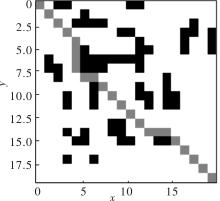
Figure 6.
Path simulation of improved algorithm"
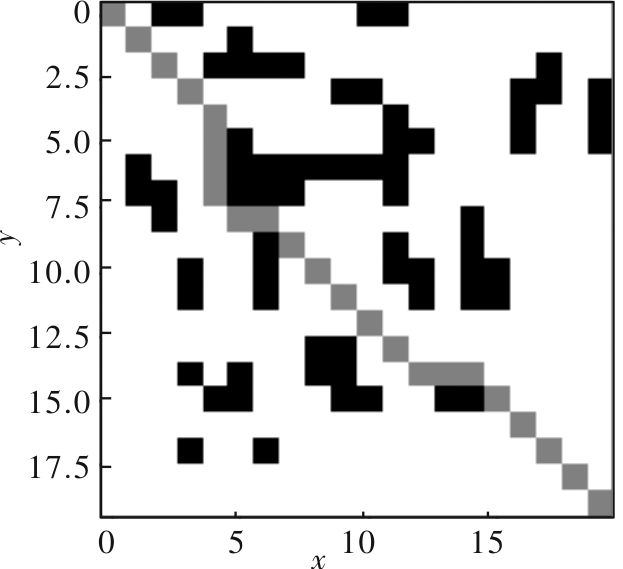
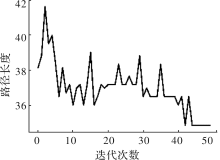
Figure 7.
Iteration graph of traditional algorithm"
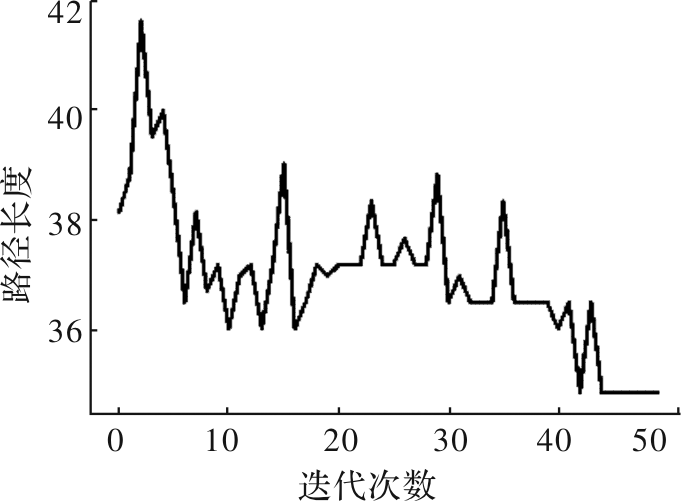
Figure 8.
Iteration graph of improved algorithm"
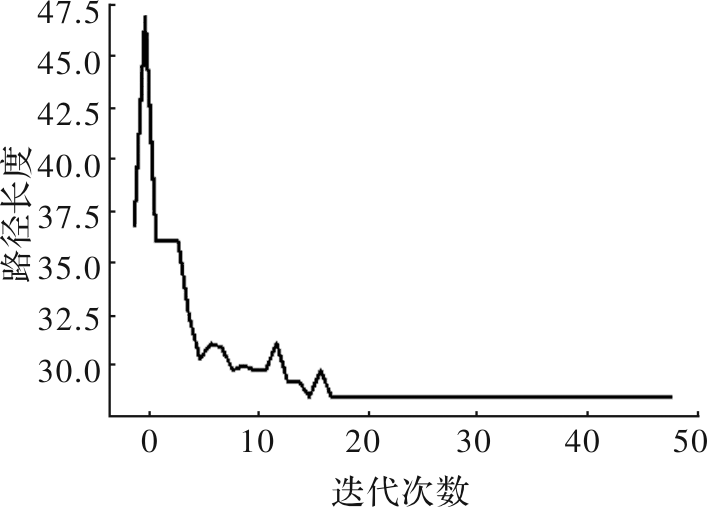
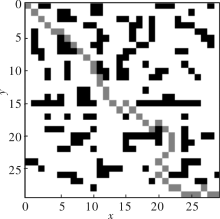
Figure 9.
Path simulation of traditional algorithm"
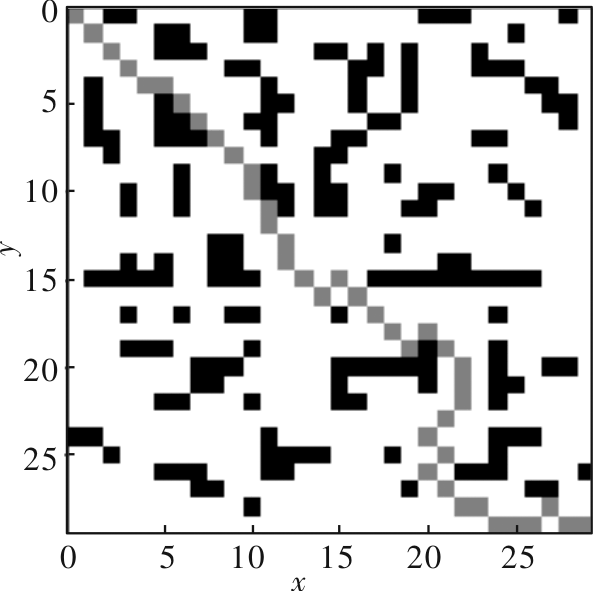
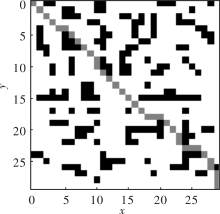
Figure 10.
Path simulation of improved algorithm"
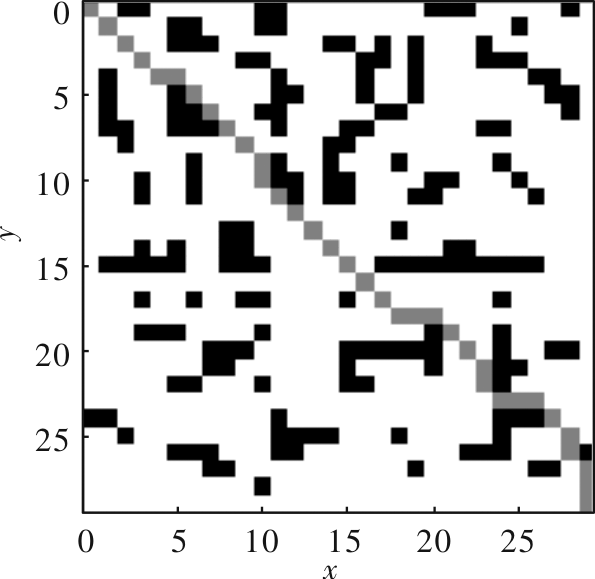
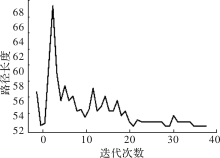
Figure 11.
Iteration graph of traditional algorithm"
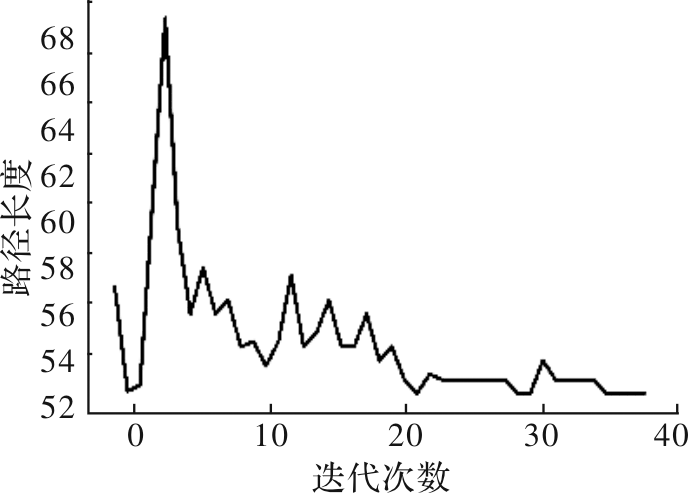
Figure 12.
Iteration graph of improved algorithm"
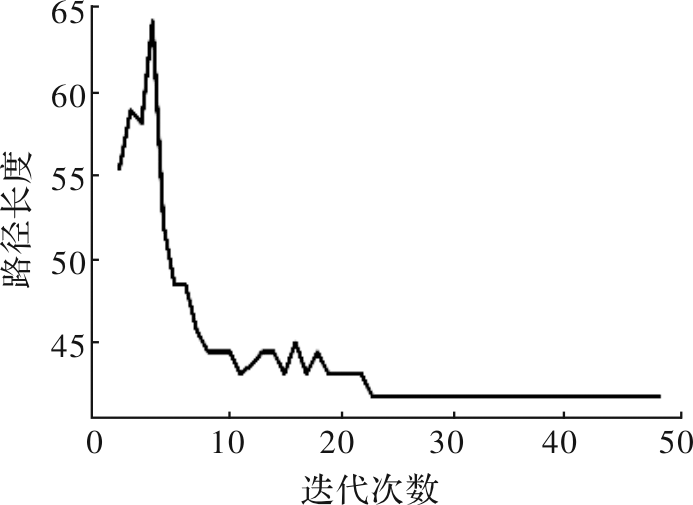
Table 1
Comparison of two algorithm data"
| 地图模型 | 性能指标 | 传统蚁群算法 | 改进蚁群算法 |
|---|---|---|---|
20×20 | 最优路径长度 | 34.870 | 28.627 |
| 最佳迭代次数 | 44 | 18 | |
30×30 | 最优路径长度 | 52.426 | 43.941 |
| 最佳迭代次数 | 38 | 23 |
| [1] | Chi Tsun Cheng, Kia Fallahi, Henry Leung, et al. An AUVs path planner using genetic algorithms with a deterministic crossover operator [C].Anchorage:IEEE International Conference on Robotics and Automation, 2010. |
| [2] | 庄晓东, 孟庆春, 高云 , 等 .复杂环境中基于人工势场优化算法的最优路径规划[J].机器人, 2003, 25(6): 531:535. |
| Zhuang Xiaodong, Meng Qingchun, Gao Yun , et al. Optimal path planning based on artificial potential field optimization algorithm in complex environment[J].Robot, 2003, 25(6): 531:535. | |
| [3] |
于振中, 闫继宏, 赵杰 , 等. 改进人工势场法的移动机器人路径规划[J]. 哈尔滨工业大学学报, 2011,43(1):50-55.
doi: 10.11918/j.issn.0367-6234.2011.01.011 |
|
Yu Zhenzhong, Yan Jihong, Zhao Jie , et al. Mobile robot path planning based on improved artificial potential field method[J]. Journal of Harbin Institute of Technology, 2011,43(1):50-55.
doi: 10.11918/j.issn.0367-6234.2011.01.011 |
|
| [4] | 李善寿, 方潜生, 肖本贤 , 等. 全局路径规划中基于改进可视图法的环境建模[J]. 华东交通大学学报, 2008,25(6):73-77. |
| Li Shanshou, Fang Qiansheng, Xiao Benxian , et al. Environmental modeling based on improved viewable method in global path planning[J]. Journal of East China Jiaotong University, 2008,25(6):73-77. | |
| [5] | Wei H C, Saputra A A, Kubota N. A neuro-based network for on-line topological map building and dynamic path planning[C]. Anchorage:International Joint Conference on Neural Networks. |
| [6] | 张成, 凌有铸, 陈孟元 . 改进蚁群算法求解移动机器人路径规划[J]. 电子测量与仪器学报, 2016,30(11):1758-1764. |
| Zhang Cheng, Ling Youzhu, Chen Mengyuan . Improved ant colony algorithm for solving mobile robot path planning[J]. Journal of Electronic Measurement and Instrument, 2016,30(11):1758-1764. | |
| [7] | 杜博, 夏春蕾, 戴曙光 . 融合改进蚁群算法和粒子群算法的路径搜索应用[J]. 电子科技, 2016,29(9):4-6. |
| Du Bo, Xia Chunlei, Dai Shuguang . Path search application based on improved ant colony algorithm and particle swarm optimization[J]. Electronic Science and Technology, 2016,29(9):4-6. | |
| [8] | Hu Y, Yang S X . A knowledge based genetic algorithm for path planning of a mobile robot[J]. Acta Electronica Sinica, 2006,34(5):911-914. |
| [9] | Taharwa I A, Sheta A, Weshah M A . A mobile robot path planning using genetic algorithm in static environment[J]. Journal of Computer Science, 2008,4(4):341-344. |
| [10] | Phung M D, Cong H Q, Dinh T H , et al. Enhanced discrete particle swarm optimization path planning for UAV vision-based surface inspection[J]. Automation in Construction, 2017,81(6):25-33. |
| [11] | Zhao J P, Gao X W, Liu J G, , et al. Research of path planning for mobile robot based on improved ant colony optimization algorithm [C].Shenyang:International Conference on Advanced Computer Control, 2010. |
| [12] | Huang Q, Zheng G . Route optimization for autonomous container truck based on rolling window[J]. International Journal of Adv Robot System, 2016: 13(3):112-121. |
| [13] | 徐瑾 . 基于改进蚁群算法的移动机器人路径规划研究[D]. 保定:华北电力大学, 2011. |
| Xu Jin . Research on path planning of mobile robot based on improved ant colony algorithm[D]. Baoding:North China Electric Power University, 2011. | |
| [14] | 方春城, 孙培明 . 基于改进蚁群算法的机器人路径规划[J].测控技术, 2018(4):28-31. |
| Fang Chuncheng, Sun Peiming . Robot path planning based on improved ant colony algorithm[J].Measurement and Control Technology, 2018(4):28-31. | |
| [15] | Koren Y, Borenstein J. Potential field methods and their inherent limitations for mobile robot navigation [C]. Sacramento:IEEE International Conference on Robotics and Automation, 1991. |
| [16] | 刘波 . 蚁群算法改进及应用研究[D]. 秦皇岛:燕山大学, 2010. |
| Liu Bo . Improvement and application research of ant colony algorithm[D]. Qinhuangdao:Yanshan University, 2010. | |
| [17] | 张晨, 游晓明 . 基于栅格模型机器人路径规划的量子蚁群算法[J]. 电子科技, 2016,29(7):1-3. |
| Zhang Chen, You Xiaoming . Quantum ant colony algorithm based on grid model robot path planning[J]. Electronic Science and Technology, 2016,29(7):1-3. |
| [1] | YE Hengchao,CHENG Zongmao. Research on Charging Method of Sensor Network Based on Relay Multi-Hop Model [J]. Electronic Science and Technology, 2021, 34(8): 31-36. |
| [2] | SHUI Jiusheng,WANG Ran. A On-Demand Multi-Node Priority Charging Scheduling Algorithm [J]. Electronic Science and Technology, 2021, 34(8): 43-49. |
| [3] | LIU Yongjian,ZENG Guohui,HUANG Bo,LI Xiaobin. Research on Robot Path Planning Based on Improved Ant Colony Algorithm [J]. Electronic Science and Technology, 2020, 33(1): 13-18. |
| [4] | MAO Chenyue,WU Pengyong. UAV Path Planning Obstacle Avoidance Algorithm Based on Artificial Potential Field Method [J]. Electronic Science and Technology, 2019, 32(7): 65-70. |
| [5] | HU Huimian. An Improved Path Planning Algorithm With Variable Probability Bidirectional RRT [J]. Electronic Science and Technology, 2019, 32(6): 16-21. |
| [6] | ZHAO Wei,ZENG Guohui,HUANG Bo,ZHU Shuangxin,LIU Jin. 3D Space Path Planning Research Based on Improved Local Search Algorithm [J]. Electronic Science and Technology, 2019, 32(6): 58-63. |
| [7] | YUE Xiu,ZHANG Wei. UAV Path Planning Based on Intelligent Algorithm [J]. Electronic Science and Technology, 2019, 32(2): 9-13. |
| [8] | XIA Lingru,SUN Shouqun. Planning Route for UAV Cooperative Combat [J]. , 2018, 31(1): 4-. |
| [9] | WANG Zhilong,SHEN Jingfeng. Based on The Regional Coverage of Cleaning Robot Path Planning [J]. , 2017, 30(9): 68-. |
| [10] | ZHANG Chen, YOU Xiaoming. Improved Quantum ant Colony Algorithm of Path Planning for Mobile Robot Based on Grid Model [J]. , 2016, 29(7): 1-. |
| [11] | LIAN Xiaoping,WU Zi'an,KANG Huiqiong. Call Admission Control for OFDMA Systems Based on Ant Colony Algorithm [J]. , 2015, 28(6): 48-. |
| [12] | XIE Yunhong,ZHANG Jumei,XIANG Yang. Key Technology for a Real Time Traffic System Based on the Mobile Internet [J]. , 2015, 28(5): 118-. |
| [13] | FENG Weiwei,QIU Jiong. Application of Ant Colony Algorithm in Fire Evacuation Platform [J]. , 2015, 28(4): 13-. |
| [14] | RONG Shaowei. Research of Underwater Autonomous Search Path Planning Based on Improved A* Algorithm [J]. , 2015, 28(4): 17-. |
| [15] | PAN Xiang,TANG Chunhui,ZHANG Renjie. Path Planning of Mobile Robot Based on Shuffled Frog Leaping Algorithm [J]. , 2015, 27(11): 29-. |
|
