Electronic Science and Technology ›› 2023, Vol. 36 ›› Issue (6): 27-33.doi: 10.16180/j.cnki.issn1007-7820.2023.06.005
Previous Articles Next Articles
ZHANG Ming,ZHANG Guobao,ZHU Hongwei
Received:2021-12-20
Online:2023-06-15
Published:2023-06-20
Supported by:CLC Number:
ZHANG Ming,ZHANG Guobao,ZHU Hongwei. Three-Dimensional Laser SLAM Method with IMU[J].Electronic Science and Technology, 2023, 36(6): 27-33.

Figure 1.
Lidar and IMU"


Figure 2.
Algorithm framework"
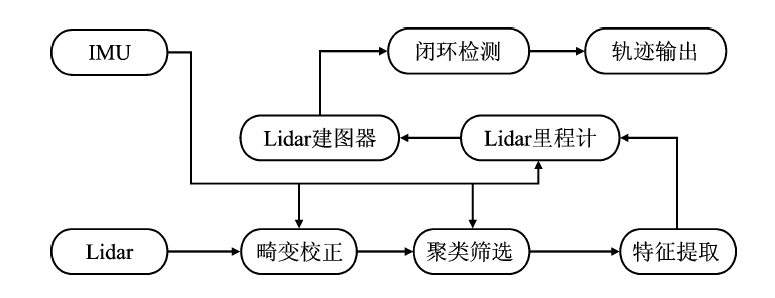
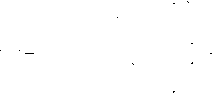
Figure 3.
Radar harness label"
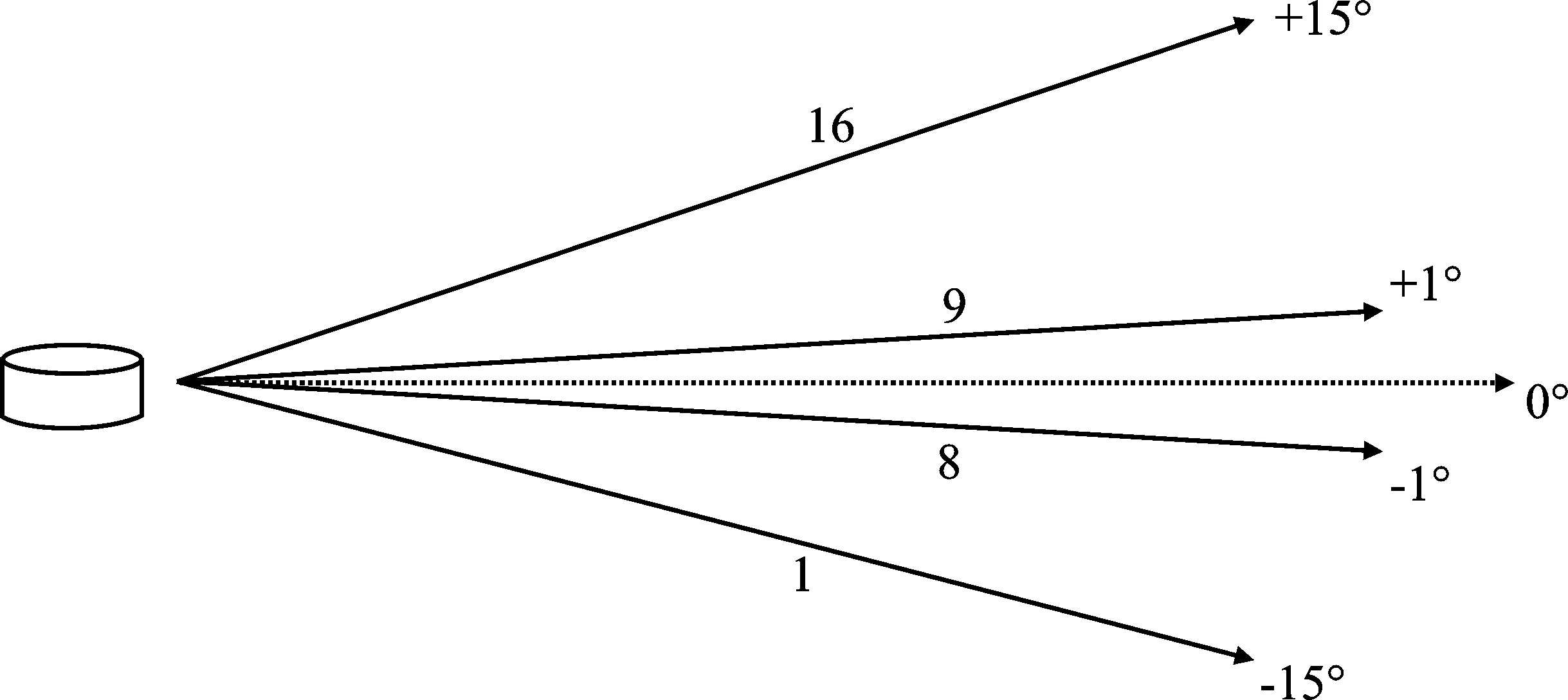

Figure 4.
Closed loop detection (a)Without closed loop detection (b)With closed loop detection"
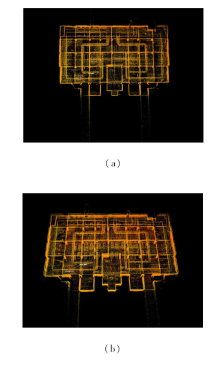
Figure 5.
Parking point cloud (a)Results of LeGO-LOAM (b)Results of the proposed method"
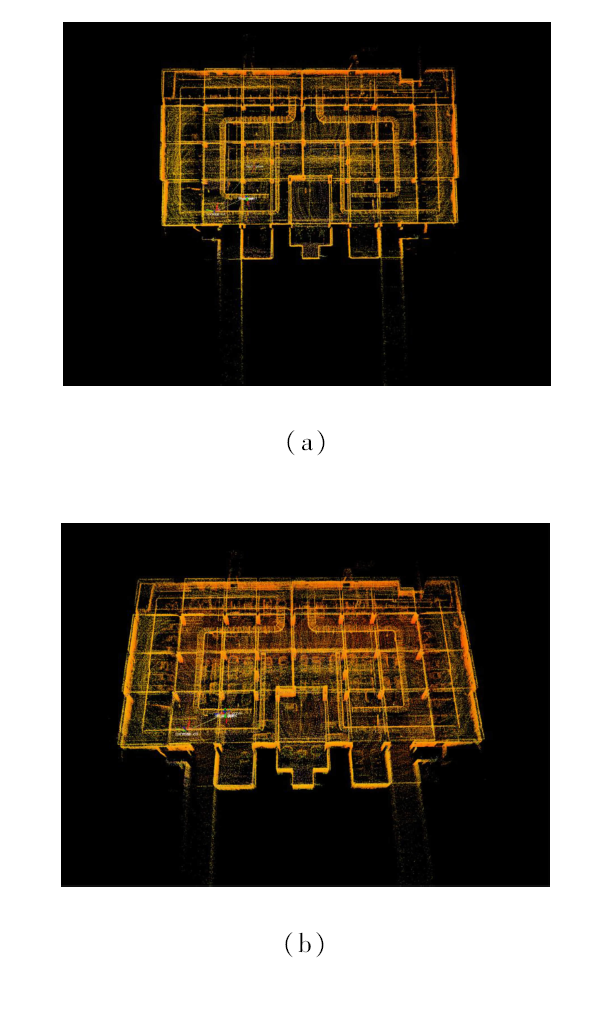

Figure 6.
Parking track (a)Results of LeGO-LOAM (b)Results of the proposed method"
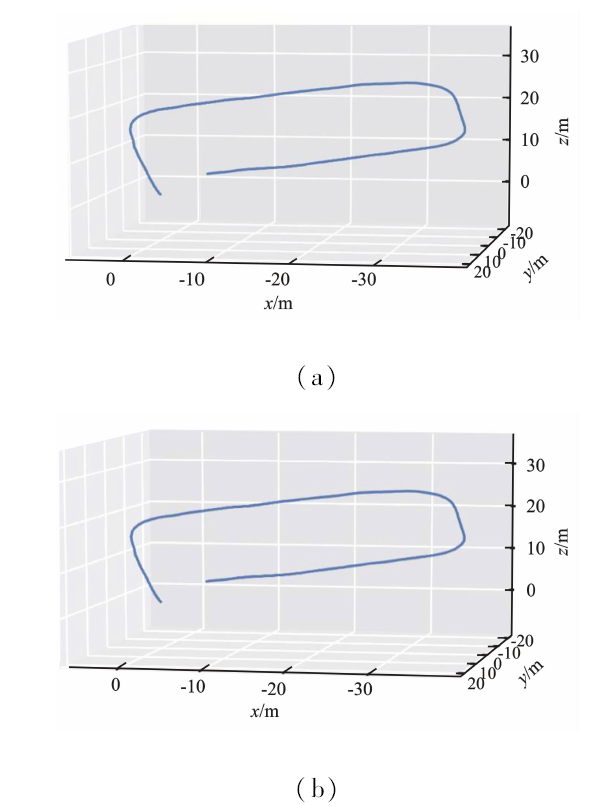
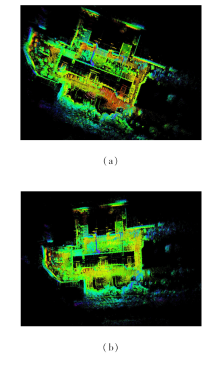
Figure 7.
Liwenzheng building point cloud (a)Results of LeGO-LOAM (b)Results of the proposed method"
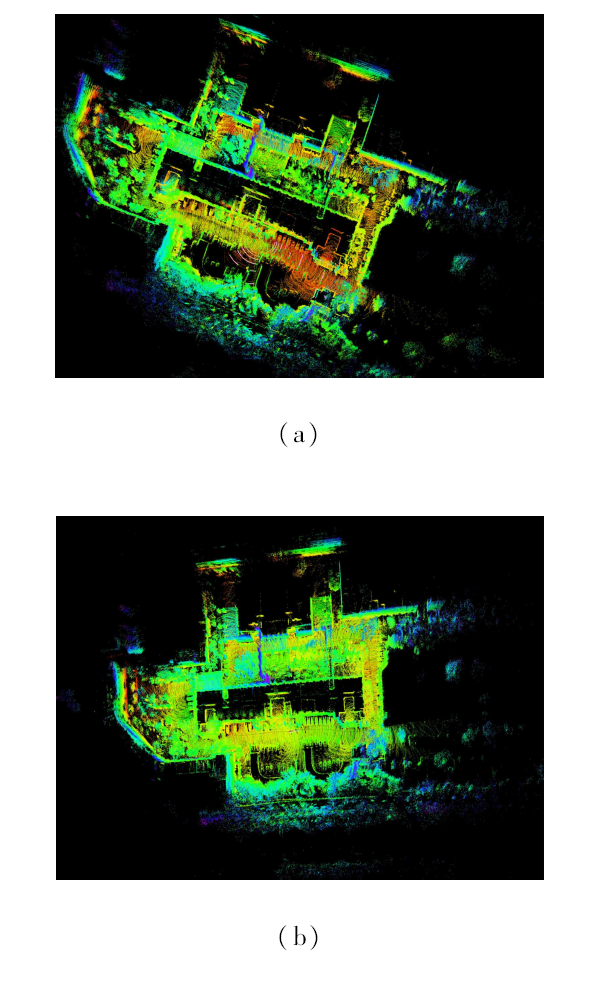

Figure 8.
Liwenzheng building track (a)Results of LeGO-LOAM (b)Results of the proposed method"
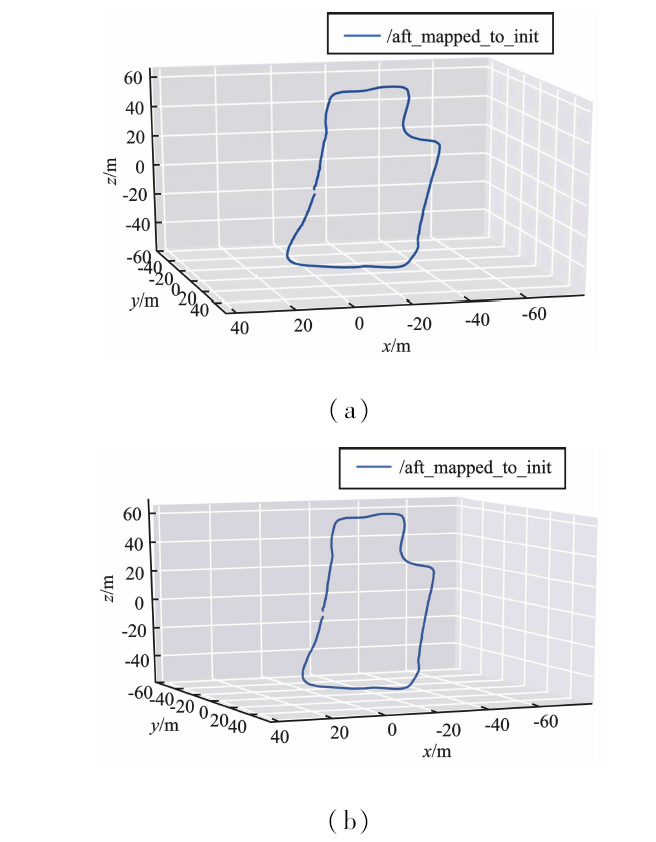

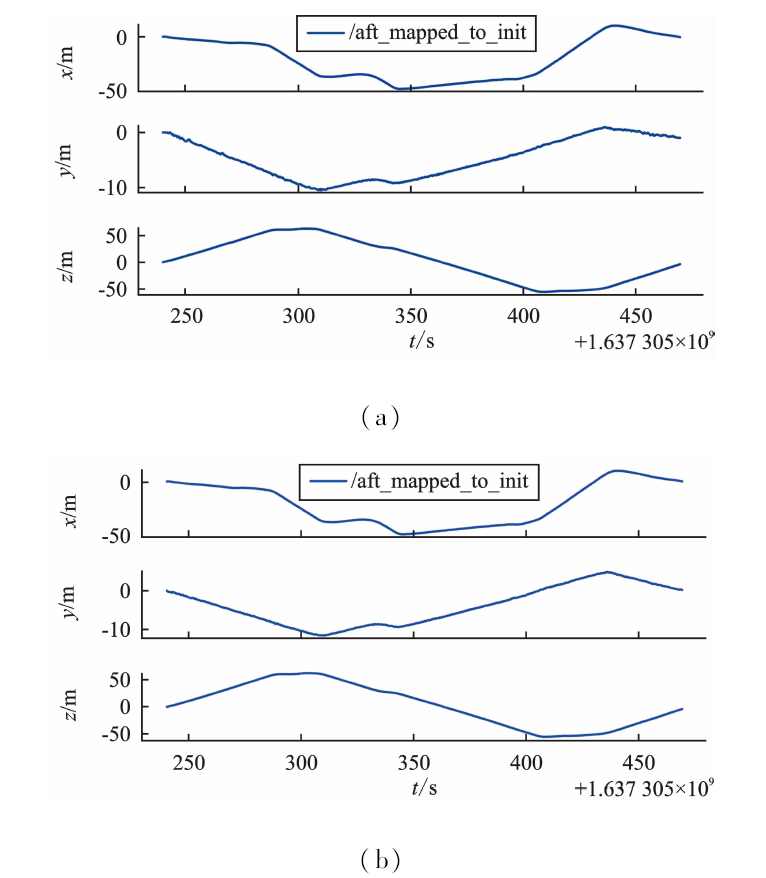
Figure 9.
Liwenzheng building track details (a)Results of LeGO-LOAM (b)Results of the proposed method"
| [1] | Durrant Whyte H, Bailey T. Simultaneous localization and mapping:Part I[J]. IEEE Robotics & Automation Magazine, 2006, 13(2):99-110. |
| [2] | Censi A. An ICP variant using a point-to-line metric[C]. Pasadena: Proceeding of the IEEE International Conference on Robotics and Automation, 2008:19-25. |
| [3] | Kohlbrecher S, Von Stryk O, Meyer J, et al. A flexible and scalable SLAM system with full 3D motion estimation[C]. Kyoto: Proceedings of the IEEE International Symposium on Safety, Security, and Rescue Robotics, 2011:155-160. |
| [4] | 吴勇, 关胜晓. 基于无迹卡尔曼滤波器的改进SLAM问题求解方法[J]. 计算机系统应用, 2017, 26(3):30-36. |
| Wu Yong, Guan Shengxiao. Improved solution based on unscented Kalman filter in the SLAM[J]. Computer Systems & Applications, 2017, 26(3):30-36. | |
| [5] | Zhang J, Singh S. LOAM: Lidar odometry and mapping in real-time[C]. Berkeley: Robotics Science and Systems, 2014:1-9. |
| [6] | Shan T, Englot B. Lego-loam: Lightweight and ground-optimized lidar odometry and mapping on variable terrain[C]. Madrid: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2018:4758-4765. |
| [7] | 宋凯, 钟若飞, 杜黎明. 3D SLAM的室内背包移动测量系统研究[J]. 测绘科学, 2019, 44(5):126-131. |
| Song Kai, Zhong Ruofei, Du Liming. Research of indoor backpacked mobile mapping system based on 3D SLAM[J]. Science of Surveying and Mapping, 2019, 44(5):126-131. | |
| [8] | Ye H, Chen Y, Liu M. Tightly coupled 3d lidar inertial odometry and mapping[C]. Montreal: Proceedings of the International Conference on Robotics and Automation, 2019:3144-3150. |
| [9] |
Zhang J, Singh S. Low-drift and real-time lidar odometry and mapping[J]. Autonomous Robots, 2017, 41(2):401-416.
doi: 10.1007/s10514-016-9548-2 |
| [10] | Shan T, Englot B, Meyers D, et al. Lio-sam: Tightly-coupled lidar inertial odometry via smoothing and mapping[C]. Las Vegas: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2020:401-416. |
| [11] |
Kaess M, Ranganathan A, Dellaert F. iSAM: Incremental smoothing and mapping[J]. IEEE Transactions on Robotics, 2008, 24(6):1365-1378.
doi: 10.1109/TRO.2008.2006706 |
| [12] |
Kaess M, Johannsson H, Roberts R, et al. iSAM2: Incremental smoothing and mapping using the Bayes tree[J]. The International Journal of Robotics Research, 2012, 31(2):216-235.
doi: 10.1177/0278364911430419 |
| [13] | Wang H, Wang C, Xie L. Intensity scan context: Coding intensity and geometry relations for loop closure detection[C]. Paris: Proceedings of the IEEE International Conference on Robotics and Automation, 2020:2095-2101. |
| [14] |
Forster C, Carlone L, Dellaert F, et al. On-manifold preintegration for real-time visual-inertial odometry[J]. IEEE Transactions on Robotics, 2016, 33(1):1-21.
doi: 10.1109/TRO.2016.2597321 |
| [15] |
Kschischang F R, Frey B J, Loeliger H A. Factor graphs and the sum-product algorithm[J]. IEEE Transactions on Information Theory, 2001, 47(2):498-519.
doi: 10.1109/18.910572 |
| [16] | 陈文佑, 章伟, 史晓帆, 等. 一种改进ORB特征匹配的半稠密三维重建ORB-SLAM算法[J]. 电子科技, 2021, 34(12):62-67. |
| Chen Wenyou, Zhang Wei, Shi Xiaofan, et al. A semi-dense 3D reconstruction ORB-SLAM algorithm with improved ORB feature matching[J]. Electronic Science and Technology, 2021, 34(12):62-67. | |
| [17] | 王松波, 李马骁, 李海瑞, 等. 基于三维激光雷达技术的输电线路廊道障碍物检测研究[J]. 电子科技, 2019, 32(4):81-84. |
| Wang Songbo, Li Maxiao, Li Hairui, et al. Research on obstacle detection of transmission line corridor based on 3D laser radar technology[J]. Electronic Science and Technology, 2019, 32(4):81-84. | |
| [18] |
孙喜亮, 关宏灿, 苏艳军, 等. 面向高精度城市测绘的激光紧耦合SLAM方法[J]. 测绘学报, 2021, 50(11):1585-1593.
doi: 10.11947/j.AGCS.2021.20210243 |
|
Sun Xiliang, Guan Hongcan, Sun Yanjun, et al. A tightly coupled SLAM method for precise urban mapping[J]. Acta Geodaetica et Cartographica Sinica, 2021, 50(11):1585-1593.
doi: 10.11947/j.AGCS.2021.20210243 |
| [1] | ZHANG Jinghao,ZHANG Xuanxiong,Christian Wolf,Michael Wick. Study on the Characteristics of Ignition Discharge of A Small Penning Ion Source by Increasing Magnetic Field [J]. Electronic Science and Technology, 2023, 36(5): 71-79. |
| [2] | WU Fuzhuan,XIANG Naihuang,ZHOU Yuanhao,CHEN Mengna. PI Approximate Engineering Design of DC-DC Conversion Compensation Network [J]. Electronic Science and Technology, 2023, 36(5): 16-22. |
| [3] | ZHU Jiawen,CHEN Zhuo,LIU Renzhi,LIU Bolin,CHEN Xiangping. Integrated Control Strategy of Wind Turbine Inertia Support and Primary Frequency Regulation [J]. Electronic Science and Technology, 2023, 36(5): 9-15. |
| [4] | BIAN Dapeng,WANG Yeting,PENG Yaxin,TANG Haoquan. Research on the Index Strategy of Deck Operation Station Selection Based on Simulation Optimization [J]. Electronic Science and Technology, 2023, 36(5): 88-94. |
| [5] | TANG Zenan,MIAO Xiaodan,YANG Jian,YUAN Tianchen. Research on Low Mach Number Transitional Cavity Jet Noise Reduction of High-Speed Train Pantograph [J]. Electronic Science and Technology, 2023, 36(4): 29-35. |
| [6] | XIA Zihao,LI Yudong. Research on Control Strategy of Single-Phase Grid-Connected Inverter Based on dSPACE [J]. Electronic Science and Technology, 2023, 36(3): 62-68. |
| [7] | SUN Sinan,HAO Zhenghang. Research on Battery Grid Connection Based on Voltage and Current Double Loop Control [J]. Electronic Science and Technology, 2023, 36(2): 13-21. |
| [8] | WANG Yumei,WANG Lulu. Distribution Network Dispatching Optimization Strategy Energy Storage Based on Time-of-Use Electricity Price and User-Side [J]. Electronic Science and Technology, 2023, 36(2): 7-12. |
| [9] | LIU Meihong,HONG Enhang,LI Zhenhua,TENG Baoren. Study on Wire Arc Additive Manufacturing Forming Based on Image Processing and Numerical Simulation [J]. Electronic Science and Technology, 2023, 36(1): 7-14. |
| [10] | GE Chuanjiu,WU Peng,JIN Junzhe,DONG Xiangxiang,LOU Qikai. Photovoltaic Maximum Power Point Tracking Based on Improved Differential Evolution Algorithm [J]. Electronic Science and Technology, 2022, 35(9): 15-21. |
| [11] | SUN Sinan,HAO Zhenghang. Photovoltaic Grid-Connected System Based on Adaptive VSG Control [J]. Electronic Science and Technology, 2022, 35(9): 22-29. |
| [12] | MING Can,MA Chunwei. Numerical Simulation and Thermal Cycle Analysis of MAG Welding Temperature Field Based on ABAQUS [J]. Electronic Science and Technology, 2022, 35(9): 74-78. |
| [13] | LIU Yongpan,WANG Ran. Minimum Cost of Heterogeneous Directional Sensor Networks for Target Coverage [J]. Electronic Science and Technology, 2022, 35(7): 14-21. |
| [14] | DING Huihui,SHAO Tingting,QIAO Xi. Research on Azimuth Error Compensation Based on BP Neural Network at Small-Angle Deviation [J]. Electronic Science and Technology, 2022, 35(5): 33-37. |
| [15] | Sunyun YANG,Xiu KAN. Design of Biological Behavior Analysis System Based on Vision and IMU Sensors [J]. Electronic Science and Technology, 2022, 35(4): 28-34. |
|
