Electronic Science and Technology ›› 2024, Vol. 37 ›› Issue (5): 54-61.doi: 10.16180/j.cnki.issn1007-7820.2024.05.008
Previous Articles Next Articles
FENG Gaoming, QIU Wenxian, JIN Minglei
Received:2022-11-24
Online:2024-05-15
Published:2024-05-21
Supported by:CLC Number:
FENG Gaoming, QIU Wenxian, JIN Minglei. Research on S-Type Speed Control Strategy of Vending Machine Lifting System[J].Electronic Science and Technology, 2024, 37(5): 54-61.
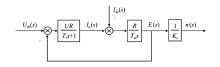
Figure 1.
Dynamic structure of DC motor"
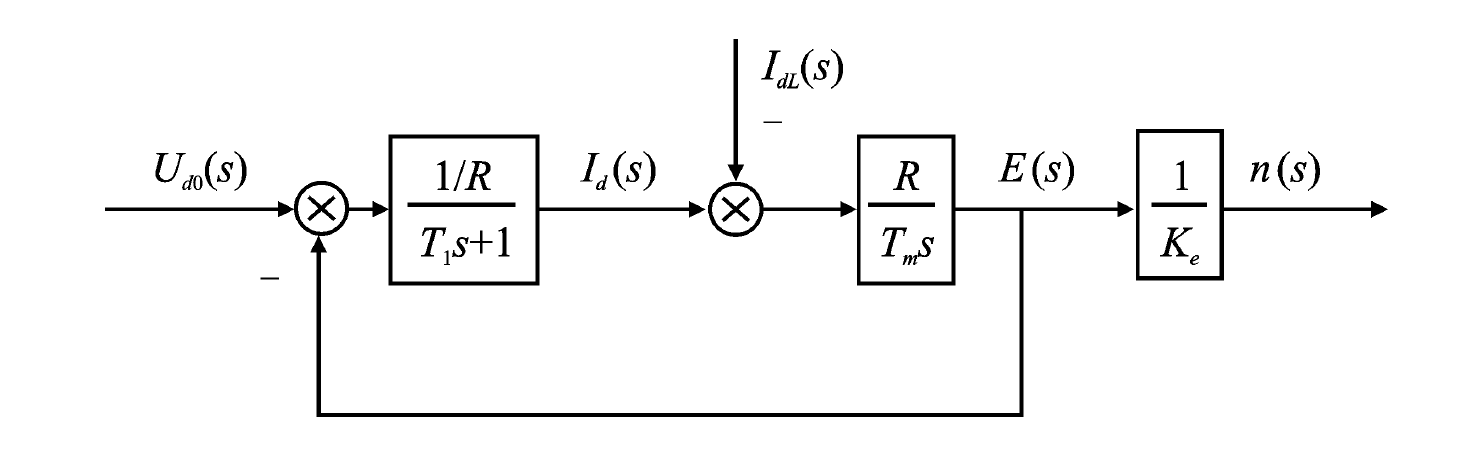
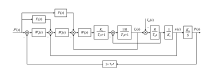
Figure 2.
Feed forward differential negative feedback control"
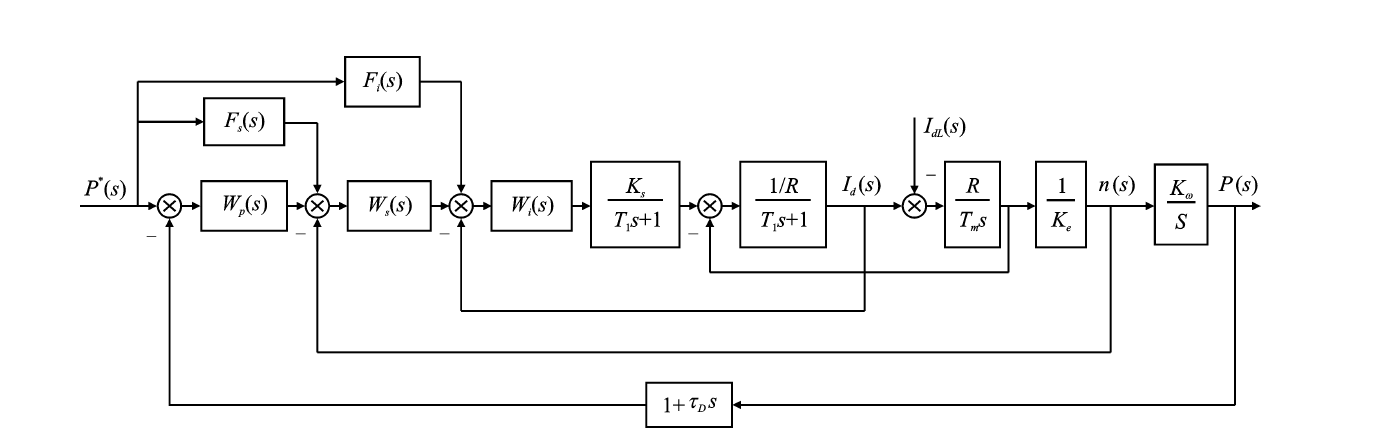
Figure 3.
Principle of lifting system control strategy"
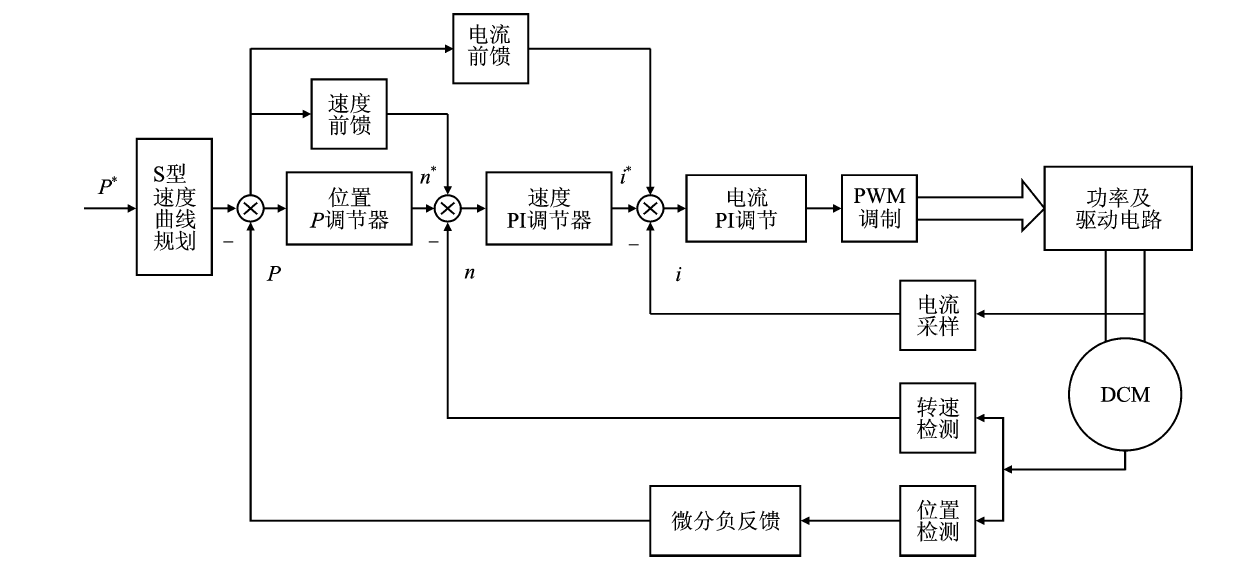
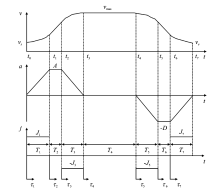
Figure 4.
S-shaped velocity curve"
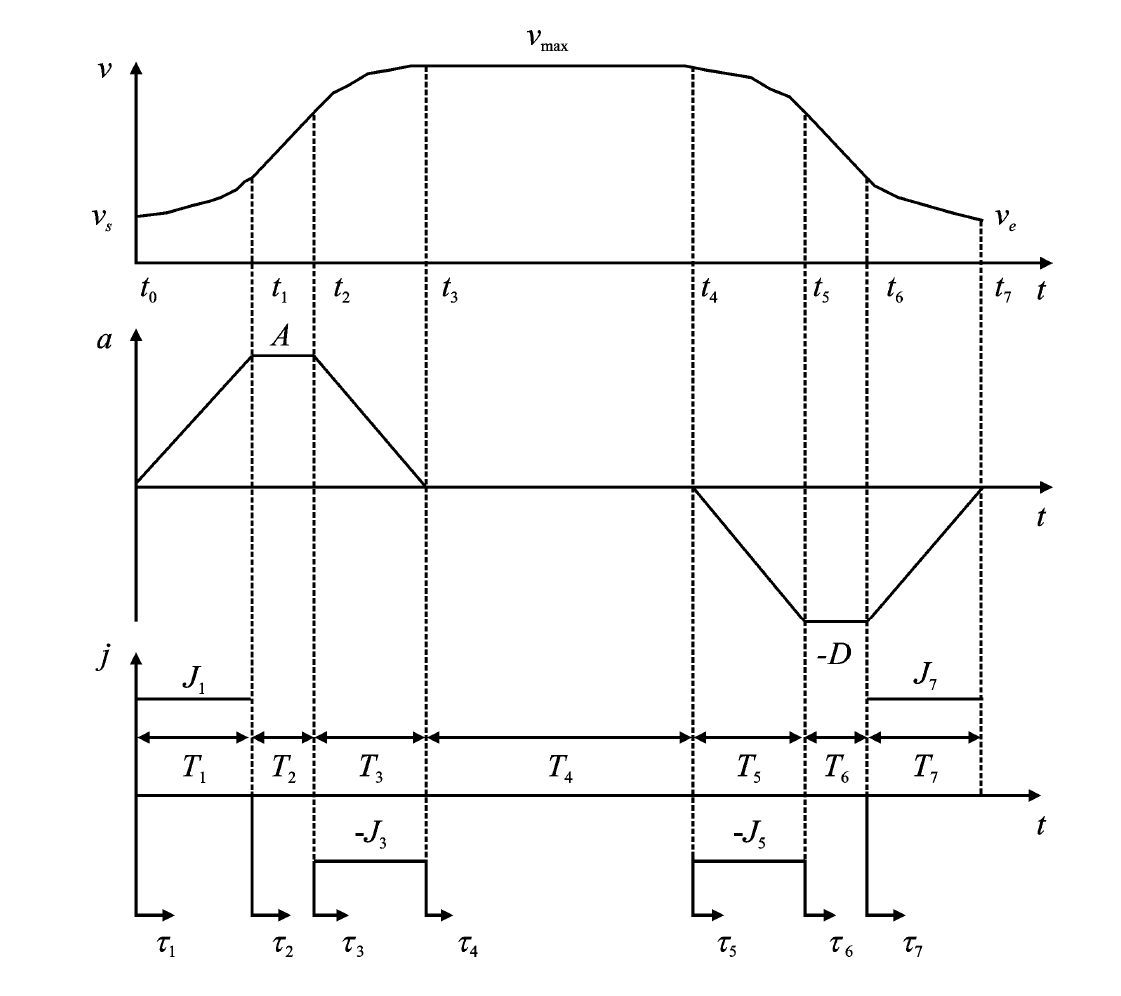

Figure 5.
S-shaped speed curve simulation (a)s=8 rad (b)s=160 rad (c)s=320 rad"
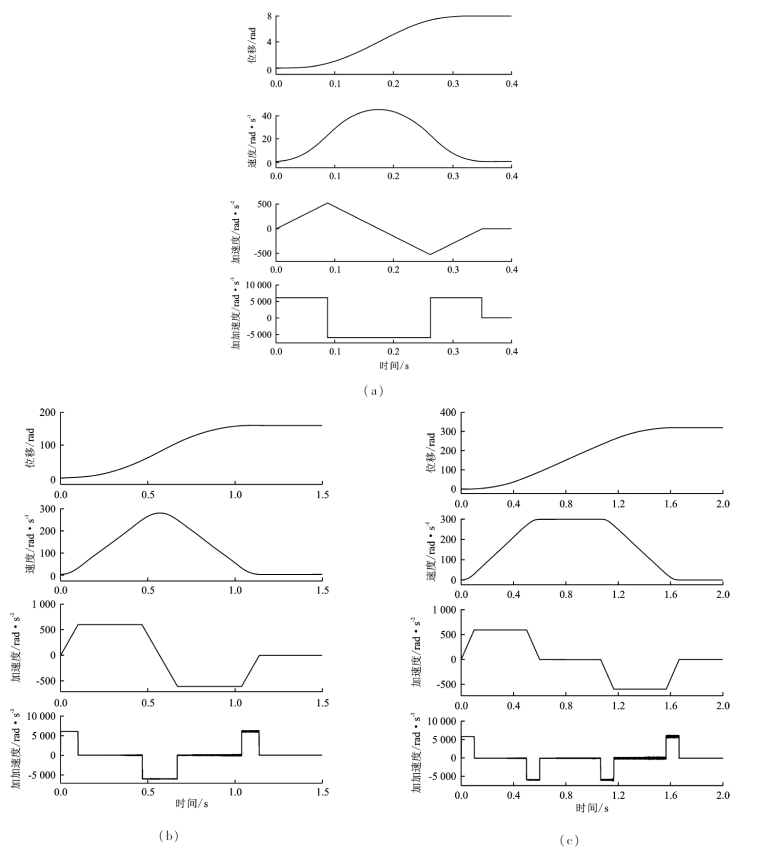
Figure 6.
Simulation model"
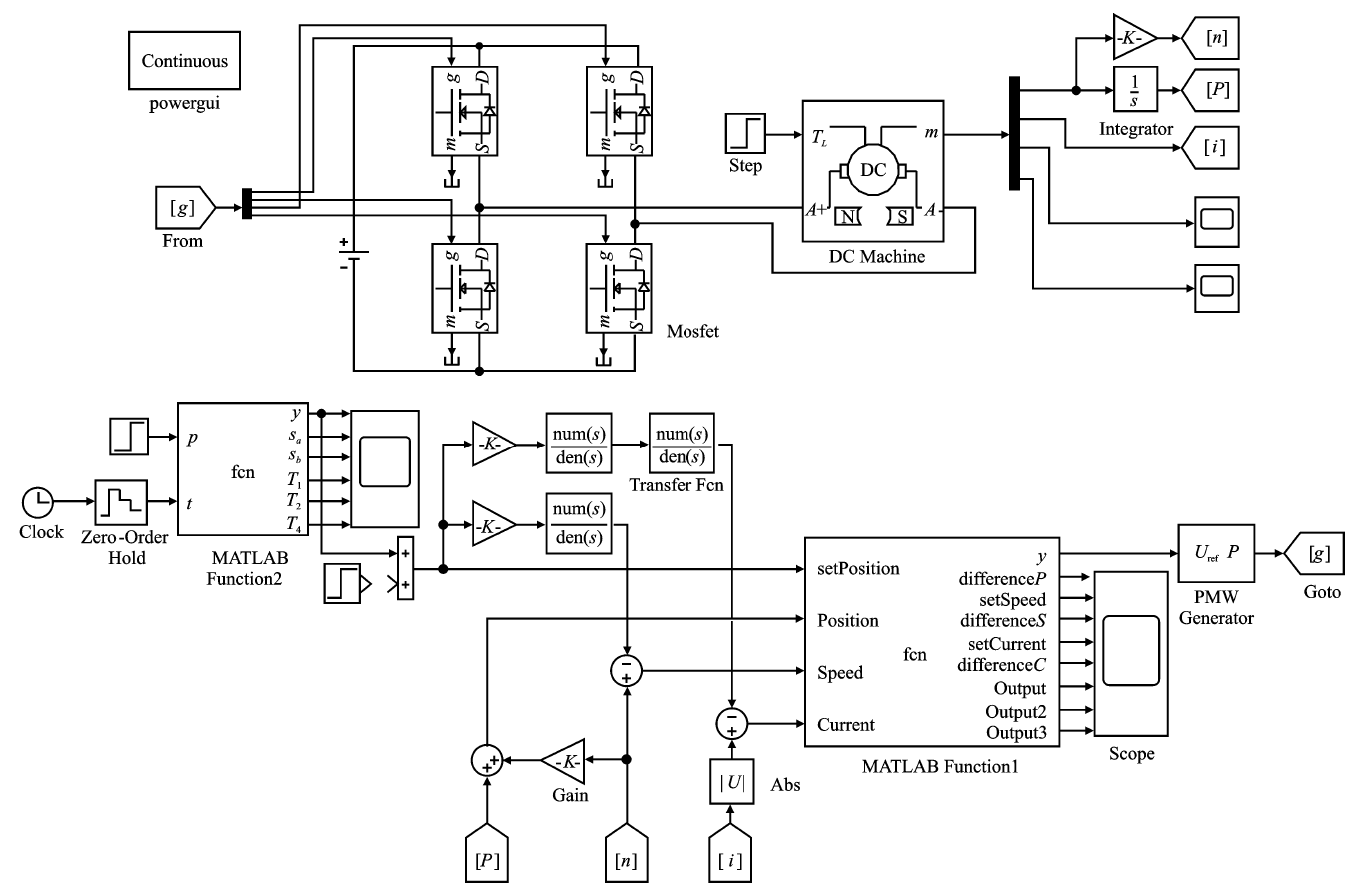

Figure 7.
Motor simulation waveform (a)Direct given (b)S-shaped velocity curve is given"

Table 1.
Parameters of the experimental motor"
| 参数 | 数值 |
|---|---|
| 电枢电阻/Ω | 4.8 |
| 电枢电感/H | 0.003 6 |
| 电动势系数/V·rpm-1 | 0.001 093 |
| 转动惯量/kg·m2 | 0.000 001 7 |
| 额定功率/W | 10 |
| 额定电压/V | 12 |
| 额定转速/rpm | 9 900 |

Figure 8.
The experimental facility"
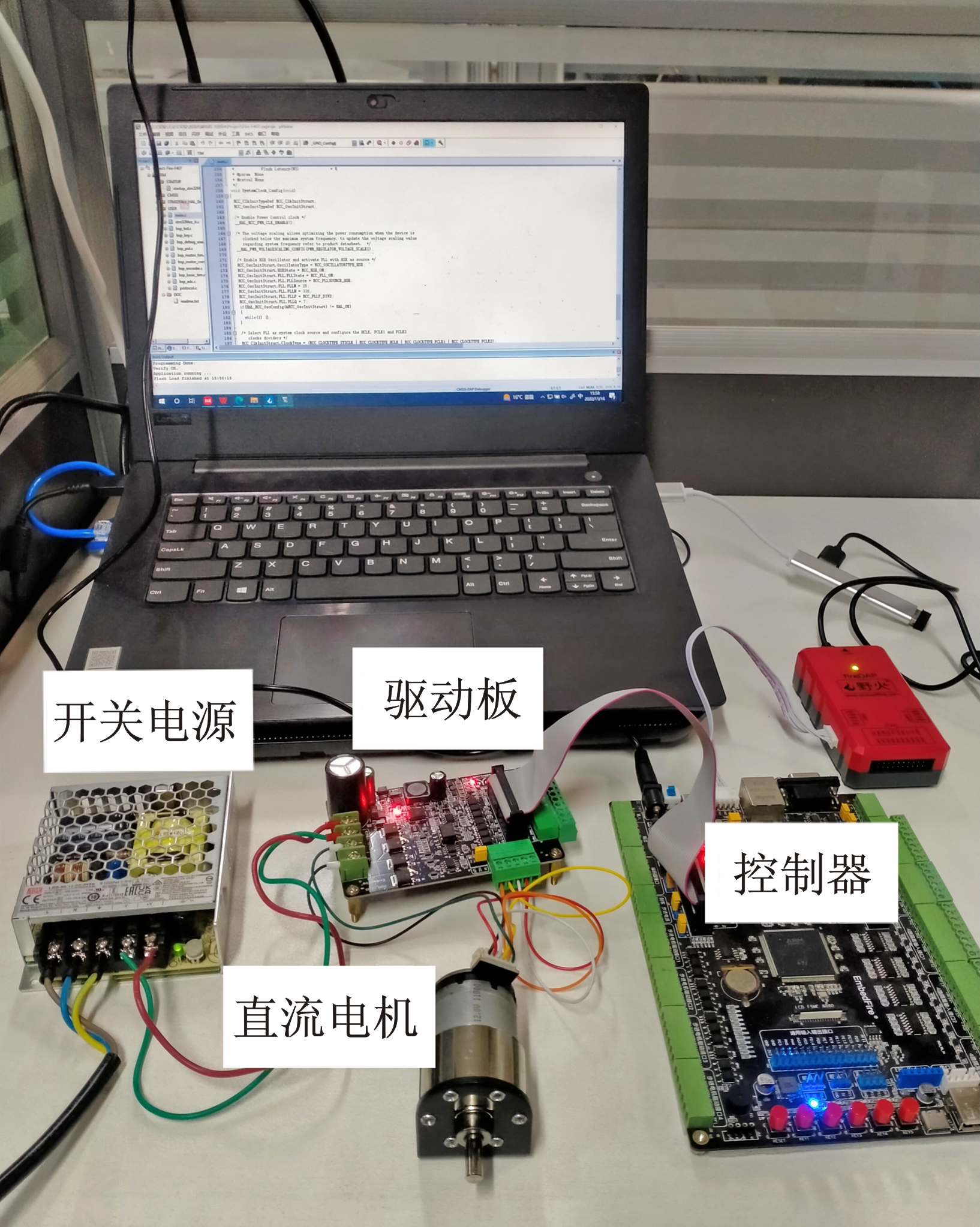
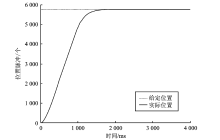
Figure 9.
Directly feed timed position waveform"
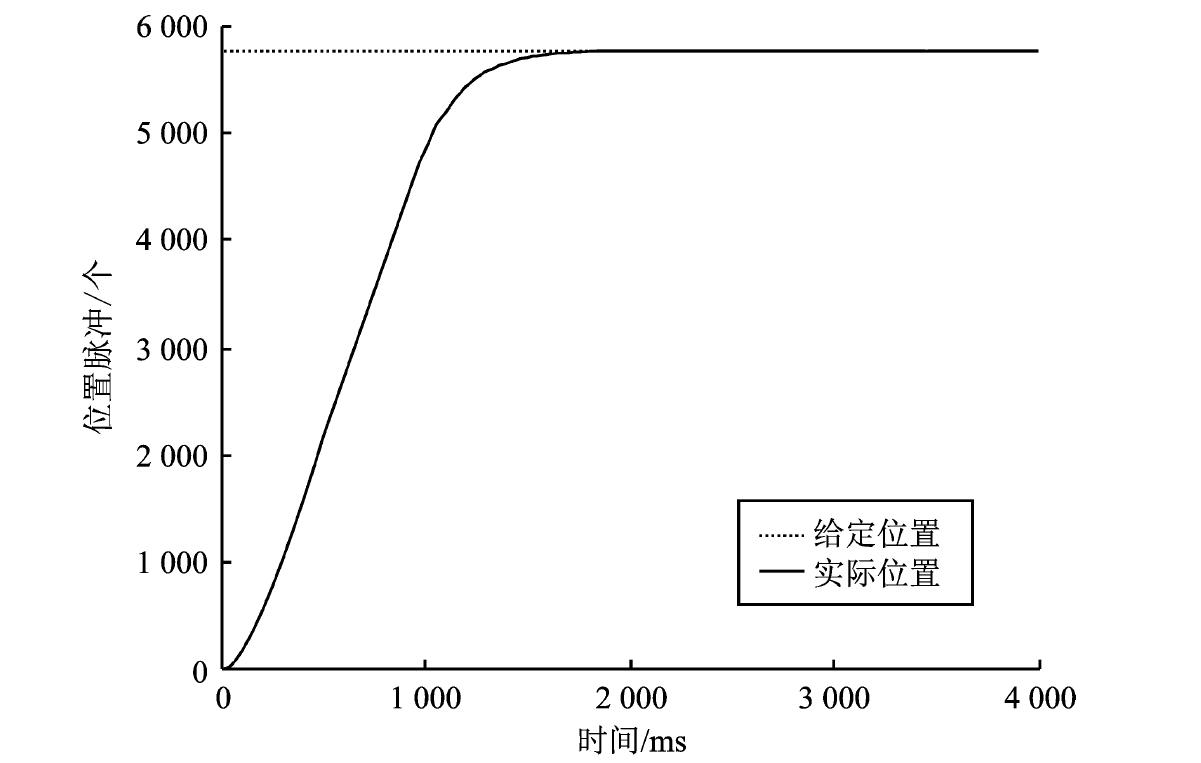

Figure 10.
Directly feed timed velocity waveform"
Figure 11.
Position waveform under S-type acceleration and deceleration algorithm"
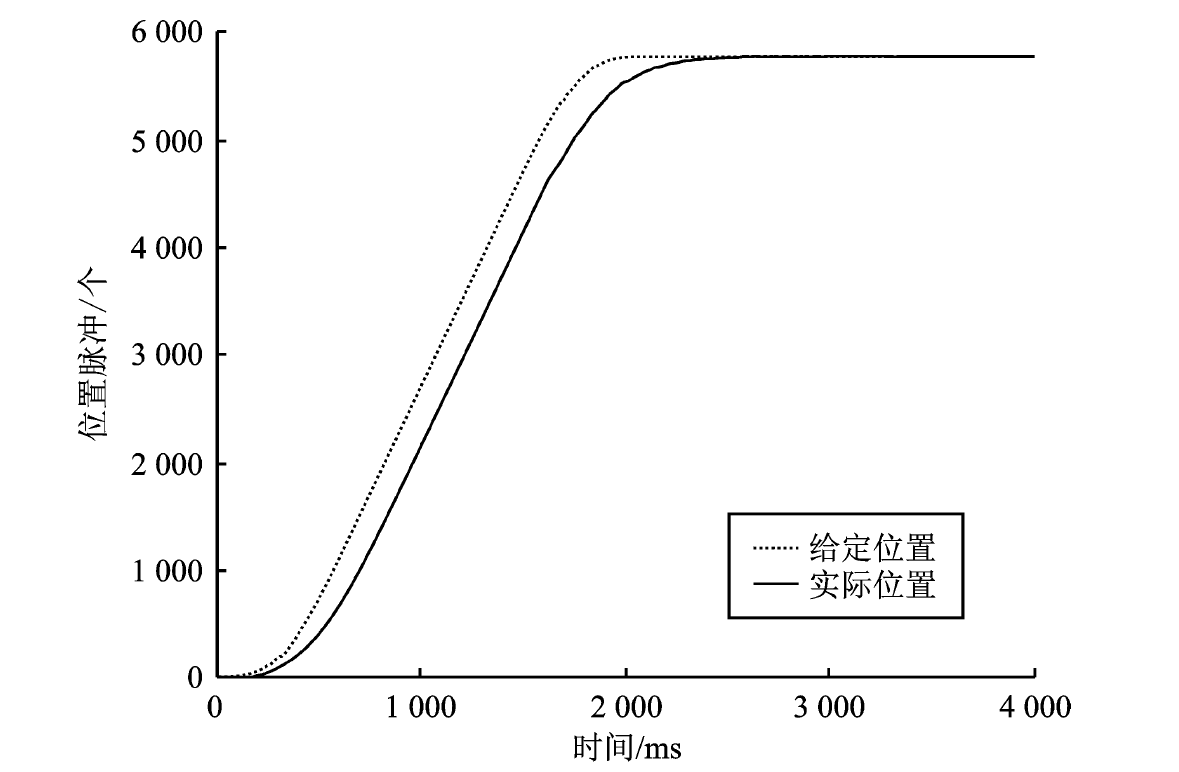

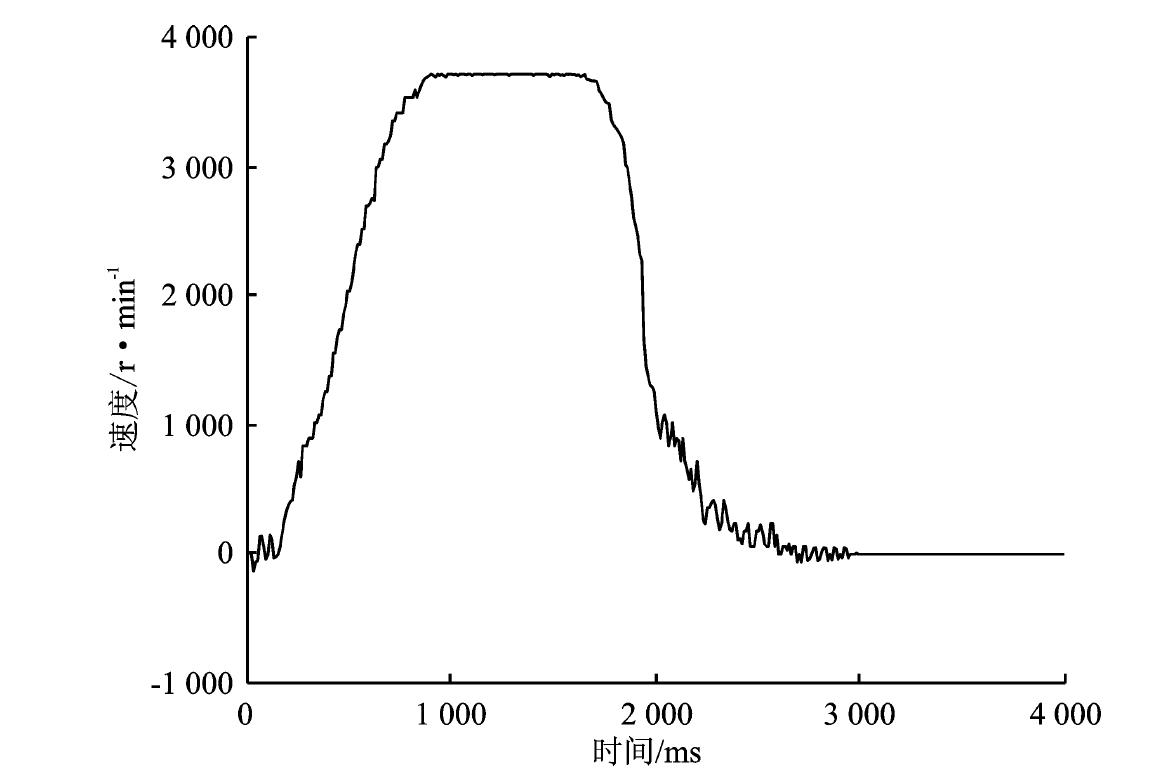
Figure 12.
Velocity waveform under S-type acceleration and deceleration algorithm"
| [1] | 梁永馨, 王凤越. 自动售货机的发展现状及趋势[J]. 当代经济, 2019(2):80-83. |
| Liang Yongxin, Wang Fengyue. The development statusand trend of vending machine[J]. Contemporary Economics, 2019(2):80-83. | |
| [2] | 马朝骥, 冯雯雯, 庞佑兵, 等. 一种有刷直流电机驱动器的设计[J]. 微电子学, 2019, 49(3):351-355. |
| Ma Zhaoji, Feng Wenwen, Pang Youbing, et al. Design of a brushed DC motor driver[J]. Microelectronics, 2019, 49(3):351-355. | |
| [3] | 胡磊, 林示麟, 徐建明, 等. S曲线加减速速度控制新方法[J]. 组合机床与自动化加工技术, 2010, 12(1):22-26. |
| Hu Lei, Lin Shilin, Xu Jianming, et al. A new speed control algorithm S curve acceleration deceleration[J]. Modular Machine Tool and Automatic Manufacturing Technique, 2010, 12(1):22-26. | |
| [4] | 杨九林, 朱建公, 廖璇, 等. 直流无刷电机S曲线加减速控制算法及其实现[J]. 机床与液压, 2020, 48(23):160-165. |
| Yang Jiulin, Zhu Jiangong, Liao Xuan, et al. S-curve acceleration and deceleration control algorithm for DC brushless motor and its implementation[J]. Machine Tool and Hydraulics, 2020, 48(23):160-165. | |
| [5] | 林松森. 自动化立体仓库堆垛机运行过程控制方法的研究[D]. 武汉: 武汉理工大学, 2017:42-50. |
| Lin Songsen. Research on the running process control method of the stacker in automated warehouse[D]. Wuhan: Wuhan University of Technology, 2017:42-50. | |
| [6] | 普江华, 王学军, 吴鹏, 等. 基于接触的轨道运输车升降系统传动结构稳定性分析[J]. 电子科技, 2021, 34(2):45-51. |
| Pu Jianghua, Wang Xuejun, Wu Peng, et al. Stability analysis of transmission structure of rail transport conveyor lifting subsystem based on contact[J]. Electronic Science and Technology, 2021, 34(2):45-51. | |
| [7] | Zhu X, Fei Q Q, Zhu Q X. On an improved sinusoidal square curve acceleration and deceleration algorithms in motion control[C]. Shanghai: International Conferenceon Information Science and Control Engineering, 2019:309-316. |
| [8] | 周黎, 杨世洪, 高晓东. 步进电机控制系统建模及运行曲线仿真[J]. 电机与控制学报, 2011, 15(1):20-25. |
| Zhou Li, Yang Shihong, Gao Xiaodong. Modeling of stepper motor control system and running curve simulation[J]. Electric Machines and Control, 2011, 15(1):20-25. | |
| [9] | 蔡娜, 秦刚, 张和铭, 等. 步进电机速度控制技术研究[J]. 电子测量技术, 2021, 44(15):84-88. |
| Cai Na, Qin Gang, Zhang Heming, et al. Research on speed control technology of stepper motor[J]. Electronic Measurement Technique, 2021, 44(15):84-88. | |
| [10] | 许哲, 朱海洋, 王庆诚. 基于S型速度曲线的机器人连续多轨迹规划[J]. 机械设计与研究, 2021, 37(6):59-65. |
| Xu Zhe, Zhu Haiyang, Wang Qingcheng. Continuous multipath trajectory planning of robot based on S-curve velocity[J]. Machine Design and Research, 2021, 37(6):59-65. | |
| [11] | 郑灵霞, 尧辉明. 基于波磨磨耗定量的地铁小半径曲线轮轨仿真[J]. 电子科技, 2020, 33(9):69-74. |
| Zheng Lingxia, Yao Huiming. Simulation of metro curved rail corrugation based on wear quantification[J]. Electronic Science and Technology, 2020, 33(9):69-74. | |
| [12] | 曾康玲, 杨向宇, 赵世伟, 等. 步进电机指数型加速曲线优化与实现[J]. 微电机, 2014, 47(6):36-40. |
| Zeng Kangling, Yang Xiangyu, Zhao Shiwei, et al. Optimization of exponential acceleration curve of stepper motor and realization on PIC[J]. Micromotors, 2014, 47(6):36-40. | |
| [13] | 李振娜, 王涛, 王斌锐, 等. 基于带约束S型速度曲线的机械手笛卡尔空间轨迹规划[J]. 智能系统学报, 2019, 14(4):655-661. |
| Li Zhenna, Wang Tao, Wang Binrui, et al. Trajectory planning for manipulator in Cartesian space based on constrained S-curve velocity[J]. CAAI Transactions on Intelligent Systems, 2019, 14(4):655-661. | |
| [14] | 王邦继, 刘庆想, 周磊, 等. 步进电机控制系统建模及加减速曲线优化[J]. 电机与控制学报, 2018, 22(1):37-42. |
| Wang Bangji, Liu Qingxiang, Zhou Lei, et al. Modeling of stepper motor control system and optimization of acceleration and deceleration curve[J]. Electric Machines and Control, 2018, 22(1):37-42. | |
| [15] | Fang S X, Cao J G, Zhang Z Y, et al. Study on high-speed and smooth transfer of robot motion trajectory based on modified S-shaped acceleration/deceleration algorithm[J]. IEEE Access, 2020(8):199747-199758. |
| [16] | 冯高明, 金明磊. 售货机直流电机升降系统控制策略研究[J]. 河南理工大学学报(自然科学版), 2022, 41(6):137-144. |
| Feng Gaoming, Jin Minglei. Study on control strategy of DC motor lifting system of vending machine[J]. Journal of Henan Polytechnic University(Natural Science), 2022, 41(6):137-144. | |
| [17] | 孙海峰, 胡海峰, 宋征宇, 等. 基于指数曲线的运载火箭推力调节电机速度控制方法[J]. 航天控制, 2018, 36(1):55-59. |
| Sun Haifeng, Hu Haifeng, Song Zhengyu, et al. Speed control method for thrust regulation motor of launch vehicle base on exponential curve[J]. Aerospace Control, 2018, 36(1):55-59. | |
| [18] | 许德智, 黄泊珉, 杨玮林. 神经网络自适应的永磁直线同步电机超扭曲终端滑模控制[J]. 电力系统保护与控制, 2021, 49(13):64-71. |
| Xu Dezhi, Huang Bomin, Yang Weilin. Neural network adaptive super twist terminal sliding mode control for a permanent magnet linear synchronous motor[J]. Power System Protection and Control, 2021, 49(13):64-71. | |
| [19] | 张道义, 伞红军, 陈久朋, 等. 5-DOF混联雕刻机速度运动学分析及仿真[J]. 电子科技, 2020, 33(4):42-49. |
| Zhang Daoyi, San Hongjun, Chen Jiupeng, et al. Velocity kinematics analysis and simulation of 5-DOF hybrid engraving machine[J]. Electronic Science and Technology, 2020, 33(4):42-49. | |
| [20] | 刘尧, 胡博, 张辉, 等. 数控机床上下料机器人运动控制轨迹优化研究[J]. 测控技术, 2021, 40(6):32-38. |
| Liu Yao, Hu Bo, Zhang Hui, et al. Motion control trajectory optimization of loading and unloading robot for CNC machine tool[J]. Measurement and Control Technology, 2021, 40(6):32-38. |
| [1] | ZHU Jiawen,CHEN Zhuo,LIU Renzhi,LIU Bolin,CHEN Xiangping. Integrated Control Strategy of Wind Turbine Inertia Support and Primary Frequency Regulation [J]. Electronic Science and Technology, 2023, 36(5): 9-15. |
| [2] | ZENG Guang,YANG Jian,SONG Ruigang. Control Strategy of Supercapacitor Based on Train Braking Energy Recovery [J]. Electronic Science and Technology, 2022, 35(5): 74-80. |
| [3] | LIU Jianlong,HAO Zhenghang. Comparative Study of Wind Power System Simulation Based on Back-to-Back Converters [J]. Electronic Science and Technology, 2022, 35(2): 67-73. |
| [4] | PU Jianghua,WANG Xuejun,WU Peng,CHEN Mingfang,YANG Xiong. Stability Analysis of Transmission Structure of Rail Transport Conveyor Lifting Subsystem Based on Contact [J]. Electronic Science and Technology, 2021, 34(2): 45-51. |
| [5] | HUANG Peng,ZHENG Yuejiu,GAO Han,LAI Xin. Design of A Composite Equalization System for Lithium-ion Battery Modules [J]. Electronic Science and Technology, 2020, 33(6): 40-45. |
| [6] | SHI Xun,YI Yingping,WANG Xiaoli. Research on Flux Weakening Control Technology of Interior Permanent Magnet Synchronous Motor [J]. Electronic Science and Technology, 2020, 33(2): 14-19. |
| [7] | XING Yuhang. Virtual Design and Verification of Lightweight Automotive Parts by Hot Pressing [J]. Electronic Science and Technology, 2020, 33(10): 64-66. |
| [8] | ZHOU Ping,GAO Han,ZHENG Yuejiu,LAI Xin,ZHOU Long. An Active Equalization Method for Lithium-ion Battery Pack Based on Additional Battery [J]. Electronic Science and Technology, 2019, 32(6): 37-42. |
| [9] | CHEN Yunpeng,MAI Yunfei. Modeling and Simulation of Mechanical Steering Gear Impact Tester [J]. , 2017, 30(9): 122-. |
| [10] | WANG Bangting,HUANG Yaoda. Electric Loading System Based on a Novel CMAC Control Strategy [J]. , 2015, 28(9): 136-. |
| [11] | JIN Aijuan,XU Dazhuang,CHEN Yi,MA Zhongxue,ZHAO Panpan. Delayed Feedback Control in the Parallel-Connected Boost Converters [J]. , 2015, 28(11): 78-. |
| [12] | LIU Zhong,WU Jialong,LI Kun. Design and Implementation of a Vending Machine Based on FSM [J]. , 2014, 27(11): 59-. |
| [13] | GUAN Bolin. The Tracking System of Vehicular Three-Axis Photoelectric Based on Hybrid Optimization [J]. , 2014, 27(10): 150-. |
| [14] | WANG Yuye,XIANG Wei. Direct Power Control Strategy for Inverters of Wind Power Generation System [J]. , 2014, 27(10): 192-. |
| [15] | FENG Chenggong. Environmental Impact of Offshore Oil Platforms Scattering Communication Station Electromagnetic Radiation [J]. , 2013, 26(7): 122-. |
|
||
