Electronic Science and Technology ›› 2023, Vol. 36 ›› Issue (5): 47-54.doi: 10.16180/j.cnki.issn1007-7820.2023.05.008
Previous Articles Next Articles
LIN Zhipeng1,SUN Xiaohui1,WEN Chenglin2
Received:2021-11-23
Online:2023-05-15
Published:2023-05-17
Supported by:CLC Number:
LIN Zhipeng,SUN Xiaohui,WEN Chenglin. An Extended Dimension Kalman Filter Method Based on Additive Hidden Variables[J].Electronic Science and Technology, 2023, 36(5): 47-54.
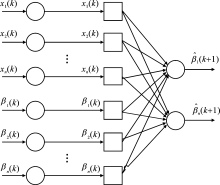
Figure 1.
Structure of multi-dimensional Taylor network"
Table 1.
Comparison of mean square error of different filters"
| EKF | STF | HV-KF | HV-STF | ||||||
|---|---|---|---|---|---|---|---|---|---|
| HV-KF | VSEKF | VS STF | HV-STF | VS EKF | VS STF | ||||
| 情况1 | 7.819 7×10-4 | 5.105 1×10-4 | 5.059 1×10-4 | 35.30% | 0.59% | 5.025 9×10-4 | 35.73% | 1.02% | |
| 情况2 | 8.532 7×10-4 | 4.497 5×10-4 | 4.401 1×10-4 | 48.42% | 1.13% | 4.389 8×10-4 | 48.55% | 1.26% | |
| 情况3 | 9.407 4×10-4 | 5.586 6×10-4 | 5.527 0×10-4 | 41.24% | 0.63% | 5.437 5×10-4 | 42.20% | 1.59% | |
| 情况4 | 10.000 0×10-4 | 6.161 5×10-4 | 6.022 6×10-4 | 39.77% | 1.38% | 6.009 5×10-4 | 39.91% | 1.52% | |
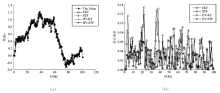
Figure 2.
Simulation results under normal conditions (a)The real value and estimated value of x (b)Estimation error of x"
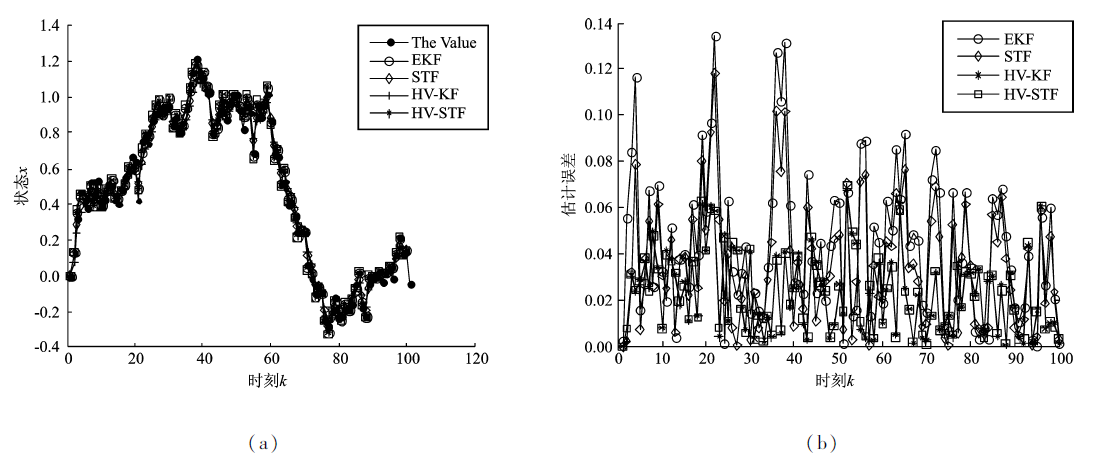
Table 2.
Comparison of mean square error of different filters (x1)"
| EKF | STF | HV-KF | HV-STF | ||||||
|---|---|---|---|---|---|---|---|---|---|
| HV-KF | VSEKF | VS STF | HV-STF | VS EKF | VS STF | ||||
| 情况1 | 6.561 1×10-4 | 7.678 0×10-5 | 7.675 8×10-5 | 88.30% | 0.01% | 7.673 0×10-5 | 88.31% | 0.02% | |
| 情况2 | 8.064 8×10-4 | 1.131 0×10-4 | 1.128 9×10-4 | 86.00% | 0.02% | 1.117 2×10-4 | 86.15% | 0.17% | |
| 情况3 | 7.204 9×10-4 | 1.057 4×10-4 | 1.032 2×10-4 | 85.67% | 0.35% | 1.028 9×10-4 | 85.72% | 0.40% | |
| 情况4 | 7.355 0×10-4 | 8.720 0×10-5 | 8.590 1×10-5 | 88.32% | 0.18% | 8.476 8×10-5 | 88.47% | 0.33% | |
Table 3.
Comparison of mean square error of different filters(x2)"
| EKF | STF | HV-KF | HV-STF | ||||||
|---|---|---|---|---|---|---|---|---|---|
| HV-KF | VSEKF | VS STF | HV-STF | VS EKF | VS STF | ||||
| 情况1 | 7.4835×10-4 | 1.2812×10-4 | 1.1800×10-4 | 84.23% | 1.35% | 1.0142×10-4 | 86.44% | 3.56% | |
| 情况2 | 7.3689×10-4 | 9.8964×10-5 | 9.7096×10-5 | 86.82% | 0.25% | 9.6632×10-5 | 86.89% | 0.32% | |
| 情况3 | 7.2325×10-4 | 8.9620×10-5 | 8.7261×10-5 | 87.93% | 0.33% | 8.6009×10-5 | 88.11% | 0.51% | |
| 情况4 | 8.7152×10-4 | 1.4497×10-4 | 1.1473×10-4 | 86.84% | 3.47% | 1.0415×10-4 | 88.05% | 4.68% | |

Figure 3.
Simulation results of different filters under normal conditions (a)The real value and estimated value of x1 (b)The real value and estimated value of x2 (c)Estimation error of x1 (d)Estimation error of x2"
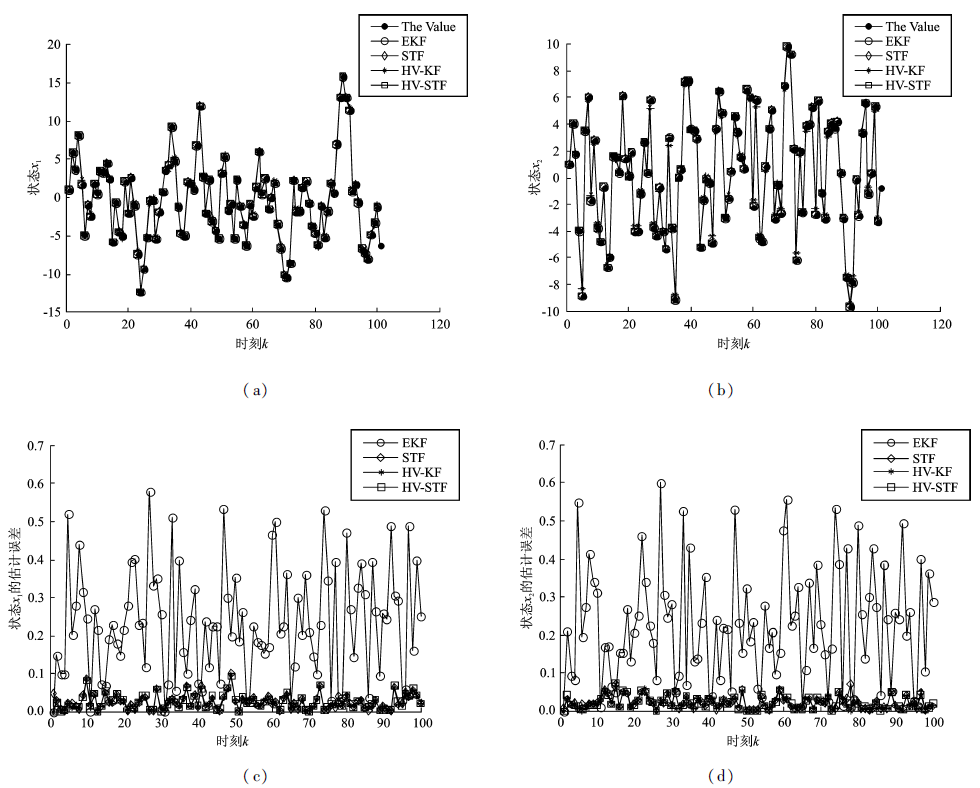
Table 4.
Computational complexity of the algorithm"
| EKF | 本文算法 | |
|---|---|---|
| 动态关联模型 | 0 | 4n3-n2 |
| 状态一步预测 | 2n2-n | 2N2-N |
| 一步预测协方差 | 4n3-n2 | 4N3-N2 |
| 增益矩阵 | 7n3-n2 | 7N3-N2 |
| 新息序列 | 2nm-n+m | 2NM-N+M |
| 状态估计 | 2nm+n-m | 2NM+N-M |
| 估计误差协方差 | 2n3-2nm2 | 2N3-2NM2 |
| 总和 | 13n3+2nm2-n2+4nm-n | 13N3+2NM2-N2+4NM-N+4n3-n2 |
| [1] | 朱书军, 刘伟峰, 崔海龙. 基于广义标签多伯努利滤波的可分辨群目标跟踪算法[J]. 自动化学报, 2017, 43(12):2178-2189. |
| Zhu Shujun, Liu Weifeng, Cui Hailong. Multiple resolvable groups tracking using the GLMB fifilter[J]. Acta Automatica Sinica, 2017, 43(12):2178-2189. | |
| [2] | 胡艳艳, 金增旺, 薛晓玲, 等. 基于异步IMM融合滤波的网络化系统故障诊断[J]. 自动化学报, 2017, 43(8):1329-1338. |
| Hu Yanyan, Jin Zengwang, Xue Xiaoling, et al. Fault diagnosis for networked systems by asynchronous IMM fusion fifiltering[J]. Acta Automatica Sinica, 2017, 43(8):1329-1338. | |
| [3] | Hajati N, Rezaeizadeh A. A wearble pedestrian localization and gait identification system using Kalman filter inertial data[J]. IEEE Transactions on Instrumentation and Measurement, 2021, 70(3):1-8. |
| [4] | 朱军, 李紫豪, 刘炳辰, 等. 基于自适应插值扩展卡尔曼滤波的永磁同步电机状态估计[J]. 电子科技, 2020, 33(5):66-71. |
| Zhu jun, Li Zihao, Liu Bingchen, et al. State estimation for permanent magnet synchronous motor based on adaptive interpolation extended Kalman filter[J]. Electronic Science and Technology, 2020, 33(5):66-71. | |
| [5] | Feng D Q, Wang C Q, He C L, et al. Kalman-filter-based integration of IMU and UWB for high-accuracy indoor positioning and navigation[J]. IEEE Internet of Things Journal, 2020, 7(4):3313-3146. |
| [6] |
Chauhan S V S, Gao G X. Spoofing resilient state estimation for the power grid using an extended Kalman filter[J]. IEEE Transactions on Smart Grid, 2021, 12(4):3404-3414.
doi: 10.1109/TSG.2021.3051920 |
| [7] |
Wang X X, Xu Z S, Gou X J, et al. Tracking a maneuvering target by multiple sensors using extended Kalman filter with nested probabilistic-numerical linguistic information[J]. IEEE Transactions on Fuzzy Systems, 2020, 28(2):346-360.
doi: 10.1109/TFUZZ.91 |
| [8] | Wen C L, Cheng X S, Xu D X, et al. Filter design based on characteristic functions for one class of multi-dimensional nonlinear non-Gaussian systems[J]. Automatica, 2017(82):171-180. |
| [9] | Wen C B, Wang Z D, Hu J, et al. Recursive filtering for state-saturated systems with randomly occurring nonlinearities and missing measurements[J]. International Journal of Robust and Nonlinearity Control, 2018(28):1715-1727. |
| [10] | Kalman R E, Bucy R S. New results in linear filtering and prediction theory[J]. Journal of Basic Engineering, 1961(83):95-108. |
| [11] | Sunahara Y. An approximate method of state estimation for nonlinear dynamical systems[J]. Fluids Engineering, 1970, 11(6):957-972. |
| [12] | 孟祥飞. 基于扩展卡尔曼滤波算法的无源定位效果分析[J]. 电子科技, 2012, 25(3):25-27. |
| Meng Xiangfei. Analysis of the effects of passive location based on the extended Kalman filtering algorithm[J]. Electronic Science and Technology, 2012, 25(3):25-27. | |
| [13] |
Sun Y, Work D B. Scaling the Kalman filter for large-scale traffic estimation[J]. IEEE Transactions on Control of Network Systems, 2018, 5(3):968-980.
doi: 10.1109/TCNS.6509490 |
| [14] |
Zhao J B, Netto M, Mili L. A robust iterated extended Kalman filter for power system dyamic state estimation[J]. IEEE Transactions on Power Systems, 2017, 32(4):3205-3216.
doi: 10.1109/TPWRS.2016.2628344 |
| [15] | Kushner H J. Dynamical equations for optimal nonlinear filtering[J]. Journal of Different Equations, 1967, 3(2):179-190. |
| [16] | 文成林, 周东华. 多尺度估计理论及其应用[M]. 北京: 清华大学出版社, 2002:11-19. |
| Wen Chenglin, Zhou Donghua. Multiscale estimation theory and application[M]. Beijing: Tsinghua University Press, 2002:11-19.. | |
| [17] | 周东华, 叶银忠. 现代故障诊断与容错控制[M]. 北京: 清华大学出版社, 2000:23-51. |
| Zhou Donghua, Ye Yinzhong. Modern fault diagnosis and fault-tolerant control[M]. Beijing: Tsinghua University Press, 2000:23-51. | |
| [18] | 刘铭, 周东华. 残差归一化的强跟踪滤波器及其应用[J]. 中国电机工程学报, 2005, 25(2):74-78. |
| Liu Ming, Zhou Donghua. Normalized residuals based strong tracking filter and its application[J]. Proceedings of the CSEE, 2005, 25(2):74-78. | |
| [19] | 张超, 严洪森. 基于最优结构多维泰勒网的含噪声非线性时变系统辨识[J]. 东南大学学报(自然科学版), 2017, 47(6):1086-1093. |
| Zhang Chao, Yan Hongsen. Identification of nonlinear time-varying system with nosise based on multi-demensional Taylor network with optimal structure[J]. Journal of Southeast University(Natural Science Edition), 2017, 47(6):1086-1093. | |
| [20] | 张召友, 郝燕玲, 吴旭. 3种确定性采样非线性滤波算法的复杂度分析[J]. 哈尔滨工业大学学报, 2013, 45(12):111-115. |
| Zhang Zhaoyou, Hao Yanling, Wu Xu. Complexity analysis of three deterministic sampling nonlinear filtering algorithms[J]. Journal of Harbin Institute of Technolgy, 2013, 45(12):111-115. |
| [1] | ZHOU Qiping,HE Wei,JIA Lei,GUO Junkai,ZHAO Jianguo. Research on Internet of Vehicles Navigation Technology Based on BDS and Edge Computing [J]. Electronic Science and Technology, 2023, 36(1): 51-59. |
| [2] | Sunyun YANG,Xiu KAN. Design of Biological Behavior Analysis System Based on Vision and IMU Sensors [J]. Electronic Science and Technology, 2022, 35(4): 28-34. |
| [3] | HU Wenqiang,HU Jianpeng. WiFi/PDR Fusion Real-Time Localization Algorithm Based on Region Constraint [J]. Electronic Science and Technology, 2022, 35(10): 21-26. |
| [4] | QIN Zhenliang,ZHANG Tao,LIU Yanping,LIU Zhihua. Adaptive Polynomial Pre-distortion Technology Based on the Genetic Algorithm [J]. , 2014, 27(4): 12-. |
| [5] | WANG Jingwei,DONG Dawei,HUA Chunrong,YAN Bing. Analysis of the Influencing Factors of EKF [J]. , 2013, 26(8): 10-. |
| [6] | HAN Chun-Lei, CHEN Chi-Lian, SONG Ming, YANG Li. Application of Kalman Filter in Passive Target Tracking [J]. , 2012, 25(4): 47-. |
| [7] | MENG Xiang-Fei. Analysis of the Effects of Passive Location Based on the Extended Kalman Filtering Algorithm [J]. , 2012, 25(3): 25-. |
| [8] | HU Hai-Xu, LUO Wen-Guang. Adaptive Sliding Mode Control for a Class of Affine Nonlinear System Based on Neural Networks [J]. , 2011, 24(4): 12-. |
| [9] | DING Jie, HU Shan-Wen, ZHANG Xiao-Dong, GAO Huai. The Effects of CBC on the Nonlinearity of the HBT Power Amplifier [J]. , 2011, 24(1): 115-. |
|
