Electronic Science and Technology ›› 2020, Vol. 33 ›› Issue (5): 66-71.doi: 10.16180/j.cnki.issn1007-7820.2020.05.011
Previous Articles Next Articles
ZHU Jun,LI Zihao,LIU Bingchen,MENG Xiangbin,ZHANG Zhe
Received:2019-03-14
Online:2020-05-15
Published:2020-06-02
Supported by:CLC Number:
ZHU Jun,LI Zihao,LIU Bingchen,MENG Xiangbin,ZHANG Zhe. State Estimation for Permanent Magnet Synchronous Motor Based on Adaptive Interpolation Extended Kalman Filter[J].Electronic Science and Technology, 2020, 33(5): 66-71.
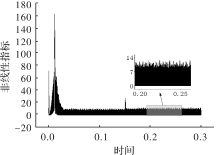
Figure 1.
Model nonlinearity index Υf"
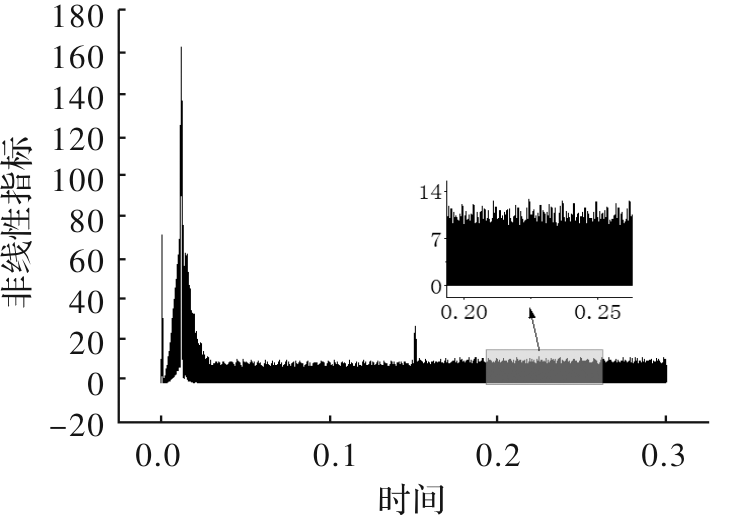
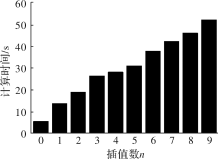
Figure 2.
Calculation time under different interpolation"
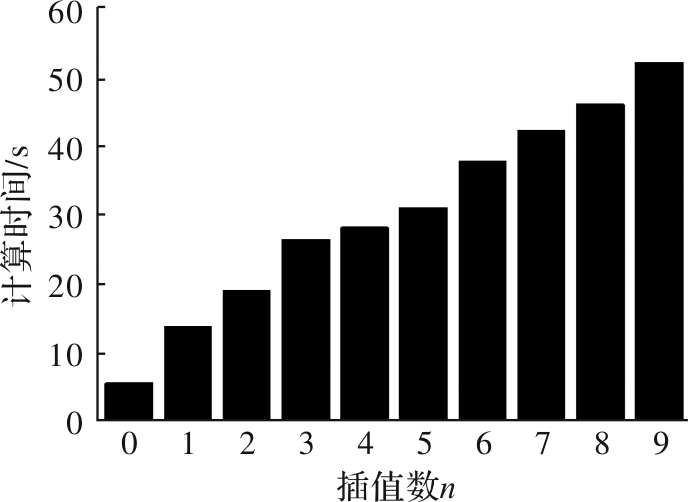
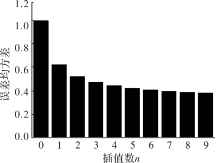
Figure 3.
Error mean square error under different interpolation"
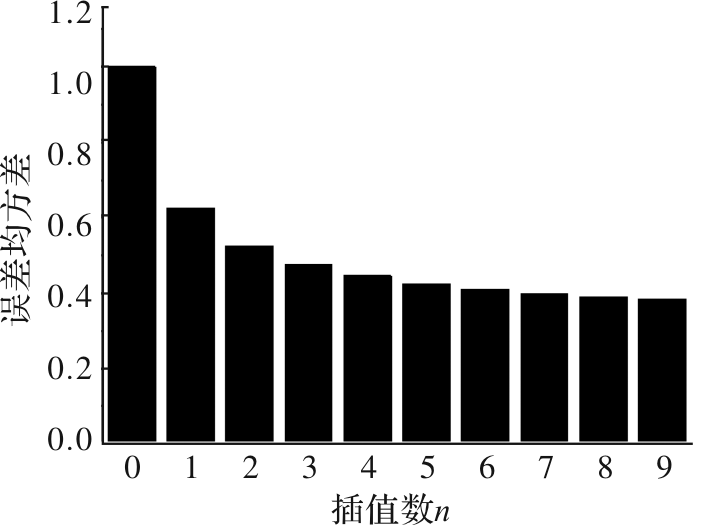
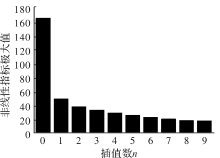
Figure 4.
Nonlinear exponential maximum under different interpolation"
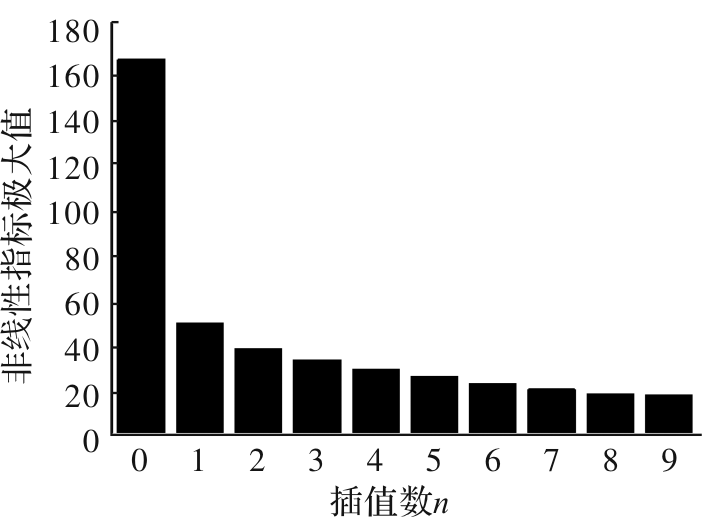
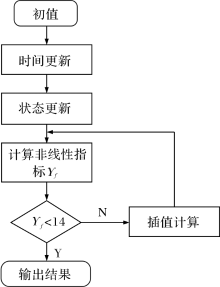
Figure 5.
Algorithm flow chart"
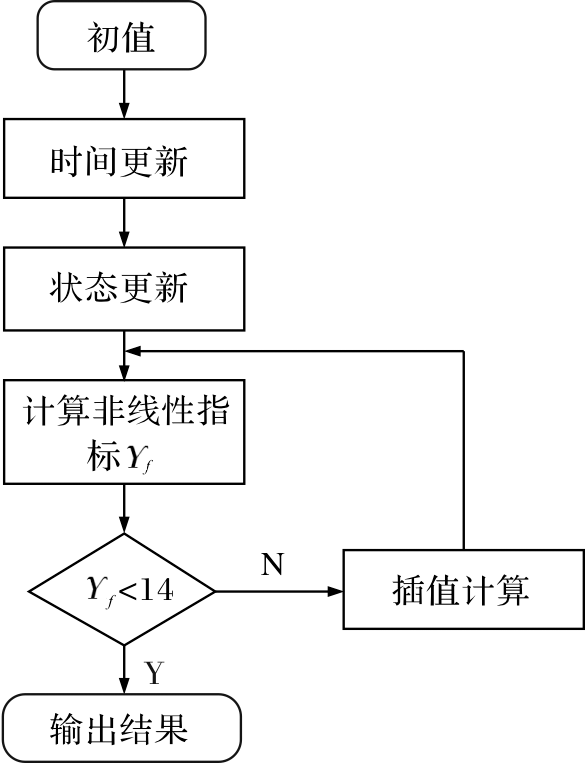
Table 1
Motor model parameters"
| 参数 | 数值 |
|---|---|
| 额定功率/W | 400 |
| 额定电流/A | 2.5 |
| 额定转矩/N·m | 1.27 |
| 额定转速/r·min-1 | 3 000 |
| 定子电阻Rs/Ω | 2.75 |
| 定子电感Ls/mH | 12.54 |
| 磁链幅值ψ/Wb | 0.175 |
| 极对数Pn | 4 |
| 额定电压/V | 220 |
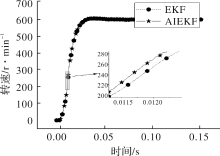
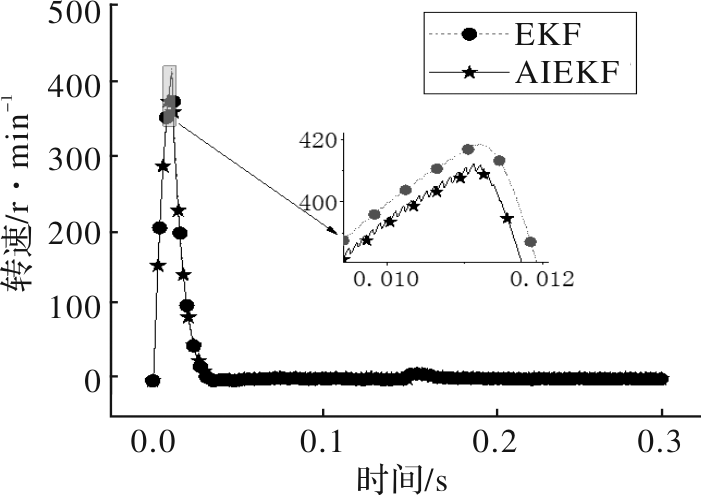
Figure 6.
Comparison of AIEKF and EKF in the start-up phase"
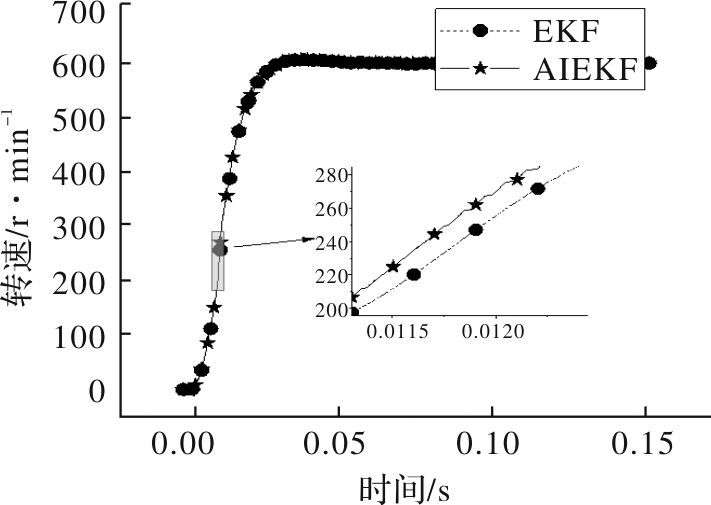
Figure 7.
Comparison of AIEKF and EKF sudden load phase"
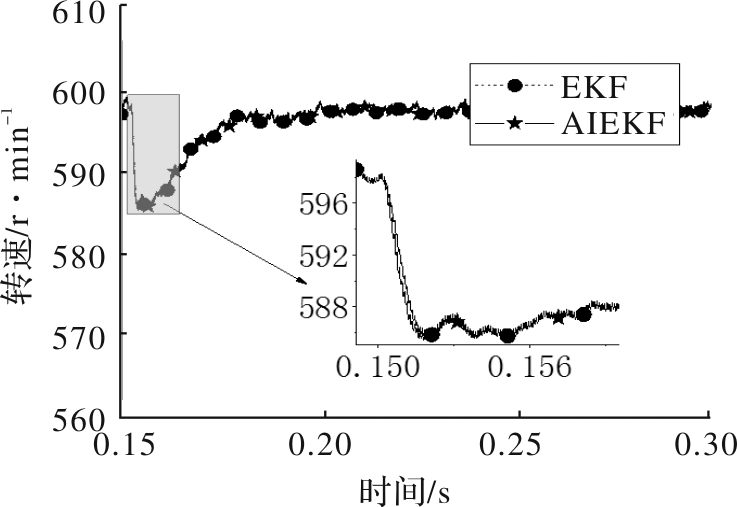
Figure 8.
System speed error before and after interpolation"
| [1] | 贾建兵, 廖嘉伟, 周羽 . 基于EK算法改进的多目标跟踪技术[J]. 电子科技, 2018,31(4):91-94. |
| Jia Jianbing, Liao Jiawei, Zhou Yu . Multitarget tracking technique based on extended kalman algorithm[J]. Electronic Science and Technology, 2018,31(4):91-94. | |
| [2] | 易伯瑜 . 永磁同步电动机高性能无传感器控制技术研究[D]. 广州:华南理工大学, 2014. |
| Yi Boyu . Research on the high-performance sensorless control of PMSM[D]. Guangzhou:South China University of Technology, 2014. | |
| [3] | 艾蔓桐, 孙永辉, 王义 , 等. 基于插值H∞扩展卡尔曼滤波的发电机动态状态估计[J]. 中国电机工程学报, 2018,38(19):5846-5853,5942. |
| Ai Mantong, Sun Yonghui, Wang Yi , et al. Dynamic state estimation for synchronous machines based on interpolation H∞extended Kalmanfilter[J]. Proceedings of the CSEE, 2018,38(19):5846-5853,5942. | |
| [4] | 佘致廷, 邹薇, 董旺华 , 等. 扩展卡尔曼滤波结合前馈补偿永磁同步电机位置估计[J]. 控制理论与应用, 2016,33(10):1312-1318. |
| She Zhiting, Zou Wei, Dong Wanghua , et al. Extended Kalman filters combined with feed-forward compensation for permanent magnet synchronous moter position estimation[J]. Control Theory & Applications, 2016,33(10):1312-1318. | |
| [5] | 孙兴法, 聂子玲, 朱俊杰 , 等. 基于低阶串行双扩展卡尔曼滤波的永磁直线同步电机无速度传感器控制策略[J]. 电工技术学报, 2018,33(12):2685-2694. |
| Sun Xingfa, Nie Ziling, Zhu Junjie , et al. Aspeed sensorless control strategy for a permanent magnet linear synchronous motor based on low-order serial dual extended Kalmanfilters[J]. Transactions of China Electrotechnical Society, 2018,33(12):2685-2694. | |
| [6] | 李英强, 杨明, 龙江 , 等. 基于扩展卡尔曼滤波的永磁同步电机无电流传感器预测控制[J]. 电机与控制应用, 2018,45(1):107-113. |
| Li Yingqiang, Yang Ming, Long Jiang , et al. Currentsensorless predictive control based on extended Kalman filter for PMSM drives[J]. Electric Machines & Control Application, 2018,45(1):107-113. | |
| [7] | 郑大坤, 周云山, 李航洋 , 等. 基于EKF的无传感器永磁同步电机控制器设计[J]. 微电机, 2018,51(1):29-33. |
| Zheng Dakun, Zhou Yunshan, Li Hangyang , et al. Controller design of sensorless permanent magnet synchronous motor based on EKF[J]. Micromotors, 2018,51(1):29-33. | |
| [8] | 曹炎广, 王剑平, 张果 , 等. 基于优化EKF的永磁同步电机转速估计[J]. 微处理机, 2016,37(4):48-51,57. |
| Cao Yanguang, Wang Jianping, Zhang Guo , et al. Speed estimation of permanent magent synchronous motor based on optimized EKF[J]. Microprocessors, 2016,37(4):48-51,57. | |
| [9] | 王志福, 刘明春, 周杨 . 基于模糊扩展卡尔曼滤波的轮毂电机驱动车辆纵向速度估计算法[J]. 西南交通大学学报, 2015,50(6):1094-1099. |
| Wang Zhifu, Liu Mingchun, Zhou Yang . Estimation of longitudinal speed of in-wheel motor driven vehicle using fuzzy extended Kalman filter[J]. Journal of Southwest Jiaotong University, 2015,50(6):1094-1099. | |
| [10] | Esmaeil Ghahremani, Innocent Kamwa . Dynamic state estimation in power system by applying the extended Kalman filter with unknown inputs to phasor measurements[J]. IEEE Transactions on Power Systems, 2011,26(4):2556-2566. |
| [11] | 马彦, 李军伟, 李德芳 , 等. 基于改进无迹卡尔曼滤波的内置式永磁同步电机转子位置估计[J]. 广西大学学报(自然科学版), 2018,43(6):2154-2162. |
| Ma Yan, Li Junwei, Li Defang , et al. Rotor position estimation of interior permanent magnet synchronousmotor based on improved unscented Kalman filter[J]. Journal of Guangxi University(Natural Science Edition), 2018,43(6):2154-2162. | |
| [12] | Arasaratnam I Haykin . Cubature Kalman filtering for continuous-discrete systems: theory and simulations[J]. IEEE Transactions on Signal Processing, 2010,5(10):4977-4993. |
| [13] | 安军, 杨振瑞, 周毅博 , 等. 基于平方根容积卡尔曼滤波的发电机动态状态估计[J]. 电工技术学报, 2017,32(12):234-240. |
| An Jun, Yang Zhenrui, Zhou Yibo , et al. Dynamic state estimator for synchronous-machines based on square root cubature Kalmanfilter[J]. Transactions of China Electrotechnical Society, 2017,32(12):234-240. | |
| [14] | Torabi Hamed, Pariz Naser, Karimpour Ali . A novel cubature statistically linearized Kalman filter for fractional-order nonlinear discrete-time stochastic systems[J]. Journal of Vibration and Contral, 2018,24(24):5880-5897. |
| [15] | 丁家琳 . 容积卡尔曼滤波算法研究及其在电机状态估计中的应用[D]. 成都:西南交通大学, 2015. |
| Ding Jialin . Astudy on cubature Kalman filter with their applications to state estimation of inductor motor[D]. Chengdu:Southwest Jiaotong University, 2015. | |
| [16] | Clarke P, Oconnor R V, Leavy B , et al. Exploring the relationship between software process adaptive capability and organisational performance[J]. IEEE Transactions on Software Engineering, 2015,41(12):1169-1183. |
| [1] | LI Yifei,JIANG Quan. Research Development of Initial Rotor Position Detection of Permanent Magnet Synchronous Motors [J]. Electronic Science and Technology, 2021, 34(4): 24-33. |
| [2] | ZHOU Tao,JIANG Quan. Overview of Sensorless Control Technology for Full Speed Range Permanent Magnet Synchronous Motors [J]. Electronic Science and Technology, 2021, 34(4): 59-69. |
| [3] | JIANG Kaiwen,JIN Hai,XU Shen. Design and Simulation of High Power Factor PMSM without Electrolytic Capacitor [J]. Electronic Science and Technology, 2021, 34(12): 13-18. |
| [4] | TONG Zhaojing,ZHENG Quan,HAN Yaofei,HE Guofeng,QIN Zini. A Novel Sliding Mode Observer for Position Sensorless Control of Permanent Magnet Synchronous Motor [J]. Electronic Science and Technology, 2021, 34(12): 1-6. |
| [5] | CHEN Shengli,WANG Xinzhang,XU Xiaozhuo. Electromagnetic Simulation Analysis of Permanent Magnet Synchronous Motor Demagnetization Fault [J]. Electronic Science and Technology, 2021, 34(10): 32-37. |
| [6] | CUI Bo,FANG Lingli,JIANG Quan,BI Chao. A Comparative Study of High-Speed Position Sensorless Control Technology in Surface Mounted Permanent Magnet Synchronous Motors [J]. Electronic Science and Technology, 2021, 34(10): 8-10. |
| [7] | SHI Xun,YI Yingping,WANG Xiaoli. Research on Flux Weakening Control Technology of Interior Permanent Magnet Synchronous Motor [J]. Electronic Science and Technology, 2020, 33(2): 14-19. |
| [8] | YAO Ying,LI Wei,JIN Hai,GUO Jie. Design of Sensorless Control System for PMSM Based on Luenberger Observer [J]. Electronic Science and Technology, 2020, 33(10): 45-50. |
| [9] | HUANG Song,LI Haijian,SHI Wei. Interior PMSM Sensorless Control Based on Disturbance Observer [J]. Electronic Science and Technology, 2020, 33(1): 57-62. |
| [10] | ZHANG Yu,YAN Tianfeng,XU Fuxin,LI Shuai,ZHENG Li. A New Method Based on Amplitude Weighted Cross-correlation Time Delay Estimation [J]. Electronic Science and Technology, 2019, 32(8): 46-50. |
| [11] | JI Shengyang,WANG Xudong,XU Xiaozhuo,SUN Weixiang,SHI Kaining. Research on Direct Torque Control of Permanent Magnet Synchronous Motor Based on Sliding Mode Control [J]. Electronic Science and Technology, 2019, 32(7): 1-5. |
| [12] | SUN Ruining,DING Yiming,LIANG Jintao. Deadbeat Direct Torque Control of Permanent Magnet Synchronous Motor Based on Full-Dimensional State Observer [J]. Electronic Science and Technology, 2019, 32(4): 72-76. |
| [13] | JI Chuankun,QIAN Junbing. Vector Control System of PMSM Based on Repetitive Synovial Control [J]. Electronic Science and Technology, 2019, 32(1): 52-57. |
| [14] | CHEN Shanzhang,ZHANG Zhendong. Finite Element Analysis of EM Field of Vehicle Drive Motor Based on Ansoft [J]. , 2016, 29(3): 168-. |
| [15] | ZHU Jun,TIAN Miao,LIU Huijun. Whole-Speed Range Rotor Position Measuring Method for Permanent Magnet Synchronous Motor Based on DSP [J]. , 2015, 28(7): 63-. |
|
