Electronic Science and Technology ›› 2023, Vol. 36 ›› Issue (8): 56-64.doi: 10.16180/j.cnki.issn1007-7820.2023.08.009
Previous Articles Next Articles
DING Xiangxin,ZHANG Wei,WANG Yagang
Received:2022-03-24
Online:2023-08-15
Published:2023-08-14
Supported by:CLC Number:
DING Xiangxin,ZHANG Wei,WANG Yagang. PID Controller Tuning of Time Delay Integral System Based on Multi Dominant Pole Method[J].Electronic Science and Technology, 2023, 36(8): 56-64.
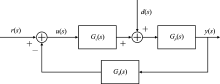
Figure 1.
Structure of the differential forward PID control system"
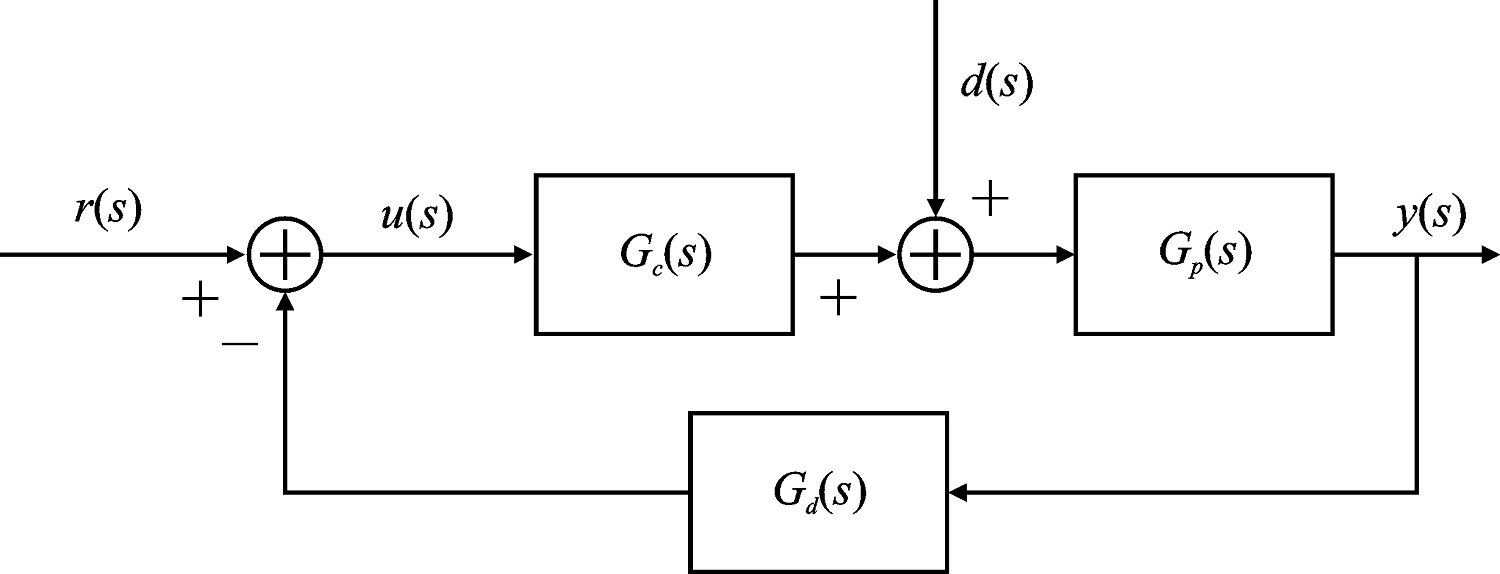
Figure 2.
Variation of Ms with λ for PIPTD"
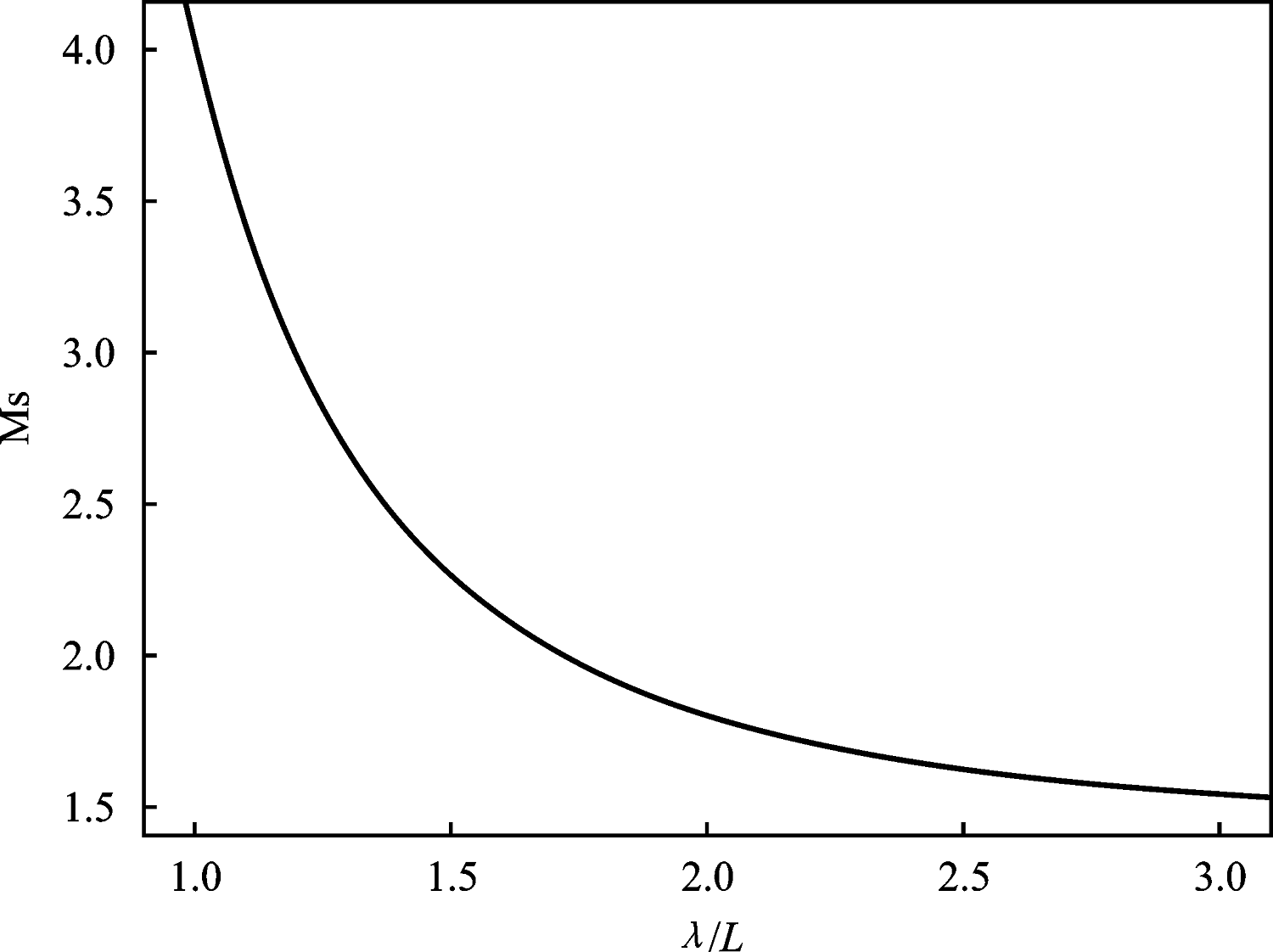
Figure 3.
Variation of Ms with λ for DIPTD"
Table 1.
PID tuning rules for PIPTD"
| 被控对象 | PID控制器 | PID参数及滤波器参数 |
|---|---|---|
| Gc=kc(1+1/τis) Gd=1+τds 1.5≤Ms≤3.0 | ||
| kpkcL2=-0.495 5+1.497 |
Table 2.
PID tuning rules for DIPTD"
| 被控对象 | PID控制器 | PID参数及滤波器参数 |
|---|---|---|
2.0≤Ms≤4.0 | ||
| kpkcL2=0.662 3 | ||
Table 3.
PID tuning rules for FOPTDI"
| 被控对象 | PID控制器 | PID参数及滤波器参数 |
|---|---|---|
| Gc=kc(1+1/τis) Gd=1+τds F(s)= | ||
| kpkcτ=1.007 | ||
0.30≤ | ||
0.30≤ | ||
Table 4.
PID settings and filter parameters (PIPTD)"
| 被控对象 | 方法 | τi | τd | kc | Ms |
|---|---|---|---|---|---|
| Gp= | 本文 | 16.876 5 | 2.124 4 | 3.296 0 | 2.0 |
| CH | 18.940 0 | 1.890 0 | 3.727 0 | 2.0 | |
| AA | - | 2.378 0 | 2.993 3 | 2.0 | |
| 20.575 0 | 1.770 0 | 3.320 9 | |||
| VV | 18.660 0 | 1.890 0 | 3.727 0 | 1.9 | |
| ROP | 20.200 0 | 1.800 0 | 3.408 0 | 2.0 |
Figure 4.
Servo problem and regulatory problem of step responses (PIPTD)"

Table 5.
Performance comparison in terms of IAE and TV for step response (PIPTD)"
| 被控对象 | 方法 | 追踪 | 扰动抑制 | ||||
|---|---|---|---|---|---|---|---|
| IAE | TV | OS | IAE | TV | OS | ||
| GP= | 本文 | 10.13 | 5.007 | 0.000 | 5.68 | 2.25 | 0.296 |
| CH | 11.40 | 3.950 | 0.001 | 5.08 | 2.18 | 0.304 | |
| AA | 7.154 | 39.18 | 0.075 | 6.19 | 2.77 | 0.323 | |
| VV | 11.54 | 3.864 | 0.028 | 5.94 | 1.95 | 0.343 | |
| ROP | 12.15 | 9.106 | 0.001 | 1.23 | 1.96 | 0.316 | |
Figure 5.
Square wave responses (PIPTD)"
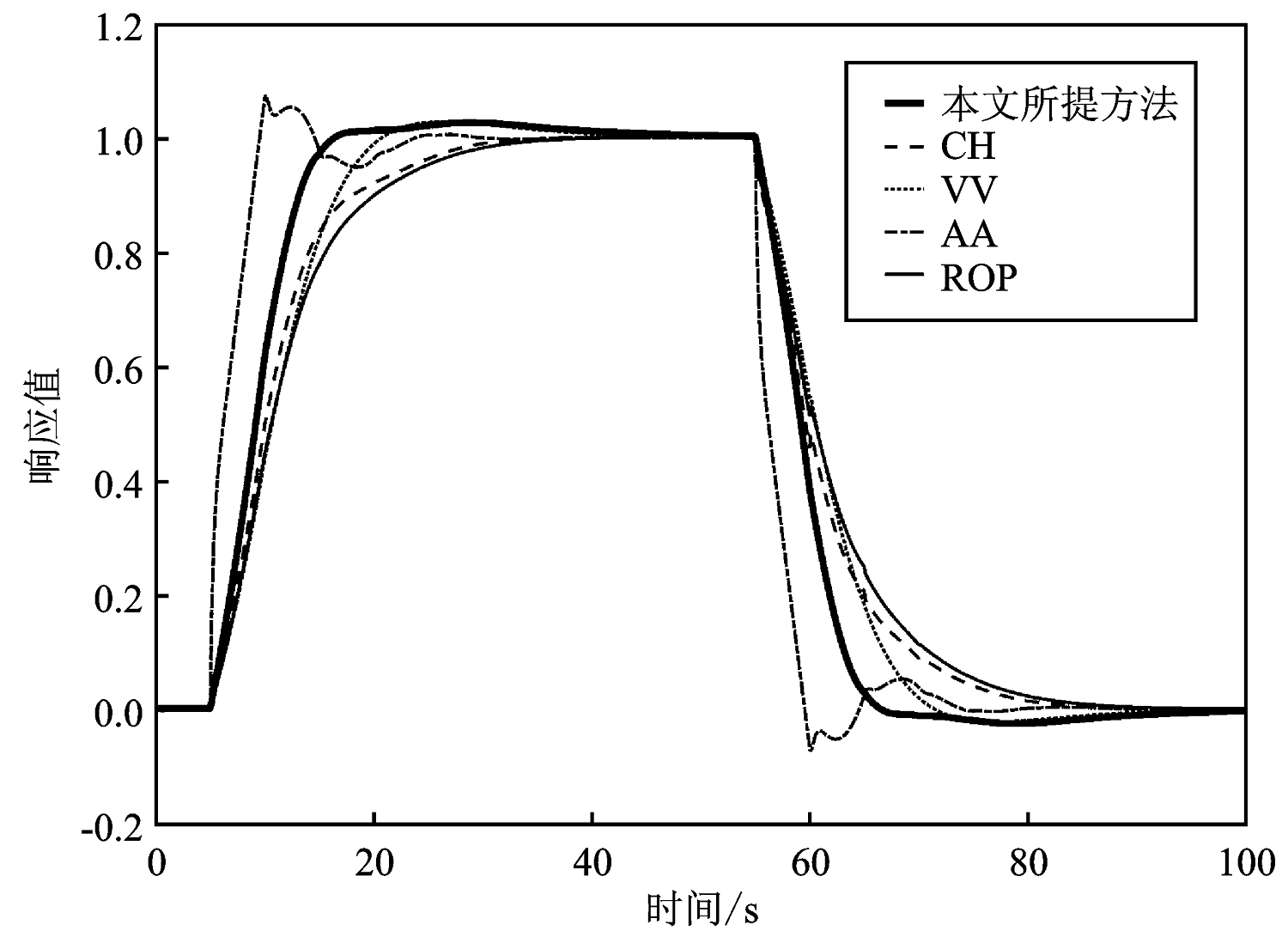
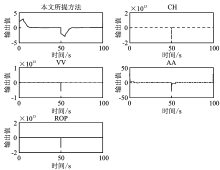
Figure 6.
Controller outputs (PIPTD)"
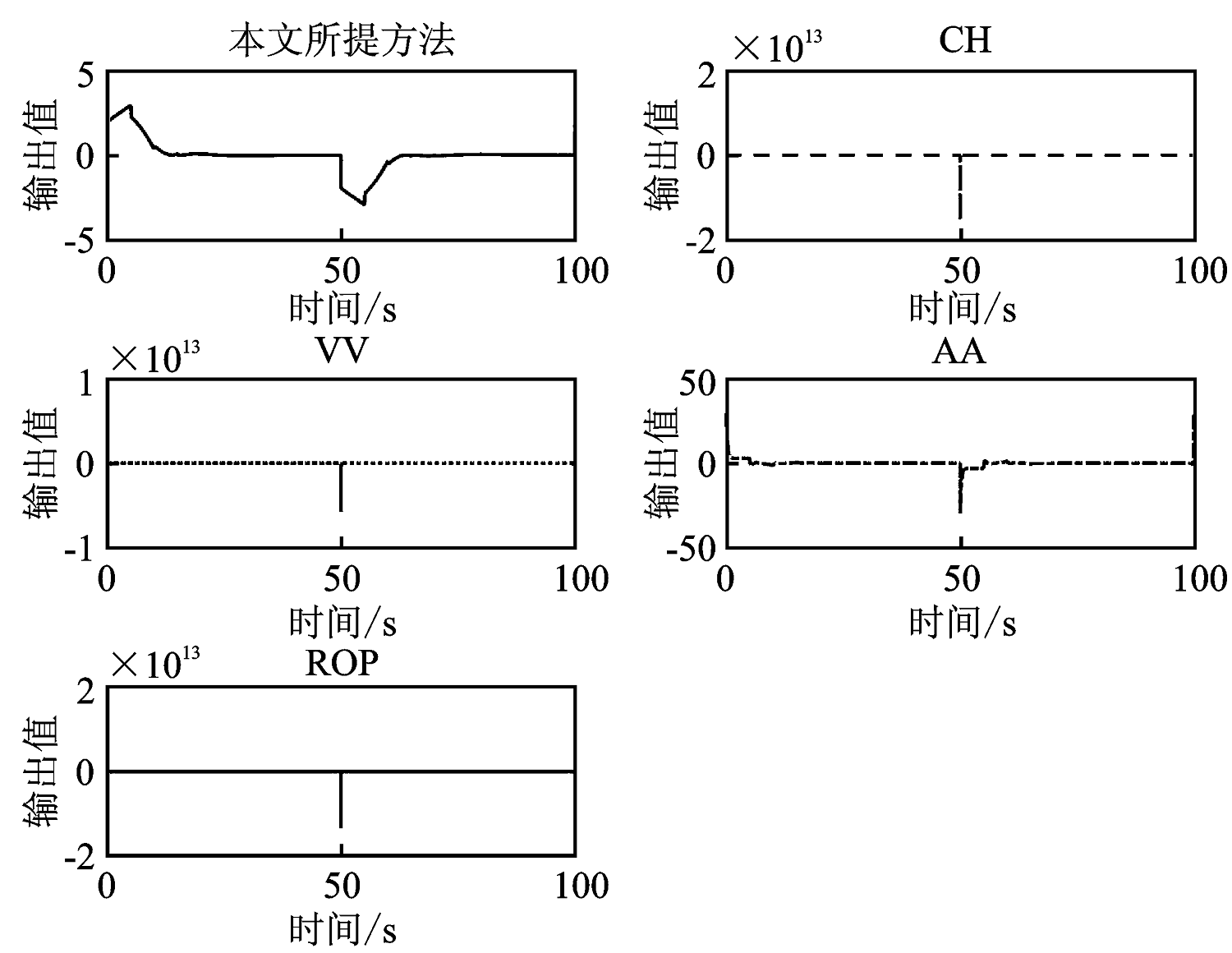
Table 6.
Performance comparison in terms of IAE and TV for square wave response (PIPTD)"
| 被控对象 | 方法 | IAE | TV |
|---|---|---|---|
| Gp= | 本文 | 20.265 0 | 9.912 200 |
| CH | 22.788 5 | 3.098×1013 | |
| AA | 7.154 40 | 136.205 4 | |
| VV | 11.545 9 | 1.555×1013 | |
| ROP | 24.290 2 | 2.697 9×1013 |
Table 7.
PID settings and filter parameters (DIPTD)"
| 被控对象 | 方法 | τi | τd | kc | α | β | Ms |
|---|---|---|---|---|---|---|---|
| Gp= | 本文 | 6.180 | 0.52 | 0.09 | 6.18 | 0.30 | 2.0 |
| CH | 9.726 | 3.82 | 0.14 | 1.08 | 1.04 | 2.0 | |
| JL | 21.280 | 7.25 | 0.05 | - | - | 2.0 | |
| - | 10.70 | 0.03 | |||||
| AA | 22.380 | 7.84 | 0.04 | - | - | 2.0 |
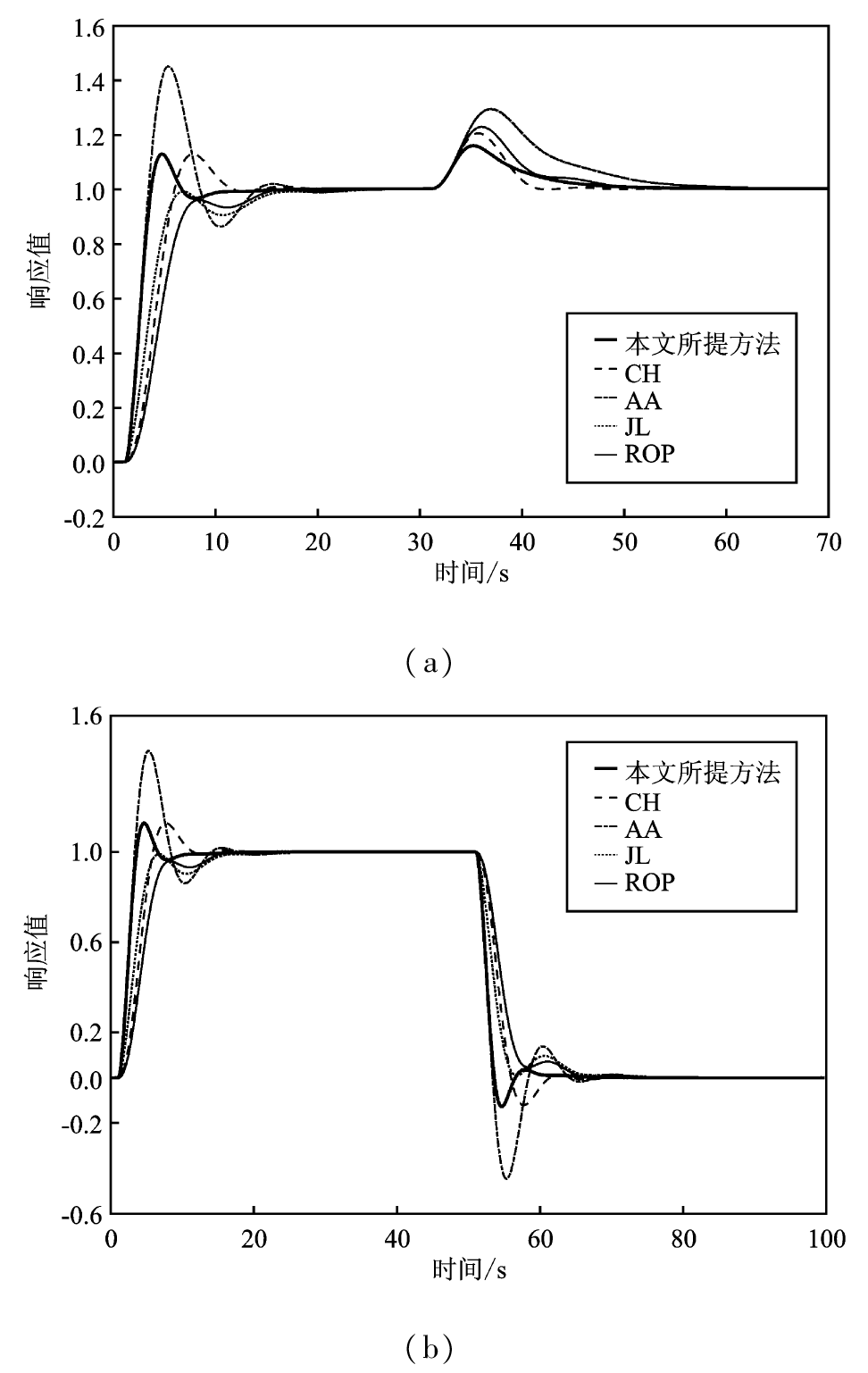
Figure 7.
Servo problem and regulatory problem of step responses (DIPTD)"

Table 8.
Performance comparison in terms of IAE and TV for step response (DIPTD)"
| 被控对象 | 方法 | 追踪 | 扰动抑制 | ||||
|---|---|---|---|---|---|---|---|
| IAE | TV | OS | IAE | TV | OS | ||
| Gp= | 本文 | 3.708 | 1.111 | 0.00 | 63.33 | 2.2 | 5.259 |
| CH | 5.989 | 0.149 | 0.01 | 70.61 | 2.3 | 6.127 | |
| AA | 5.466 | 3.284 | 0.22 | 541.10 | 4.0 | 20.660 | |
| JL | 7.768 | 0.212 | 0.00 | 461.90 | 2.1 | 18.650 | |
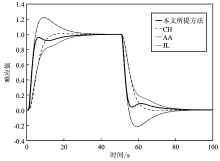
Figure 8.
Square wave responses (DIPTD)"
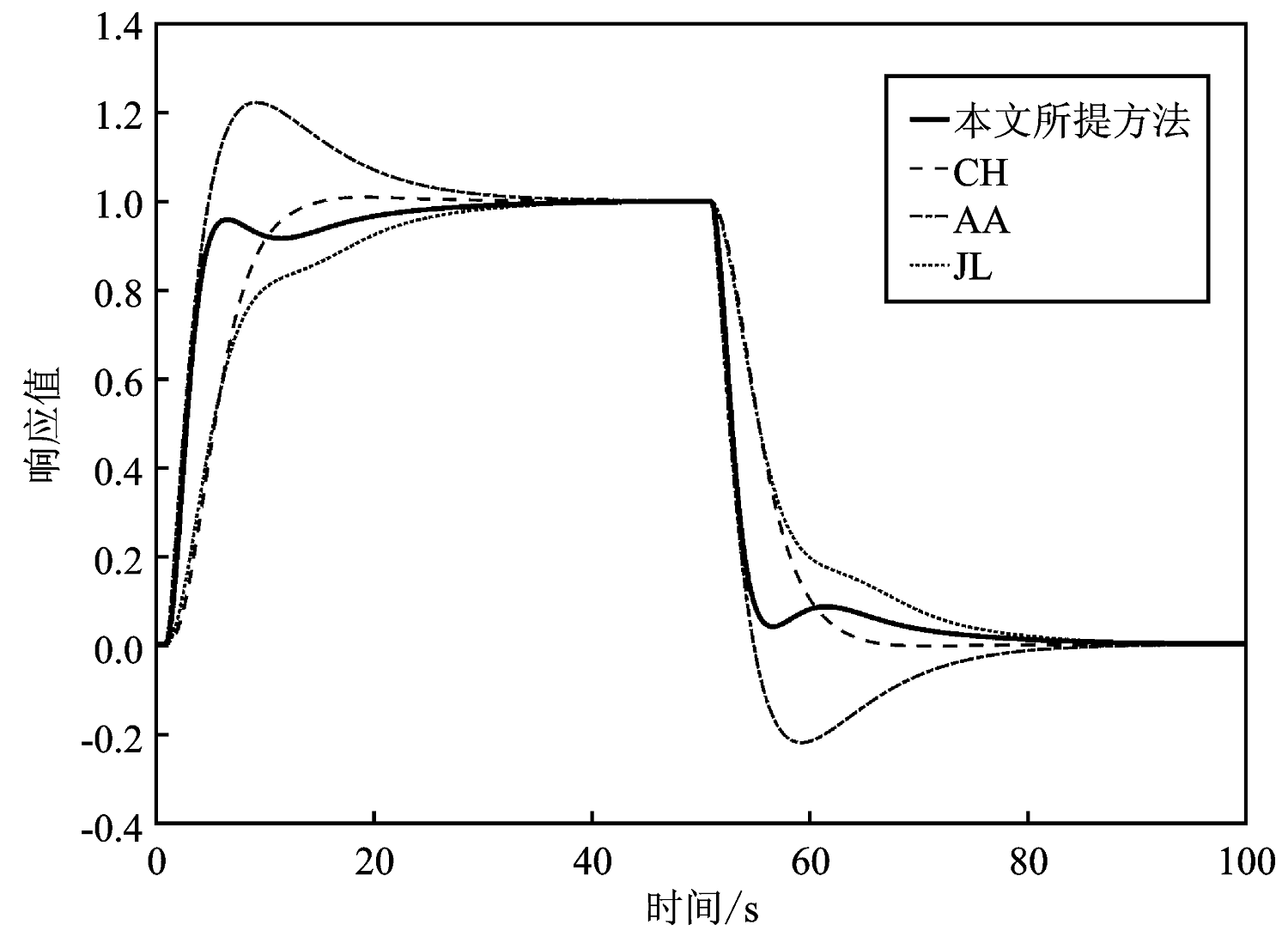
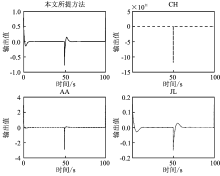
Figure 9.
Controller outputs (DIPTD)"
Table 9.
Performance comparison in terms of IAE and TV for square wave response (DIPTD)"
| 被控对象 | 方法 | IAE | TV |
|---|---|---|---|
| Gp= | 本文 | 7.388 10 | 3.776 6 |
| CH | 11.901 0 | 2.398 0×1013 | |
| AA | 10.924 5 | 12.166 5 | |
| JL | 15.440 4 | 0.727 1 |
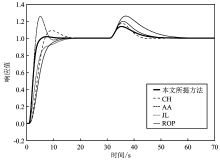
Figure 10.
Servo problem and regulatory problem of step responses (FOPTDI)"
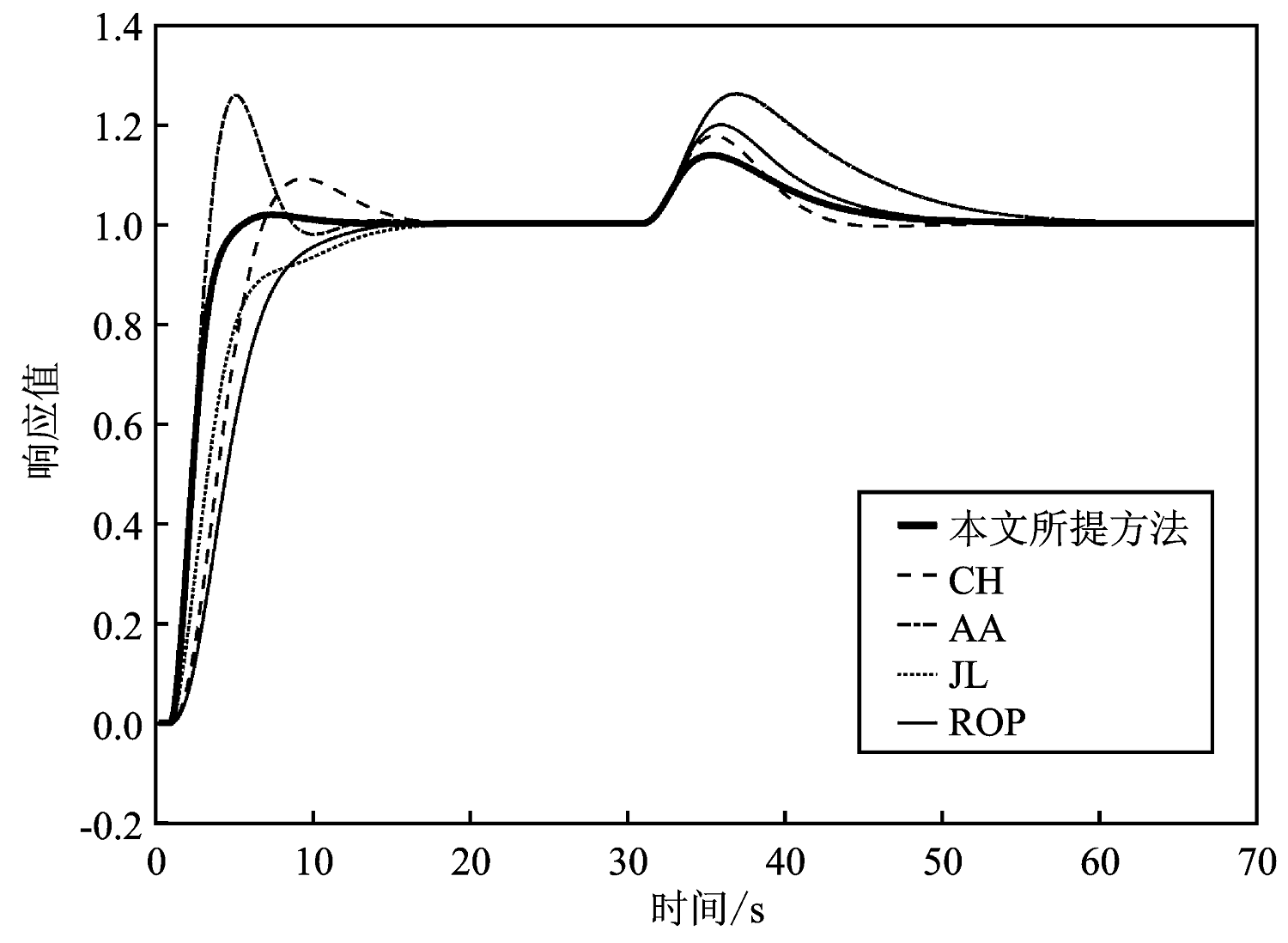
Table 10.
PID settings and filter parameters (FOPTDI)"
| 被控对象 | 方法 | τi | τd | kc | α | β | Ms |
|---|---|---|---|---|---|---|---|
| Gp= | 本文 | 3.879 | 0.50 | 3.41 | 3.87 | 0.18 | 2.0 |
| CH | 5.904 | 1.95 | 5.74 | 0.63 | 0.49 | 2.0 | |
| AA | 10.420 | 2.47 | 3.67 | - | - | 2.0 | |
| JL | 10.390 | 2.47 | 3.68 | - | - | 1.9 | |
| ROP | 8.263 | 2.16 | 5.15 | - | - | 2.0 |
Table 11.
Performance comparison in terms of IAE and TV for step response (FOPTDI)"
| 被控对象 | 方法 | 追踪 | 扰动抑制 | ||||
|---|---|---|---|---|---|---|---|
| IAE | TV | OS | IAE | TV | OS | ||
| Gp= | 本文 | 2.080 | 53.200 | 0.017 | 1.13 | 2.99 | 0.137 |
| CH | 4.506 | 9.350 | 0.089 | 1.09 | 2.31 | 0.174 | |
| AA | 3.130 | 42.130 | 0.256 | 2.84 | 1.83 | 0.259 | |
| JL | 4.133 | 19.420 | 0.000 | 2.82 | 1.84 | 0.259 | |
| ROP | 2.745 | 5.175 | 0.002 | 1.48 | 2.10 | 0.196 | |
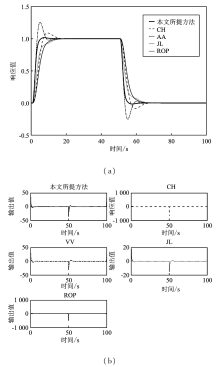
Figure 11.
Square wave responses and the controller outputs (FOPTDI) (a)Square wave responses (b)Controller outputs"
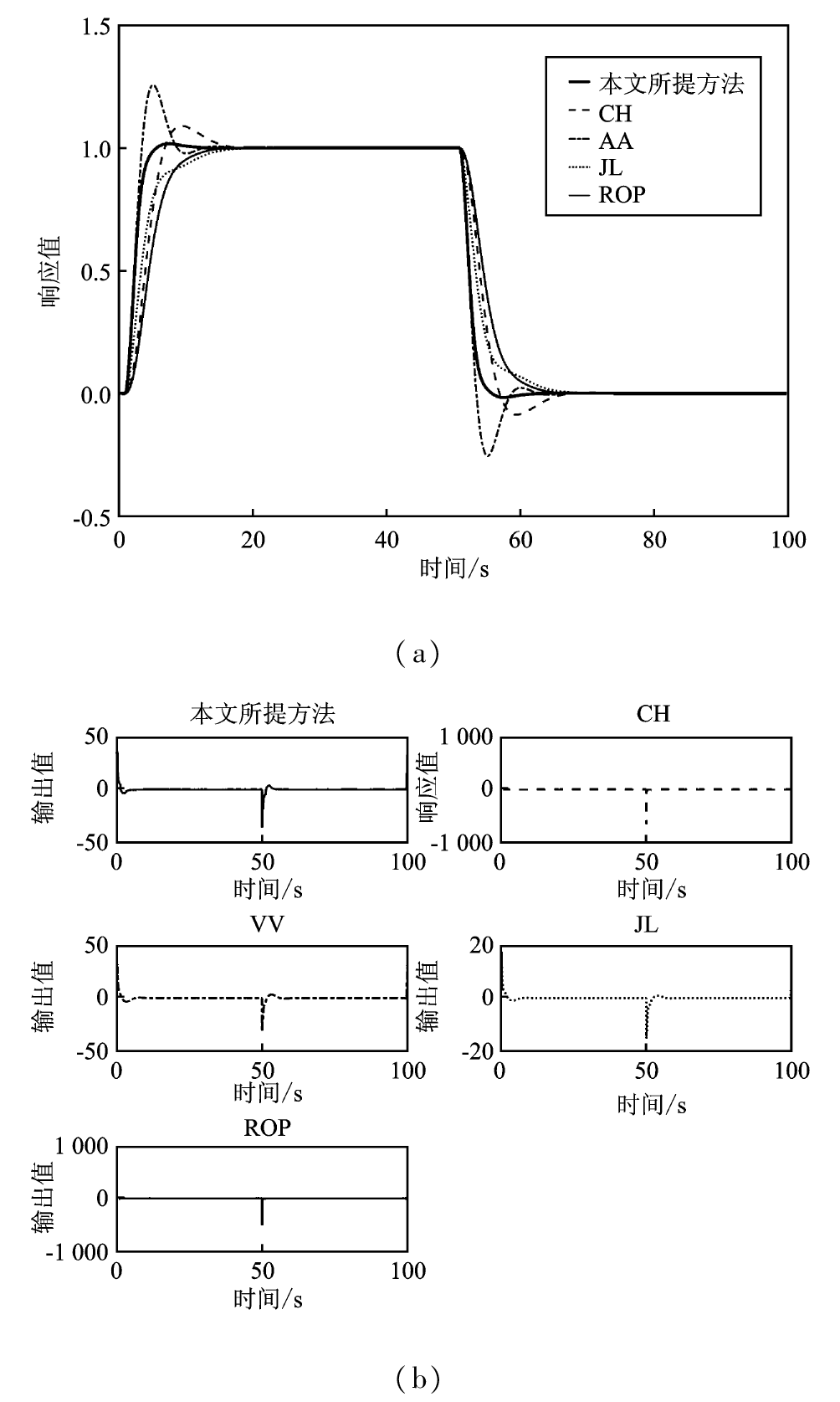
Table 12.
Performance comparison in terms of IAE and TV for square wave responses"
| 被控对象 | 方法 | IAE | TV |
|---|---|---|---|
| Gp= | 本文 | 135.403 8 | 4.715 7 |
| CH | 1.331 5×103 | 8.993 7 | |
| AA | 144.413 3 | 6.260 4 | |
| JL | 66.002 5 | 8.266 6 | |
| ROP | 1.026 8×103 | 9.982 5 |

Figure 12.
Step responses and square wave responses of case (a) Servo problem and regulatory problem of step responses (Adding 20% mismatch) (b) Square wave responses (Adding 20% mismatch)"
| [1] |
Santosh Kumar D B, Padma Sree R. Tuning of IMC based PID controllers for integrating systems with time delay[J]. ISA Transactions, 2016, 63(4):242-255.
doi: 10.1016/j.isatra.2016.03.020 |
| [2] | Zhang W D. Quantitative process control theory[M]. Boca Raton: CRC Press Inc, 2011:105-107. |
| [3] |
Ali A, Majhi S. PID controller tuning for integrating processes[J]. ISA Transactions, 2010, 49(1):70-78.
doi: 10.1016/j.isatra.2009.09.001 pmid: 19782358 |
| [4] |
Jin Q B, Liu Q. Analytical IMC-PID design in terms of performance/robustness tradeoff for integrating processes: From 2-Dof to 1-Dof[J]. Journal of Process Control, 2014, 24(3):22-32.
doi: 10.1016/j.jprocont.2013.12.011 |
| [5] | 温晓花. 基于时滞系统IMC-PID的设计与整定[J]. 机械, 2019, 46(2):33-36. |
| Wen Xiaohua. Design and tuning of IMC-PID based on time delay system[J]. Machine, 2019, 46(2):33-36. | |
| [6] | 杜琛鑫. 时滞系统的PID稳定域及参数整定研究[D]. 大连: 大连海事大学, 2019:37-44. |
| Du Chenxin. Research on PID stabilization and parameters tuning of time delay systems[D]. Dalian: Dalian Maritime University, 2019:37-44. | |
| [7] | 任金霞, 蒋梦倩, 黄艺培. 一种复杂系统的分数阶内模PID控制器设计[J]. 江西理工大学报, 2020, 41(1):71- 76. |
| Ren Jinxia, Jiang Mengqian, Huang Yipei. Design of a fractional internal model PID controller for a complex system[J]. Journal of Jiangxi University of Science and Technology, 2020, 41(1):71-76. | |
| [8] | 朱景秀, 张伟, 王亚刚. 一类不稳定时滞对象的两自由度控制器设计[J]. 电子科技, 2021, 34(3):13-18. |
| Zhu Jingxiu, Zhang Wei, Wang Yagang. Two degrees of freedom control structure for one classes of unstable process with time-delay[J]. Electronic Science and Technology, 2021, 34(3):13-18. | |
| [9] | 赵仕艳, 谢子殿, 丁康康, 等. 粒子群优化BP-PID的矿井提升机调速系统[J]. 电子科技, 2021, 34(1):43-49. |
| Zhao Shiyan, Xie Zidian, Ding Kangkang, et al. Particle swarm optimization BP-PID of rotor variable frequency speed in mine hoisting system[J]. Electronic Science and Technology, 2021, 34(1):43-49. | |
| [10] |
Anil C, Padma Sree R. PID control of integrating systems using multiple dominant pole-placement method[J]. Asia-Pacific Journal of Chemical Engineering, 2015, 10(5):734-742.
doi: 10.1002/apj.v10.5 |
| [11] | Viteckova M, Vitecek A. Use of multiple dominant pole method for controller tuning[C]. New York: Proceedings of the Thirteenth International Carpathian Control Conference, 2012:27-34. |
| [12] |
Ajmeri M, Ali A. Simple tuning rules for integrating processes with large time delay[J]. Asian Journal of Control, 2015, 17(5):2033-2040.
doi: 10.1002/asjc.1119 |
| [13] |
Anil C, Padma Sree R. Tuning of PID controllers for integrating systems using direct synthesis method[J]. ISA Transactions, 2015, 57(7):211-219.
doi: 10.1016/j.isatra.2015.03.002 |
| [14] | 杨文刚. 适用于多种积分过程的鲁棒PID控制器设计方案[J]. 控制工程, 2016, 23(4):538-543. |
| Yang Wengang. A robust PID controller design method for multiple kinds of integrating systems[J]. Control Engineering of China, 2016, 23(4):538-543. | |
| [15] |
Vilanova R, Arrieta O, Ponsa P. Robust PI/PID controllers for load disturbance based on direct synthesis[J]. ISA Transactions, 2018, 81(3):177-196.
doi: 10.1016/j.isatra.2018.07.040 |
| [16] |
Rao A S, Rao V S R, Chidambaram M. Direct synthesis based controller design for integrating processes with time delay[J]. Journal of the Franklin Institute, 2009, 346(1):38-56.
doi: 10.1016/j.jfranklin.2008.06.004 |
| [17] | Ghousiya Begum K, Seshagiri Rao A, Radhakrishnan T K. Maximum sensitivity based analytical tuning rules for PID controllers for unstable dead time processes[J]. Chemical Engineering Research and Design, 2016, 10(9):593-606. |
| [18] | Astrom K J, Hagglund T. PID controllers[M]. Amsterdam: ISA Publishers, 1995:66-68. |
| [1] | TANG Kai,ZHANG Wei,HU Zhi,WANG Weike. Bipartite Formation Control of Swarm Systems Based on Output Feedback [J]. Electronic Science and Technology, 2023, 36(5): 41-46. |
| [2] | TANG Kai,ZHANG Wei,WANG Weike,HU Zhi. PI Formation Tracking Control for Distributed Heterogeneous Swarm Systems [J]. Electronic Science and Technology, 2023, 36(1): 21-27. |
| [3] | ZHENG Zheng,JIANG Pengfei,ZHANG Guopeng,LI Zihan. Comparison of Coordinated Control between Front and Rear Stages of Isolated AC-DC Solid-State Transformers [J]. Electronic Science and Technology, 2022, 35(7): 79-86. |
| [4] | SU Xiaohang,WANG Lihua,CHEN Jiaming. Research on Fatigue Life of Oil Cylinder System Based on Multi-Body Dynamics and Finite Element [J]. Electronic Science and Technology, 2022, 35(1): 40-44. |
| [5] | CHEN Jiaming,WANG Lihua,SU Xiaohang. Research on Mechanical Characteristics of Railway Bridge Ballast Bed Based on ADAMS [J]. Electronic Science and Technology, 2022, 35(1): 53-59. |
| [6] | WANG Yang,WANG Yagang. Identification Method Based on Step Response and Genetic Algorithm to Optimize Higher-Order Plus Time-Delay Model [J]. Electronic Science and Technology, 2021, 34(9): 41-46. |
| [7] | WANG Qingwen,HU Haiyang. Workflow Recognition Based on Temporal Action Detection [J]. Electronic Science and Technology, 2021, 34(8): 14-18. |
| [8] | HUANG Yuecheng,TONG Dongbing. Event-Based Fault Detection Filter with Packet Loss and Time-Varying Delay [J]. Electronic Science and Technology, 2021, 34(7): 7-12. |
| [9] | MA Ding,WU Dingxiang,TANG Lijun. Research on the Defect Method of Detection Circular Ceramic Metal Coating [J]. Electronic Science and Technology, 2021, 34(6): 28-33. |
| [10] | MENG Xiaojiao,ZHANG Shiwei,LI Xiaojian,LI Minyue,SONG Bingxin,LU Hongmin. An Evaluation Method of Vehicle-Mounted Communication Equipment Performance Based on BP Neural Network [J]. Electronic Science and Technology, 2021, 34(5): 24-28. |
| [11] | ZHU Jingxiu,ZHANG Wei,WANG Yagang. Two Degrees of Freedom Control Structure for One Classes of Unstable Process with Time-Delay [J]. Electronic Science and Technology, 2021, 34(3): 13-18. |
| [12] | SUN Yangyan,ZHOU Xiuying,REN Zhu. Security State Estimation and Detection for Biasing Attack [J]. Electronic Science and Technology, 2021, 34(12): 75-80. |
| [13] | ZHANG Ying,LIU Zilong,WAN Wei. UAV Vehicle Target Detection Based on Faster R-CNN [J]. Electronic Science and Technology, 2021, 34(11): 11-20. |
| [14] | CUI Bo,FANG Lingli,JIANG Quan,BI Chao. A Comparative Study of High-Speed Position Sensorless Control Technology in Surface Mounted Permanent Magnet Synchronous Motors [J]. Electronic Science and Technology, 2021, 34(10): 8-10. |
| [15] | LU Huan. Research on Improving the Efficiency of Parallel Charger Based on Constraint Optimizations [J]. Electronic Science and Technology, 2020, 33(8): 53-58. |
|
