Electronic Science and Technology ›› 2023, Vol. 36 ›› Issue (6): 1-7.doi: 10.16180/j.cnki.issn1007-7820.2023.06.001
LIU Wenjing,ZHANG Guobao,LIU Yuheng
Received:2022-01-14
Online:2023-06-15
Published:2023-06-20
Supported by:CLC Number:
LIU Wenjing,ZHANG Guobao,LIU Yuheng. Sliding Mode Control of Pipe Welding Robot Based on Extended State Observer[J].Electronic Science and Technology, 2023, 36(6): 1-7.
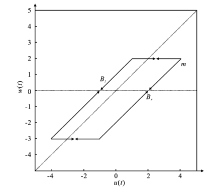
Figure 1.
Backlash nonlinearity"
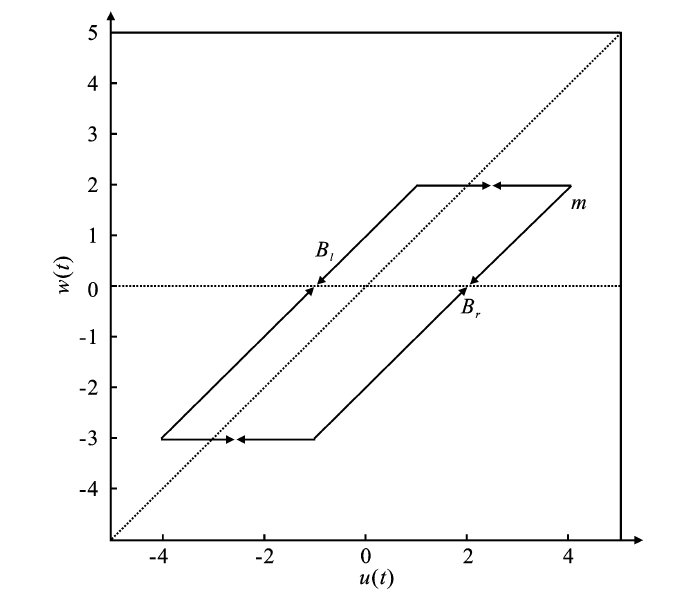
Table 1.
Parameters of controllers"
| SMC | 改进SMC+ESO | ||||
|---|---|---|---|---|---|
| c | k | ε | k | α | β |
| 20 | 50 | 100 | 50 | 3.5 | 0.8 |
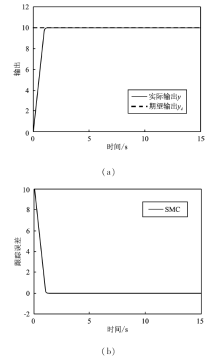
Figure 2.
Tracking outputs and tracking error of SMC (a)Tracking outputs of SMC (b)Tracking error of SMC"
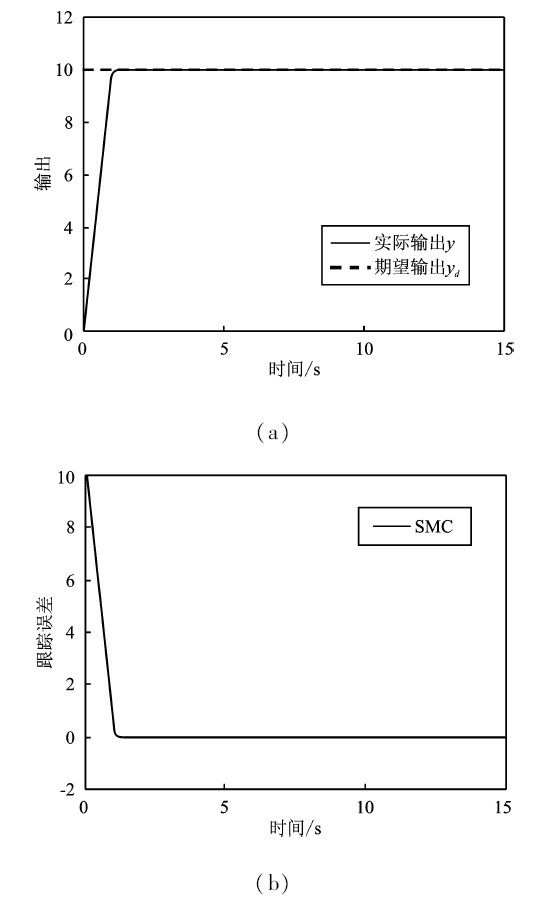

Figure 3.
Tracking outputs and tracking error of improved SMC+ESO (a)Tracking outputs of improved SMC+ESO (b)Tracking error of improved SMC+ESO"

Table 2.
Parameters of controllers (k=200)"
| SMC | 改进SMC+ESO | ||||
|---|---|---|---|---|---|
| c | k | ε | k | α | β |
| 20 | 200 | 100 | 200 | 3.5 | 0.8 |
Table 3.
Parameters of controllers (k=50)"
| SMC | 改进SMC+ESO | ||||
|---|---|---|---|---|---|
| c | k | ε | k | α | β |
| 20 | 50 | 100 | 50 | 3.5 | 0.8 |
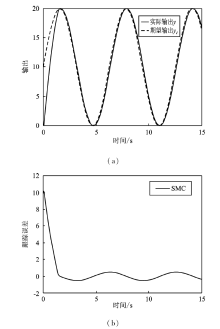
Figure 4.
Tracking outputs and tracking error of SMC (k=200) (a)Tracking outputs of SMC(b)Tracking error of SMC"
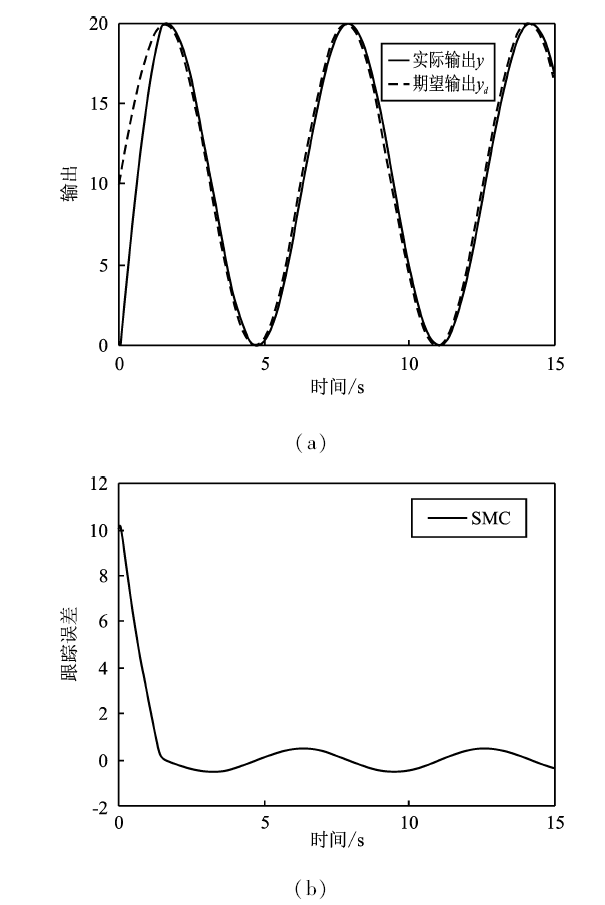

Figure 5.
Tracking outputs and tracking error of improved SMC+ESO (k=200) (a)Tracking outputs of improved SMC+ESO (b)Tracking error of improved SMC+ESO"


Figure 6.
Tracking outputs and tracking error of SMC (k=50) (a)Tracking outputs of SMC (b)Tracking error of SMC"
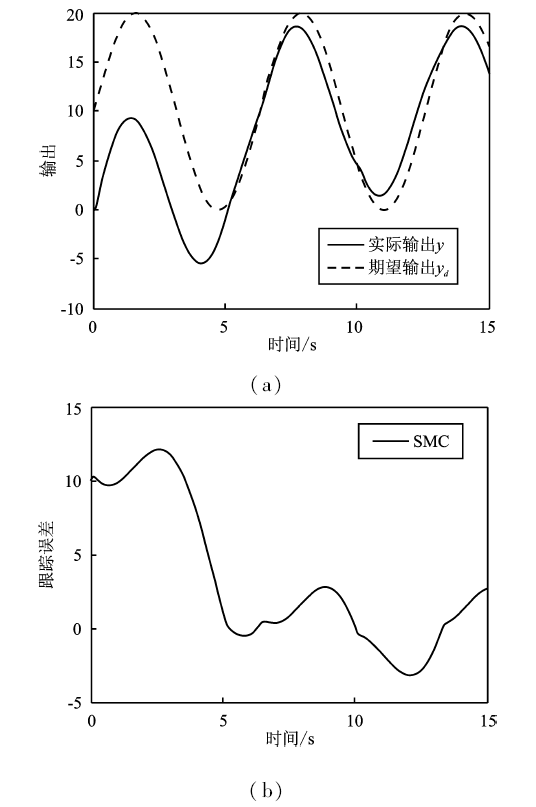

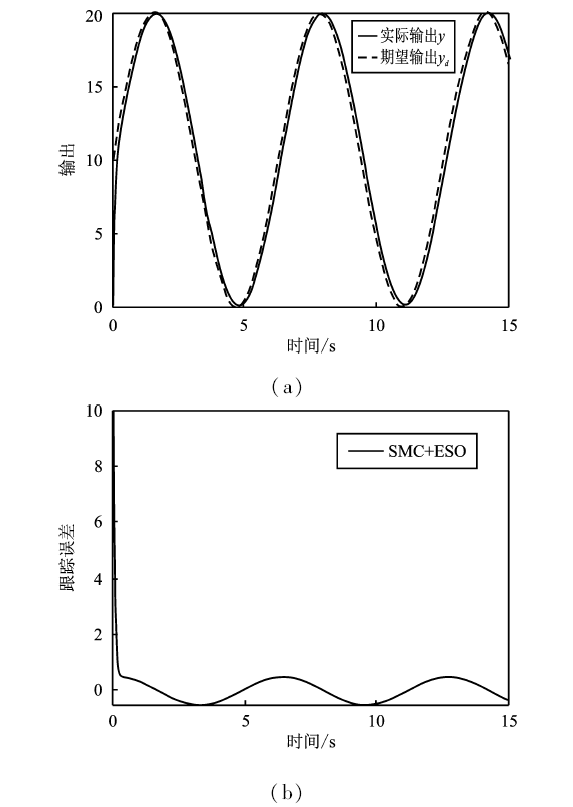
Figure 7.
Tracking outputs and tracking error of improved SMC+ESO (k=50) (a)Tracking outputs of improved SMC+ESO (b)Tracking error of improved SMC+ESO"
| [1] | 王世剑, 孙红江, 王佳伟, 等. 含齿隙转台伺服系统的RBF神经网络反步控制[J]. 现代制造工程, 2021(5):39-46. |
| Wang Shijian, Sun Hongjiang, Wang Jiawei, et al. RBF neural network backstepping control of turntable servo system with backlash[J]. Modern Manufacturing Engineering, 2021(5):39-46. | |
| [2] | 桂建伟. 伺服系统齿隙补偿与谐振抑制方法研究[D]. 南京: 东南大学, 2020:9-65. |
| Gui Jianwei. Research on backlash compensation and resonance suppression of servo system[D]. Nanjing: Southeast University, 2020:9-65. | |
| [3] | 陈庆伟, 郭毓, 杨静忠. 提高齿隙非线性系统精度的应用研究[J]. 南京理工大学学报:自然科学版, 2000, 24(6):486-489. |
| Chen Qingwei, Guo Yu, Yang Jingzhong. A study of application of improving precision of nonlinear system with backlash[J]. Journal of Nanjing University of Science and Technology, 2000, 24(6):486-489. | |
| [4] | 马艳玲, 黄进, 张丹. 伺服系统中齿隙非线性的自适应补偿[J]. 系统仿真学报, 2009, 21(5):1498-1504. |
| Ma Yanling, Huang Jin, Zhang Dan. Adaptive compensation of backlash nonlinearity for servo systems[J]. Journal of System Simulation, 2009, 21(5):1498-1504. | |
| [5] |
Lagerberg A, Egardt B. Backlash estimation with application to automotive powertrains[J]. IEEE Transactions on Control Systems Technology, 2007, 15(3):483-493.
doi: 10.1109/TCST.2007.894643 |
| [6] |
Tao G, Kokotovic P V. Adaptive control of system with backlash[J]. Automatic, 1993, 29(2):323-335.
doi: 10.1016/0005-1098(93)90126-E |
| [7] | Tao G. Adaptive control of systems with non smooth input and output nonlinearities[C]. New Orleans: Proceedings of the Thirty-fourth Conference on Decision and Control, 1995:3429-3434. |
| [8] | Grundelius M, Angeli D. Adaptive control of systems with backlash acting on the input[C]. Kobe: IEEE Conference on Decision and Control, 1996:4689-4694. |
| [9] | 李兵强, 陈晓雷, 林辉, 等. 机电伺服系统齿隙补偿及终端滑模控制[J]. 电工技术学报, 2016, 31(9):162-168. |
| Li Bingqiang, Chen Xiaolei, Lin Hui, et al. Terminal sliding mode control for mechatronic servo systems with backlash nonlinearity compensation[J]. Transactions of China Electrotechnical Society, 2016, 31(9):162-168. | |
| [10] | Jang J O, Son M K, Chung H T. Friction and output backlash compensation of systems using neural network and fuzzy logic[C]. Boston: Proceedings of the American Control Conference, 2004:1758-1763. |
| [11] |
Su C Y, Oya M, Hong H. Stable adaptive fuzzy control of nonlinear systems preceded by unknown backlash-like hysteresis[J]. IEEE Transactions on Fuzzy Systems, 2003, 11(1):1-8.
doi: 10.1109/TFUZZ.2002.806312 |
| [12] | 郭健, 吴益飞, 陈庆伟. 具有输入齿隙的一类非线性系统自适应控制[J]. 兵工学报, 2011, 32(10):1298-1304. |
| Guo Jian, Wu Yifei, Chen Qingwei. Adaptive control of a nonlinear system with input backlash[J]. Acta Armamentarii, 2011, 32(10):1298-1304. | |
| [13] | 朱胜, 孙明轩, 何熊熊. 输入具有齿隙非线性特性的周期系统的自适应控制[J]. 控制理论与应用, 2012, 29(4):535-538. |
| Zhu Sheng, Sun Mingxuan, He Xiongxiong. Adaptive control of a class of periodically time-varying nonlinear systems with input backlash[J]. Control Theory and Application, 2012, 29(4):535-538. | |
| [14] | 吉升阳, 汪旭东, 许孝卓, 等. 基于滑模控制的永磁同步电机直接转矩控制研究[J]. 电子科技, 2019, 32(7):1-5. |
| Ji Shengyang, Wang Xudong, Xu Xiaozhuo, et al. Research on direct torque of permanent magnet synchronous motor based on sliding mode control[J]. Electronic Science and Technology, 2019, 32(7):1-5. | |
| [15] | 仝兆景, 郑权, 韩耀飞, 等. 基于新滑模观测器的永磁同步电机无传感器控制[J]. 电子科技, 2021, 34(12):1-6. |
| Tong Zhaojing, Zheng Quan, Han Yaofei, et al. A novel sliding mode observer for position sensorless control of permanent magnet synchronous motor[J]. Electronic Science and Technology, 2021, 34(12):1-6. | |
| [16] | 张世华, 齐晓慧, 万慧. 广义非线性扩张状态观测器设计及性能分析[J]. 控制理论与应用, 2021, 38(12):2059-2068. |
| Zhang Shihua, Qi Xiaohui, Wan Hui. Design and performance analysis of generalized nonlinear extended state observer[J]. Control Theory & Applications, 2021, 38(12):2059-2068. | |
| [17] | 刘京, 李洪文, 邓永停. 基于新型趋近律和扰动观测器的永磁同步电机滑模控制[J]. 工程科学学报, 2017, 39(6):933-944. |
| Liu Jing, Li Hongwen, Deng Yongting. PMSM sliding-mode control based on novel reaching law and disturbance observer[J]. Chinese Journal of Engineering, 2017, 39(6):933-944. | |
| [18] | 李承霖, 孙洪飞. 二阶系统自抗扰控制的扩张状态观测器的改进[J]. 厦门大学学报(自然科学版), 2021, 60(4):746-754. |
| Li Chenglin, Sun Hongfei. Improvement of extended state observer for active disturbance rejection control of second-order systems[J]. Journal of Xiamen University(Natural Science), 2021, 60(4):746-754. | |
| [19] |
夏先齐, 张葆, 李贤涛, 等. 基于扩张状态观测器的永磁同步电机低速滑模控制[J]. 光学精密工程, 2019, 27(12):2628-2638.
doi: 10.3788/OPE. |
|
Xia Xianqi, Zhang Bao, Li Xiantao, et al. Low speed sliding mode control of permanent magnet synchronous motor based on extended state observer[J]. Optics and Precision Engineering, 2019, 27(12):2628-2638.
doi: 10.3788/OPE. |
| [1] | ZHANG Yuwen,WANG Yagang,DING Damin,LIN Yanzhao. Study on Compliance Control for Falling Prevention of Smart Walking-Aids [J]. Electronic Science and Technology, 2023, 36(2): 46-52. |
| [2] | WANG Xin,XU Xiang,WU Boning,HUANG Chong. Research on Robust Feedforward Control Strategy of Bidirectional AC/DC Converter for DC Microgrid [J]. Electronic Science and Technology, 2022, 35(6): 64-69. |
| [3] | YAN Zhenbin,ZHENG Bochao,ZHOU Zhiyong. Research on Grid Connection of Photovoltaic Power Generation Systems Based on a New Robust Droop Control Method [J]. Electronic Science and Technology, 2021, 34(8): 79-86. |
| [4] | GUO Xin,GAO Yan,JIANG Lin,ZHANG Zhishu. Research on Stability of Nonlinear Systems Based on Event Triggering and Quantization [J]. Electronic Science and Technology, 2020, 33(3): 56-61. |
| [5] | ZHANG Lele,SU Qianmin. Adaptive Sliding Mode Control for Nonlinear Systems with Mismatched Quantization [J]. Electronic Science and Technology, 2020, 33(12): 38-43. |
| [6] | LIU Lulu,LIU Ye. Tracking Control Algorithm Based on Dynamic Surface for Nonlinear Systems with Dead-zone Input [J]. Electronic Science and Technology, 2020, 33(11): 49-54. |
| [7] | JI Shengyang,WANG Xudong,XU Xiaozhuo,SUN Weixiang,SHI Kaining. Research on Direct Torque Control of Permanent Magnet Synchronous Motor Based on Sliding Mode Control [J]. Electronic Science and Technology, 2019, 32(7): 1-5. |
| [8] | LI Shaolong,ZHAO Qin,LI Wenlong,CUI Yue,WANG Fan,MEI Yan. Study on Sliding Mode Control in Threephase SVPWM Inverter [J]. , 2016, 29(6): 124-. |
| [9] | GAO Qiuhua,ZENG Zhezhao. Design of NLPID PID Neural Network Controller Based on ESO [J]. , 2016, 29(1): 78-. |
| [10] | WANG Xueyan. Inverted Pendulum System Based on T-S Fuzy Model [J]. , 2015, 28(3): 58-. |
| [11] | ZHANG Siqian,QIU Xiaohua,PENG Yueping. Research on Stochastic Resonance and its Development [J]. , 2014, 27(7): 179-. |
| [12] | ZHAO Hui-Hong. Analysis of Key Technologies in BIPV Micro-grid System [J]. , 2014, 27(1): 113-. |
| [13] | WANG Jingwei,DONG Dawei,HUA Chunrong,YAN Bing. Analysis of the Influencing Factors of EKF [J]. , 2013, 26(8): 10-. |
| [14] | GUO Chen. PID-Type Sliding-Mode Controller for Boost Converter [J]. , 2013, 26(7): 51-. |
| [15] | HU Hai-Xu, LUO Wen-Guang. Adaptive Sliding Mode Control for a Class of Affine Nonlinear System Based on Neural Networks [J]. , 2011, 24(4): 12-. |
|
