Electronic Science and Technology ›› 2019, Vol. 32 ›› Issue (9): 20-25.doi: 10.16180/j.cnki.issn1007-7820.2019.09.005
Previous Articles Next Articles
CHEN Hao1,SHEN Jingfeng1,ZHAO Cheng2
Received:2018-08-27
Online:2019-09-15
Published:2019-09-19
Supported by:CLC Number:
CHEN Hao,SHEN Jingfeng,ZHAO Cheng. The Application of UAV in Emergency Rescue and Disaster Relief[J].Electronic Science and Technology, 2019, 32(9): 20-25.
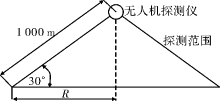
Figure 1.
Detector's effective detection range"

Figure 2.
Contour map of seven earthquake zones"
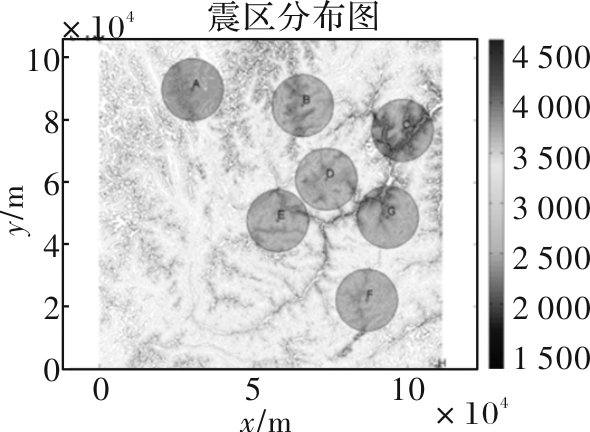

Figure 3.
The first drone cruise map"


Figure 4.
The second drone cruising map"
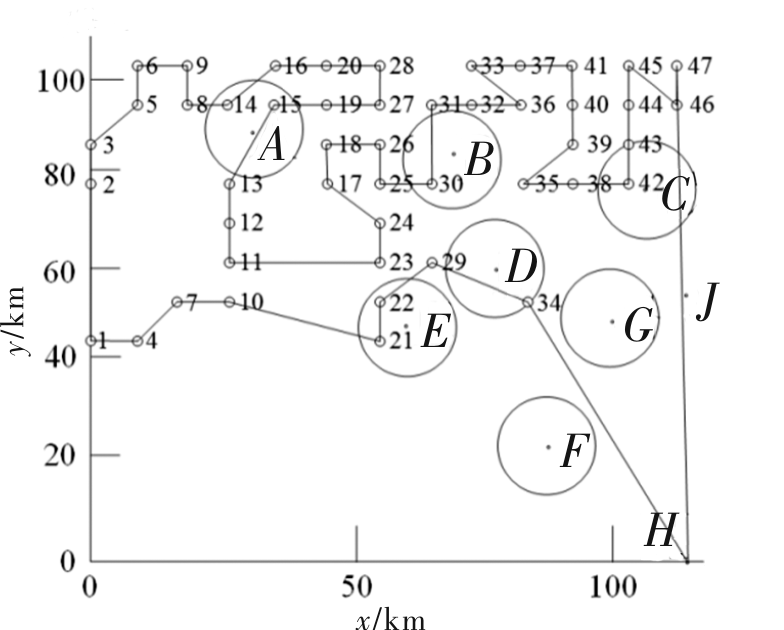
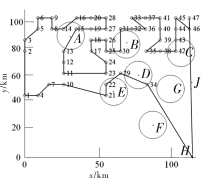
Figure 5.
The third drone cruise chart"
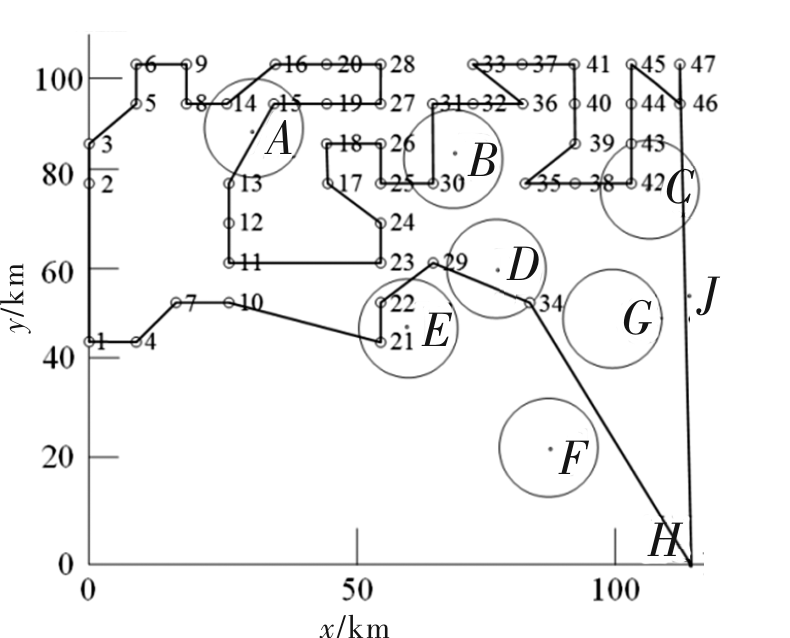

Figure 6.
The fourth drone cruising chart"
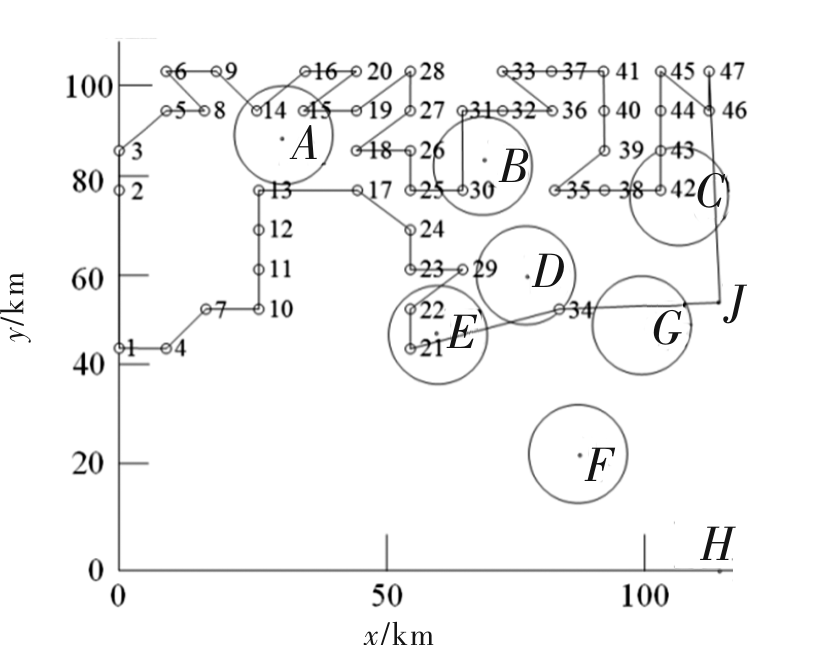
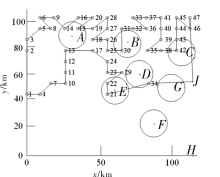
Figure 7.
The fifth drone cruise chart"

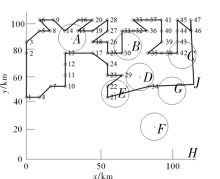
Figure 8.
The sixth drone cruise chart"
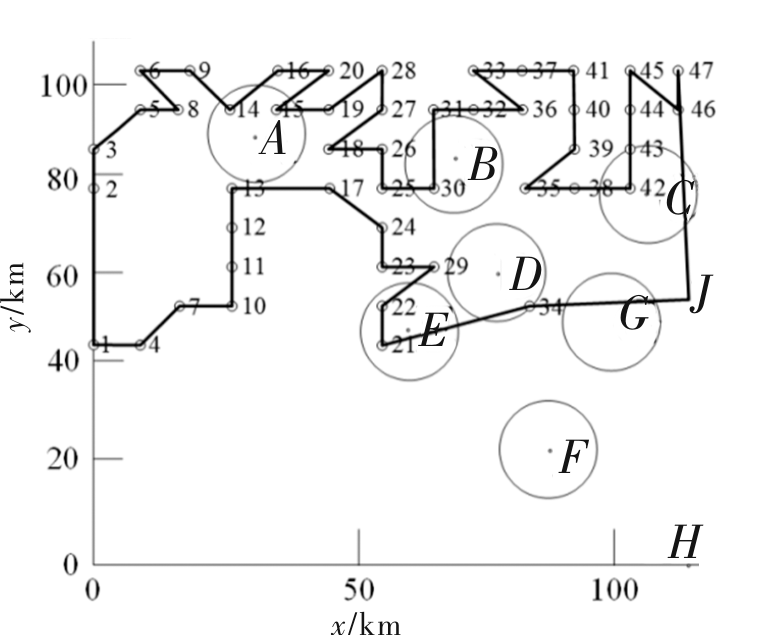
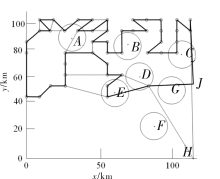
Figure 9.
Six drone group cruise track diagram"
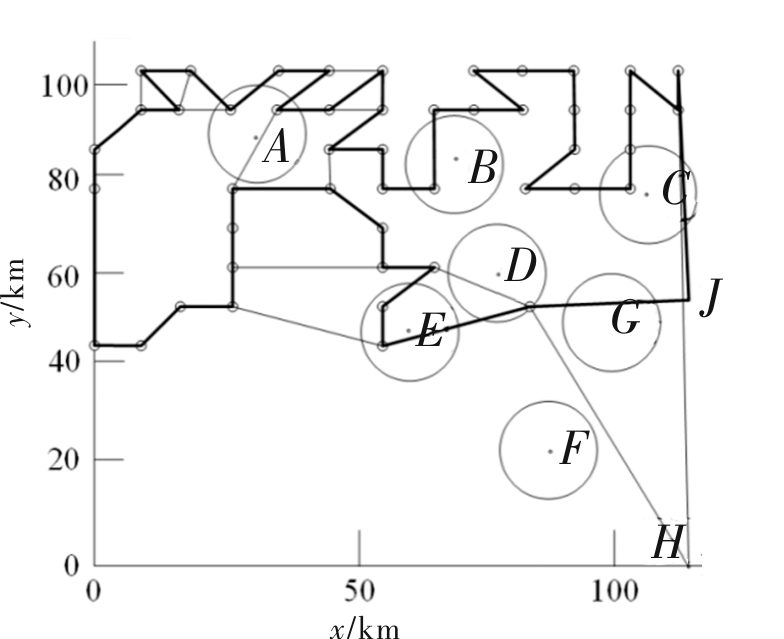
Table 1
Six drone group cruise trajectory feature points"
| 无人机 | 无人机 | 无人机 | |
|---|---|---|---|
| 序号 | 1 | 2 | 3 |
| 行程/km | 682.39 | 682.394 | 682.39 |
| 巡航时间/h | 11.37 | 11.37 | 11.37 |
| 序号 | 4 | 5 | 6 |
| 行程/km | 586.926 | 586.926 | 586.926 |
| 巡航时间/h | 9.782 101 | 9.782 101 | 9.782 101 |

Figure 10.
The first drone optimized cruise map"
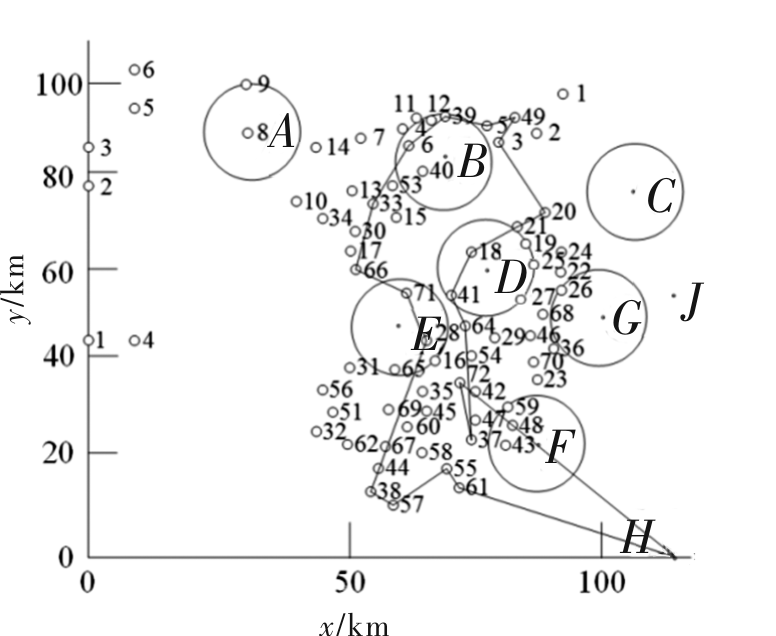
Figure 11.
The second drone optimization cruise map"
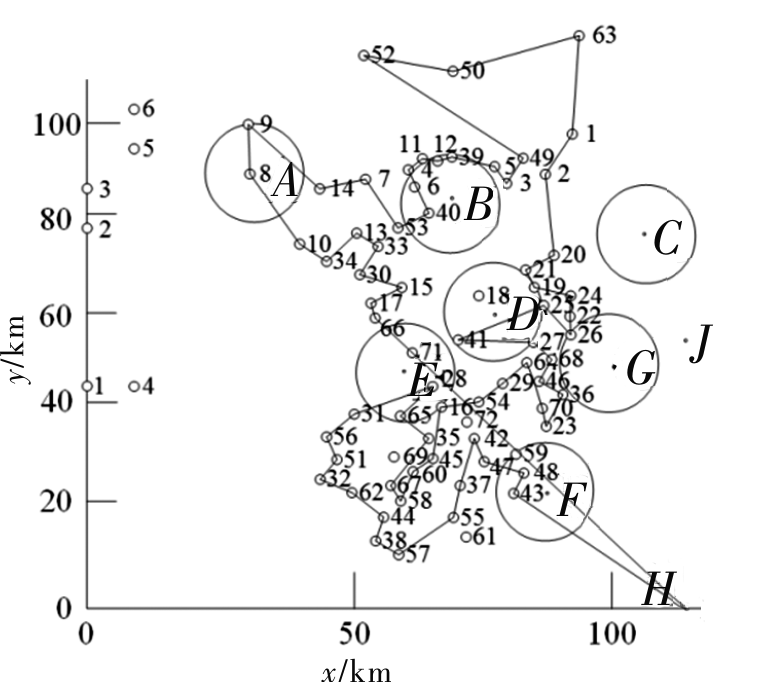

Figure 12.
The third drone optimizes the cruise map"

Table 2
Cruise track of three drones"
| 无人机 | U1 | U2 | U3 |
|---|---|---|---|
| 行程/km | 302.63 | 628.02 | 617.42 |
| 时间/h | 5.04 | 10.47 | 10.30 |
| [1] | 路静 . 微型无人机的应用现状及未来发展[J]. 集成电路应用, 2018,35(4):88-91. |
| Lu Jing . Application status and future development of micro UAV[J]. Applications of IC, 2018 , 35(4):88-91. | |
| [2] | 胡雄超 . 集中式多类型无人机编队任务分配方法研究[D]. 西安:西安电子科技大学, 2013. |
| Hu Xiongchao . Research on task assignment method of centralized multi-type UAV formation[D]. Xi’an: Xidian University, 2013. | |
| [3] | 宗群, 王丹丹, 邵士凯 , 等. 多无人机协同编队飞行控制研究现状及发展[J]. 哈尔滨工业大学学报, 2017,49(3):1-14. |
| Zong Qun, Wang Dandan, Shao Shikai , et al. Research status and development of multi-UAV cooperative formation flying control[J]. Journal of Harbin Institute of Technology, 2017,49(3):1-14. | |
| [4] | Avellar G S C, Pereira G A S, Pimenta L C A , et al. Multi-UAV routing for area coverage and remote sensing with minimum time[J]. Sensors, 2015,15(11):27783-27803. |
| [5] | Liu Xiaofeng, Gao Limei, Guan Zhiwei , et al. A multi-objective optimization model for planning unmanned aerial vehicle cruise route[J]. International Journal of Advanced Robotic Systems, 2016,13(3):1-9. |
| [6] | 徐晓旭 . 无人机巡航阶段轨迹控制研究[D]. 天津:中国民航大学, 2014. |
| Xu Xiaoxu . Research on trajectory control of UAV cruise phase[D]. Tianjin:Civil Aviation University of China, 2014. | |
| [7] | 荣少巍 . 基于改进A*算法的水下航行器自主搜索航迹规划[J]. 电子科技, 2015,28(4):17-19. |
| Rong Shaowei . Underwater navigation autonomous search track planning based on improved A* algorithm[J]. Electronic Science and Technology, 2015,28(4):17-19. | |
| [8] | Niu Shuyun, Zhang Jisheng, Zhang Fan , et al. A method of UAVs route optimization based on the structure of the highway network[J].International Journal of Distributed Sensor Networks, 2015(1):1667-1670. |
| [9] | 欧阳志宏, 桂树 . 无人机固定航路规划与质量评价[J]. 电光与控制, 2018,25(2):1-4. |
| Ouyang Zhihong, Gui Shu . UAV fixed route planning and quality evaluation[J]. Electronics Optics & Control, 2018,25(2):1-4. | |
| [10] | 柏建普, 吴强 . 蚁群混合遗传算法的研究及应用[J]. 电子科技, 2011,24(4):20-23. |
| Bai Jianpu, Wu Qiang . Research and application of ant colony hybrid genetic algorithm[J]. Electronic Science and Technology, 2011,24(4):20-23. | |
| [11] | 郭伟强 . 基于一致性理论的无人机编队控制器设计[D]. 哈尔滨:哈尔滨工业大学, 2013. |
| Guo Weiqiang . Design of UAV formation controller based on consistency theory[D]. Harbin:Harbin Institute of Technology, 2013. | |
| [12] | 刘晓锋, 彭仲仁, 张立业 , 等. 面向交通信息采集的无人飞机路径规划[J]. 交通运输系统工程与信息, 2012,12(1):91-97. |
| Liu Xiaofeng, Peng Zhongren, Zhang Liye , et al. Unmanned aerial vehicle route planning for traffic information collection[J]. Journal of Transportation Systems Engineering and Information Technology, 2012,12(1):91-97. | |
| [13] | Niu Shuyun, Zhang Jisheng, Zhang Fan , et al. A method of UAVs route optimization based on the structure of the highway network[J].International Journal of Distributed Sensor Networks, 2015(1):1667-1670. |
| [14] | 贾广芝 . 基于遗传算法和稀疏A*算法的无人机三维航迹规划研究[D]. 南京:南京邮电大学, 2017. |
| Jia Guangzhi . Research on 3D flight path planning of UAV based on genetic algorithm and sparse A* algorithm[D]. Nanjing:Nanjing University of Posts and Telecommunications, 2017. | |
| [15] | 扬军, 王道波, 渠尊尊 , 等. 基于元胞遗传算法的多无人机编队集结路径规划[J]. 机械与电子, 2018,36(1):26-30. |
| Yang Jun, Wang Daobo, Qu Zunzun , et al. Multi-UAV formation and assembly path planning based on cellular genetic algorithm[J]. Machinery & Electronics, 2018,36(1):26-30. | |
| [16] | 周青, 张锐, 索晓杰 , 等. 具有时间约束的无人机遗传算法航迹规划[J]. 航空计算技术, 2016,46(2):93-96. |
| Zhou Qing, Zhang Rui, Suo Xiaojie , et al. Time-constrained drone genetic algorithm track planning[J]. Aeronautical Computing Technique, 2016,46(2):93-96. | |
| [17] | 黄大伦 . 基于遗传算法的航迹规划的研究与实现[D]. 成都:电子科技大学, 2014. |
| Huang Dalun . Research and implementation of track planning based on genetic algorithm[D]. Chendu:University of Electronic Science and Technology of China, 2014. |
| [1] | JIN Xiao,WU Fei,YAN Song,LU Wenxia,ZHANG Zhongyi. Fingerprint Location Method of Metro Station Based on GAWK-means [J]. Electronic Science and Technology, 2022, 35(2): 34-39. |
| [2] | SHAO Zhihui,YANG Jian,YUAN Tianchen,WU Weijia. Sleeper Diseases Diagnosis Based on Permutation Entropy and Support Vector Machine [J]. Electronic Science and Technology, 2022, 35(2): 52-58. |
| [3] | XIU Xiaobo,LI Boquan,ZHOU Feng. Optimization of Temperature Sensor Location Based on Genetic Algorithm [J]. Electronic Science and Technology, 2021, 34(9): 17-23. |
| [4] | WANG Yang,WANG Yagang. Identification Method Based on Step Response and Genetic Algorithm to Optimize Higher-Order Plus Time-Delay Model [J]. Electronic Science and Technology, 2021, 34(9): 41-46. |
| [5] | DING Jiahui,ZHANG Zhaojun. Adaptive Genetic Algorithm Based on Individual Ordering [J]. Electronic Science and Technology, 2020, 33(3): 6-11. |
| [6] | YANG Zhenyu,FU Yinghua,FU Dongxiang,WANG Yajing. HEs Segmentation of Fundus Images by Multi-algorithm Fusion [J]. Electronic Science and Technology, 2020, 33(11): 24-30. |
| [7] | CHEN Qiang,LIU Jin,YANG Haima,LIU Haishan,WEI Yu. Research on Reactive Power Optimization of Power Distribution Network Based on Improved Genetic Algorithm [J]. Electronic Science and Technology, 2019, 32(5): 11-16. |
| [8] | LI Yapin,ZOU Dexuan,DUAN Na. Optimization of Nonlinear Model Based on GA-BFO Combination Algorithm [J]. Electronic Science and Technology, 2019, 32(5): 16-20. |
| [9] | ZHU Wangchun,CHENG Hao,GAO Haiying. Adaptive Acoustic Emission Noise Elimination and Bearing Fault Diagnosis [J]. Electronic Science and Technology, 2019, 32(4): 16-20. |
| [10] | LI Cunjin,SUN Hong. The Study of Improved Self-adaptive Genetic Algorithm in Association Rules [J]. Electronic Science and Technology, 2019, 32(12): 58-63. |
| [11] | WU Yankai,ZHANG Wei,MA Yingman,LI Jiayang. Two Degree of Freedom PID Parameter Optimization Based on GA-PSO Fusion Algorithm [J]. Electronic Science and Technology, 2019, 32(10): 54-59. |
| [12] | ZHAO Shuguang,CUI Ping,LUO Xiao,LI Zhiwei. Research on the Evolutionary Design and Optimization Method of Reversible Logic Gates Based on NCV Gate Library [J]. , 2017, 30(9): 1-. |
| [13] | ZHAO Huiguang 1,HE Shengxue 1,HUANG Qing 2,XIANG Lejia 3. Study on the Strategy of Bus Evacuation Based on Improved ant Colony Optimization [J]. , 2017, 30(4): 68-. |
| [14] | HU Xiaorui,LUO Yanjie,MAI Yunfei. Application of Genetic Algorithm In Constant Tension Control System [J]. , 2017, 30(4): 72-. |
| [15] | JIN Yanfei, ZHANG Huilin, ZHANG Song, SHI Chaoran, LI Rongwei. Comparison of MPPT Control Methods Based on GABPNN and Perturb & Observe Algorithm [J]. , 2016, 29(8): 145-. |
