Electronic Science and Technology ›› 2024, Vol. 37 ›› Issue (8): 54-59.doi: 10.16180/j.cnki.issn1007-7820.2024.08.008
Previous Articles Next Articles
JIN Rui, JIN Hai, MO Songnan
Received:2023-02-22
Online:2024-08-15
Published:2024-08-21
Supported by:CLC Number:
JIN Rui, JIN Hai, MO Songnan. Research on Large Twin-Rotor UAV Based on Fuzzy PID[J].Electronic Science and Technology, 2024, 37(8): 54-59.

Figure 1.
The structure of tandem twin-rotor UAV"
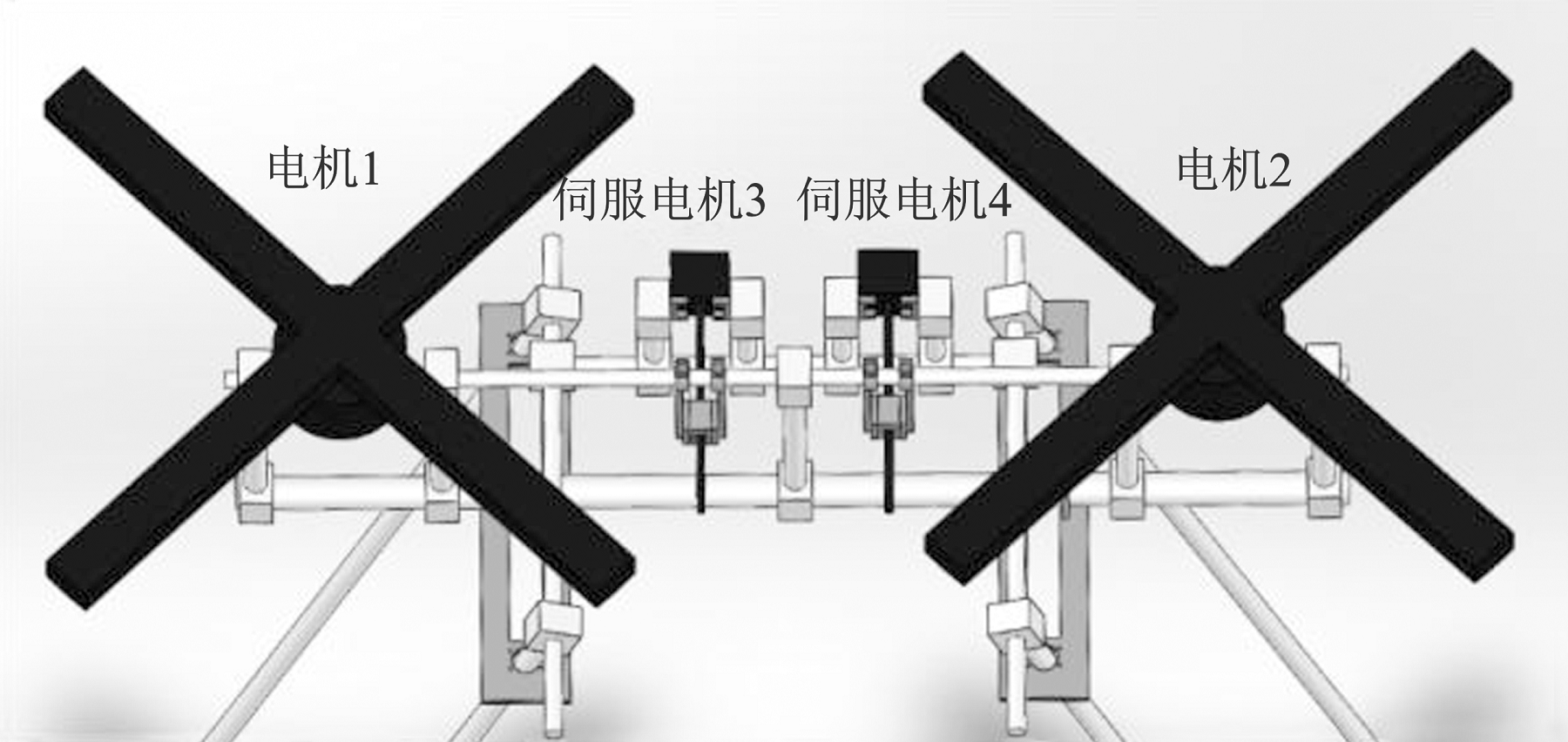
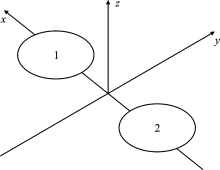
Figure 2.
Carrier coordinate system"
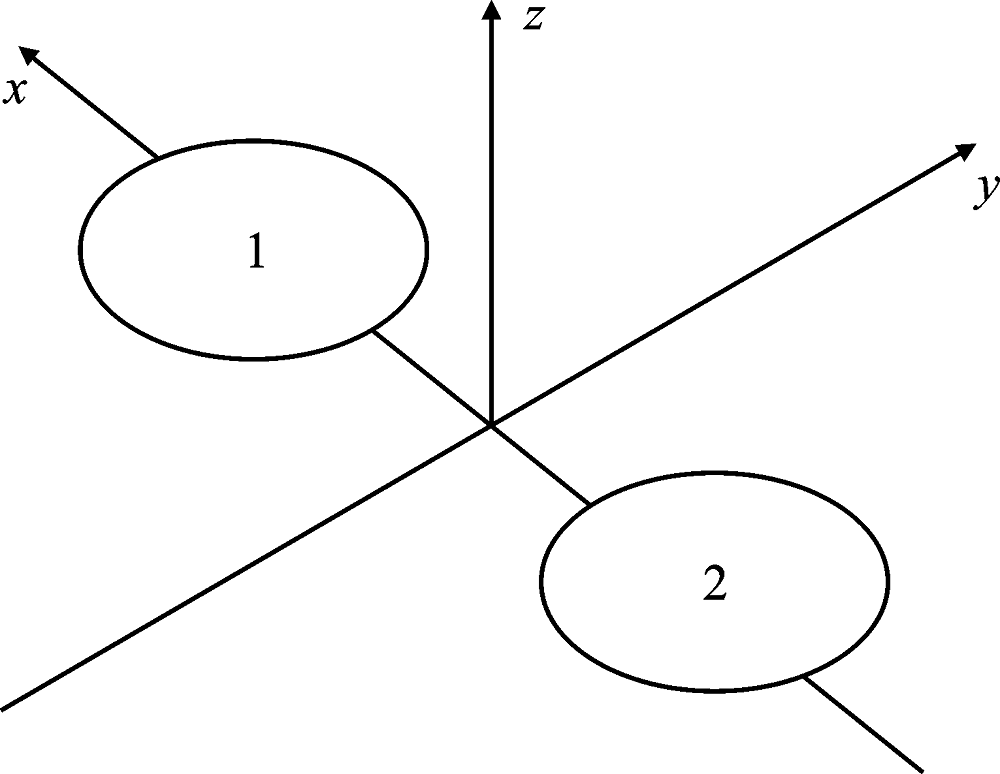
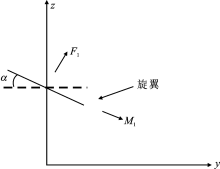
Figure 3.
Rotor power composition"
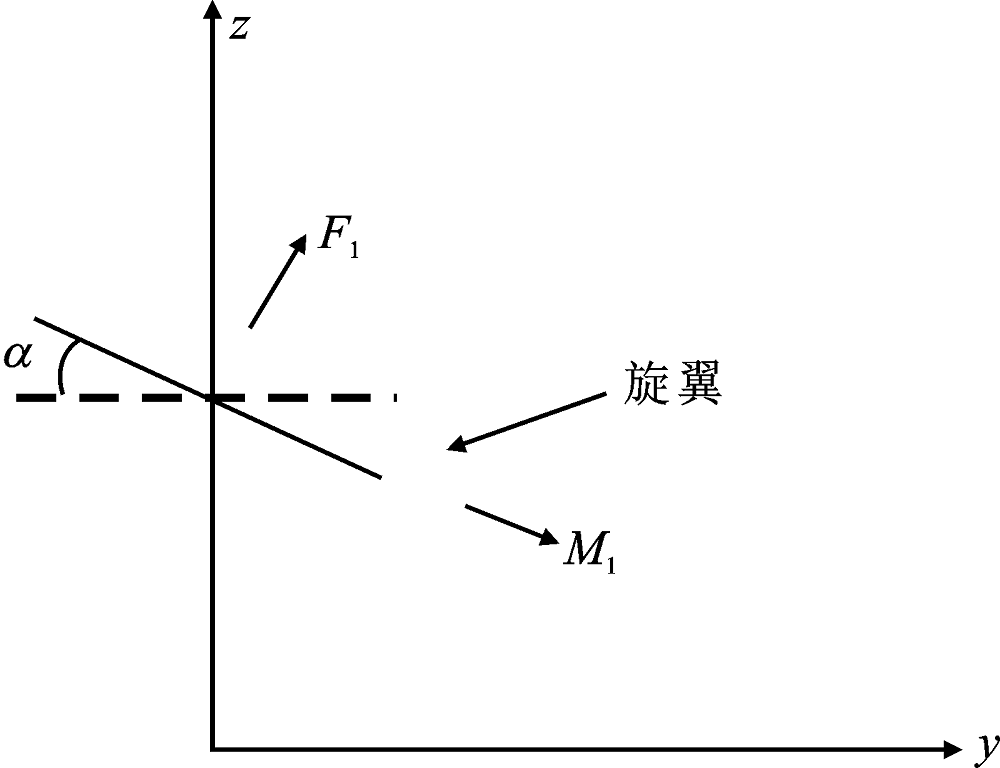
Figure 4.
The principle of domain change"
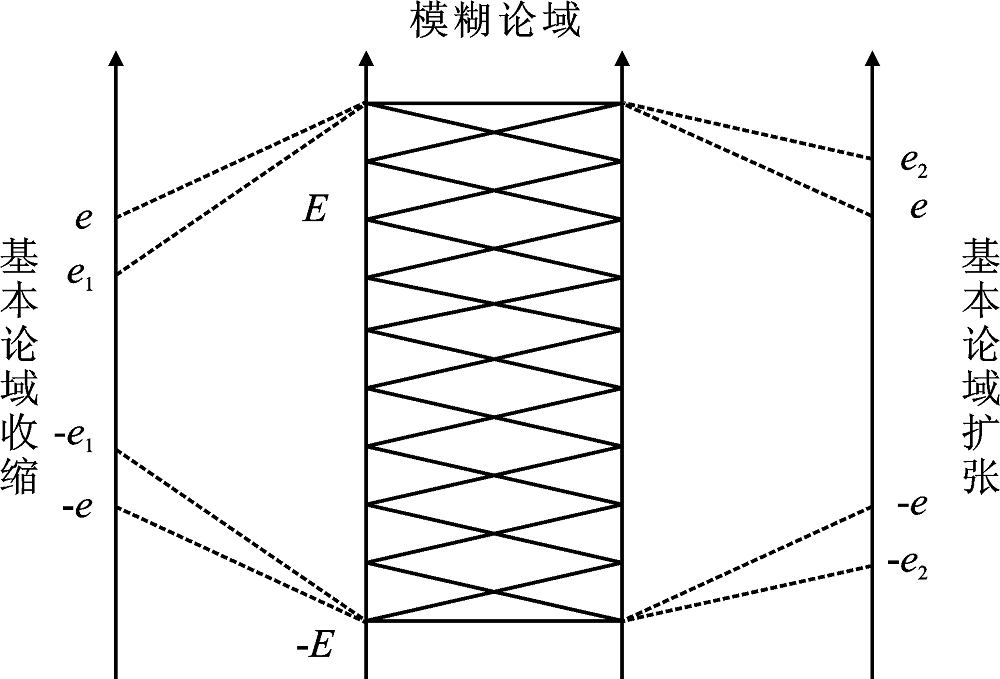
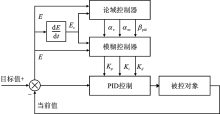
Figure 5.
Variable universe fuzzy control"
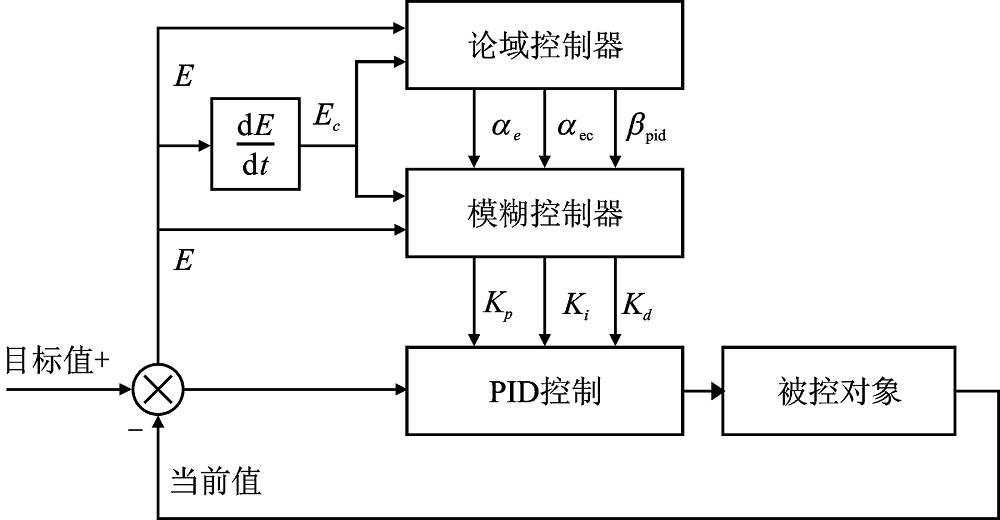
Table 1.
Kp fuzzy rules"
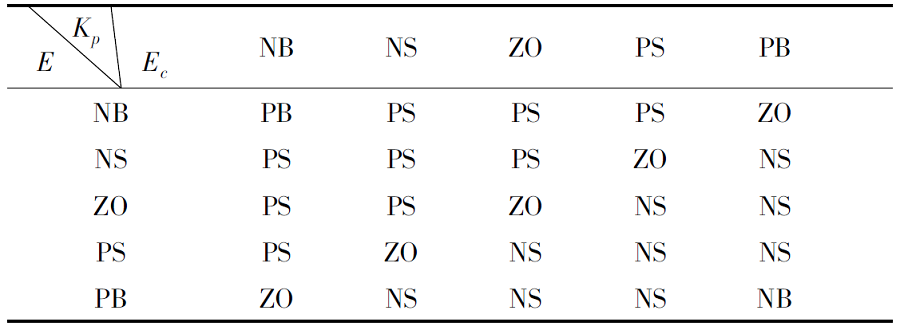 |
Table 2.
Ki fuzzy rules"
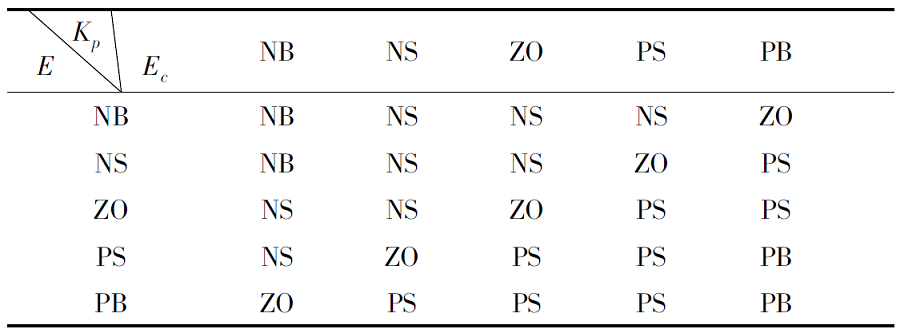 |
Table 3.
Kd fuzzy rules"
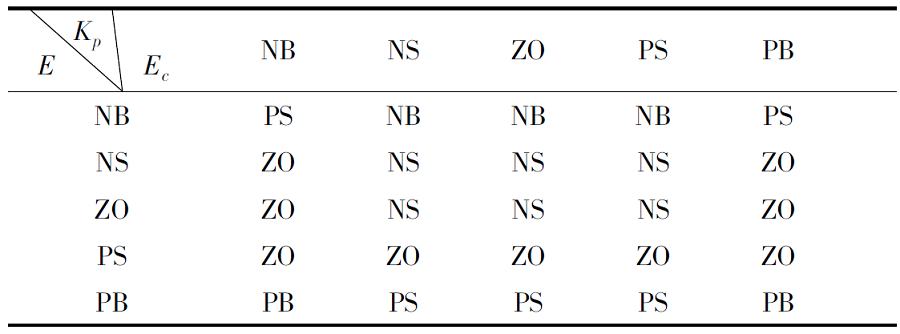 |
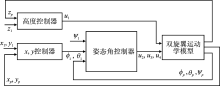
Figure 6.
Control structure of dual-rotor UAV"
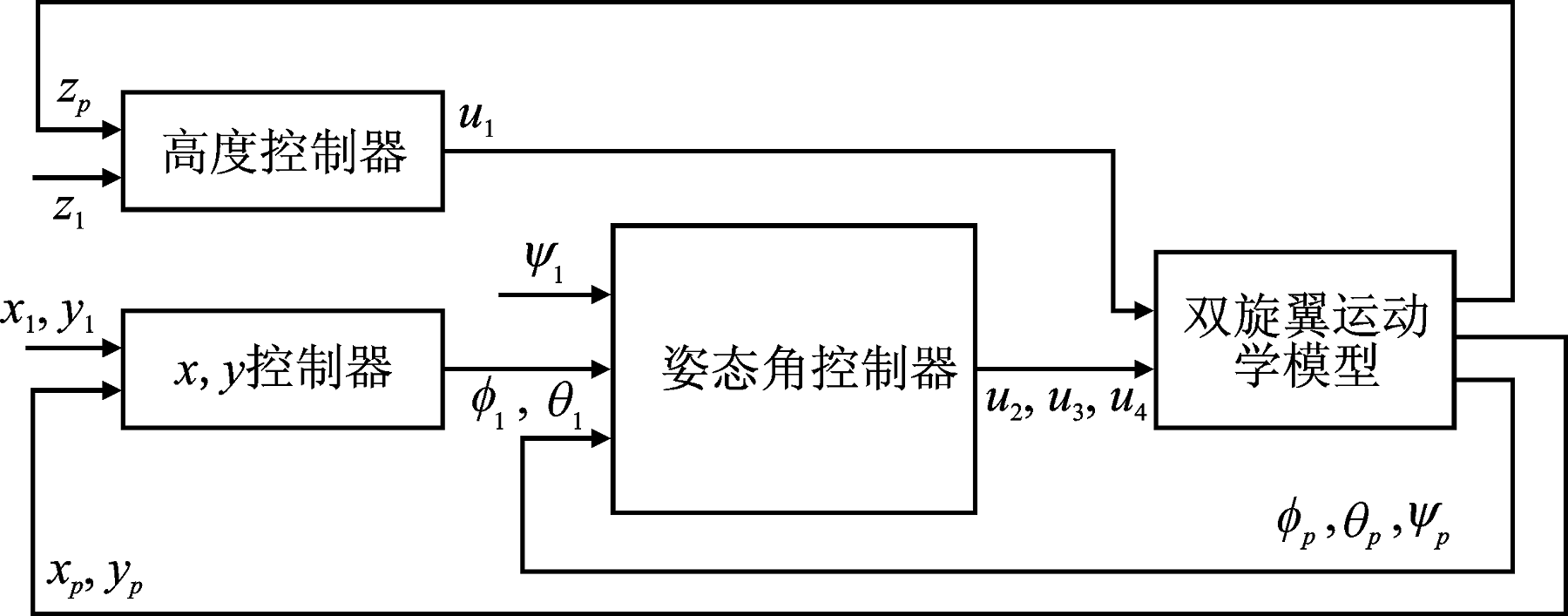
Table 4.
UAV parameters"
| 参数 | 数值 | 单位 |
|---|---|---|
| Jx | 4.885 | kg·m2 |
| Jy | 7.034 | kg·m2 |
| Jz | 0.195 | kg·m2 |
| m | 19.542 | kg |
| g | 9.810 | m·s-2 |
| l | 0.500 | m |
| CT | 1.156×10-5 | N·s2 |
| CM | 2.531×10-10 | N·m·s2 |
Figure 7.
Displacement change curve in X-axis direction"
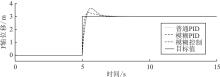
Figure 8.
Displacement change curve in Y-axis direction"
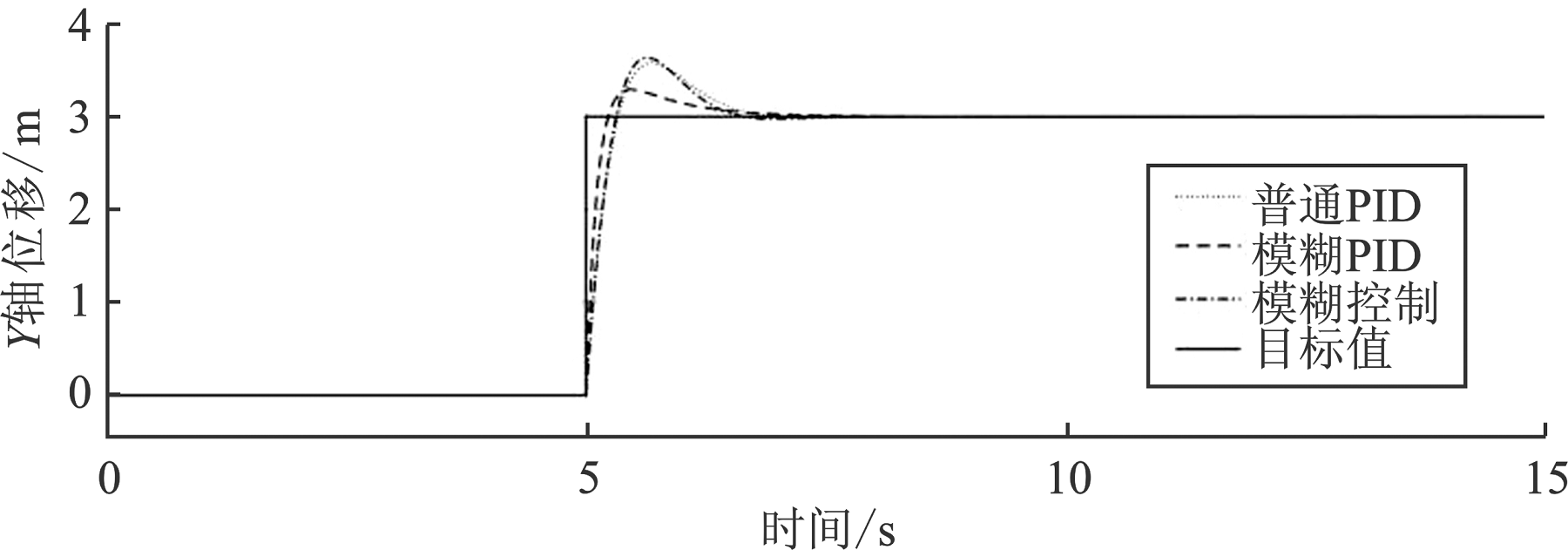

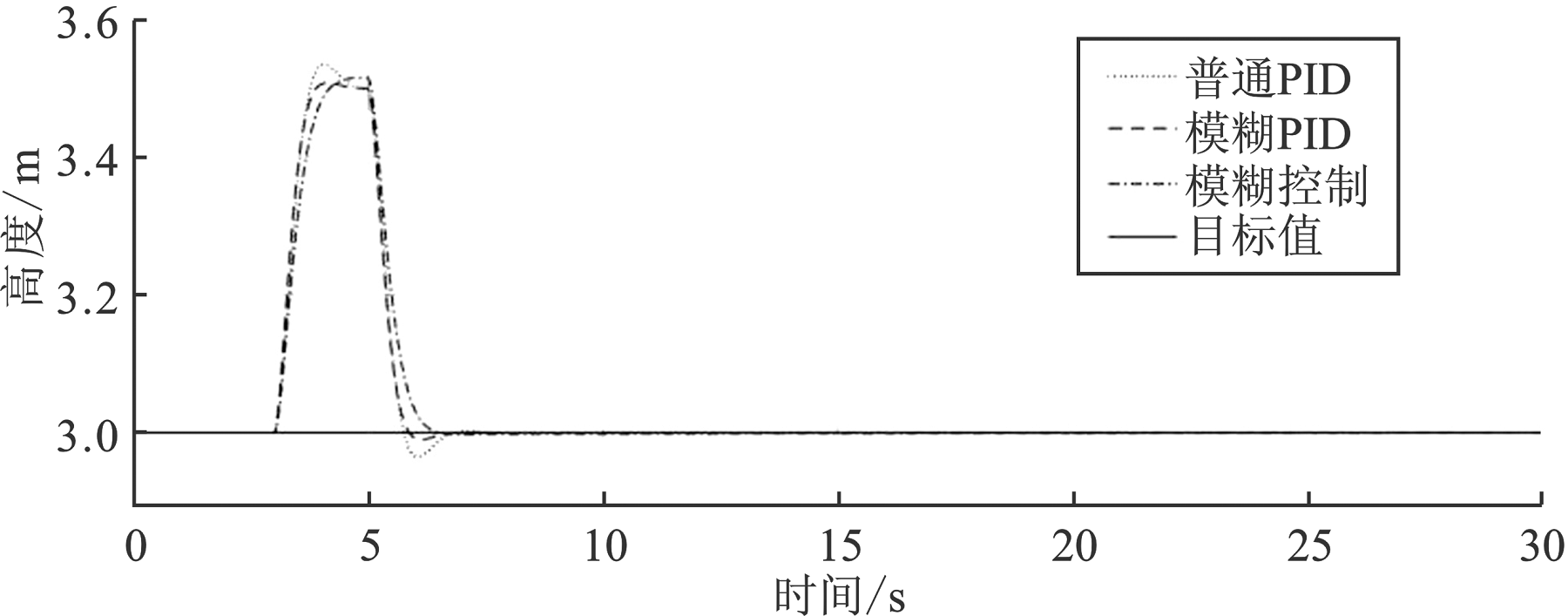
Figure 9.
Displacement change curve in Z-axis direction"
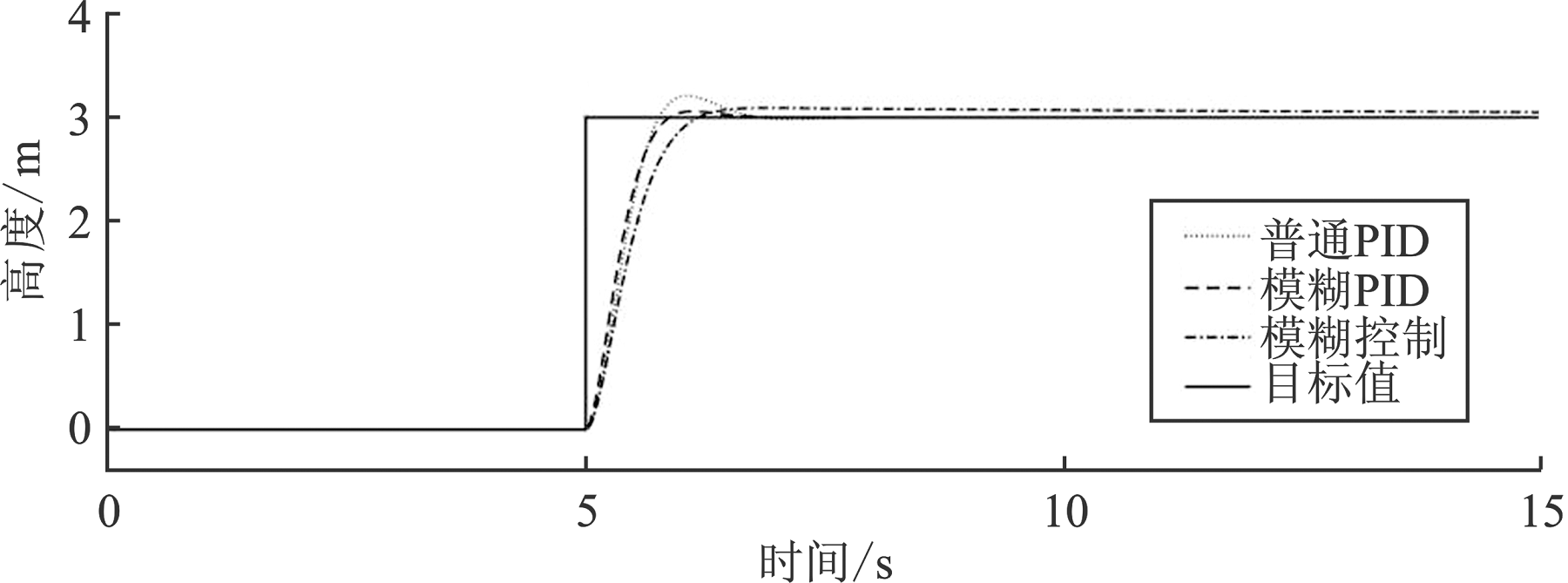
Figure 10.
Three-dimensional motion simulation of twin-rotor"
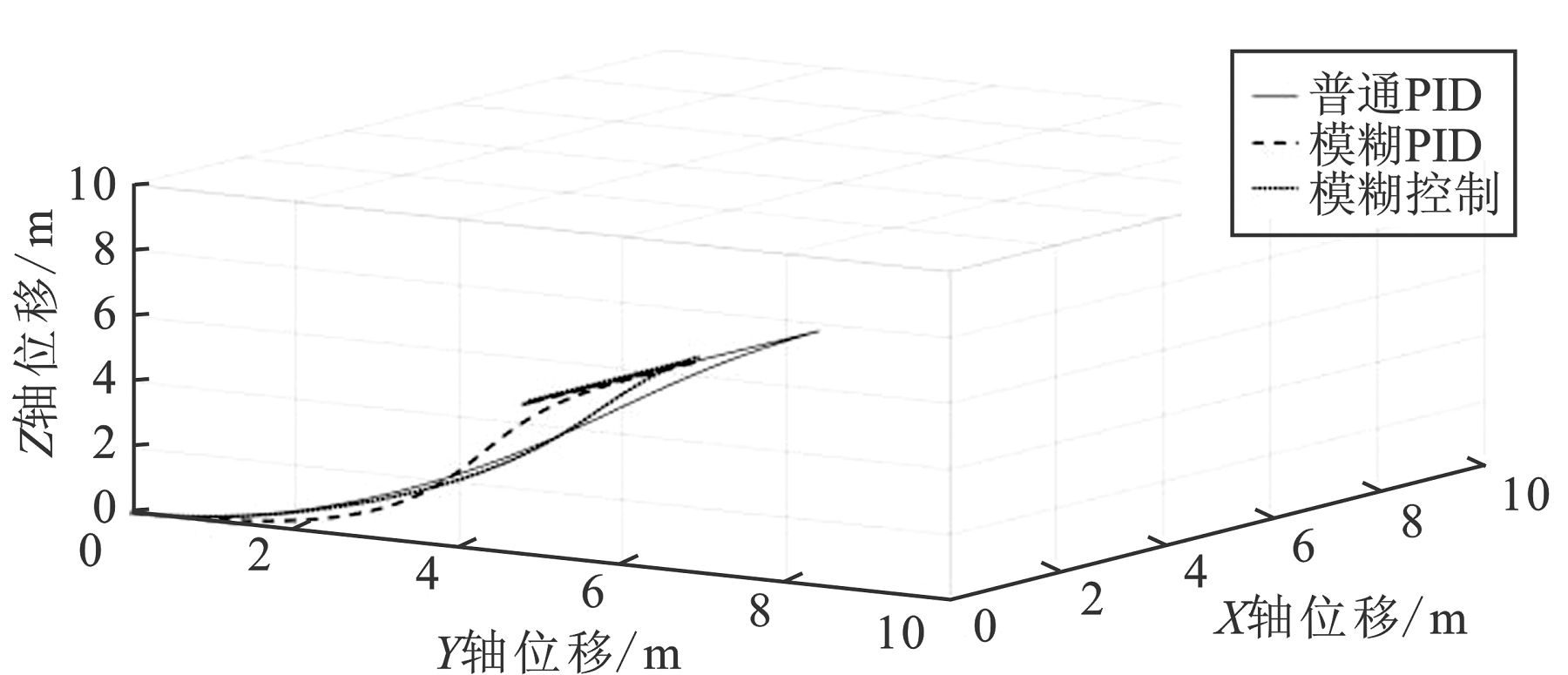
Figure 11.
Displacement change curve in X-axis direction under interference"
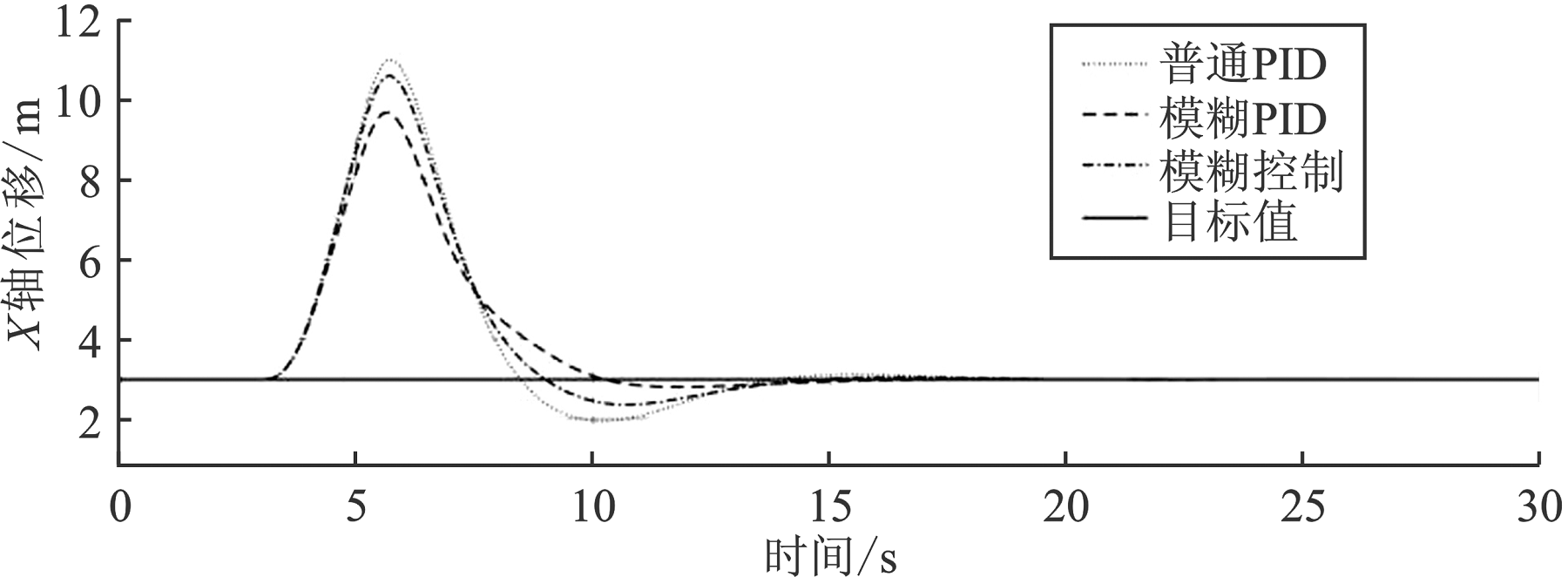
Figure 12.
Displacement change curve in Y-axis direction under interference"
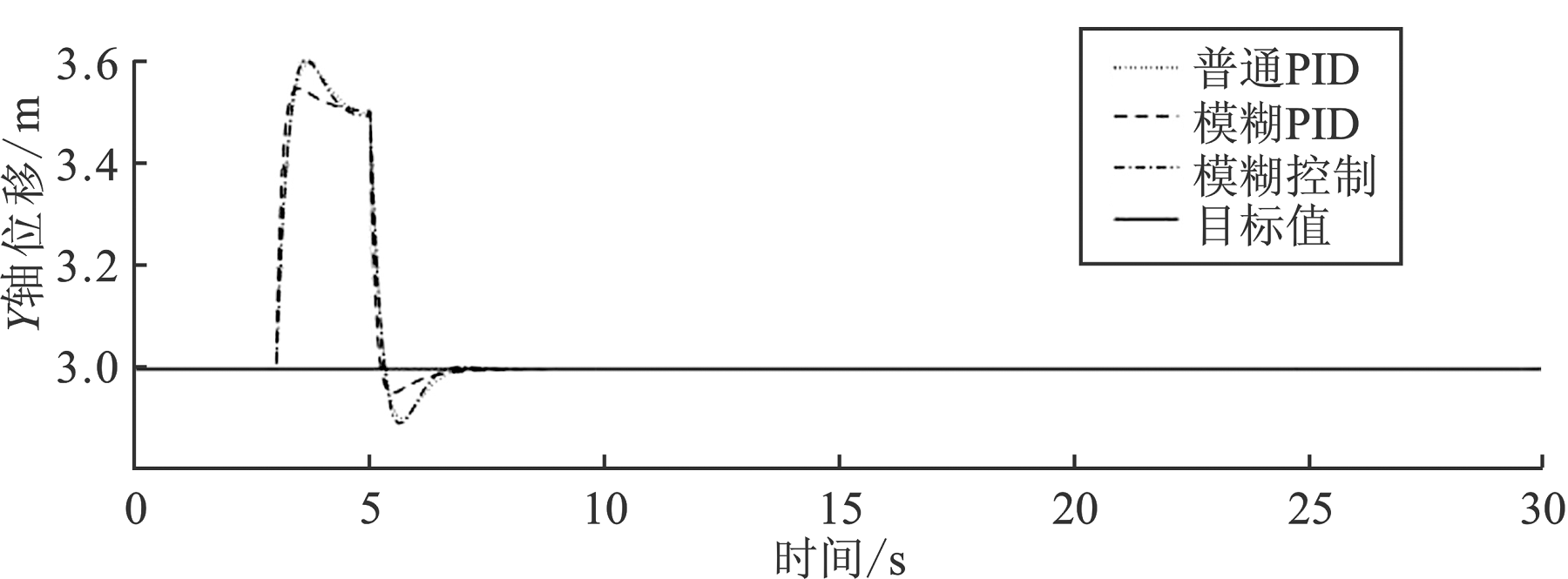
Figure 13.
Displacement change curve in Z-axis direction under interference"
| [1] | 郗来迎, 赵赫男, 王松波, 等. 基于倾斜摄影技术的无人机电力巡检设计[J]. 电子科技, 2019, 32(5):85-88. |
| Xi Laiying, Zhao Henan, Wang Songbo, et al. The design of unmanned aerial vehicle power patrol based on oblique photography technology[J]. Electronic Science and Technology, 2019, 32(5):85-88. | |
| [2] | 梅武军, 伍家成, 杨扬戬, 等. 基于ROS系统的多旋翼自主飞行控制系统[J]. 电子科技, 2017, 30(7):106-109. |
| Mei Wujun, Wu Jiacheng, Yang Yangjian, et al. Multi rotor autonomous flight control system based on the ROS system[J]. Electronic Science and Technology, 2017, 30(7):106-109. | |
| [3] | 赵杰. 基于模型的多旋翼飞行器飞控系统设计与实现[D]. 成都: 电子科技大学, 2019:20-35. |
| Zhao Jie. Design and implementation of multirotor aircraft flight control system based on model[D]. Chengdu: University of Electronic Science and Technology of China, 2019:20-35. | |
| [4] | 何志辉, 高万林, 何雄奎, 等. 纵列式无人直升机飞行控制系统设计[J]. 江苏大学学报(自然科学版), 2023, 44(1):37-44. |
| He Zhihui, Gao Wanlin, He Xiongkui, et al. Flight control system design of tandem unmanned helicopter[J]. Journal of Jiangsu University(Natural Science Edition), 2023, 44(1):37-44. | |
| [5] | 严强强. 纵列式双旋翼无人直升机飞行控制研究[D]. 南京: 南京航空航天大学, 2018:32-55. |
| Yan Qiangqiang. Research on flight control ofan unmanned tandem rotor helicopter[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2018:32-55. | |
| [6] |
杨立本, 魏文军, 杨剑锋, 等. 横列式双旋翼矢量飞行器的改进ADRC姿态控制算法[J]. 系统工程与电子技术, 2021, 43(10):2976-2983.
doi: 10.12305/j.issn.1001-506X.2021.10.33 |
|
Yang Liben, Wei Wenjun, Yang Jianfeng, et al. Improved ADRC attitude control algorithm for tilting dualfan vector aircraft[J]. Systems Engineering and Electronics, 2021, 43(10):2976-2983.
doi: 10.12305/j.issn.1001-506X.2021.10.33 |
|
| [7] | Zheng R, Gu F, Liu Z, et al. Controller design and flight experiments for the dual tilt rotor unmanned aerial vehicle in helicopter mode[C]. Athens: International Conference on Unmanned Aircraft Systems, 2020:845-853. |
| [8] | 廖坤男. 四旋翼无人机姿态解算与控制方法研究[D]. 绵阳: 西南科技大学, 2022:25-33. |
| Liao Kunnan. Research on estimation and control method of quadrotor UAV[D]. Mianyang: Southwest University of Science and Technology, 2022:25-33. | |
| [9] | 殷明. 四旋翼植保无人机嵌入式飞控系统研究与设计[D]. 苏州: 苏州大学, 2021:11-17. |
| Yin Ming. Research and design of embedded flight control system for quadrotor plant protection UAV[D]. Suzhou: Soochow University, 2021:11-17. | |
| [10] | 崔道旺, 柳向斌. 四旋翼飞行器全控制算法研究[J]. 控制工程, 2017, 24(10):2038-2044. |
| Cui Daowang, Liu Xiangbin. Full control algorithm study of quadrotor aircraft[J]. Control Engineering of China, 2017, 24(10):2038-2044. | |
| [11] | 张德华, 张腾龙. 基于模糊推理参数优化的无人机自适应PID控制[J]. 河南大学学报(自然科学版), 2021, 51(5):554-562. |
| Zhang Dehua, Zhang Tenglong. Adaptive PID control of UAV based on fuzzy inference with parameter optimization[J]. Journal of Henan University(Natural Science Edition), 2021, 51(5):554-562. | |
| [12] | 宋一可. 基于改进模糊PID的无人直升机姿态与高度控制方法研究[D]. 南京: 南京航空航天大学, 2020:37-53. |
| Song Yike. Research on attitude and altitude control method of unmanned helicopter based on improved fuzzy PID[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2020:37-53. | |
| [13] | 戚英杰, 李雪林, 孙玉坤. 基于模糊算法的回流焊温度系统仿真设计[J]. 控制工程, 2022, 29(9):1613-1618. |
| Qi Yingjie, Li Xuelin, Sun Yukun. Simulink design of fuzzy algorithm in temperature system of reflow soldering furnace[J]. Control Engineering of China, 2022, 29(9):1613-1618. | |
| [14] | 姜艳茹. 基于变论域模糊PID的四旋翼无人机控制系统研究[D]. 太原: 中北大学, 2021:46-65. |
| Jiang Yanru. Research on control system of quadrotor UAV based on variable universe fuzzy PID[D]. Taiyuan: North University of China, 2021:46-65. | |
| [15] | 刘洋, 行鸿彦, 侯天浩. 四旋翼无人机串级变论域模糊PID姿态控制研究[J]. 电子测量与仪器学报, 2019, 33(10):46-52. |
| Liu Yang, Xing Hongyan, Hou Tianhao. Research on attitude control of cascade variable universe fuzzy PID for quadrotor UAV[J]. Journal of Electronic Measurement and Instrumentation, 2019, 33(10):46-52. | |
| [16] | Zeng W, Jiang Q, Xie J, et al. A functional variable universe fuzzy PID controller for load following operation of PWR with the multiple model[J]. Annals of Nuclear Energy, 2020, 14(2):7174-7182. |
| [17] | Stopforth R, Davrajh S, Ferrein A. Design considerations of the duo fugam dual rotor UAV[C]. Bloemfontein:Pattern Recognition Association of South Africa and Robotics and Mechatronics, 2017:7-13. |
| [18] | 陈立, 詹跃东. 基于变论域模糊PID的PEMFC温度控制[J]. 电子测量技术, 2020, 43(7):1-5. |
| Chen Li, Zhan Yuedong. PEMFC temperature control based on variable universe fuzzy PID[J]. Electronic Measurement Technology, 2020, 43(7):1-5. |
| [1] | DING Xiangxin,ZHANG Wei,WANG Yagang. PID Controller Tuning of Time Delay Integral System Based on Multi Dominant Pole Method [J]. Electronic Science and Technology, 2023, 36(8): 56-64. |
| [2] | WEI Shenghui,HAO Zhenghang,CHEN Zhuo. Research on MMC Circulation Suppression Strategy Based on SOGI [J]. Electronic Science and Technology, 2023, 36(7): 16-23. |
| [3] | YUAN Zhenbo,BAI Bo,ZHANG Xiaowei,LUO Liujun,SHANG Tao. Automatic Alignment System for Visible Light Communication Based on Image Processing [J]. Electronic Science and Technology, 2023, 36(6): 8-15. |
| [4] | ZHU Mingji,ZHANG Huilin,MA Lixin. Control Strategy of Ammonia Desulfurization Based on Smith Predictive Fuzzy PID [J]. Electronic Science and Technology, 2023, 36(5): 80-87. |
| [5] | XIA Zihao,LI Yudong. Research on Control Strategy of Single-Phase Grid-Connected Inverter Based on dSPACE [J]. Electronic Science and Technology, 2023, 36(3): 62-68. |
| [6] | SUN Sinan,HAO Zhenghang. Research on Battery Grid Connection Based on Voltage and Current Double Loop Control [J]. Electronic Science and Technology, 2023, 36(2): 13-21. |
| [7] | HU Tao,JIANG Quan. PID Parameter Tuning Based on Improved Honey Badger Optimization Algorithm [J]. Electronic Science and Technology, 2023, 36(12): 46-54. |
| [8] | WANG Zhongyang,YAO Lei,LI Tianhao,GAO Shang. Circulating Current Suppression Strategy for MMC-HVDC Converter Station under Asymmetric Grid Voltage [J]. Electronic Science and Technology, 2023, 36(11): 66-75. |
| [9] | XU Bangxian,LIU Xiaobo,HAN Xiangmin,QIU Zhi,TANG Hui,FAN Jinwei. Parameter Optimization Design Method of Coupled Inductor Zeta Converter [J]. Electronic Science and Technology, 2023, 36(1): 88-94. |
| [10] | SUN Sinan,HAO Zhenghang. Photovoltaic Grid-Connected System Based on Adaptive VSG Control [J]. Electronic Science and Technology, 2022, 35(9): 22-29. |
| [11] | SUN Xiang,PEI Xiaofang,ZHOU Wang,ZHU Ping. Crop Height Measurement Based on Ruler Image Recognition [J]. Electronic Science and Technology, 2022, 35(7): 32-39. |
| [12] | ZHANG Chongchong,HUANG Yayu. A GA-BP Neural Network for Predicting the Structure of Leaf Tobacco [J]. Electronic Science and Technology, 2022, 35(6): 35-42. |
| [13] | WANG Peiyu,MA Lixin. Research on Permanent Magnet Synchronous Motor Servo System Based on Fuzzy Neural Network [J]. Electronic Science and Technology, 2022, 35(6): 83-88. |
| [14] | LI Meng,MA Lixin. Research on Predictive Ammonia Desulfurization Control System [J]. Electronic Science and Technology, 2022, 35(5): 60-65. |
| [15] | Meiyi QI,Aihua LIAO. Design of Reliability Evaluation System of Traction Motor Rolling Bearing Based on MATLAB App Designer [J]. Electronic Science and Technology, 2022, 35(3): 79-86. |
|
||
