Electronic Science and Technology ›› 2024, Vol. 37 ›› Issue (2): 23-29.doi: 10.16180/j.cnki.issn1007-7820.2024.02.004
Previous Articles Next Articles
BAI Rui1,REN Zhu2
Received:2022-10-25
Online:2024-02-15
Published:2024-01-18
Supported by:CLC Number:
BAI Rui,REN Zhu. Estimation and Performance Analysis of Unscented Kalman Filter with Randomly Missing Measurements[J].Electronic Science and Technology, 2024, 37(2): 23-29.
Table 1.
Data transmission diagram"
| k | λk | zk | yk |
|---|---|---|---|
| 1 | 1 | z1 | z1 |
| 2 | 0 | 丢包 | |
| 3 | 1 | z3 | z3 |
| 4 | 0 | 丢包 | |
| 5 | 0 | 丢包 | |
| 6 | 1 | z6 | z6 |
| 7 | 1 | z7 | z7 |
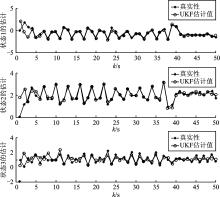
Figure 1.
Comparison between estimated value and real value of UKF"
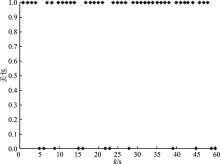
Figusre 2.
Time of packet loss"
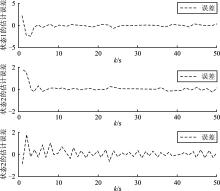
Figure 3.
Estimation error of UKF"
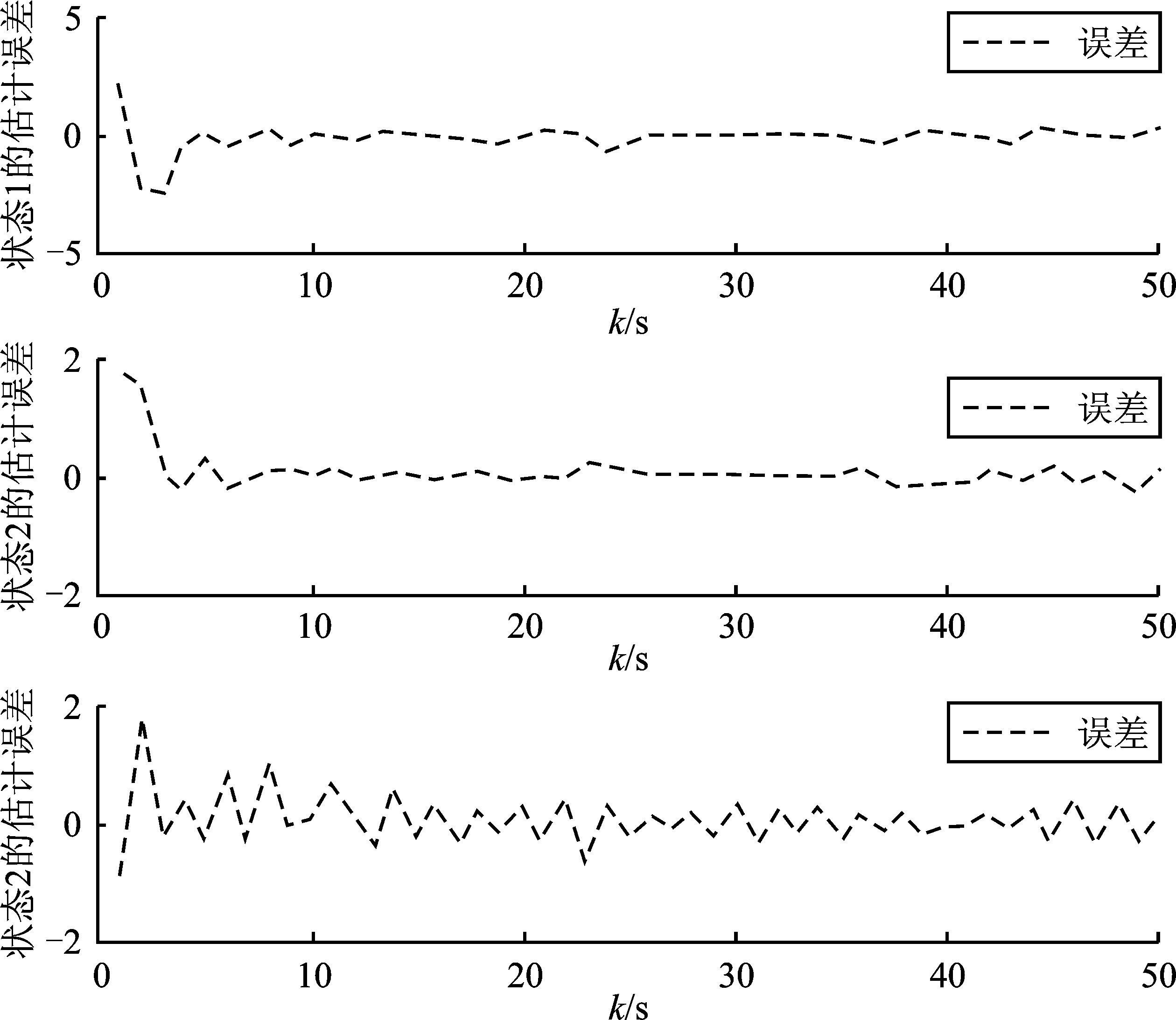
Figure 4.
ResAC module"
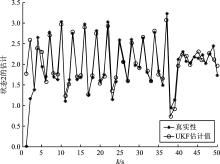
Figure 5.
ResAC-CSPDarknet backbone network"
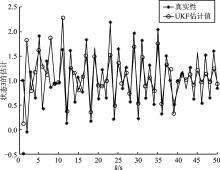
Figure 6.
4-FPN-PAN feature fusion enhanced network"

Figure 7.
Trajectory comparison of x1,k"
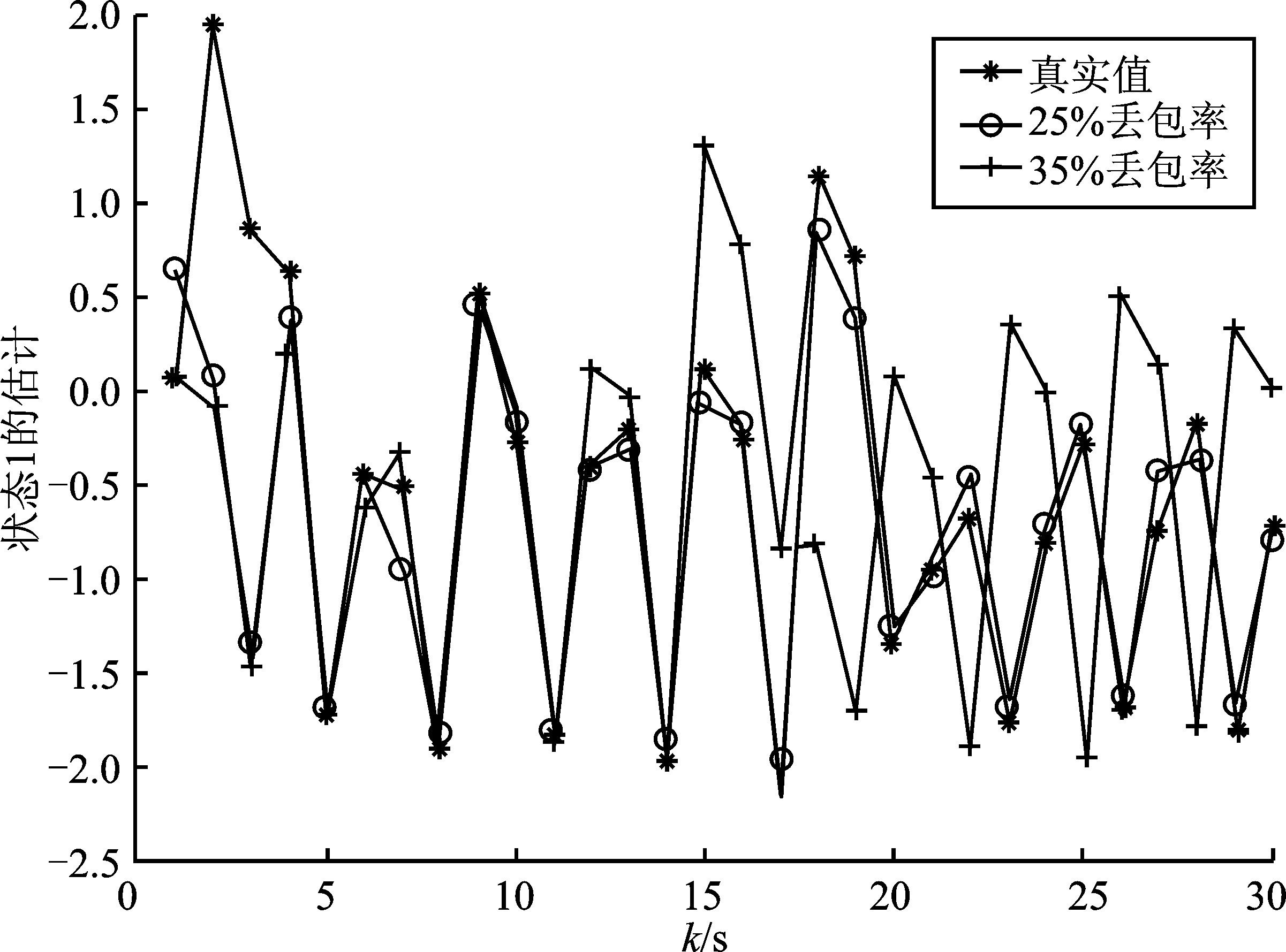
Figure 8.
Trajectory comparison of x2,k"

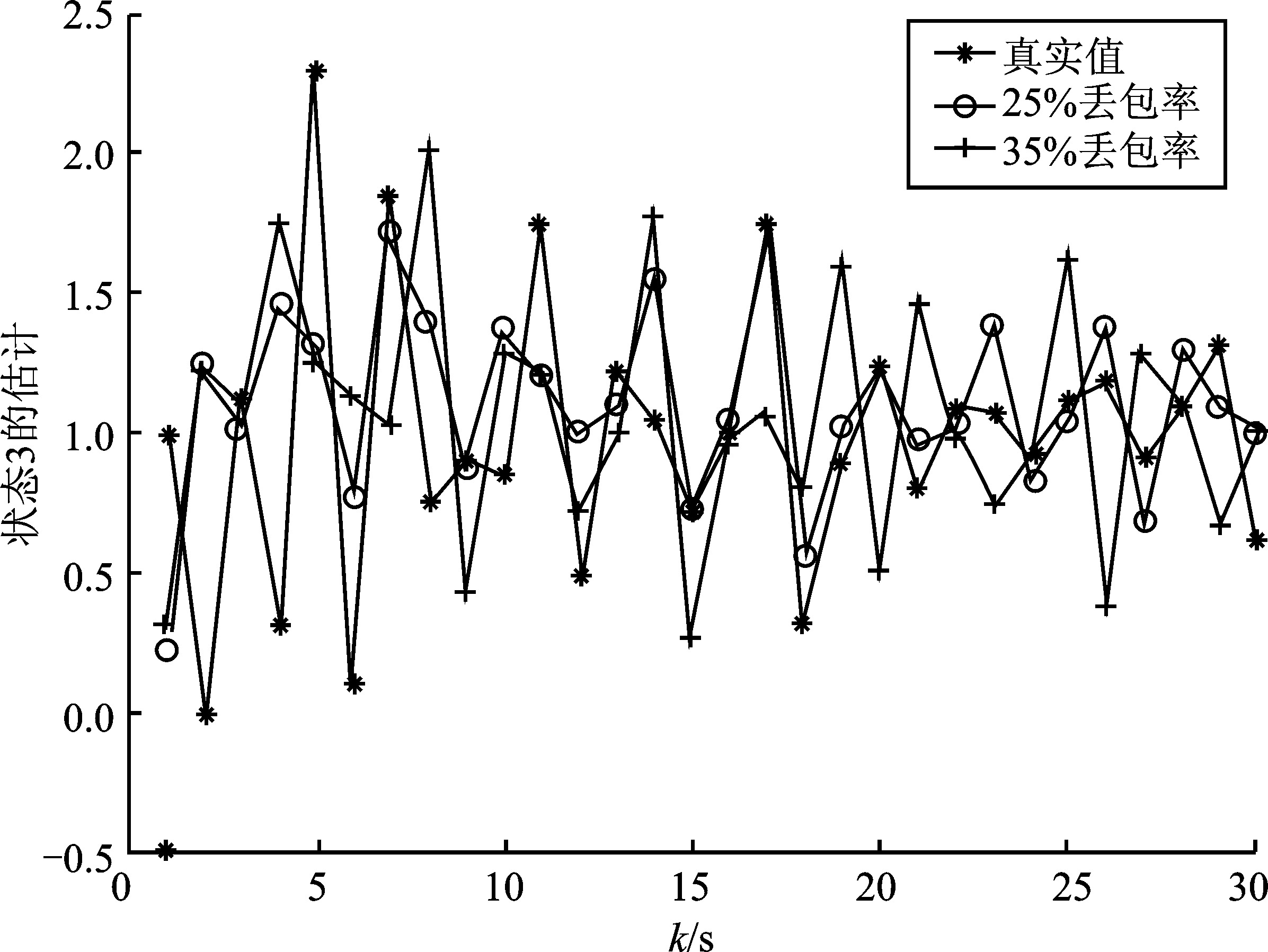
Figure 9.
Trajectory comparison of x3,k"
| [1] | 李建宁. 无线网络控制系统的建模与控制[D]. 杭州: 浙江大学, 2013:31-50. |
| Li Jianning. Modeling and control of wireless network control system[D]. Hangzhou: Zhejiang University, 2013:31-50. | |
| [2] | 郭小华. 基于无线传感器网络的无线网络控制系统研究[D]. 杭州: 浙江大学, 2008:12-42. |
| Guo Xiaohua. Research on wireless network control system built on wireless sensor networks[D]. Hangzhou: Zhejiang University, 2008:12-42. | |
| [3] |
Hassan M, Salut G, Singh M, et al. A decentralized computational algorithm for the global Kalman filter[J]. IEEE Transactions on Automatic Control, 1978, 23(2):262-268.
doi: 10.1109/TAC.1978.1101713 |
| [4] | Alriksson P, Rantzer A. Experimental evaluation of a distributed Kalman filter algorithm[C]. New Orleans: The Forty-sixth IEEE Conference on Decision and Control, 2007:562-570. |
| [5] | Shi L. Resource optimization for networked estimator with guaranteed estimation quality[D]. Pasadena: California Institute of Technology, 2009:34-40. |
| [6] |
Shi L, Johansson K H, Murray R M. Estimation over wireless sensor networks:Tradeoff between communication,computation and estimation qualities[J]. IFAC Proceedings Volumes, 2008, 41(2):605-611.
doi: 10.3182/20080706-5-KR-1001.00102 |
| [7] | 孙杨燕, 周秀莹, 任祝. 针对偏差攻击的安全状态估计与检测[J]. 电子科技, 2021, 34(12):75-80. |
| Sun Yangyan, Zhou Xiuying, Ren Zhu. Security state estimation and detection for biasing sttack[J]. Electronic Science and Technology, 2021, 34(12):75-80. | |
| [8] |
Sinopoli B, Schenato L, Franceschetti M, et al. Kalman filtering with intermittent observations[J]. IEEE Transactions on Automatic Control, 2004, 49(9):1453-1464.
doi: 10.1109/TAC.2004.834121 |
| [9] | Huang M, Dey S. Kalman filtering with markovian packet losses and stability criteria[C]. San Diego: Proceedings of the Forty-fifth IEEE Conference on Decision and Control, 2006:604-610. |
| [10] |
Shi L, Epstein M, Murray R M. Kalman filtering over a packet-dropping network:A probabilistic perspective[J]. IEEE Transactions on Automatic Control, 2010, 55(3):594-604.
doi: 10.1109/TAC.2009.2039236 |
| [11] |
Mohammadzadeh A, Tavassoli B, Moaveni B. Simultaneous estimation of state and packet-loss occurrences in networked control systems[J]. ISA Transactions, 2020, 107(1):307-315.
doi: 10.1016/j.isatra.2020.08.006 |
| [12] |
郭戈, 王宝凤. 多丢包不确定离散系统的鲁棒Kalman滤波[J]. 自动化学报, 2010, 36(5):767-772.
doi: 10.3724/SP.J.1004.2010.00767 |
|
Guo Ge, Wang Baofeng. Robust Kalman filteringfor uncertain discrete-time systems with multiple packet dropouts[J]. Acta Automatica Sinica, 2010, 36(5):767-772.
doi: 10.3724/SP.J.1004.2010.00767 |
|
| [13] | Liu Y G, Xu B G, Shi B H. Kalman filtering for stochastic systems with consecutive packet losses and measurement time delays[J]. Control Theory & Applications, 2013, 30(7):898-908. |
| [14] | 王帅, 杨文, 侍洪波. 带丢包一致性滤波算法研究[J]. 自动化学报, 2010, 36(12):1689-1696. |
| Wang Shuai, Yang Wen, Shi Hongbo. Consensus-based f-iltering algorithm with packet-dropping[J]. Acta Auto-matica Sinica, 2010, 36(12):1689-1696. | |
| [15] | 谢可心, 杨春曦, 刘华, 等. 卡尔曼一致性滤波器的丢包性能分析及能量优化[J]. 控制理论与应用, 2018, 35(8):1177-1185. |
| Xie Kexin, Yang Chunxi, Liu Hua, et al. Packet-dropout performance and energy optimization of the distributed Kalman consensus filter[J]. Control Theory & Applications, 2018, 35(8):1177-1185. | |
| [16] | Wang J B, Luo X L. Research on airborne passive location based on extend Kalman filter with control inputs[C]. Beijing: The Third International Conference on Information Science and Control Engineering, 2016:702-708. |
| [17] | Han L, Cai W T, Pu X J, et al. Method on fetal electr ocardiogram extraction utilizing light GBM combinedwith EKF[C]. Chongqing: The Thirteenth International Conference on Communication Software and Networks, 2021:142-149. |
| [18] |
Julier S J, Uhlmann J K. A new method for nonlinear transformation of means and covariances in filters and estimators[J]. IEEE Transactions on Automatic Control, 2000, 45(3):477-482.
doi: 10.1109/9.847726 |
| [19] | 谯小康, 屈小媚. 基于车辆与车辆的车联网分布式协同感知定位[J]. 控制理论与应用, 2021, 38(7):988-996. |
| Qiao Xiaokang, Qu Xiaomei. Vehicle to vehicle-based distributed cooperative sensing positioning for internet of vehicles[J]. Control Theory & Applications, 2021, 38(7):988-996. | |
| [20] |
Li L, Yu D D, Xia Y Q, et al. Remote nonlinear state estimation with stochastic event-triggered sensor schedule[J]. IEEE Transactions on Cybernetics, 2019, 49(1):734-745.
doi: 10.1109/TCYB.6221036 |
| [21] |
Xu L, Ma K, Fan H X. Unscented Kalman filtering for nonlinear state estimation with correlated noises and missing measurements[J]. International Journal of Control,Automation and Systems, 2018, 16(3):1011-1020.
doi: 10.1007/s12555-017-0495-2 |
