Electronic Science and Technology ›› 2023, Vol. 36 ›› Issue (2): 46-52.doi: 10.16180/j.cnki.issn1007-7820.2023.02.007
Previous Articles Next Articles
ZHANG Yuwen1,2,WANG Yagang1,2,DING Damin1,2,LIN Yanzhao1,2
Received:2021-08-16
Online:2023-02-15
Published:2023-01-17
Supported by:CLC Number:
ZHANG Yuwen,WANG Yagang,DING Damin,LIN Yanzhao. Study on Compliance Control for Falling Prevention of Smart Walking-Aids[J].Electronic Science and Technology, 2023, 36(2): 46-52.

Figure 1.
Model machine diagram of the walking-aid"

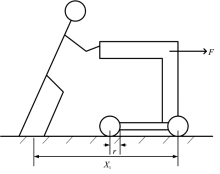
Figure 2.
Human-machine state diagram of a user falling forward"
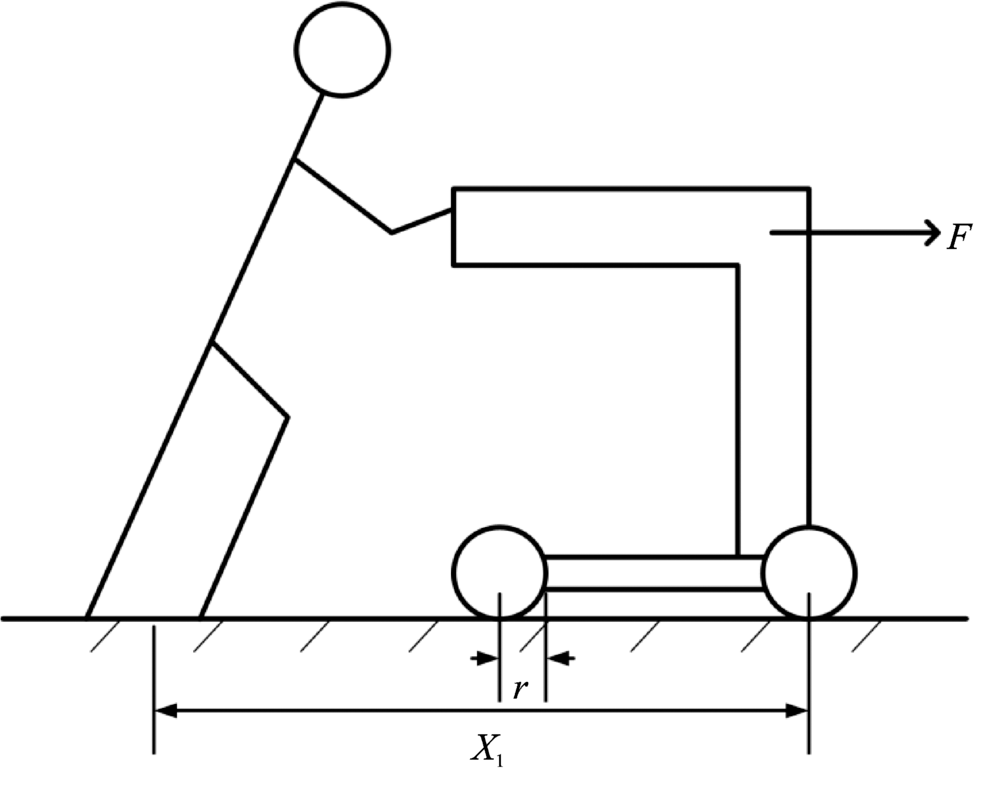
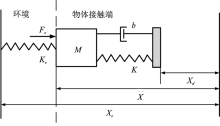
Figure 3.
Human-machine simulation impedance model diagram"
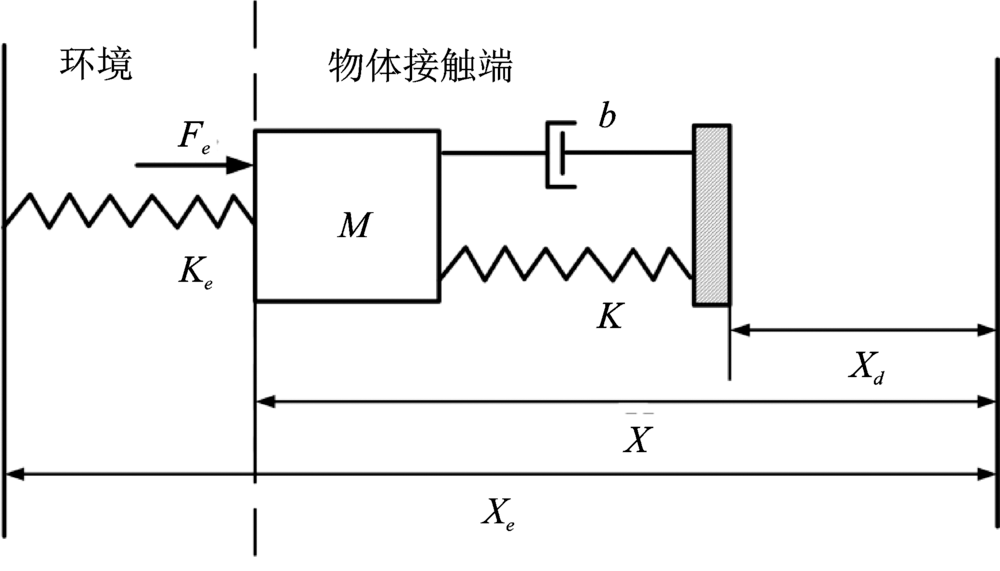
Figure 4.
Compliant control block diagram of the walking-aid against falling"
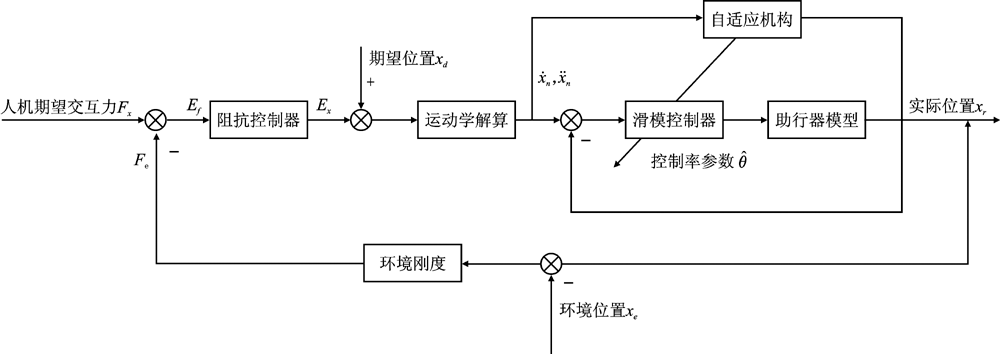
Figure 5.
Diagram of actual human-machine force in simulation experiment 1"
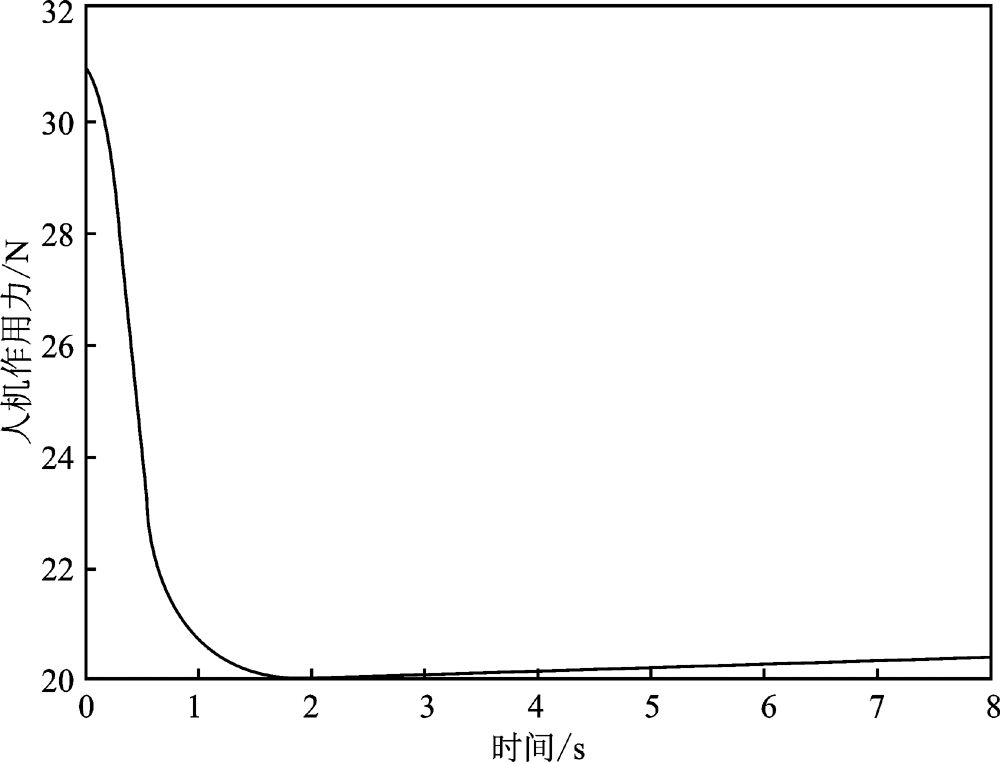
Figure 6.
Diagram of human-machine position error in simulation experiment 1"
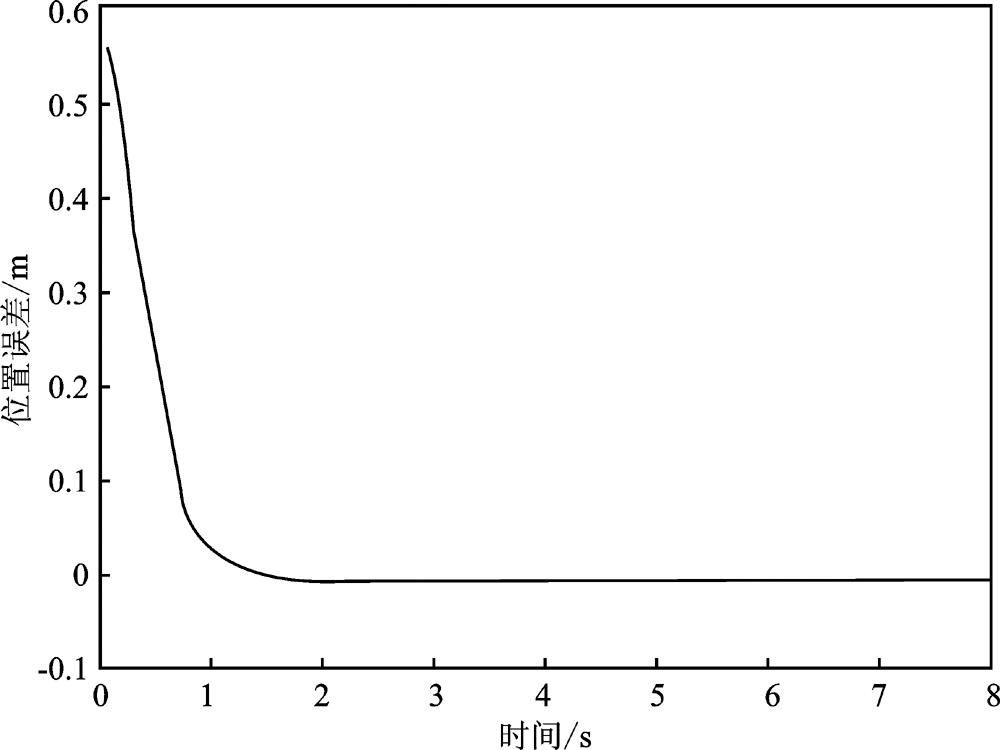
Figure 7.
The position and trajectory of the walking-aid in simulation experiment 1"
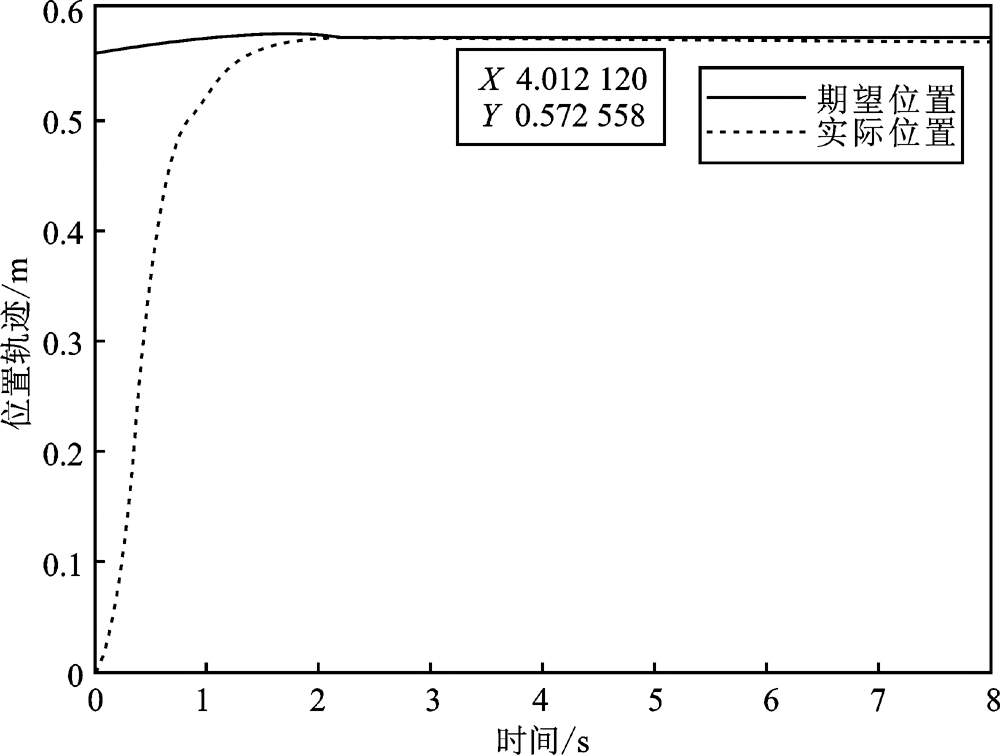
Figure 8.
Diagram of actual human-machine force in simulation experiment 2"
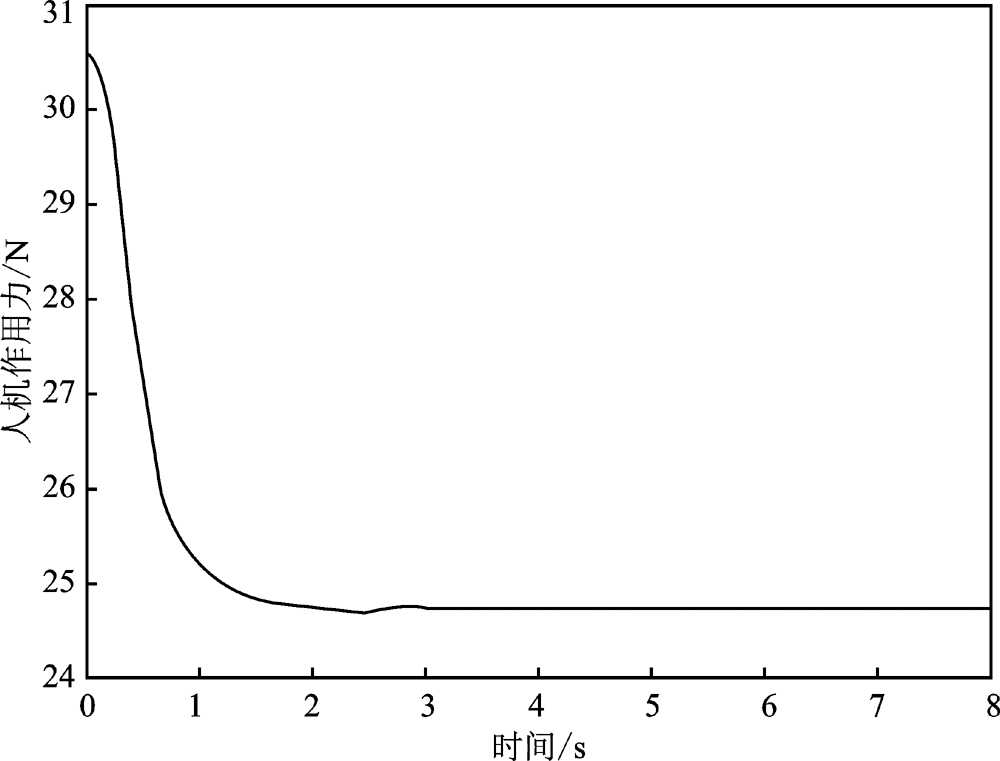
Figure 9.
Man-machine position error diagram in simulation experiment 2"
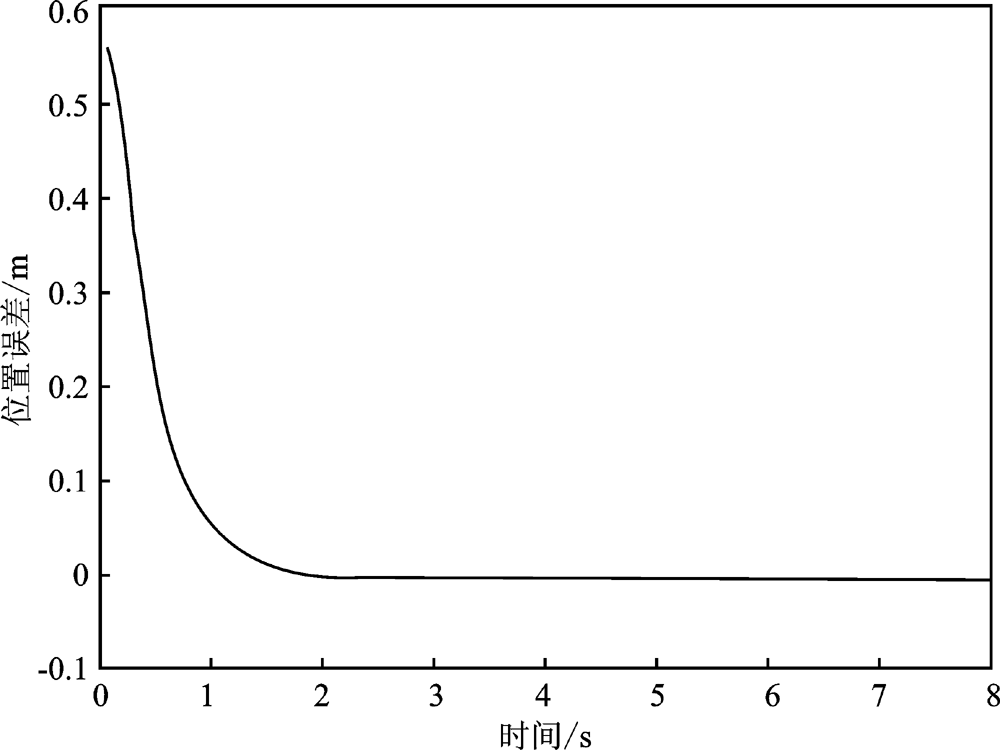
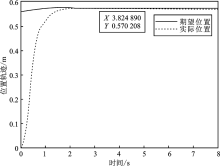
Figure 10.
The position and trajectory of the walking-aid in simulation experiment 2"


Figure 11.
Compliant control experiment of the walking-aid against falling on flat groud"


Figure 12.
Compliant control experiment of the walking-aid against falling on slope"

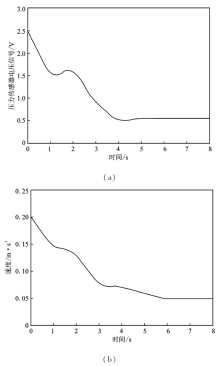
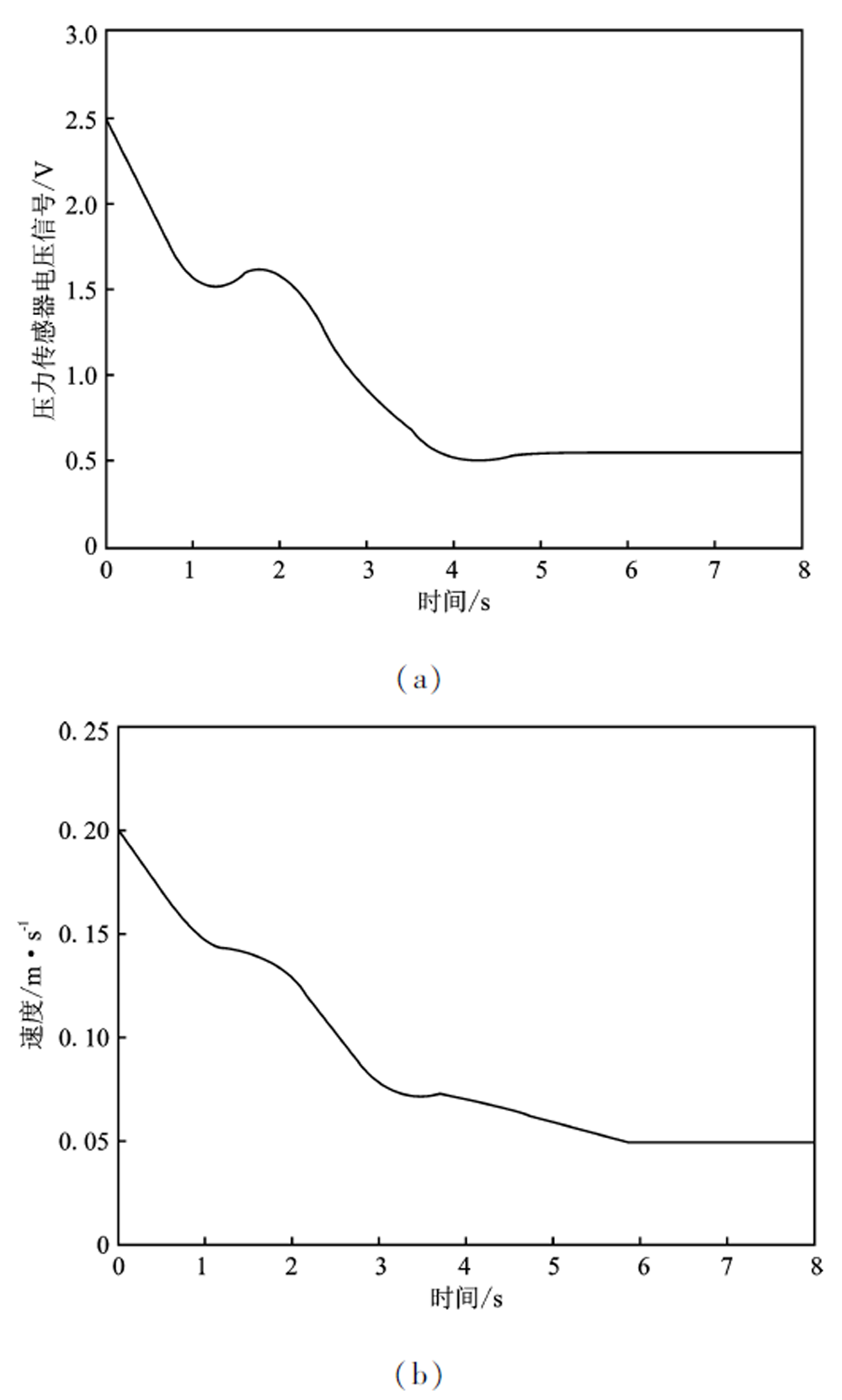
Figure 13.
Compliant control experiment data diagram of the walking-aid against falling (a)Pressure sensor voltage signal and time diagram (b)Speed and time diagram"
| [1] | Zhao X Y, Zhu Z, Liu M, et al. A Smart robotic walker with intelligent close-proximity interaction capabilities for elderly mobility safety[J]. Frontiers in Neurorbotics, 2021, 14(1):93-104. |
| [2] | Kumar V C V, Ha S, Sawicki G, et al. Learning a control policy for fall prevention on an assistive walking device[C]. Paris: Proceedings of the International Conference on Robotics and Automation, 2020. |
| [3] |
Wang T, Merlet J P, Sacco G, et al. Walking analysis of young and elderly people by using an intelligent walker ANG[J]. Robotics and Autonomous Systems, 2016, 75(1):96-106.
doi: 10.1016/j.robot.2014.09.019 |
| [4] |
Yan Q Y, Huang J, Tao C J, et al. Intelligent mobile walking-aids: Perception, control and safety[J]. Advanced Robotics, 2020, 34(1):2-18.
doi: 10.1080/01691864.2019.1653225 |
| [5] | Cao B. Deep learning using for fall detection on the rehabilitation walking-aid robot[C]. Piscataway: International Conference on Intelligent Human-Machine Systems and Cybernetics, 2019. |
| [6] | 陶春静, 晏箐阳, 马俪, 等. 残疾人智能移动助行器的发展现状及趋势[J]. 科技导报, 2019, 37(22):37-50. |
| Tao Chunjing, Yan Qinyang, Ma Li, et al. Intelligent walkers for disabled: Current state and future perspective[J]. Science & Technology Review, 2019, 37(22):37-50. | |
| [7] |
Khanuja K, Joki J, Bachmann G, et al. Gait and balance in the aging population: Fall prevention using innovation and technology[J]. Maturitas, 2018, 110(1):51-56.
doi: 10.1016/j.maturitas.2018.01.021 |
| [8] | Di P, Hasegawa Y, Nakagawa S, et al. Fall detection and prevention control using walking-aid cane robot[J]. Transactions on Mechatronics, 2015, 21(2):625-637. |
| [9] | Xu W X, Huang J. Impedance-sliding mode control based fall prevention motion control algorithm for walking-aid robot[C]. Piscataway: Proceedings of the International Conference on Advanced Robotics and Mechatronics, 2018. |
| [10] | 于振中, 谷华航. 下肢康复机器人模糊增益自适应调整的滑模阻抗控制[J]. 制造业自动化, 2020, 42(7):46-50. |
| Yu Zhenzhong, Gu Huahang. Trajectory tracking control of lower limb rehabilitation robot based on iterative learning with advanced sampling time[J]. Manufacturing Automation, 2020, 42(7):46-50. | |
| [11] | 李沈炎, 韩亚丽, 陈茹雯, 等. 基于滑模PID控制的下肢康复外骨骼控制研究[J]. 组合机床与自动化加工技术, 2021(3):99-101. |
| Li Shenyan, Han Yali, Chen Ruwen, et al. Research on SMC PID control of exoskeleton in lower limb rehabilitation[J]. Modular Machine Tool & Automatic Manufacturing Technique, 2021(3):99-101. | |
| [12] |
Nakagawa S, Hasegawa Y, Fukuda T, et al. Tandem stance avoidance using adaptive and asymmetric admittance control for fall prevention[J]. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2016, 24(5):542-550.
doi: 10.1109/TNSRE.2015.2429315 pmid: 25955991 |
| [13] | Jiang S Y, Lin C Y, Huang K T, et al. Shared control design of a walking-assistant robot[J]. IEEE Transactions on Control Systems Technology, 2017, 25(6):2144-2150. |
| [14] | Zhao D H, Yang J Y, Sun Y Z, et al. A novel auxiliary strategy with compliance and safety for walking rehabilitation training robot[C]. Fushun: Proceedings of the International Conference on Robotics and Rehabilitation Intelligence, 2020. |
| [15] | 周秦源, 邵晨阳, 邵念锋, 等. 基于滑模阻抗的双足机器人单腿柔顺性控制研究[J]. 传感器与微系统, 2021, 40(4):26-32. |
| Zhou Qinyuan, Shao Chenyang, Shao Nianfeng, et al. Research on one-leg flexibility control of biped robot based on sliding mode impedance[J]. Transducer and Microsystem Technologies, 2021, 40(4):26-32. | |
| [16] | 徐文霞. 助行机器人运动控制和安全监护策略研究[D]. 武汉: 华中科技大学, 2016. |
| Xu Wenxia. The research of motion control and safety custody strategy for walking-aid robot[D]. Wuhan: Huazhong University of Science and Technology, 2016. | |
| [17] | 张乐乐, 苏前敏. 具有不匹配量化的非线性系统自适应滑模控制[J]. 电子科技, 2020, 33(12):38-43. |
| Zhang Lele, Shu Qianmin. Adaptive sliding mode control for nonlinear systems with mismatched quantization[J]. Electronic Science and Technology, 2020, 33(12):38-43. | |
| [18] | Azar A T, Serrano F E, Koubäa A, et al. Adaptive terminal-integral sliding mode force control of elastic joint robot manipulators in the presence of hysteresis[C]. Cairo: Proceedings of the International Conference on Advanced Intelligent Systems and Informatics, 2020. |
| [19] | 刘金锟. 滑模变结构控制MATLAB仿真:基本理论与设计方法[M]. 北京: 清华大学出版社, 2019. |
| Liu Jinkun. MATLAB simulation for sliding mode control: The basic theory and design method[M]. Beijing: Tsinghua University Press, 2019. | |
| [20] | 季传坤, 钱俊兵. 基于重复滑膜控制的PMSM的矢量控制系统[J]. 电子科技, 2019, 32(1):52-57. |
| Ji Chuankun, Qian Junbing. Vector control system of PMSM based on repetitive synovial control[J]. Electronic Science and Technology, 2019, 32(1):52-57. |
| [1] | XU Lili,YANG Chao,ZENG Haoran. Fault Section Location of Distribution Network with DG Based on Improved Whale Algorithm [J]. Electronic Science and Technology, 2023, 36(1): 15-20. |
| [2] | JIN Aijuan,SHAO Feixuan,YAN Ziguang. Vector Control of Induction Motor Based on Adaptive Fuzzy Neural Network [J]. Electronic Science and Technology, 2022, 35(9): 65-73. |
| [3] | YANG Yingying,LIU Xiang,SHI Yunyu. An Improved Obstacle Detection Method for AGV [J]. Electronic Science and Technology, 2022, 35(9): 1-6. |
| [4] | SUN Sinan,HAO Zhenghang. Photovoltaic Grid-Connected System Based on Adaptive VSG Control [J]. Electronic Science and Technology, 2022, 35(9): 22-29. |
| [5] | FANG Yueming,WANG Xian. Adaptive Finite-Time Estimation and Simulation of Friction Torque and Friction Model Parameters of Robot Systems [J]. Electronic Science and Technology, 2022, 35(7): 71-78. |
| [6] | TONG Xiaosen,YANG Jinxian. Drilling Tool Acceleration Denoising Based on GRNN Network Adaptive Filtering [J]. Electronic Science and Technology, 2022, 35(7): 46-51. |
| [7] | DU Peng,BAO Xiaoan,HU Yifei,CHEN Dirong. Research on Spatio-Temporal Data Fusion Algorithm of Wireless Sensor Network Based on Kalman Filter [J]. Electronic Science and Technology, 2022, 35(6): 21-27. |
| [8] | WANG Xin,XU Xiang,WU Boning,HUANG Chong. Research on Robust Feedforward Control Strategy of Bidirectional AC/DC Converter for DC Microgrid [J]. Electronic Science and Technology, 2022, 35(6): 64-69. |
| [9] | SHI Zhenhua,ZHANG Na,BAO Xiaoan,SONG Jie. Adaptive Weighted Data Fusion Algorithm Based on Batch Estimation [J]. Electronic Science and Technology, 2022, 35(5): 19-25. |
| [10] | Cunsheng YU,Hongbing YAO,Limin HUANG,Xiajun YANG,Wanyu LÜ. Optical Design of Reflective ADB Module [J]. Electronic Science and Technology, 2022, 35(4): 47-52. |
| [11] | ZHANG Zhihao,FU Dongxiang,YAN Rui. A Measuring System for Frame Size Based on Image Processing Technology [J]. Electronic Science and Technology, 2022, 35(11): 42-47. |
| [12] | YANG Jinxian,LIU Pengwei. Calculation Method of Segmented Borehole Trajectory Based on Magnetic Inertia Measurement [J]. Electronic Science and Technology, 2022, 35(11): 72-79. |
| [13] | SHI Hui,TONG Dongbing. The Asymptotic Synchronization of Neutral Complex Networks with Adaptive Pinning Control [J]. Electronic Science and Technology, 2021, 34(9): 12-16. |
| [14] | WANG Weike,ZHANG Wei,SONG Fang,LONG Lin. Time-Varying Formation Control for Heterogeneous Nonlinear Multi-Agents System [J]. Electronic Science and Technology, 2021, 34(8): 50-57. |
| [15] | WANG Fuzhong,LI Runyu,ZHANG Hongwei,GUO Jiangzhen,ZHANG Li. Research on Flexible Load Control Strategy of Air Conditioning in Power Demand Side [J]. Electronic Science and Technology, 2021, 34(8): 58-63. |
|
