Electronic Science and Technology ›› 2022, Vol. 35 ›› Issue (11): 72-79.doi: 10.16180/j.cnki.issn1007-7820.2022.11.011
Previous Articles Next Articles
YANG Jinxian,LIU Pengwei
Received:2021-04-08
Online:2022-11-15
Published:2022-11-11
Supported by:CLC Number:
YANG Jinxian,LIU Pengwei. Calculation Method of Segmented Borehole Trajectory Based on Magnetic Inertia Measurement[J].Electronic Science and Technology, 2022, 35(11): 72-79.
Figure 1.
Flow chart of magnetic inertia-assisted segmented wellbore trajectory calculation method"
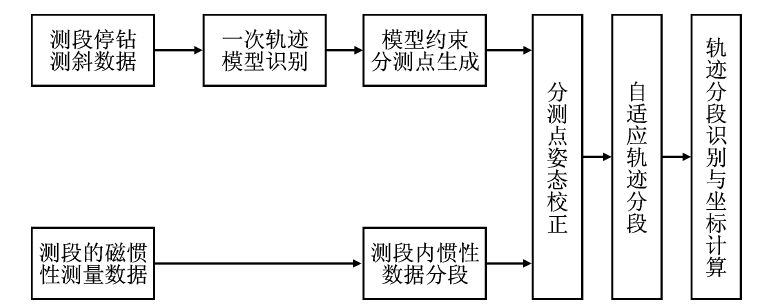
Figure 2.
The unit of measurement while drilling"
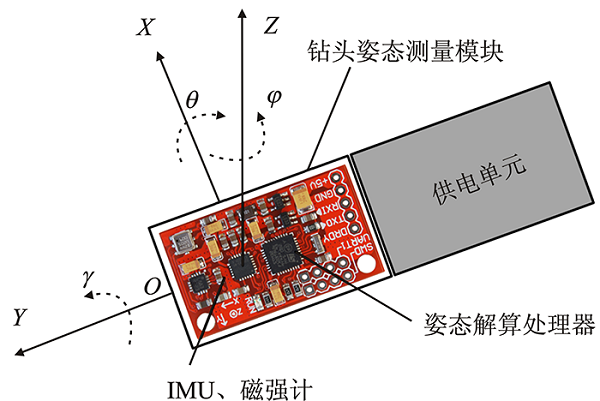
Table 1.
Identification of primary wellbore trajectory model"
| 井深 /m | 井斜角 /(°) | 方位角 /(°) | 工具面角 /(°) | a /(°) | b /(°) | c /(°) |
|---|---|---|---|---|---|---|
| 100 | 10.0 | 30.0 | 24.0 | - | - | - |
| 120 | 18.0 | 39.5 | 22.5 | 22.39 | 26.35 | 15.23 |
| 145 | 27.5 | 44.5 | 15.8 | 15.90 | 18.60 | 12.68 |
| 160 | 33.8 | 49.0 | 8.0 | 9.04 | 9.08 | 6.66 |
| 180 | 42.5 | 56.0 | 14.5 | 14.62 | 15.96 | 11.99 |
| 195 | 50.5 | 67.0 | 16.5 | 16.65 | 17.67 | 15.20 |
| 210 | 56.3 | 60.0 | 350.0 | 350.58 | 352.16 | 348.39 |
| 230 | 47.2 | 52.0 | 333.5 | 333.78 | 333.12 | 335.22 |
| 245 | 38.6 | 41.0 | 332.0 | 331.35 | 332.12 | 335.40 |
| 260 | 46.0 | 34.0 | 330.5 | 330.99 | 328.80 | 333.55 |
| 280 | 51.0 | 30.0 | 329.0 | 328.13 | 327.16 | 330.38 |
Table 2.
Range model difference"
| 井深/m | 自然参数模型 /(°)·m-1 | 圆柱螺线模型 /(°)·m-1 | 空间圆弧模型 /(°)·m-1 |
|---|---|---|---|
| 100 | - | - | - |
| 120 | 5.50 | 192.50 | 363.50 |
| 145 | 4.00 | 112.00 | 124.80 |
| 160 | 69.33 | 72.00 | 89.33 |
| 180 | 6.00 | 73.00 | 125.50 |
| 195 | 10.00 | 78.00 | 86.67 |
| 210 | 38.67 | 144.00 | 107.33 |
| 230 | 14.00 | 19.00 | 86.12 |
| 245 | 43.33 | 8.00 | 226.67 |
| 260 | 32.67 | 113.33 | 203.33 |
| 280 | 43.50 | 92.02 | 69.22 |
Table 3.
Calibration data of sub-survey points for 145~160m survey section"
| 井深 /m | 测点井斜 角/(°) | 测点方位 角/(°) | 校正后井 斜角/(°) | 校正后方 位角/(°) |
|---|---|---|---|---|
| 145.0 | 19.0 | 41.5 | 19.00 | 41.50 |
| 146.2* | 19.3 | 42.0 | 19.32 | 42.61 |
| 147.3* | 19.6 | 42.5 | 19.61 | 43.64 |
| 148.1* | 19.8 | 42.8 | 19.83 | 44.38 |
| 149.0* | 20.1 | 43.2 | 20.07 | 45.21 |
| 149.8* | 20.3 | 43.6 | 20.28 | 45.96 |
| 150.9* | 20.6 | 44.1 | 20.57 | 46.98 |
| 152.0* | 20.9 | 44.5 | 20.87 | 48.34 |
| 153.3* | 21.2 | 45.1 | 21.21 | 47.74 |
| 154.5* | 21.5 | 45.6 | 21.53 | 46.53 |
| 155.5* | 21.8 | 46.1 | 21.80 | 45.98 |
| 156.8* | 22.1 | 46.6 | 22.15 | 45.94 |
| 157.7* | 22.4 | 47.0 | 22.39 | 46.37 |
| 158.6* | 22.6 | 47.4 | 22.63 | 47.14 |
| 159.8* | 22.9 | 47.9 | 22.95 | 48.63 |
| 160.0 | 23.0 | 48.0 | 23.00 | 48.05 |
Table 4.
Calculation of tool surface angle of sub-measuring point"
| 井深 /m | 工具面角 /(°) | 校正后井 斜角/(°) | 校正后方 位角/(°) | a/(°) | b/(°) | c/(°) |
|---|---|---|---|---|---|---|
| 145.0 | 15.80 | 19.000 | 41.500 | - | - | 15.800 |
| 146.2 | 19.83 | 19.320 | 42.614 | 18.493 0 | 15.448 0 | 13.225 0 |
| 147.3 | 26.31 | 19.613 | 43.636 | 27.305 0 | 23.981 0 | 11.929 0 |
| 148.1 | 30.38 | 19.827 | 44.379 | 28.382 0 | 22.894 0 | 15.517 0 |
| 149.0 | 39.84 | 20.067 | 45.214 | 37.837 0 | 35.667 0 | 3.004 0 |
| 149.8 | 38.76 | 20.280 | 45.957 | 38.031 0 | 45.543 0 | 2.023 0 |
| 150.9 | 46.78 | 20.573 | 46.979 | 46.783 0 | 49.705 0 | 15.040 0 |
| 152.0 | 49.76 | 20.867 | 48.340 | 49.758 0 | 54.493 0 | 12.665 0 |
| 153.3 | 310.85 | 21.213 | 47.743 | 319.730 8 | 311.580 6 | 316.120 8 |
| 154.5 | 318.21 | 21.533 | 46.535 | 328.499 0 | 315.543 0 | 322.362 0 |
| 155.5 | 325.42 | 21.800 | 45.980 | 338.415 0 | 320.332 0 | 336.32 1 0 |
| 156.8 | 336.22 | 22.147 | 45.940 | 348.062 0 | 333.137 0 | 343.367 0 |
| 157.7 | 340.41 | 22.387 | 46.366 | 354.032 0 | 342.456 0 | 351.021 0 |
| 158.6 | 17.05 | 22.627 | 47.138 | 19.585 0 | 16.839 0 | 20.195 0 |
| 159.8 | 14.11 | 22.947 | 48.628 | 20.156 0 | 14.787 0 | 16.876 0 |
| 160.0 | 8.00 | 23.000 | 48.052 | 4.363 0 | 8.929 0 | 10.183 0 |
Table 5.
Model difference of survey section"
| 井深/m | a1/(°)· m-1 | b1/(°)· m-1 | c1/(°)· m-1 | a2/(°)· m-1 | b2/(°)· m-1 | c2/(°)· m-1 |
|---|---|---|---|---|---|---|
| 145.0 | - | - | - | - | - | - |
| 146.2 | 1.11 | 3.65 | 5.50 | 1.11 | 3.65 | 5.500 |
| 147.3 | 0.90 | 2.12 | 13.07 | 2.02 | 5.77 | 18.580 |
| 148.1 | 2.50 | 9.36 | 18.58 | 4.52 | 15.13 | 37.160 |
| 149.0 | 2.23 | 4.64 | 40.93 | 6.74 | 19.76 | 78.090 |
| 149.8 | 0.91 | 8.48 | 45.92 | 7.65 | 28.24 | 124.010 |
| 150.9 | 0.15 | 2.66 | 28.85 | 7.80 | 30.90 | 152.860 |
| 152.0 | 0.00 | 4.30 | 33.72 | 7.80 | 35.20 | 186.580 |
| 153.3 | 6.84 | 0.57 | 4.06 | 6.84 | 0.57 | 4.060 |
| 154.5 | 8.57 | 2.22 | 3.46 | 15.41 | 2.79 | 7.520 |
| 155.5 | 13.00 | 5.09 | 10.90 | 28.41 | 7.88 | 18.420 |
| 156.8 | 9.11 | 2.37 | 5.50 | 37.52 | 10.25 | 23.920 |
| 157.7 | 15.14 | 2.27 | 11.79 | 52.65 | 12.52 | 35.710 |
| 158.6 | 2.82 | 0.23 | 3.49 | 55.47 | 12.76 | 39.200 |
| 159.8 | 5.04 | 0.56 | 2.30 | 60.51 | 13.32 | 41.510 |
| 160.0 | 19.44 | 3.40 | 9.665 | 79.94 | 16.72 | 51.173 |
Table 6.
Trajectory calculation results"
| 北坐标增 量/m | 东坐标增 量/m | 地坐标增 量/m | 绝对误差 /m | |
|---|---|---|---|---|
| 参考数据 | 5.236 | 5.582 | 12.911 | 0.000 |
| 本文算法 | 5.354 | 5.656 | 12.806 | 0.146 |
| 单一轨迹模型算法 | 4.746 | 5.014 | 13.288 | 0.840 |
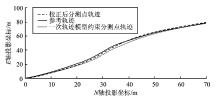
Figure 3.
Horizontal projection of wellbore trajectory"
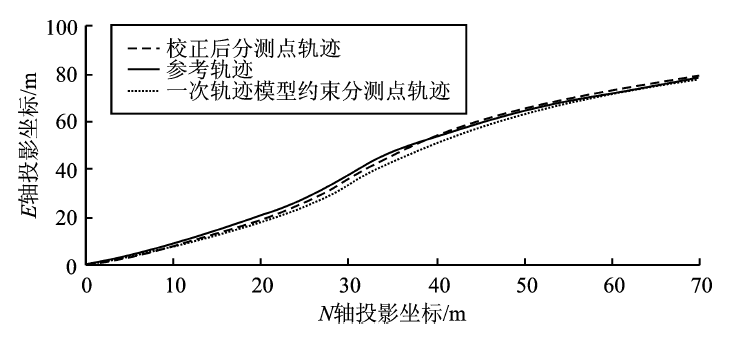
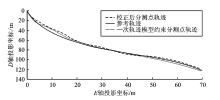
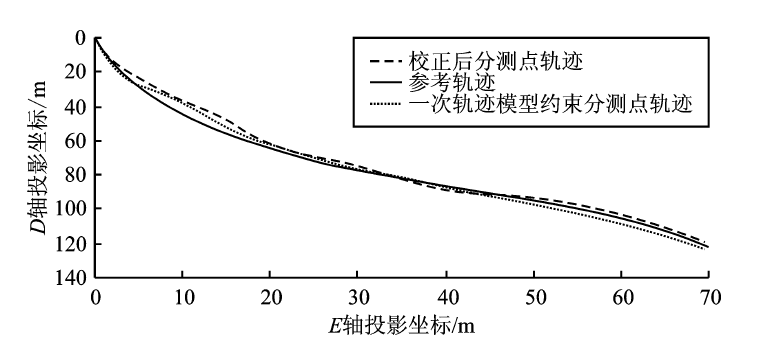
Figure 4.
Vertical projection of wellbore trajectory"
| [1] | 张凯翔, 陈久朋, 熊彬州, 等. 工业机器人空间轨迹仿真分析[J]. 电子科技, 2020, 33(10):26-32. |
| Zhang Kaixiang, Chen Jiupeng, Xiong Binzhou, et al. Spatial trajectory simulation and analysis of industrial robot[J]. Electronic Science and Technology, 2020, 33(10):26-32. | |
| [2] | 林保蛟, 华云松, 顾岩秀. 双足行走机器人运动轨迹规划[J]. 电子科技, 2017, 30(2):45-48. |
| Lin Baojiao, Hua Yunsong, Gu Yanxiu. Motion trajectory planning of biped walking robot[J]. Electronic Science and Technology, 2017, 30(2):45-48. | |
| [3] | 陆自清. 基于卡尔曼滤波的动态地质模型导向方法[J]. 石油钻探技术, 2021, 49(1):113-120. |
| Lu Ziqing. Geosteering methods of dynamic geological model based on Kalman filter[J]. Petroleum Drilling Techniques, 2021, 49(1):113-120. | |
| [4] | 贺学鹏. 随钻测量定向钻进技术在老空水疏放中的应用实践[J]. 能源与节能, 2020(12):183-184. |
| He Xuepeng. Application of MWD directional drilling technology in drainage of goaf water[J]. Energy and Energy Conservation, 2020(12):183-184. | |
| [5] |
刘修善, 王超. 空间圆弧轨迹的解析描述技术[J]. 石油学报, 2014, 35(1):134-140.
doi: 10.7623/syxb201401016 |
|
Liu Xiushan, Wang Chao. Analytical description of spatial-arc wellbore trajectory[J]. Acta Petrolei Sinica, 2014, 35(1):134-140.
doi: 10.7623/syxb201401016 |
|
| [6] | 徐彤, 徐鲲, 和鹏飞, 等. 基于井壁稳定与改造效率的井眼轨迹优化设计[J]. 石油化工应用, 2019, 38(7):59-61. |
| Xu Tong, Xu Kun, He Pengfei, et al. Research on wellbore trajectory optimization design based on wellbore stability and reconstruction efficiency[J]. Petrochemical Industry Application, 2019, 38(7):59-61. | |
| [7] | 李文燕. 复杂井眼轨迹的多目标优化技术研究[D]. 西安: 西安石油大学, 2019. |
| Li Wenyan. Research on multi-objective optimization technology of complex well trajectory[D]. Xi'an: Xi'an Shiyou University, 2019. | |
| [8] | 周平安, 韩姓礼, 张敬周, 等. 基于非等变圆柱螺线模型的井眼轨迹测斜算法研究[J]. 计算机应用与软件, 2015, 32(12):29-33. |
| Zhou Ping'an, Han Xingli, Zhang Jingzhou, et al. Research on wellbore trajectory inclination measurement algorithm based on non-equivariant cylindrical spiral model[J]. Computer Applications and Software, 2015, 32(12):29-33. | |
| [9] |
高佳佳, 邓金根, 闫伟, 等. 基于井壁稳定控制建立井眼轨迹优化预测模型[J]. 石油学报, 2016, 37(9):1179-1186.
doi: 10.7623/syxb201609013 |
|
Gao Jiajia, Deng Jingen, Yan Wei, et al. Well trajectory optimization prediction model based on wellbore stability control[J]. Acta Petrolei Sinica, 2016, 37(9):1179-1186.
doi: 10.7623/syxb201609013 |
|
| [10] | 李辉. 定向井井眼轨道优化技术研究[J]. 中国石油和化工标准与质量, 2021, 41(4):170-172. |
| Li Hui. Study on well trajectory optimization technology for directional wells[J]. China Petroleum and Chemical Standard and Quality, 2016, 37(9):1179-1186. | |
| [11] | 鲁港, 鲍继红. 自然曲线法测斜计算中的数值方法[J]. 石油地质与工程, 2008, 22(1):72-74. |
| Lu Gang, Bao Jihong. Numerical method in calculation of inclinometer with natural curve method[J]. Petroleum Geology and Engineering, 2008, 22(1):72-74. | |
| [12] | 鲁港, 商维斌, 张琼, 等. 最小曲率法测斜计算中的数值方法[J]. 石油工业计算机应用, 2009(3):16-19. |
| Lu Gang, Shang Weibin, Zhang Qiong, et al. The numerical method in incline metry calculation with minimum-curvature method[J]. Computer Application of Petroleum, 2009(3):16-19. | |
| [13] | 许玲, 鲁港, 赵辉. 圆柱螺线法测斜计算中的数值方法[J]. 探矿工程, 2008(5):1-4. |
| Xu Ling, Lu Gang, Zhao Hui. Numerical method for deviational survey by cylinder helix method[J]. Drilling Engineering, 2008, 35(5):1-4. | |
| [14] | 王礼学, 陈卫东, 贾昭清, 等. 井眼轨迹计算新方法[J]. 天然气工业, 2003(S1):57-59. |
| Wamg Lixue, Chen Weidong, Jia Zhaoqing, et al. New hole trajectory calculation method[J]. Natural Gas Industry, 2003(S1):57-59. | |
| [15] |
刘修善, 刘子恒. 井眼轨迹模型的通用格式[J]. 石油学报, 2015, 36(3):366-371.
doi: 10.7623/syxb201503012 |
|
Liu Xiushan, Liu Ziheng. Universal format of borehole trajectory models[J]. Acta Petrolei Scnica, 2015, 36(3):366-371.
doi: 10.7623/syxb201503012 |
|
| [16] |
Wang L, Liu Y M, Wang C Z, et al. Real-time forward modeling and inversion of logging-while-drilling electromagnetic measurements in horizontal wells[J]. Petroleum Exploration and Development, 2021, 48(1):159-168.
doi: 10.1016/S1876-3804(21)60012-5 |
| [17] |
刘修善. 井眼轨迹模式定量识别方法[J]. 石油勘探与开发, 2018, 45(1):145-148.
doi: 10.1016/S1876-3804(18)30014-4 |
|
Liu Xiushan. Quantitative recognition method for borehole trajectory models[J]. Petroleum Exploration and Development, 2018, 45(1):145-148.
doi: 10.1016/S1876-3804(18)30014-4 |
|
| [18] | 李凌云. 导向钻井工具姿态多传感器组合测量方法研究[D]. 西安: 西安石油大学, 2020. |
| Li Lingyun. Research on multi-sensor combined measurement method for steering drilling tool[D]. Xi'an: Xi'an Shiyou University, 2020. | |
| [19] | 乔美英, 王波, 肖学军, 等. 煤矿井下随钻测斜仪误差联合校正方法[J]. 煤田地质与勘探, 2020, 48(2):202-208. |
| Qiao Meiying, Wang Bo, Xiao Xuejun, et al. Joint correction method of errors of MWD inclinometer underground coal mine[J]. Coal Geology and Exploration, 2020, 48(2):202-208. | |
| [20] | 高怡, 程为彬, 汪跃龙. 近钻头钻具多源动态姿态组合测量方法[J]. 中国惯性技术学报, 2017, 25(2):146-150. |
| Gao Yi, Cheng Weibin, Wang Yuelong. Multi-source dynamic attitude combination measurement for near-bit drilling tool[J]. Journal of Chinese Inertial Technology, 2017, 25(2):146-150. | |
| [21] | 国家能源局. SY/T 5435-2012,定向井轨道设计与轨迹计算[S]. 北京: 国家能源局, 2012. |
| National Energy Administration. SY/T 5435-2012,Trajectory design and calculation of directional well[S]. Beijing: National Energy Administration, 2012. |
| [1] | GUO Wei,ZHANG Xuanxiong. UWB/PDR Integrated Indoor Pedestrian Positioning [J]. Electronic Science and Technology, 2022, 35(8): 41-46. |
| [2] | TONG Xiaosen,YANG Jinxian. Drilling Tool Acceleration Denoising Based on GRNN Network Adaptive Filtering [J]. Electronic Science and Technology, 2022, 35(7): 46-51. |
| [3] | DU Peng,BAO Xiaoan,HU Yifei,CHEN Dirong. Research on Spatio-Temporal Data Fusion Algorithm of Wireless Sensor Network Based on Kalman Filter [J]. Electronic Science and Technology, 2022, 35(6): 21-27. |
| [4] | DAI Jiangtao,GAO Bo,WAN Jiajun. Design of DDS Communication Middleware for Resource Limited Devices [J]. Electronic Science and Technology, 2022, 35(5): 47-55. |
| [5] | Sunyun YANG,Xiu KAN. Design of Biological Behavior Analysis System Based on Vision and IMU Sensors [J]. Electronic Science and Technology, 2022, 35(4): 28-34. |
| [6] | HU Wenqiang,HU Jianpeng. WiFi/PDR Fusion Real-Time Localization Algorithm Based on Region Constraint [J]. Electronic Science and Technology, 2022, 35(10): 21-26. |
| [7] | SUN Yangyan,ZHOU Xiuying,REN Zhu. Security State Estimation and Detection for Biasing Attack [J]. Electronic Science and Technology, 2021, 34(12): 75-80. |
| [8] | ZHU Jun,LI Zihao,LIU Bingchen,MENG Xiangbin,ZHANG Zhe. State Estimation for Permanent Magnet Synchronous Motor Based on Adaptive Interpolation Extended Kalman Filter [J]. Electronic Science and Technology, 2020, 33(5): 66-71. |
| [9] | YANG Biao,LIU Xiang,TANG Xian,CHEN Junting. AGV Multi-target Tracking Under Smart Factory [J]. Electronic Science and Technology, 2019, 32(11): 23-27. |
| [10] | CUI Longfei,ZHANG Xing,WU Xiaochao,ZHANG Caikun. An Adaptively Adjusting Improved Algorithm of Trajectory Tracking Based on Current Statistical Model [J]. , 2017, 30(9): 117-. |
| [11] | CHEN Xuan,DONG Shipeng. The Weighted Centroid Localization Algorithm Based on the Modified RSSI Values [J]. , 2017, 30(4): 92-. |
| [12] | YANG Junling. Method of Detecting and Rejecting Outliers in Passive Locating and Tracking [J]. , 2016, 29(6): 51-. |
| [13] | FENG Bin,HE Jianzhong. An Aircraft Gyro Information Acquisition System [J]. , 2015, 28(7): 175-. |
| [14] | TANG Aiping. Linear Mixed Effects State Space Model Based on Monte Carlo Method [J]. , 2015, 28(3): 30-. |
| [15] | XIE Ning,BI Junxi,LOU Xiaoping,ZHU Lianqing. Humanoid Robot Attitude Algorithm Based on Multi-sensor Information Fusion [J]. , 2015, 28(1): 150-. |
|
||
