Electronic Science and Technology ›› 2024, Vol. 37 ›› Issue (8): 17-25.doi: 10.16180/j.cnki.issn1007-7820.2024.08.003
Previous Articles Next Articles
CHEN Zhipeng, ZHANG Huilin, CHENG Wenbin, WANG Zhongyang
Received:2023-02-26
Online:2024-08-15
Published:2024-08-21
Supported by:CLC Number:
CHEN Zhipeng, ZHANG Huilin, CHENG Wenbin, WANG Zhongyang. HOT-FSMO Sensorless Control Based on Improved Tracking Differentiator[J].Electronic Science and Technology, 2024, 37(8): 17-25.

Figure 1.
Structure of HOT-FSMO based on improved tracking differentiator"
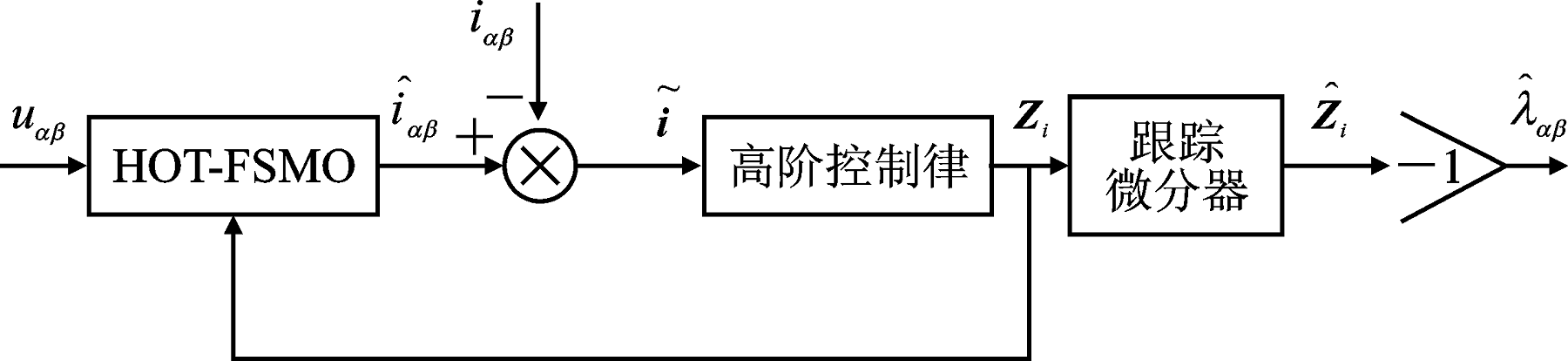
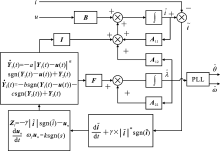
Figure 2.
HOT-FSMO algorithm based on a new tracking differentiator"
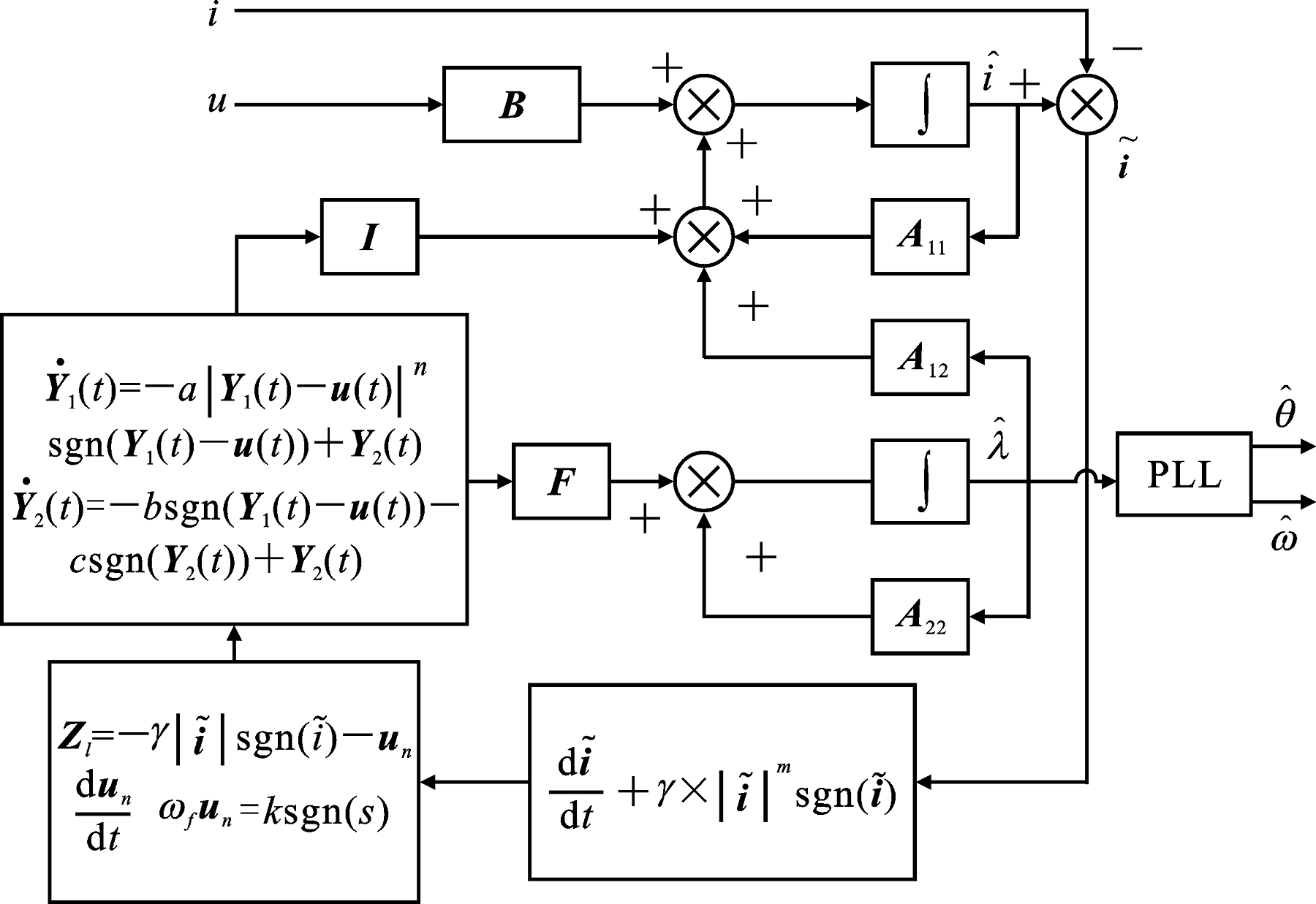
Figure 3.
Experimental platform"
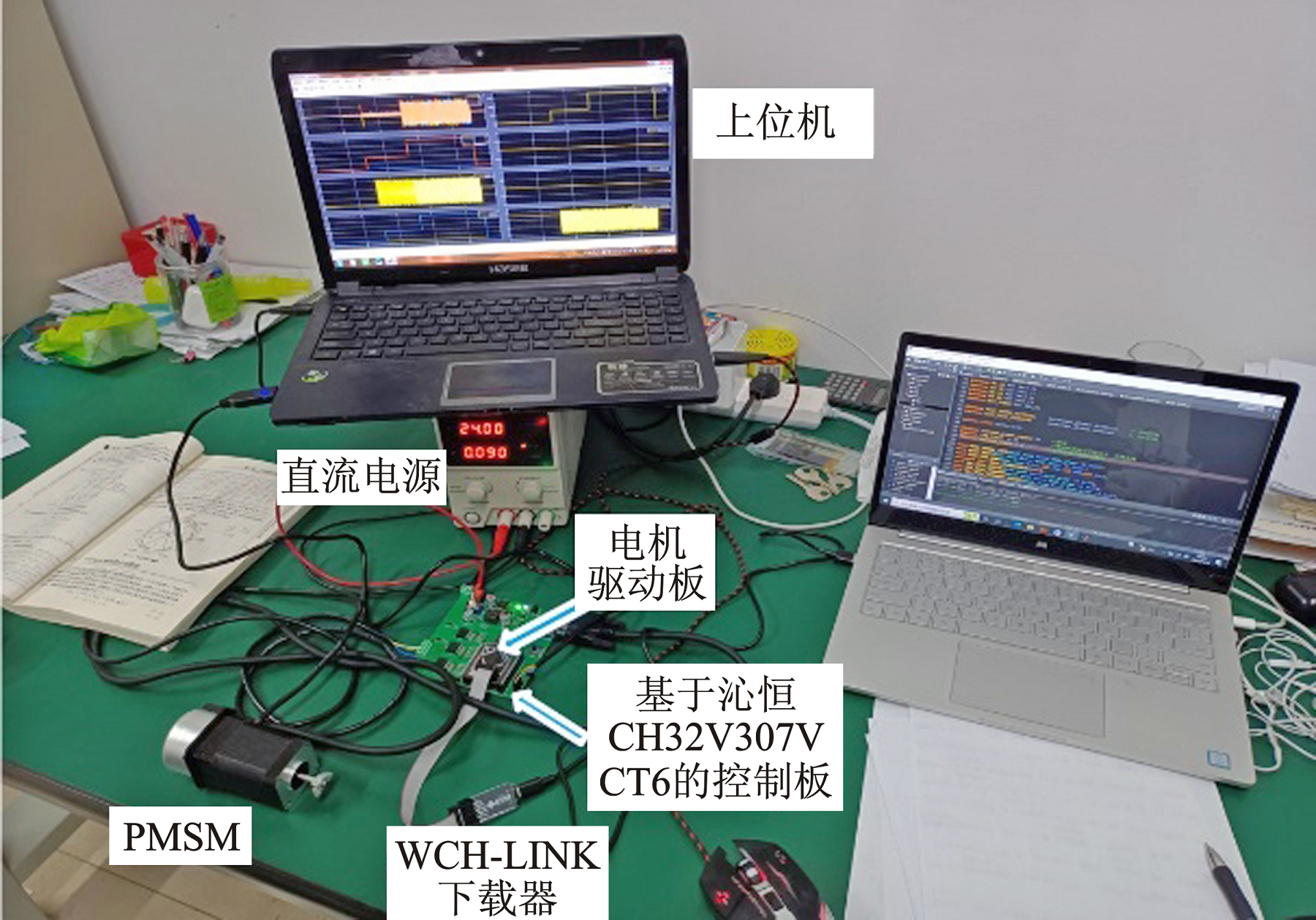
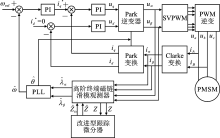
Figure 4.
PMSM sensorless control system"
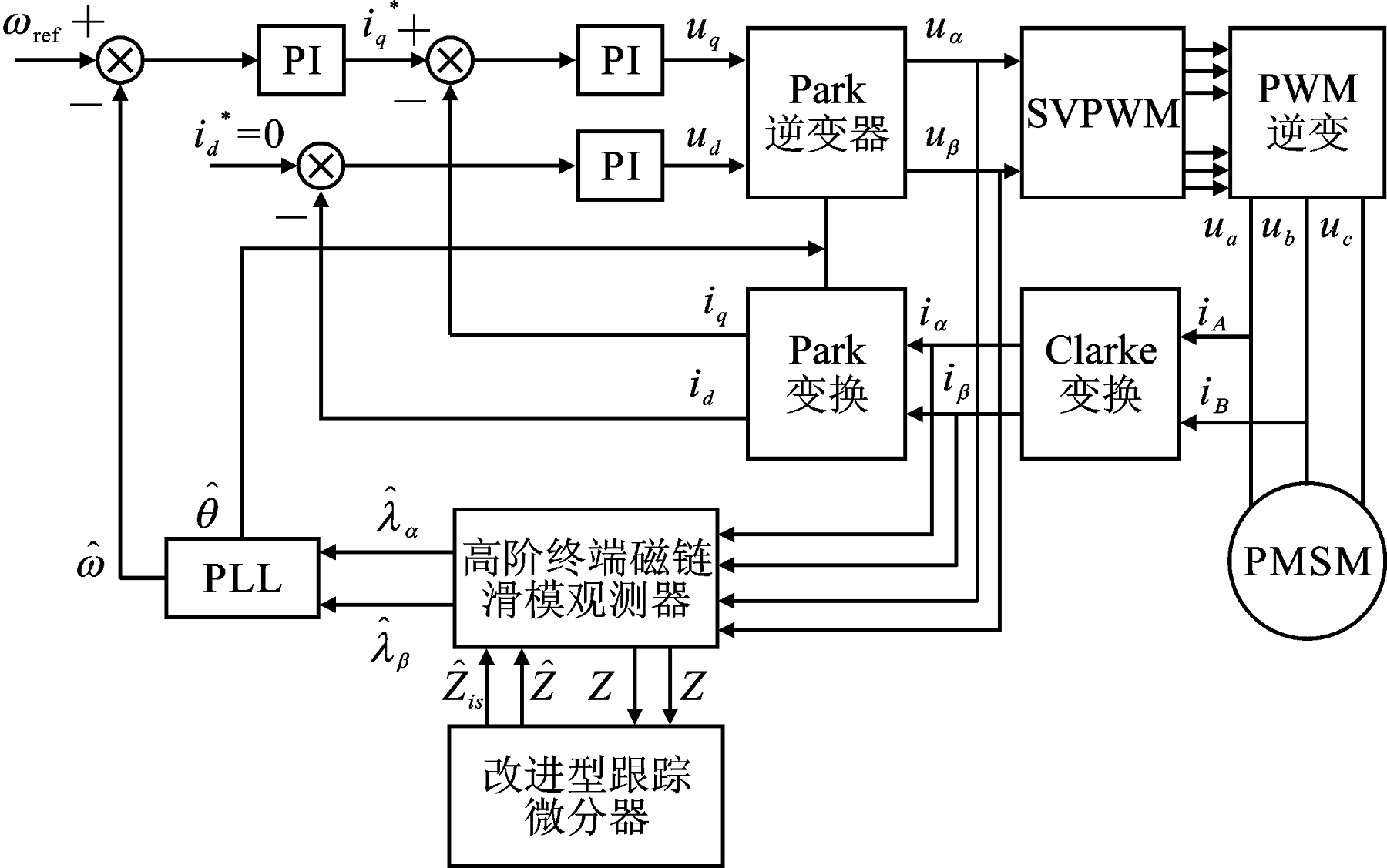
Table 1.
PMSM parameters"
| PMSM参数 | 数值 |
|---|---|
| 定子电阻Rs/Ω | 2.875 0 |
| 定子电感Ls/H | 0.008 5 |
| 永磁体磁通ψf/Wb | 0.175 0 |
| 转动惯量J/kg·m2 | 0.003 0 |
| 阻尼系数B/N·m·s | 0 |
| 极对数Pn | 4 |
Table 2.
Control algorithm parameters"
| 控制算法参数 | 数值 |
|---|---|
| 转速环比例增益kp | 0.016 5 |
| 转速环积分增益ki | 0.010 0 |
| 电流环比例增益kp | 17.850 0 |
| 电流环积分增益ki | 6 037.500 0 |
| 死区时间/μs | 2 |
| 采样周期/kHz | 20 |
| 滑模增益k | 1 600 |

Figure 5.
Estimated waveforms of rotor flux linkage (a)First-order FSMO based on traditional low-pass filter (b)HOT-FSMO based on a new tracking differentiator"

Figure 6.
Speed curves (a)Traditional first-order FSMO (b)HOT-FSMO based on a new tracking differentiator"
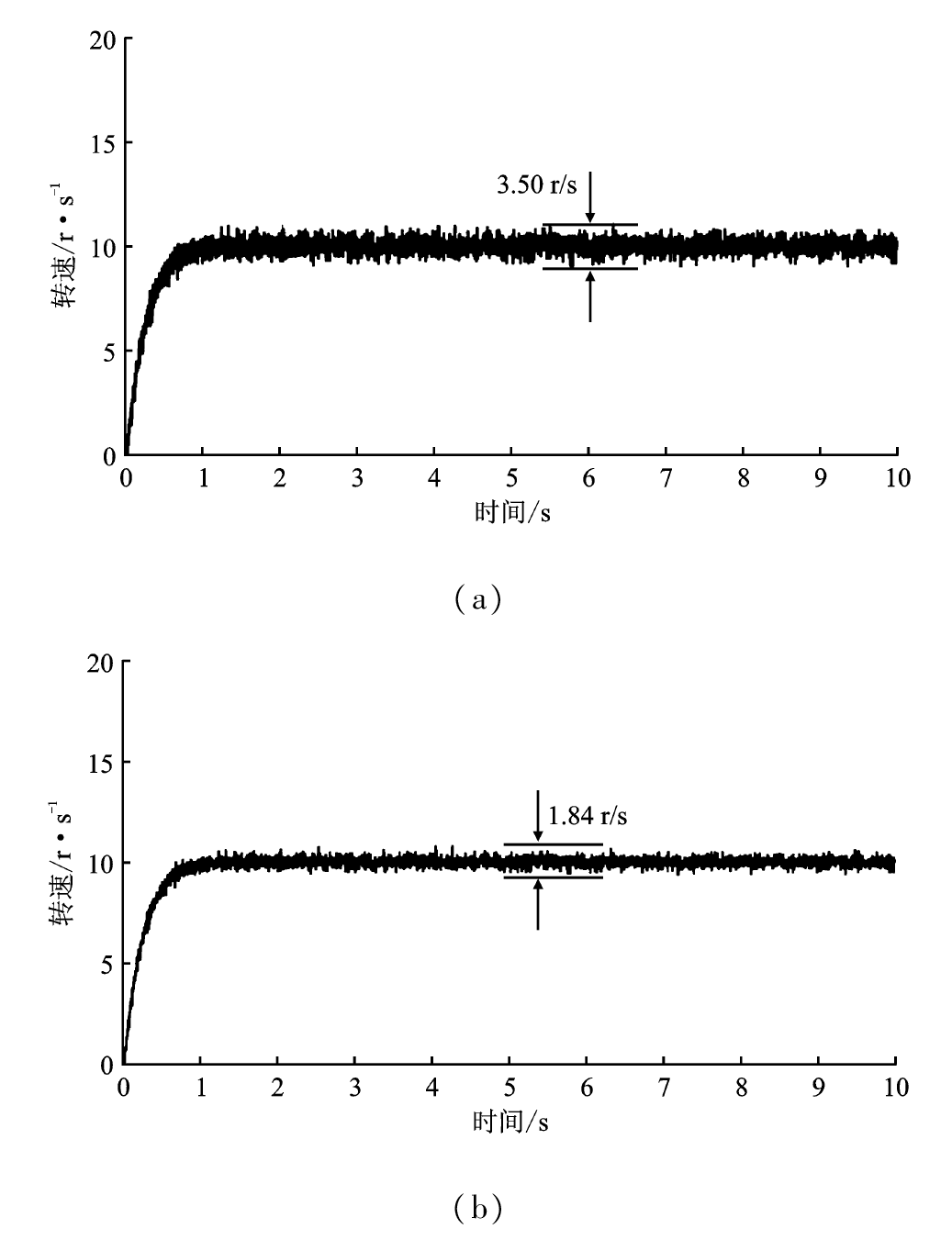
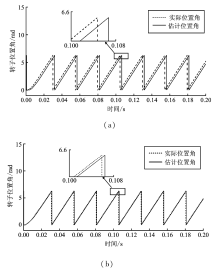
Figure 7.
Rotor position angle curves (a)Traditional first-order FSMO (b)HOT-FSMO based on a new tracking differentiator"
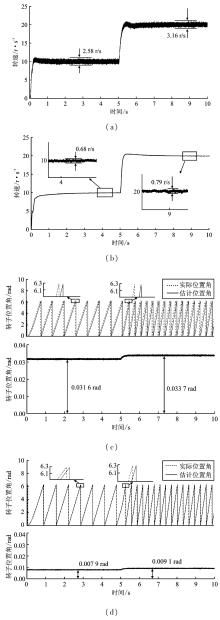
Figure 8.
Variable speed test results (a)Traditional first-order FSMO speed variation (b)HOT-FSMO speed variation based on a new tracking differentiator (c)Traditional first-order FSMO rotor position angle and position angle error (d)Position angle and position angle error of HOT-FSMO rotor based on a new tracking differentiator"
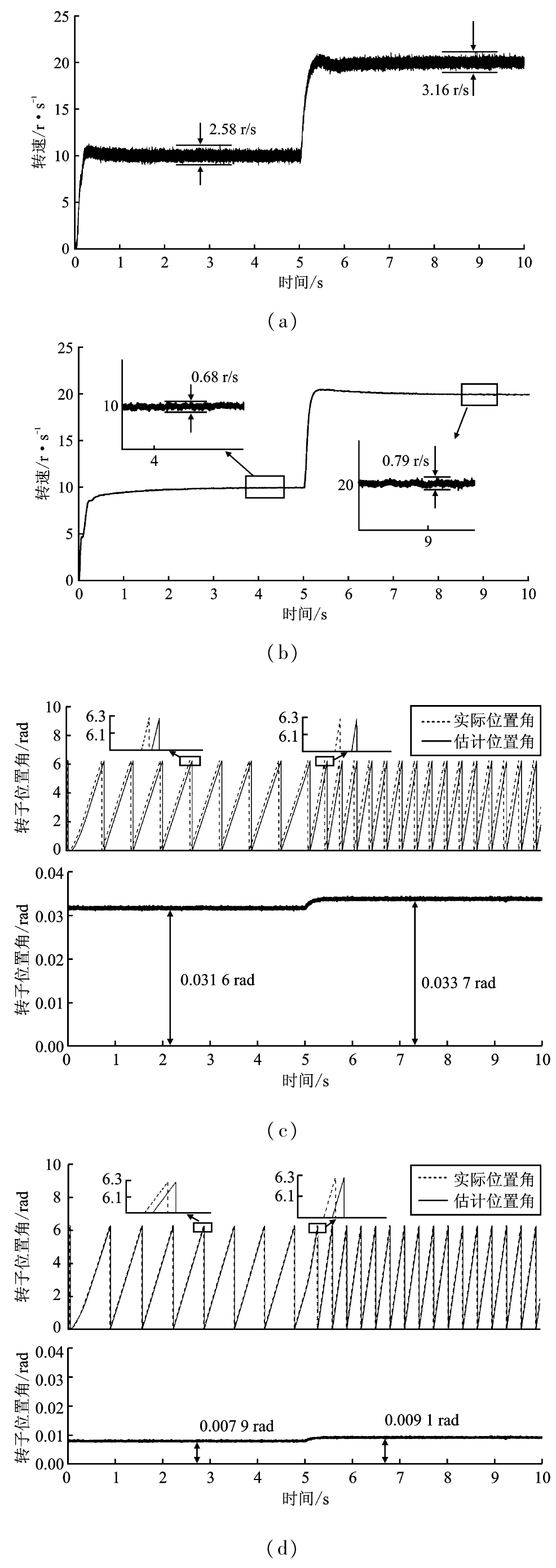

Figure 9.
Low speed variable load test results (a)Traditional first-order FSMO speed variation (b)HOT-FSMO speed variation based on a new tracking differentiator"
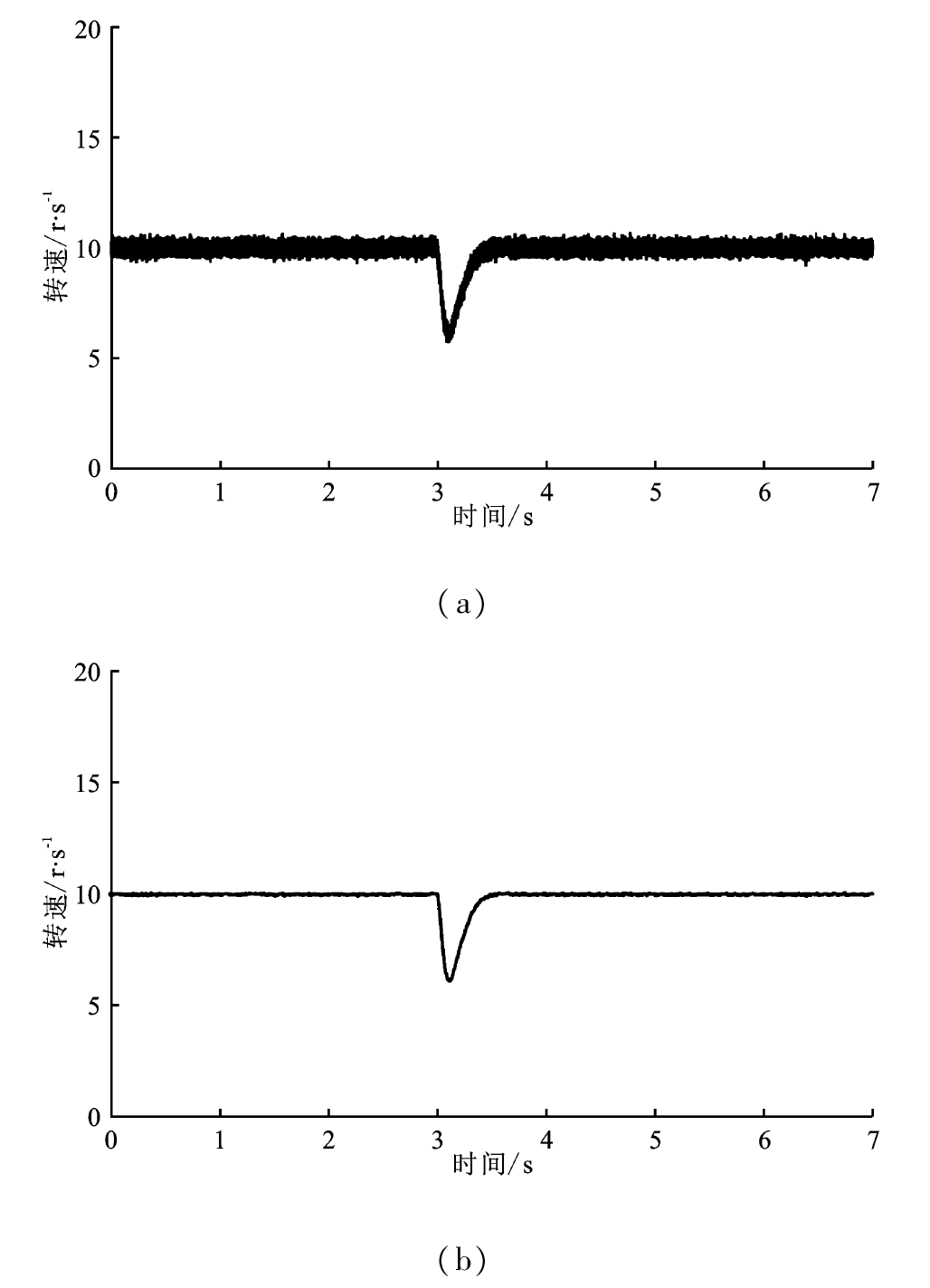

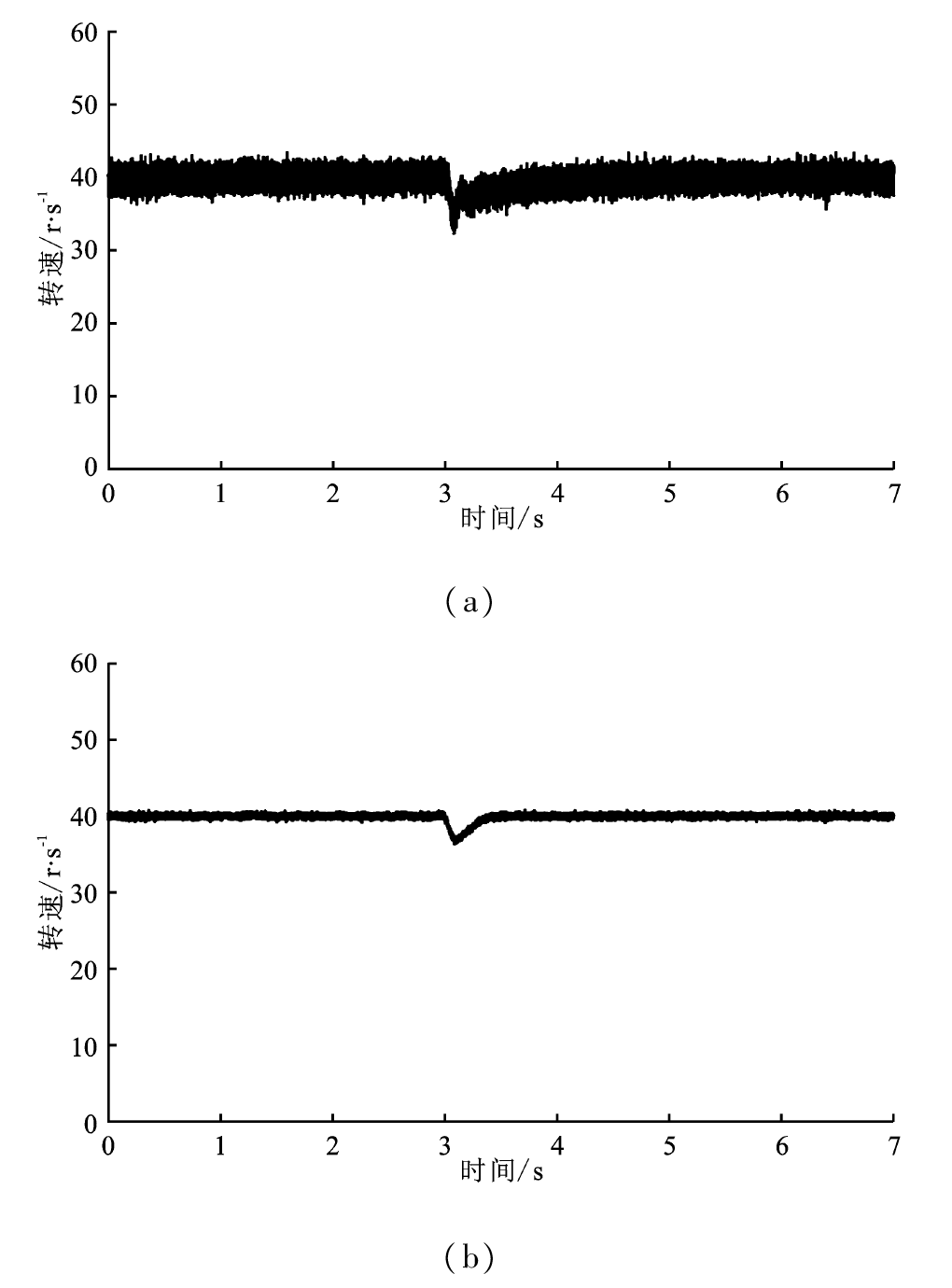
Figure 10.
High speed variable load test results (a)Traditional first-order FSMO speed variation (b)HOT-FSMO speed variation based on a new tracking differentiator"
| [1] | 周涛, 蒋全. 无传感器永磁同步电机全速范围控制技术综述[J]. 电子科技, 2021, 34(4):59-69. |
| Zhou Tao, Jiang Quan. Overview of sensorless control technology for full speed range permanent magnet synchronous motors[J]. Electronic Science and Technology, 2021, 34(4):59-69. | |
| [2] | 张旭, 王勃, 于泳, 等. 感应电机弱磁区转矩输出与电流动态性同步提升控制策略[J]. 中国电机工程学报, 2023, 43(10):3986-3994. |
| Zhang Xu, Wang Bo, Yu Yong, et al. Induction motor field-weakening control strategy for improvement of torque output and current dynamic[J]. Proceedings of the CSEE, 2023, 43(10):3986-3994. | |
| [3] | 李抑非, 蒋全. 永磁同步电机转子初始位置检测技术研究进展[J]. 电子科技, 2021, 34(4):24-33. |
| Li Yifei, Jiang Quan. Research development of initial rotor position detection of permanent magnet synchronous motors[J]. Electronic Science and Technology, 2021, 34(4):24-33. | |
| [4] | Zou Q, Li X X, Chen D. Observer based sliding mode control of PMSM speed regulation system with a novel reaching law[J]. IET Power Electronics, 2022, 15(10):886-900. |
| [5] | 王红然, 于宝明. 基于改进滑模观测器的PMSM无传感器矢量控制[J]. 电子技术与软件工程, 2022(19):92-95. |
| Wang Hongran, Yu Baoming. Sensorless vector control of PMSM based on improved sliding mode observer[J]. Electronic Technology and Software Engineering, 2022(19):92-95. | |
| [6] | Kim M, Choi C, Lee W. Performance improvement of PMSM current control using gain attenuation and phase delay compensated LPF[J]. Transactions of the Korean Society of Automotive Engineers, 2014, 22(2):107-114. |
| [7] | 仝兆景, 郑权, 韩耀飞, 等. 基于新滑模观测器的永磁同步电机无传感器控制[J]. 电子科技, 2021, 34(12):1-6,41. |
| Tong Zhaojing, Zheng Quan, Han Yaofei, et al. A novel sliding mode observer for position sensorless control of permanent magnet synchronous motor[J]. Electronic Science and Technology, 2021, 34(12):1-6,41. | |
| [8] | 张会林, 毕珂珂, 杨海马, 等. 基于LT-FOSMO的永磁同步电机抗负载扰动控制[J]. 控制工程, 2022, 29(12):2257-2264. |
| Zhang Huilin, Bi Keke, Yang Haima, et al. Antiload-dist-urbance control of permanent magnet synchronous motor based on LT-FOSMO[J]. Control Engineering of China, 2022, 29(12):2257-2264. | |
| [9] | Yin C, Huang X G, Chen Y Q, et al. Fractional-order exponential switching technique to enhance sliding mode control[J]. Applied Mathematical Modelling, 2017, 44(1):705-726. |
| [10] | Pai M C. Combining input shaping and adaptive super-twisting terminal sliding mode control for vibration suppression[J]. International Journal of Dynamics and Control, 2022:1-11. |
| [11] | 闵磊. 基于超螺旋滑模MRAS的PMSM无位置传感器控制方法[D]. 青岛: 青岛大学, 2021:65-78. |
| Min Lei. Sensorless control method of PMSM based on super spiral sliding mode MRAS[D]. Qingdao: Qingdao University, 2021:65-78. | |
| [12] | 姚国仲, 李涛, 郝剑, 等. 改进PLL的永磁同步电机无传感器控制研究[J]. 重庆理工大学学报(自然科学), 2022, 36(10):223-230. |
| Yao Guozhong, Li Tao, Hao Jian, et al. Research on sensorless control of permanent magnet synchronous motor with improved PLL[J]. Journal of Chongqing University of Technology(Natural Science), 2022, 36(10):223-230. | |
| [13] | 王明辉, 徐永向, 邹继斌. 基于ESO-PLL的永磁同步电机无位置传感器控制[J]. 中国电机工程学报, 2022, 42(20):7599-7608. |
| Wang Minghui, Xu Yongxiang, Zou Jibin. Sensorless control for permanent magnet synchronous motor based on ESO-PLL[J]. Proceedings of the CSEE, 2022, 42(20):7599-7608. | |
| [14] | 梅三冠, 卢闻州, 樊启高, 等. 基于滑模观测器误差补偿的永磁同步电机无位置传感器控制策略[J]. 电工技术学报, 2023, 38(2):398-408. |
| Mei Sanguan, Lu Wenzhou, Fan Qigao, et al. Sensorless control strategy of permanent magnet synchronous motor based on error compensation estimated by sliding mode observer[J]. Transactions of China Electrotechnical Society, 2023, 38(2):398-408. | |
| [15] | Wang G Q, Zhang H L. A new speed adaptive estimation method based on an improved flux sliding-mode observer for the sensorless control of PMSM drives[J]. ISA Transactions, 2022, 12(8):675-685. |
| [16] | 袁雷. 现代永磁同步电机控制原理及MATLAB仿真[M]. 北京: 北京航天航空大学出版社, 2016:117-122. |
| Yuan Lei. Control principle and MATLAB simulation of modern permanent magnet synchronous motor[M]. Beijing: Beijing University of Aeronautics and Astronautics Press, 2016:117-122. | |
| [17] | Wang L H, Liu S Y, Jiang S J, et al. A sliding mode control method based on improved reaching law for superbuck converter in photovoltaic system[J]. Energy Reports, 2022(8):574-585. |
| [18] | Wang B, Shao Y Z, Yu Y, et al. High-order terminal sliding-mode observer for chattering suppression and finite-time convergence in sensorless SPMSM drives[J]. IEEE Transactions on Power Electronics, 2021, 36(10):11910-11920. |
| [19] | 余佳乐, 赵峰, 高锋阳, 等. 基于两级滤波的PMSM模糊滑模观测器控制[J]. 电力电子技术, 2021, 55(1):9-12,29. |
| Yu Jiale, Zhao Feng, Gao Fengyang, et al. Fuzzy sliding mode observer control for PMSM based on two-stage filtering[J]. Power Electronics, 2021, 55(1):9-12,29. |
| [1] | CHEN Yibin, JIN Hai, XU Shen. Pulse High-Frequency Voltage Injection Method Based on Rotor Polarity Judgment Optimization [J]. Electronic Science and Technology, 2024, 37(6): 29-35. |
| [2] | YUAN Qingqing, WU Ruiqi, MA Ting, XIE Xiaotong. Simplified Model Predictive Current Control for the Six-Phase Full-Bridge Inverter Fed PMSM Drive [J]. Electronic Science and Technology, 2024, 37(3): 34-43. |
| [3] | ZHANG Lijuan,ZHANG Sai,SHEN Jiamin,GU Xin. Design of Broadband Sound Transmission Structure Based on Gradient Fluid-Solid Superlattice [J]. Electronic Science and Technology, 2023, 36(9): 58-65. |
| [4] | CAO Hongfang,WANG Xiaolei,DU Gaoming,LI Zhenmin,NI Wei. Design and FPGA Implementation of Dehazing Based on Channel Difference Model and Guided Filtering [J]. Electronic Science and Technology, 2023, 36(8): 1-6. |
| [5] | ZHU Lingtong,JIANG Quan. A Novel PMSM Load Torque and Moment of Inertia Identification Strategy [J]. Electronic Science and Technology, 2023, 36(6): 80-86. |
| [6] | BAI Yingqi,PALIDAN·Tuerxun . A Scientific Literature Recommendation Method Based on Multi-Task Learning [J]. Electronic Science and Technology, 2023, 36(4): 59-64. |
| [7] | WANG Xinyue,YU Huimin,HU Luning. Cooperative Localization of IMMKF and Chan-Taylor Algorithm [J]. Electronic Science and Technology, 2023, 36(12): 1-8. |
| [8] | HUANG Chengcheng,JIN Hai,LU Wenqi. Permanent Magnet Synchronous Motor Control Based on Super-Twisting Sliding Film Observer [J]. Electronic Science and Technology, 2023, 36(11): 8-13. |
| [9] | XU Zhijiang,TAN Kangbo,LI Min,ZHAO Ziwen,CHEN Tongshan. Research on EMI Synergy Analysis of New Energy Vehicle Motor Drive System [J]. Electronic Science and Technology, 2023, 36(10): 24-31. |
| [10] | LI Xiuwen,WANG Lei,REN Zhu. Security Detection of Extended Kalman Filter under Injection Attack [J]. Electronic Science and Technology, 2023, 36(10): 68-73. |
| [11] | YANG Yingying,LIU Xiang,SHI Yunyu. An Improved Obstacle Detection Method for AGV [J]. Electronic Science and Technology, 2022, 35(9): 1-6. |
| [12] | TONG Xiaosen,YANG Jinxian. Drilling Tool Acceleration Denoising Based on GRNN Network Adaptive Filtering [J]. Electronic Science and Technology, 2022, 35(7): 46-51. |
| [13] | WANG Peiyu,MA Lixin. Research on Permanent Magnet Synchronous Motor Servo System Based on Fuzzy Neural Network [J]. Electronic Science and Technology, 2022, 35(6): 83-88. |
| [14] | DAI Jiangtao,GAO Bo,WAN Jiajun. Design of DDS Communication Middleware for Resource Limited Devices [J]. Electronic Science and Technology, 2022, 35(5): 47-55. |
| [15] | Sunyun YANG,Xiu KAN. Design of Biological Behavior Analysis System Based on Vision and IMU Sensors [J]. Electronic Science and Technology, 2022, 35(4): 28-34. |
|
||
