Electronic Science and Technology ›› 2019, Vol. 32 ›› Issue (12): 37-43.doi: 10.16180/j.cnki.issn1007-7820.2019.12.008
Previous Articles Next Articles
CHEN Jiupeng,SAN Hongjun,LI Pengfei,ZHANG Daoyi,XIONG Binzhou
Received:2018-12-11
Online:2019-12-15
Published:2019-12-24
Supported by:CLC Number:
CHEN Jiupeng,SAN Hongjun,LI Pengfei,ZHANG Daoyi,XIONG Binzhou. Kinematics Analysis and Simulation for a Novel 5-DOF Serial-Parallel Robot[J].Electronic Science and Technology, 2019, 32(12): 37-43.
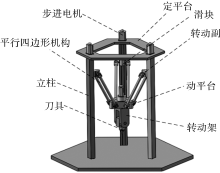
Figure 1.
Three-dimensional model of parallel-series robot"
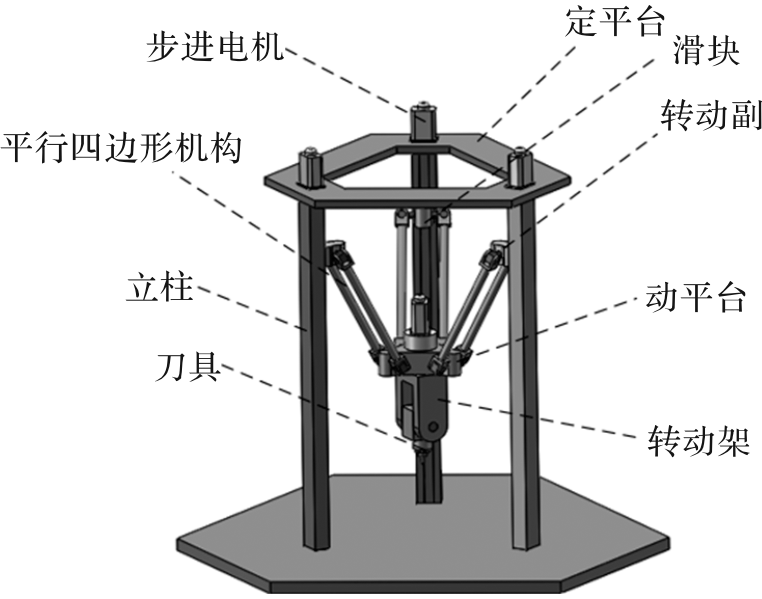
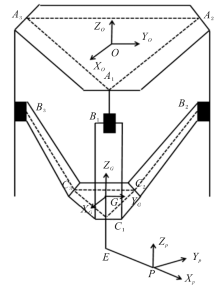
Figure 2.
Robot structure sketch"
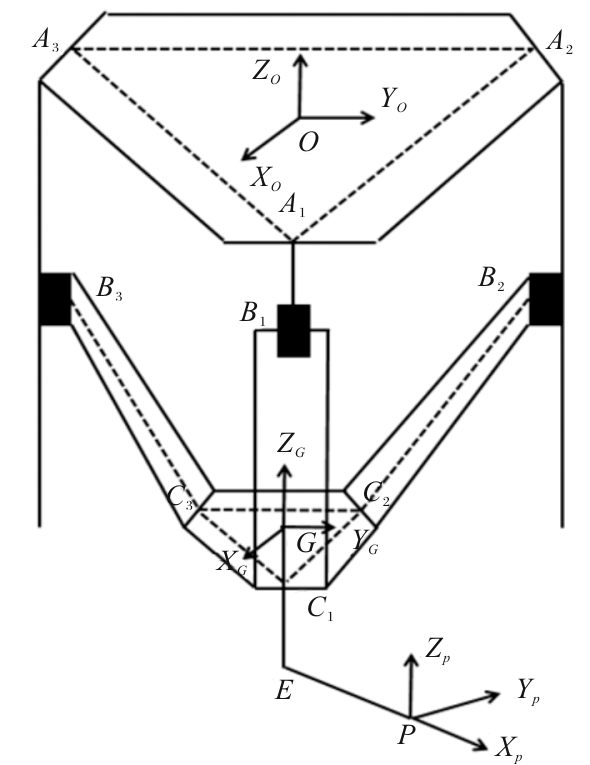
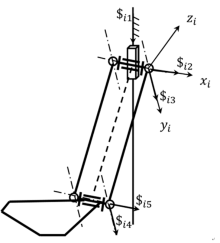
Figure 3.
Screw system of the limb"
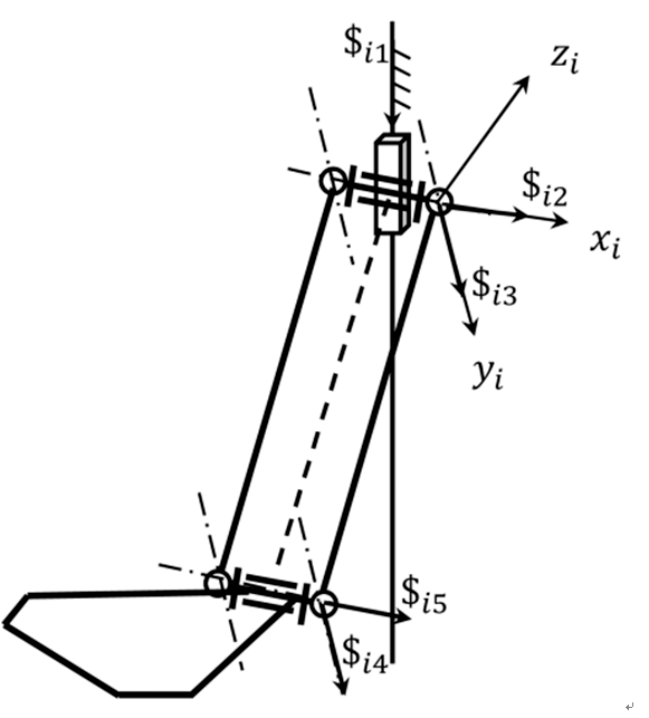
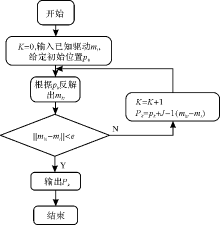
Figure 4.
Flow chart of forward solution"
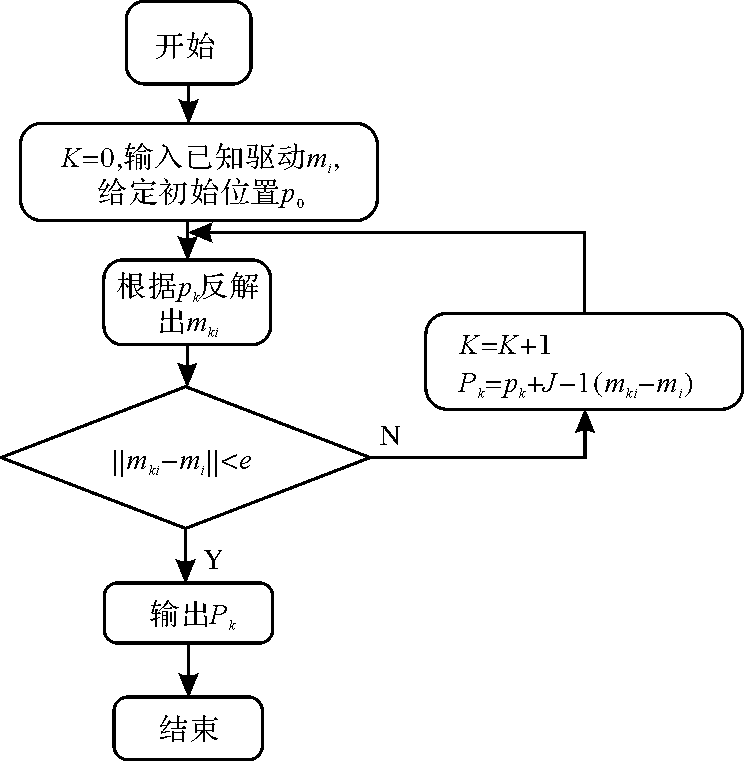
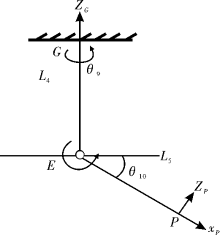
Figure 5.
Restrictive condition in the serial part"
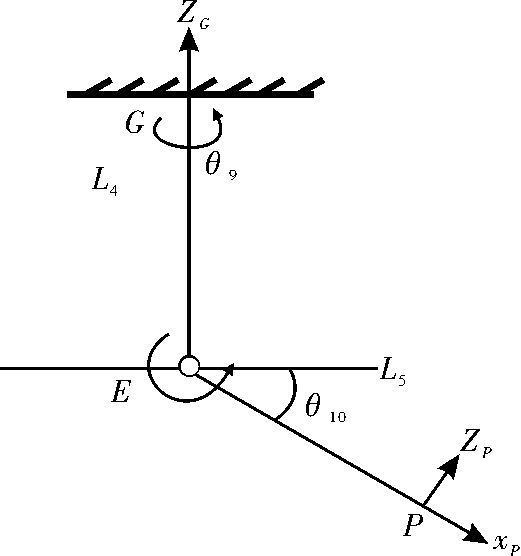
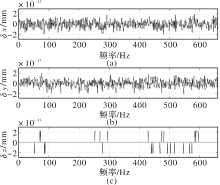
Figure 6.
Error analysis between both the kinematics algorithms"
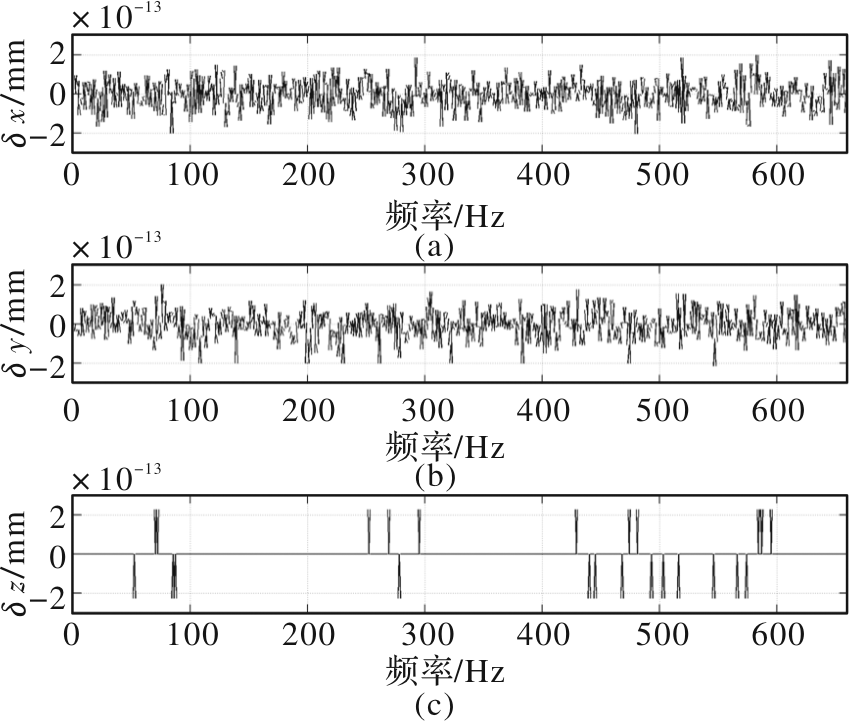
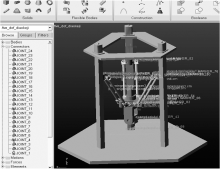
Figure 7.
Prototype model with adding motion pairs"
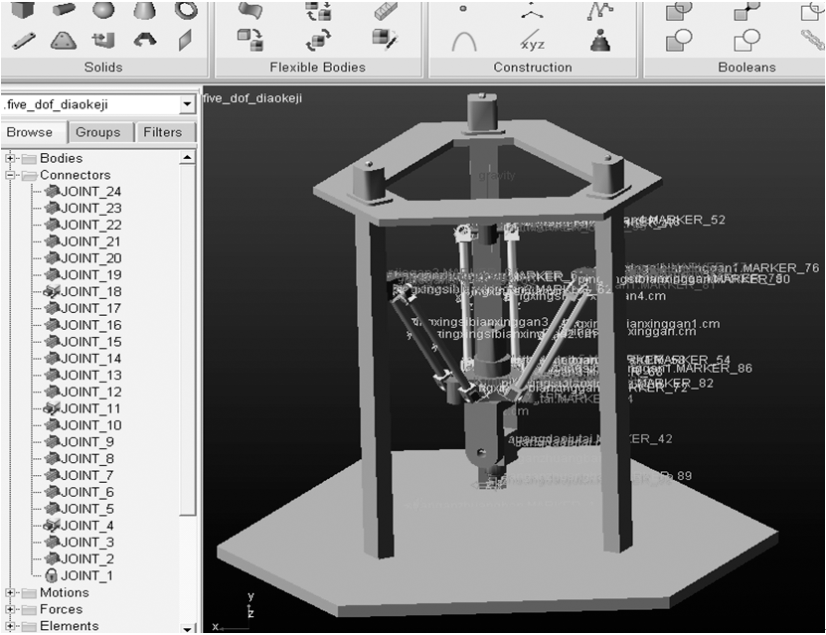
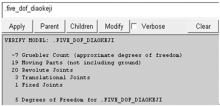
Figure 8.
Model self-checking information table"
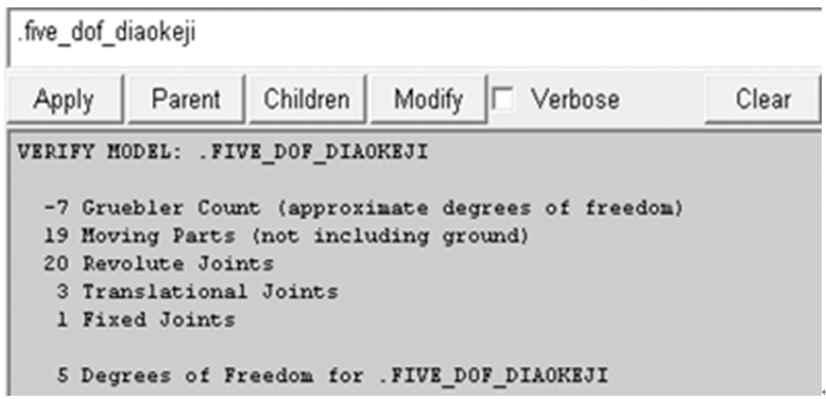
Figure 9.
Addition of driver function"
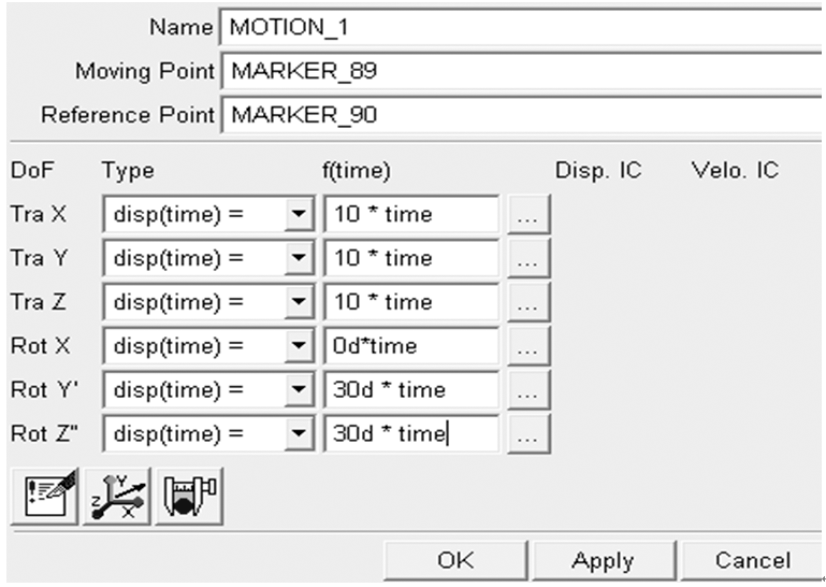

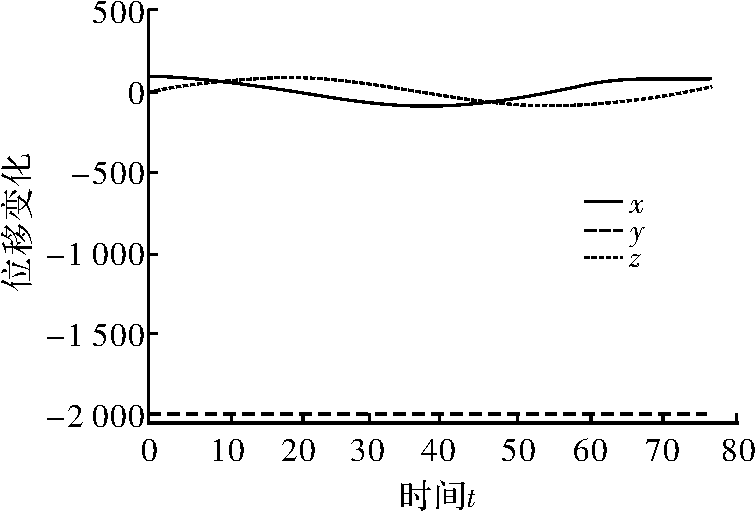
Figure 10.
Variation of mobile platform at different times"
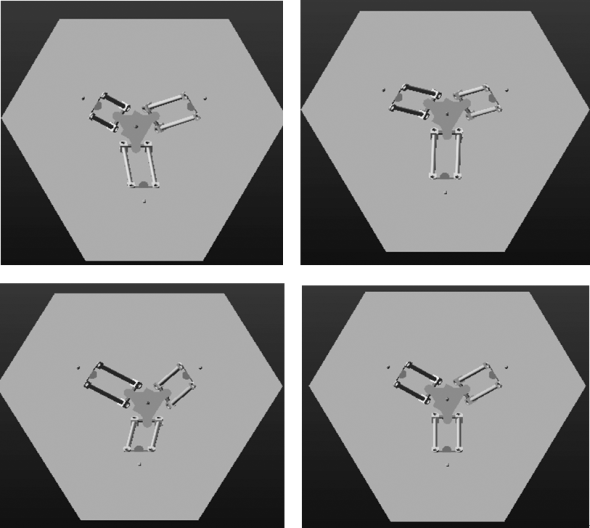

Figure 11.
Inverse solution simulation analysis"
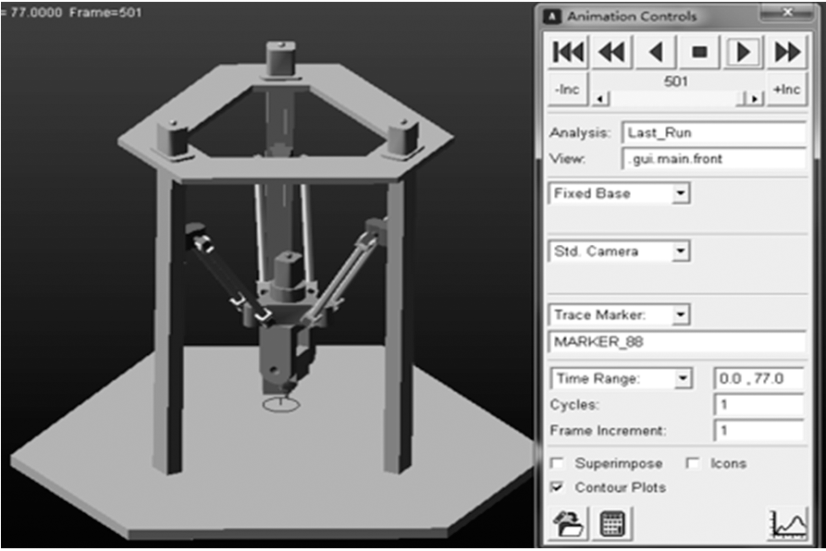

Figure 12.
Terminal output curve I"
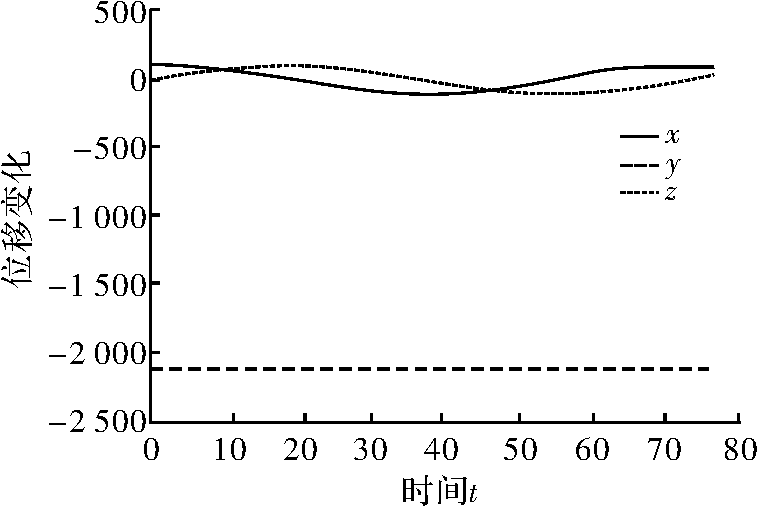
Figure 13.
Terminal output curve II"
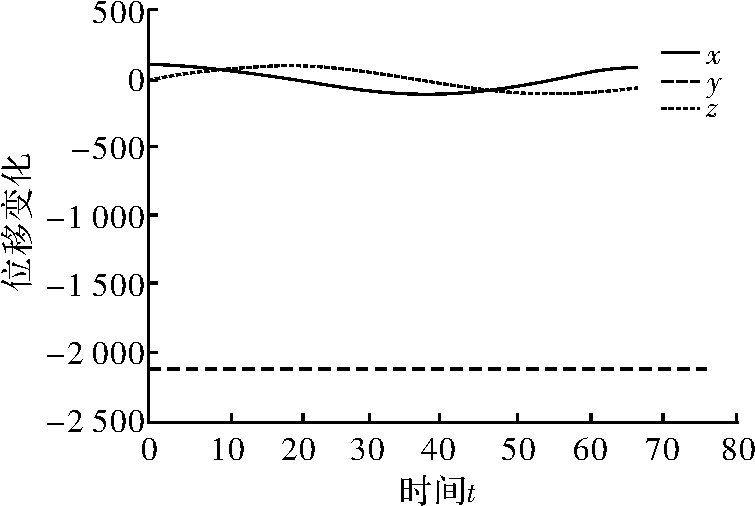
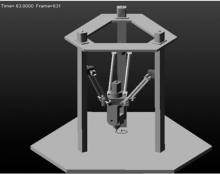
Figure 14.
Direct solution simulation analysis"
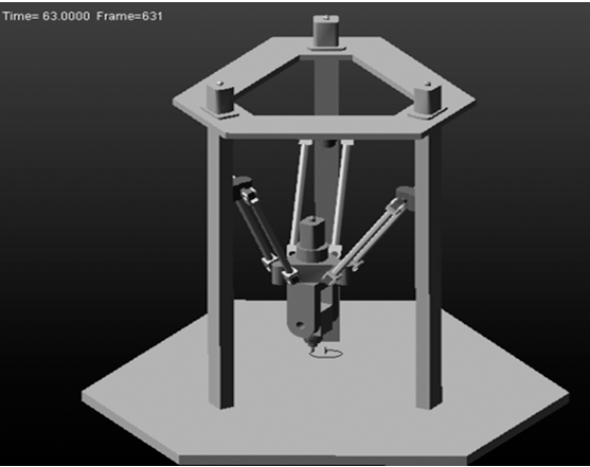
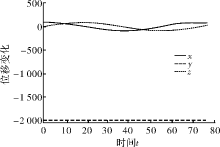
Figure 15.
Output of end displacement curve in ADAMS"
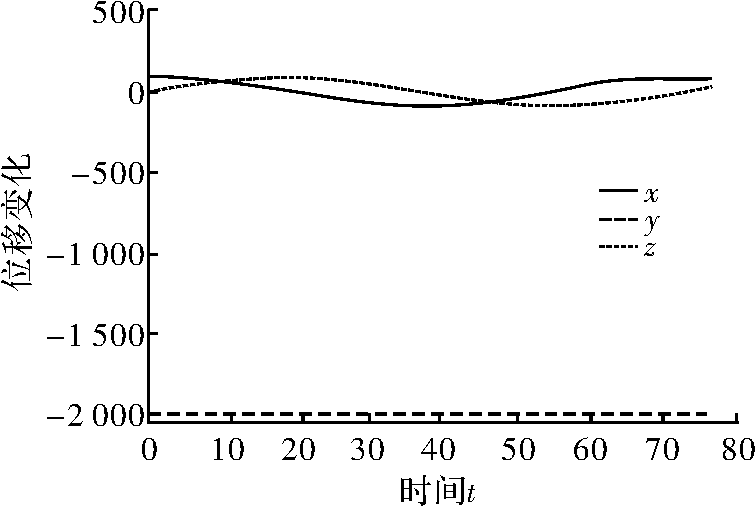
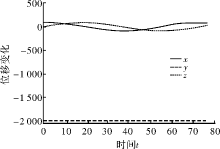
Figure 16.
Terminal displacement output"
| [1] |
Baipai A, Roth B . Workspace and mobility of a close- loop manipulator[J]. The International Journal of Robotics Research, 1986,5(2):131-142.
doi: 10.1177/027836498600500214 |
| [2] | 刘旭东, 黄田 . 3-TPT型并联机器人工作空间解析与综合[J].中国机械工程,2001(12):151-153. |
| Liu Xudong, Huang Tian . Workspace analysis and synt-hesis of 3-TPT parallel robot[J].Chinese Mechanical Engineering, 2001(12):151-153. | |
| [3] | 张克涛, 方跃法 . 一种新型空间三自由度并联机器人的运动学与工作空间分析[J]. 自然科学进展, 2008,18(4):432-440. |
| Zhang Ketao, Fang Yuefa . Kinematics and workspace analysis of a new space 3-DOF parallel robot[J]. Advances in Natural Science, 2008,18(4):432-440. | |
| [4] | 雷俊松 . 一种混联机器人的运动学及轨迹规划研究[D]. 昆明:昆明理工大学, 2017. |
| Lei Junsong . Kinematics analysis and trajectory planning of a serial-parallel robot[D].Kunming:Kunming University of Science and Technology. | |
| [5] |
Liu H, Huang T, Mei J , et al. Kinematic design of a 5-DOF hybrid robot with large workspace limb-stroke ratio[J]. Journal of Mechanical Design, 2007,129(5):530-53.
doi: 10.1115/1.2712220 |
| [6] | 吴梦丽, 黄田, 张大卫 , 等. 一种新型可重构装备Tri-Variant的概念设计[J]. 机械设计, 2004,21(21):28-30. |
| Wu Mengli, Huang Tian, Zhang Dawei , et al. Conceptual design of a new reconfigurable equipment Tri-Variant[J]. Machinery, 2004,21(21):28-30. | |
| [7] | 刘宏伟, 马质璞 . 3-PRS并联机构运动分析及仿真[J].机械设计与制造,2012(1):211-213. |
| Liu Hongwei, Ma Zhipu . Kinematics analysis & simulation for 3-PRS parallel mechanism[J].Machinery Design & Manufacture, 2012(1):211-213. | |
| [8] | 赵铁石, 陈江, 王家春 , 等. 4-UPU并联机器人机构及其运动学[J]. 中国机械工程, 2005,16(22):2034-2037. |
| Zhao Tieshi, Chen Jiang, Wang Jiachun , et al. 4-UPU parallel manipulator mechanism and kinematics[J]. Chinese Mechanical Engineering, 2005,16(22):2034-2037. | |
| [9] | 朱呈祥, 沈景凤 . 基于MATLAB和ADAMS的超速机柔性轴系仿真[J]. 电子科技, 2017,30(4):98-102. |
| Zhu Chengxiang, Shen Jingfeng . Simulation of speed flexible shaft machine based on MATLAB and ADAMS[J]. Electronic Science and Technology, 2017,30(4):98-102. | |
| [10] | 高飞, 丁学明, 李健 . 一种小型智能割草机器人的设计与实现[J]. 电子科技, 2018,31(4):68-72. |
| Gao Feng, Ding Xueming, Li Jian . Design and implementation of a small intelligent mowing robot[J]. Electronic Science and Technology, 2018,31(4):68-72. | |
| [11] | 袁先垚, 刘华, 马明明 , 等. 基于ADAMS的并联机床运动学仿真[J]. 山东理工大学学报, 2008,22(6):34-36. |
| Yuan Xianyao, Liu Hua, Ma Mingming , et al. Kinematics simulation of parallel machine tool based on ADAMS[J]. Journal of Shandong University of Technology, 2008,22(6):34-36. | |
| [12] | 朱春霞, 朱立达, 庞子瑞 , 等. 一种少自由度并联机床在ADAMS中的建模与仿[J]. 工具技术, 2007,41(12):38-42. |
| Zhu Chunxia, Zhu Lida, Pang Zilong , et al. Modeling and simulation of no-full DOF parallel machine tool in ADAMS[J]. Tool Technology, 2007,41(12):38-42. | |
| [13] | 李滨城, 杨丹, 顾金凤 , 等. 基于MATLAB和ADAMS的六自由度并联运动机床运动学仿真[J].设计与研究, 2009(11) : 28-31. |
| Li Bincheng, Yang Dan, Gu Jinfeng . Kinematics simulation of 6-DOF parallel kinematics machine based on MATLAB and ADAMS[J].Design and Research, 2009(11):28-31. | |
| [14] | 黄真, 刘婧芳 . 论机构自由度[M]. 北京: 科学出版社, 2011. |
| Huang Zhen, Liu Jingfang. On the degree of freedom of institutions[M]. Beijing: Science Press, 2011. | |
| [15] | 米士彬, 金振林 . 基于雅克比矩阵求解并联机器人位置正解方法[J]. 燕山大学学报, 2011,35(5):391-395. |
| Mi Shibin, Jin Zhenlin . Forward position solution of parallel robot based on Jacobian matrix[J]. Journal of Yan Shan University, 2011,35(5):391-395. | |
| [16] | 郑建荣 . ADAMS虚拟样机技术入门与提高[M]. 北京: 机械工业出版社, 2003. |
| Zheng Jianrong. Introduction and improvement of ADAMS virtual prototyping technology[M]. Beijing: Machinery Industry Press, 2003. | |
| [17] | 赵武云, 刘艳妍 . ADAMS基础与应用实例教程[M]. 北京: 清华大学出版社, 2011. |
| Zhao Wuyun, Liu Yanyan. ADAMS basic and applicati-on example course[M]. Beijing: Tsinghua University Press, 2011. |
| [1] | LIU Jianlong,HAO Zhenghang. Comparative Study of Wind Power System Simulation Based on Back-to-Back Converters [J]. Electronic Science and Technology, 2022, 35(2): 67-73. |
| [2] | SU Xiaohang,WANG Lihua,CHEN Jiaming. Research on Fatigue Life of Oil Cylinder System Based on Multi-Body Dynamics and Finite Element [J]. Electronic Science and Technology, 2022, 35(1): 40-44. |
| [3] | YUAN Xianpu,MIAO Xiaodan,YANG Jian,YUAN Tianchen,YUAN Ding. Aerodynamic Noise Analysis for High-Speed Train’s Pantograph and Study on Noise Reduction of the Cavity of Pantograph [J]. Electronic Science and Technology, 2022, 35(1): 45-52. |
| [4] | CHEN Jiaming,WANG Lihua,SU Xiaohang. Research on Mechanical Characteristics of Railway Bridge Ballast Bed Based on ADAMS [J]. Electronic Science and Technology, 2022, 35(1): 53-59. |
| [5] | WANG Yumei,ZHANG Zihan,WANG Hao. Large-Disturbance Stability Analysis of DC Microgrid Based on Mixed Potential Function [J]. Electronic Science and Technology, 2022, 35(1): 66-72. |
| [6] | NIU Shuaichen,WANG Fuzhong,HAN Yaofei,HE Guofeng,NIU Yeke. Control Strategy of Modular Multilevel Converter Under Unbalanced Grid Voltage [J]. Electronic Science and Technology, 2022, 35(1): 80-86. |
| [7] | LI Gang. A Synthesis Method for Dual-Band Filters with Frequency Variant Couplings [J]. Electronic Science and Technology, 2022, 35(1): 1-5. |
| [8] | HAN Shifan,FU Dongxiang. Research on Optical Lens Reconstruction Algorithm Based on NURBS [J]. Electronic Science and Technology, 2021, 34(9): 24-29. |
| [9] | WANG Yang,WANG Yagang. Identification Method Based on Step Response and Genetic Algorithm to Optimize Higher-Order Plus Time-Delay Model [J]. Electronic Science and Technology, 2021, 34(9): 41-46. |
| [10] | LI Yudong,LIAN Haishan,HU Xiaodan. AC/AC Frequency Conversion Power Supply Based on Three-Phase Input [J]. Electronic Science and Technology, 2021, 34(9): 47-53. |
| [11] | YAN Zhenbin,ZHENG Bochao,ZHOU Zhiyong. Research on Grid Connection of Photovoltaic Power Generation Systems Based on a New Robust Droop Control Method [J]. Electronic Science and Technology, 2021, 34(8): 79-86. |
| [12] | TANG Shengnan,LÜ Yibin,WANG Yingzi,FANG Jinli,WU Dean. Hybrid Iteration Method for Number Conformal Mapping of Multi-Connected Domain [J]. Electronic Science and Technology, 2021, 34(7): 13-18. |
| [13] | ZHANG Fei,LIN Mao,MAO Hongkai,SU Fangwen,SUI Jinchi. An AlGaN/GaN High-Electron Mobility Transistor with N-Buried Layer [J]. Electronic Science and Technology, 2021, 34(5): 61-65. |
| [14] | HE Yue,ZHANG Jianhua,CHEN Yan,HAN Chunyong,SHI Yunlei,SHAO E. Study on Radiation Response Characteristics of Internal Cables of Frequency Equipment [J]. Electronic Science and Technology, 2021, 34(3): 18-21. |
| [15] | WU Fengyan,LIU Gequn,TAO Feng,GU Dongqing,LIU Xiaokun,ZHANG Wei. Influences of Historical Rate of Interest on the Evolutionary Joint Production Game in Complex Networks [J]. Electronic Science and Technology, 2021, 34(3): 22-27. |
|
