Electronic Science and Technology ›› 2019, Vol. 32 ›› Issue (7): 1-5.doi: 10.16180/j.cnki.issn1007-7820.2019.07.001
JI Shengyang,WANG Xudong,XU Xiaozhuo,SUN Weixiang,SHI Kaining
Received:2018-07-08
Online:2019-07-15
Published:2019-08-14
Supported by:CLC Number:
JI Shengyang,WANG Xudong,XU Xiaozhuo,SUN Weixiang,SHI Kaining. Research on Direct Torque Control of Permanent Magnet Synchronous Motor Based on Sliding Mode Control[J].Electronic Science and Technology, 2019, 32(7): 1-5.
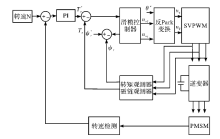
Figure 1.
Block diagram of direct torque control system based on sliding mode control"
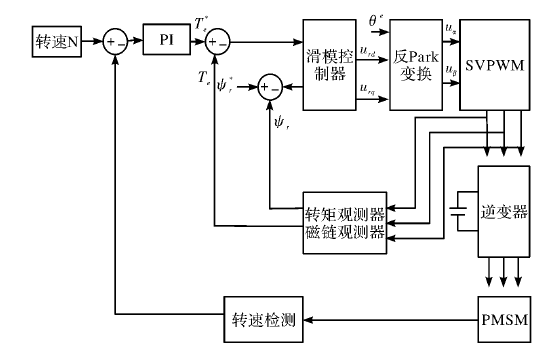

Figure 3.
Simulation results of traditional direct torque control (a)Speed change curve(b)Electromagnetic torque curve"

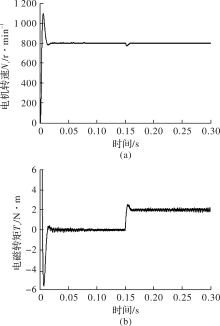
Figure 4.
Simulation results of direct torque control based on sliding mode control (a)Speed change curve(b)Electromagnetic torque curve"
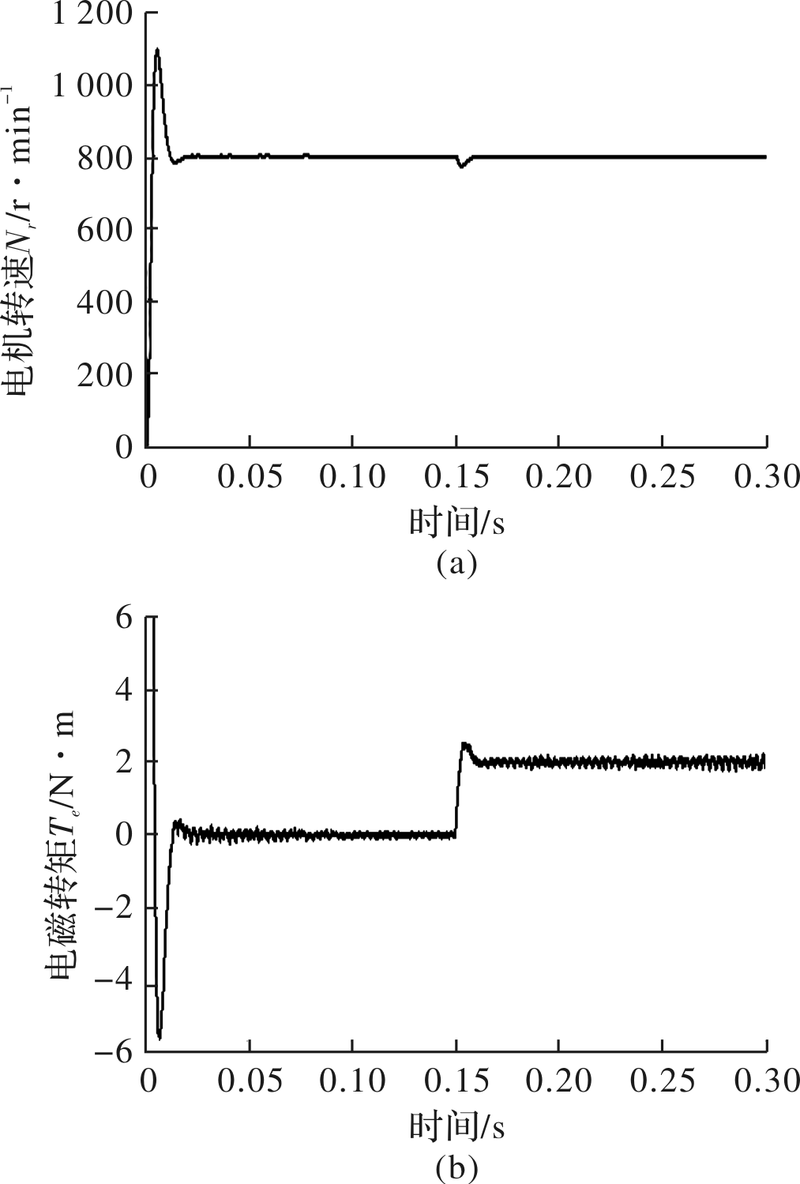
Table 1
Electromagnetic torque ripple"
| 时间 类别 | 0~0.15 s | 0.15~0.3 s |
|---|---|---|
| 传统DTC的 TRIP/N·m | 0.209 | 0.198 |
| 基于滑模控制的DTC的TRIP/N·m | 0.038 | 0.066 |
| [1] | 李少龙, 唐新雯, 李文龙 , 等. 滑模控制的异步电机直接转矩控制系统[J]. 电子科技, 2018,31(2):77-80. |
| Li Shaolong, Tang Xinwen, Li Wenlong , et al. Asynchronous motor direct torque control system based on sliding mode[J]. Electronic Science and Technology, 2018,31(2):77-80. | |
| [2] | 刘京, 李洪文, 邓永停 . 基于新型趋近律和扰动观测器的永磁同步电机滑模控制[J]. 工程科学学报, 2017,39(6):933-944. |
| Liu Jing, Li Hongwen, Deng Yongting . PMSM sliding-mode control based on novel reaching law and disturbance observer[J]. Chinese Journal of Engineering, 2017,39(6):933-944. | |
| [3] | 周胜灵, 刘峰 . 永磁同步电机直接转矩控制系统的改进及仿真[J]. 重庆大学学报, 2013,36(11):87-92. |
| Zhou Shengling, Liu Feng . Improvement and simulation on direct torque control system of permanent magnet synchronous motor[J]. Journal of Chongqing University, 2013,36(11):87-92. | |
| [4] | 刘伟, 张兴华 . IPMSM直接转矩控制系统的建模与仿真[J]. 科技通报, 2017,33(9):159-162. |
| Liu Wei, Zhang Xinghua . Modeling and simulation of direct torque control system of interior permanent magnet synchronous motor[J]. Bulletin of Scientific and Technology, 2017,33(9):159-162. | |
| [5] | 宋争光, 夏长亮, 王志强 , 等. 基于超扭曲算法的永磁同步电机直接转矩控制[J]. 电工技术学报, 2017,32(15):89-99. |
| Song Zhengguang, Xia Changliang, Wang Zhiqiang , et al. Direct torque controlfor permanent magnet synchronous motor using super twisting algorithm[J]. Transactions of China Electrotechnical Society, 2017,32(15):89-99. | |
| [6] | 吕帅帅, 林辉, 李兵强 . 开关频率恒定与占空比调制相结合的PMSM—DTC控制[J]. 电工技术学报, 2016,31(3):72-80. |
| Lü Shuaishuai, Lin Hui, Li Bingqiang . Direct torque control based on simple duty ratio and fixed switching frequency for PMSM[J]. Transactions of China Electrotechnical Society, 2016,31(3):72-80. | |
| [7] | 王勉华, 邢幸 . 开关磁阻电机直接转矩滑模变结构控制[J]. 电机控制与应用, 2017,44(6):35-39. |
| Wang Mianhua, Xing Xing . Sliding mode variable structure controller for direct torque control drive system of switched reluctance motor[J]. Electric Machines & Control Application, 2017,44(6):35-39. | |
| [8] | Wang Ning, Yu Haisheng, Liu Xudong. DTC of induction motor based on adaptive sliding mode control [C]. Shenyang:Chinese Control And Decision Conference, 2018. |
| [9] | 袁雷 . 现代永磁同步电机控制原理及MATLAB仿真[M]. 北京: 北京航空航天大学出版社, 2016. |
| Yuan Lei. Control principle and MATLAB simulation of modern permanent magnet synchronous motor[M]. Beijing: Beijing Aerospace University Press, 2016. | |
| [10] | 吕兴贺, 孔德彪, 胡光 . 基于MATLAB的双三相PMSM建模与仿真[J].微电机, 2017(11):64-67. |
| Lyu Xinghe, Kong Debiao, Hu Guang . Modeling and simulation of dual three-phase PMSM based on MATLAB[J].Micro Motor, 2017(11):64-67. | |
| [11] | 李斌, 关天一 . 电动汽车充电机控制系统建模与滑模变结构控制[J].电机与控制学报, 2018(2):64-70. |
| Li Bin, Guan Tianyi . Modeling and sliding mode control of electric vehicle charger control system[J].Electric Machines and Control, 2018(2):64-70. | |
| [12] | 袁亮, 张斌, 张增华 . 基于滑模变结构的异步电机转速控制系统[J]. 电机与控制应用, 2017,44(1):34-39. |
| Yuan Liang, Zhang Bin, Zhang Zenghua . Speed control system of asynchronous motor based on sliding mode variable structure[J]. Electric Machines & Control Application, 2017,44(1):34-39. | |
| [13] | 李柯洁, 李启升, 张博雅 , 等. 水轮机模糊滑模控制器设计方法[J]. 水利水电科技进展, 2012,32(S2):49-51. |
| Li Kejie, Li Qisheng, Zhang Boya , et al. Design method of fuzzy sliding mode controller for hydraulic turbine[J]. Advances in Science and Technology of Water Resources, 2012,32(S2):49-51. | |
| [14] | 朱琴跃, 刘涛, 李冠华 , 等. 基于滑模控制的牵引变流器网侧有源滤波器电流控制策略[J]. 电源学报, 2017,15(5):116-122. |
| Zhu Qinyue, Liu Tao, Li Guanhua , et al. Current control strategy of active power filter on network side of traction converter based on sliding mode control[J]. Journal of Power Supply, 2017,15(5):116-122. | |
| [15] | 张瑶, 马广富, 郭延宁 , 等. 一种多幂次滑模趋近律设计与分析[J]. 自动化学报, 2016,42(3):466-472. |
| Zhang Yao, Ma Guangfu, Guo Yanning , et al. A multi power reaching law of sliding mode control design and analysis[J]. Acta Automatica Sinica, 2016,42(3):466-472. | |
| [16] | 郝建红, 米昕禾, 汪筱巍 . 交直流联合输电系统中HVDC的自适应全局快速Terminal滑模控制[J]. 电工技术学报, 2017,32(11):8-16. |
| Hao Jianhong, Mi Weihe, Wang Wei . Adaptive global fast Terminal sliding mode control for HVDC in AC-DC parallel transmission system[J]. Transactions of China Electrotechnical Society, 2017,32(11):8-16. |
| [1] | YAN Zhenbin,ZHENG Bochao,ZHOU Zhiyong. Research on Grid Connection of Photovoltaic Power Generation Systems Based on a New Robust Droop Control Method [J]. Electronic Science and Technology, 2021, 34(8): 79-86. |
| [2] | LI Yifei,JIANG Quan. Research Development of Initial Rotor Position Detection of Permanent Magnet Synchronous Motors [J]. Electronic Science and Technology, 2021, 34(4): 24-33. |
| [3] | ZHOU Tao,JIANG Quan. Overview of Sensorless Control Technology for Full Speed Range Permanent Magnet Synchronous Motors [J]. Electronic Science and Technology, 2021, 34(4): 59-69. |
| [4] | JIANG Kaiwen,JIN Hai,XU Shen. Design and Simulation of High Power Factor PMSM without Electrolytic Capacitor [J]. Electronic Science and Technology, 2021, 34(12): 13-18. |
| [5] | TONG Zhaojing,ZHENG Quan,HAN Yaofei,HE Guofeng,QIN Zini. A Novel Sliding Mode Observer for Position Sensorless Control of Permanent Magnet Synchronous Motor [J]. Electronic Science and Technology, 2021, 34(12): 1-6. |
| [6] | CHEN Shengli,WANG Xinzhang,XU Xiaozhuo. Electromagnetic Simulation Analysis of Permanent Magnet Synchronous Motor Demagnetization Fault [J]. Electronic Science and Technology, 2021, 34(10): 32-37. |
| [7] | CUI Bo,FANG Lingli,JIANG Quan,BI Chao. A Comparative Study of High-Speed Position Sensorless Control Technology in Surface Mounted Permanent Magnet Synchronous Motors [J]. Electronic Science and Technology, 2021, 34(10): 8-10. |
| [8] | ZHU Jun,LI Zihao,LIU Bingchen,MENG Xiangbin,ZHANG Zhe. State Estimation for Permanent Magnet Synchronous Motor Based on Adaptive Interpolation Extended Kalman Filter [J]. Electronic Science and Technology, 2020, 33(5): 66-71. |
| [9] | SHI Xun,YI Yingping,WANG Xiaoli. Research on Flux Weakening Control Technology of Interior Permanent Magnet Synchronous Motor [J]. Electronic Science and Technology, 2020, 33(2): 14-19. |
| [10] | ZHANG Lele,SU Qianmin. Adaptive Sliding Mode Control for Nonlinear Systems with Mismatched Quantization [J]. Electronic Science and Technology, 2020, 33(12): 38-43. |
| [11] | YAO Ying,LI Wei,JIN Hai,GUO Jie. Design of Sensorless Control System for PMSM Based on Luenberger Observer [J]. Electronic Science and Technology, 2020, 33(10): 45-50. |
| [12] | HUANG Song,LI Haijian,SHI Wei. Interior PMSM Sensorless Control Based on Disturbance Observer [J]. Electronic Science and Technology, 2020, 33(1): 57-62. |
| [13] | SUN Ruining,DING Yiming,LIANG Jintao. Deadbeat Direct Torque Control of Permanent Magnet Synchronous Motor Based on Full-Dimensional State Observer [J]. Electronic Science and Technology, 2019, 32(4): 72-76. |
| [14] | JI Chuankun,QIAN Junbing. Vector Control System of PMSM Based on Repetitive Synovial Control [J]. Electronic Science and Technology, 2019, 32(1): 52-57. |
| [15] | LI Shaolong,ZHAO Qin,LI Wenlong,CUI Yue,WANG Fan,MEI Yan. Study on Sliding Mode Control in Threephase SVPWM Inverter [J]. , 2016, 29(6): 124-. |
