Electronic Science and Technology ›› 2022, Vol. 35 ›› Issue (3): 32-37.doi: 10.16180/j.cnki.issn1007-7820.2022.03.005
Previous Articles Next Articles
Xinge SHEN,Hai JIN,Liang GUO
Received:2020-10-28
Online:2022-03-15
Published:2022-04-02
Supported by:CLC Number:
Xinge SHEN,Hai JIN,Liang GUO. Research on Adaptive Backstepping Control of Quadrotor UAV[J].Electronic Science and Technology, 2022, 35(3): 32-37.
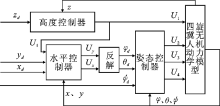
Figure 1.
Block diagram of the control structure of a quadrotor UAV"
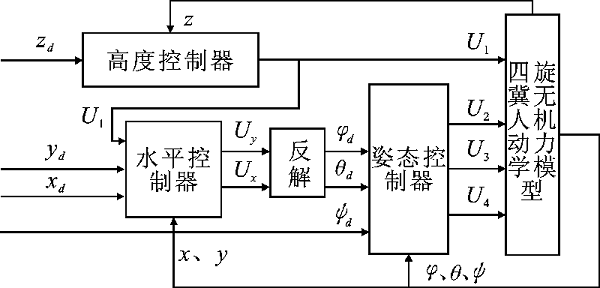
Table 1
UAV mathematical simulation model parameters"
| 参数名 | 符号 | 数值 | 单位 |
|---|---|---|---|
| 无人机总质量 | m | 1.5 | kg |
| 无人机轴距 | L | 0.25 | m |
| 杭州重力加速度 | g | 9.793 6 | m·s-2 |
| 绕X轴的转动惯量 | Ix | 5.813×10-3 | kg·m2 |
| 绕Y轴的转动惯量 | Iy | 5.813×10-3 | kg·m2 |
| 绕Z轴的转动惯量 | Iz | 1.108×10-2 | kg·m2 |
| 机身阻力系数 | K | 2.336×10-2 | N·(m·s)-2 |
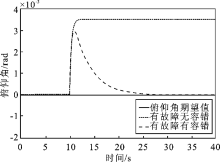
Figure 2.
Pitch angle tracking curve under interference"
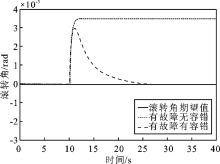
Figure 3.
Roll angle tracking curve under interference"

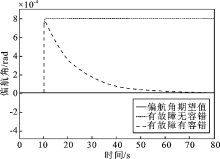
Figure 4.
Yaw angle tracking curve under interference"
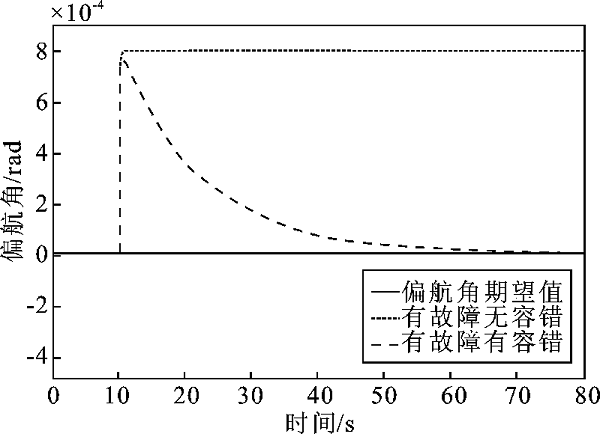
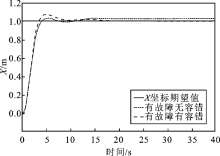
Figure 5.
X-axis tracking curve under interference"
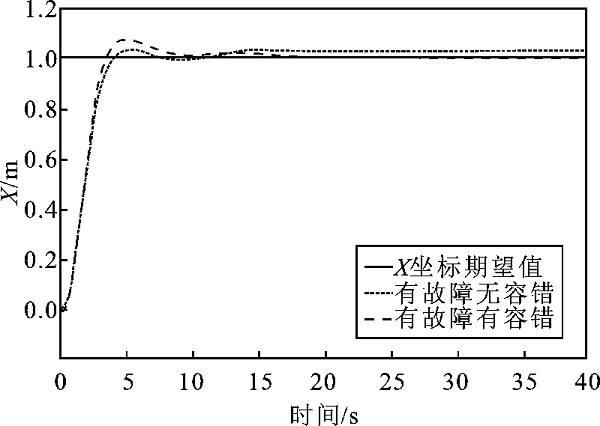
Figure 6.
Y-axis tracking curve under interference"
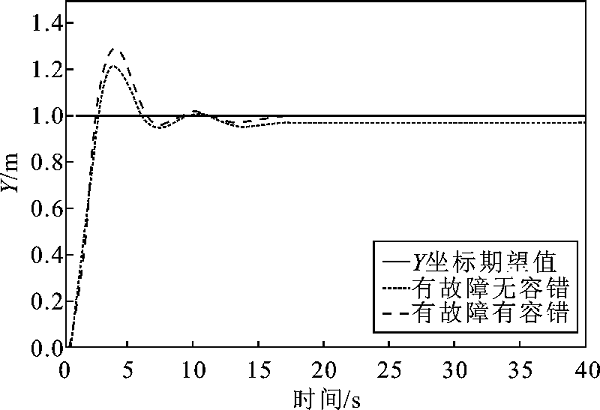
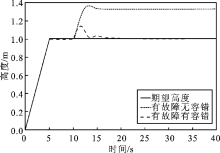
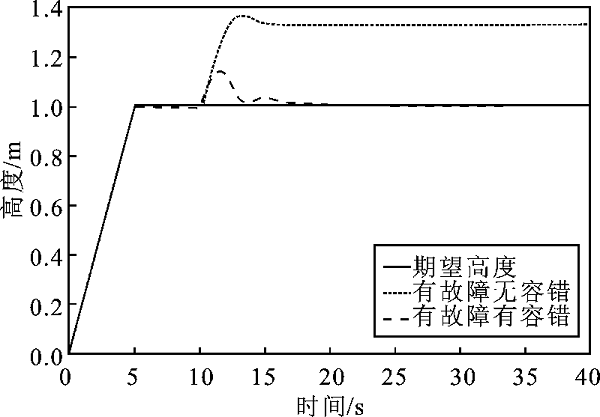
Figure 7.
Height tracking curve under interference"
| [1] | 周由. 四旋翼无人机飞行控制系统的研究[D]. 武汉:华中科技大学, 2017. |
| Zhou You, Study on flight control system of four-rotor unmanned aerial vehicle[D]. Wuhan:Huazhong University of Science and Technology, 2017. | |
| [2] | 胡乔峰. 基于GA-ADRC的四旋翼飞行控制系统设计[D]. 厦门:厦门大学, 2018. |
| Hu Qiaofeng. Control system design of the quad-rotor based on GA-ADRC[D]. Xiamen:Xiamen University, 2018. | |
| [3] | 周子栋, 陈至坤, 赵志佳. 四旋翼无人机飞控算法综述[J].网络安全技术与应用, 2019(9):33-35. |
| Zhou Zidong, Chen Zhikun, Zhao Zhijia. Overview of quad-rotor UAV flight control algorithm[J]. Network Security Technology and Application, 2019(9):33-35. | |
| [4] | 王成, 杨杰, 姚辉, 等. 四旋翼无人机飞行控制算法综述[J]. 电光与控制, 2018,25(12):57-62. |
| Wang Cheng, Yang Jie, Yao Hui, et al. An overview of flight control algorithms for quadrotors[J]. Electro Optics & Control, 2018,25(12):53-58. | |
| [5] | 崔道旺. 四旋翼飞行器的鲁棒自适应控制研究[D]. 北京:北京交通大学, 2016. |
| Cui Daowang. The robust adaptive control of quad-rotor aircraft[D]. Beijing:Beijing Jiaotong University, 2016. | |
| [6] | 郑健. 基于无模型自适应控制方法的四旋翼飞行器姿态调整[D]. 北京:北京交通大学, 2015. |
| Zheng Jian. Quad-rotor aircraft attitude adjustment based on model-free adaptive control[D]. Beijing:Beijing Jiaotong University, 2015. | |
| [7] | 徐大远, 王英健, 陈冠军, 等. 四轴飞行器的动力学建模和位置控制研究[J]. 电子科技, 2015,28(1):69-72. |
| Xu Dayuan, Wang Yingjian, Chen Guanjun, et al. Research on dynamic modeling and position control of the quadcopter[J]. Electronic Science and Technology, 2015,28(1):69-72. | |
| [8] | 张硕, 张学典, 秦敏, 等. 基于Backstepping模糊自适应的四旋翼飞行器控制[J]. 电子科技, 2017,30(2):54-57. |
| Zhang Shuo, Zhang Xuedian, Qin Min, et al. Adaptive fuzzy backstepping control of quadrotor[J]. Electronic Science and Technology, 2017,30(2):54-57. | |
| [9] | 邓博文, 窦强, 龚国辉, 等. 四旋翼飞行器悬停算法设计与实现[J]. 电子科技, 2015,28(11):21-24. |
| Deng Bowen, Dou Qiang, Gong Guohui, et al. Design and realization of four-rotor aricraft hovering algorithm[J]. Electronic Science and Technology, 2015,28(11):21-24. | |
| [10] | 岳秀, 张伟. 基于智能算法的无人机航迹规划[J]. 电子科技, 2019,32(2):9-13. |
| Yue Xiu, Zhang Wei. UAV path planning based on intelligent algorithm[J]. Electronic Science and Technology, 2019,32(2):9-13. | |
| [11] | 梅武军, 伍家成, 杨扬戬, 等. 一种小型无人机自主飞控系统设计与实现[J]. 电子科技, 2017,30(7):106-109. |
| Mei Wujun, Wu Jiacheng, Yang Yangjian, et al. Multi rotor autonomous flight control system based on the ROS system[J]. Electronic Science and Technology, 2017,30(7):106-109. | |
| [12] | 刘闯. 航天器姿态鲁棒控制方法研究[D]. 哈尔滨:哈尔滨工业大学, 2019. |
| Liu Chuang. Research on robust control methods for spacecraft attitude[D]. Harbin:Harbin Institute of Technology, 2019. | |
| [13] | Badr S, Mehrez O, Kabeel A E. A design modification for a quadrotor UAV: modeling,control and implementation[J]. Advanced Robotics, 2019,33(1):13-32. |
| [14] | Wan W Q, Liu Y. Design of attitude control system for four rotor UAV[J]. IOP Conference Series:Materials Science and Engineering, 2018,452(4):1-6. |
| [15] | 芦飞. 基于反步法的小型四旋翼无人飞行器飞行控制系统研究与设计[D]. 天津:天津大学, 2017. |
| Lu Fei. Study and design of flight control systems for small-scale quadrotor unmanned aerial vehicle based on backstepping[D]. Tianjin:Tianjin University, 2017. | |
| [16] | 李继广, 陈欣, 李亚娟, 等. 飞翼无人机非线性控制设计方法[J]. 哈尔滨工业大学学报, 2017,49(9):151-158. |
| Li Jiguang, Chen Xin, Li Yajuan, et al. Flying wing UAV control design study of nonlinear method and flight validation[J]. Journal of Harbin Institute of Technology, 2017,46(9):151-158. | |
| [17] | 李珺, 王娜, 花玉, 等. 基于干扰观测器的四旋翼飞行器反步控制研究[J]. 计算机仿真, 2020,37(4):28-33. |
| Li Jun, Wang Na, Hua Yu, et al. Study on disturbance observer-based backstepping control for quadrotor[J]. Computer Simulation, 2020,37(4):28-33. | |
| [18] | 徐会丽. 多旋翼无人机飞行控制算法研究[D]. 重庆:中国科学院大学(中国科学院重庆绿色智能技术研究院), 2017. |
| Xu Huili. Research on flight control algorithm of multi-rotor UAV[D]. Chongqing:University of Chinese Academy of Sciences(Chongqing Institute of Green and Intelligence Technology of Chinese Academy of Sciences), 2017. | |
| [19] | 薛亮, 王新华, 贾森, 等. 基于模糊PID的多旋翼无人机姿态控制系统设计[J]. 电子设计工程, 2016,24(16):61-62. |
| Xue Liang, Wang Xinhua, Jia Sen, et al. Design of attitude control system for unmanned multi-rotor craft[J]. Electronic Design Engineering, 2016,24(16):61-62. |
| [1] | Xiaojing YANG,Hongxiu YANG. Simulation of Dynamic Process of Micro-Cutting Single Crystal Germanium Based on SPH Method [J]. Electronic Science and Technology, 2022, 35(4): 67-71. |
| [2] | Xuanfeng SHANGGUAN,Tingyu YANG,Jinsong WEI,Yongjian LIU. Design Analysis and Modeling Simulation of Brushless DC Motor [J]. Electronic Science and Technology, 2022, 35(3): 71-78. |
| [3] | LIU Jianlong,HAO Zhenghang. Comparative Study of Wind Power System Simulation Based on Back-to-Back Converters [J]. Electronic Science and Technology, 2022, 35(2): 67-73. |
| [4] | YUAN Xianpu,MIAO Xiaodan,YANG Jian,YUAN Tianchen,YUAN Ding. Aerodynamic Noise Analysis for High-Speed Train’s Pantograph and Study on Noise Reduction of the Cavity of Pantograph [J]. Electronic Science and Technology, 2022, 35(1): 45-52. |
| [5] | CHEN Jiaming,WANG Lihua,SU Xiaohang. Research on Mechanical Characteristics of Railway Bridge Ballast Bed Based on ADAMS [J]. Electronic Science and Technology, 2022, 35(1): 53-59. |
| [6] | WANG Yumei,ZHANG Zihan,WANG Hao. Large-Disturbance Stability Analysis of DC Microgrid Based on Mixed Potential Function [J]. Electronic Science and Technology, 2022, 35(1): 66-72. |
| [7] | LI Gang. A Synthesis Method for Dual-Band Filters with Frequency Variant Couplings [J]. Electronic Science and Technology, 2022, 35(1): 1-5. |
| [8] | NIU Shuaichen,WANG Fuzhong,HAN Yaofei,HE Guofeng,NIU Yeke. Control Strategy of Modular Multilevel Converter Under Unbalanced Grid Voltage [J]. Electronic Science and Technology, 2022, 35(1): 80-86. |
| [9] | HAN Shifan,FU Dongxiang. Research on Optical Lens Reconstruction Algorithm Based on NURBS [J]. Electronic Science and Technology, 2021, 34(9): 24-29. |
| [10] | WANG Yang,WANG Yagang. Identification Method Based on Step Response and Genetic Algorithm to Optimize Higher-Order Plus Time-Delay Model [J]. Electronic Science and Technology, 2021, 34(9): 41-46. |
| [11] | LI Yudong,LIAN Haishan,HU Xiaodan. AC/AC Frequency Conversion Power Supply Based on Three-Phase Input [J]. Electronic Science and Technology, 2021, 34(9): 47-53. |
| [12] | YAN Zhenbin,ZHENG Bochao,ZHOU Zhiyong. Research on Grid Connection of Photovoltaic Power Generation Systems Based on a New Robust Droop Control Method [J]. Electronic Science and Technology, 2021, 34(8): 79-86. |
| [13] | TANG Shengnan,LÜ Yibin,WANG Yingzi,FANG Jinli,WU Dean. Hybrid Iteration Method for Number Conformal Mapping of Multi-Connected Domain [J]. Electronic Science and Technology, 2021, 34(7): 13-18. |
| [14] | ZHANG Fei,LIN Mao,MAO Hongkai,SU Fangwen,SUI Jinchi. An AlGaN/GaN High-Electron Mobility Transistor with N-Buried Layer [J]. Electronic Science and Technology, 2021, 34(5): 61-65. |
| [15] | HE Yue,ZHANG Jianhua,CHEN Yan,HAN Chunyong,SHI Yunlei,SHAO E. Study on Radiation Response Characteristics of Internal Cables of Frequency Equipment [J]. Electronic Science and Technology, 2021, 34(3): 18-21. |
|
