Electronic Science and Technology ›› 2019, Vol. 32 ›› Issue (7): 65-70.doi: 10.16180/j.cnki.issn1007-7820.2019.07.013
Previous Articles Next Articles
MAO Chenyue,WU Pengyong
Received:2018-10-26
Online:2019-07-15
Published:2019-08-14
CLC Number:
MAO Chenyue,WU Pengyong. UAV Path Planning Obstacle Avoidance Algorithm Based on Artificial Potential Field Method[J].Electronic Science and Technology, 2019, 32(7): 65-70.
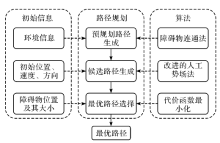
Figure 1.
Flow chart of improved algorithm"
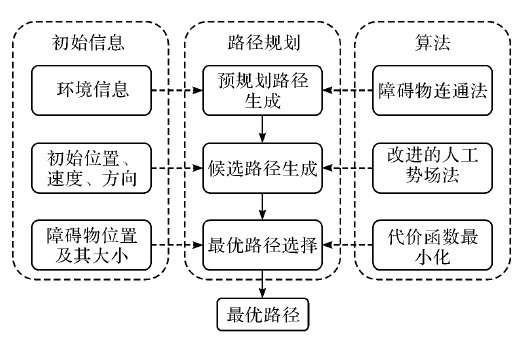
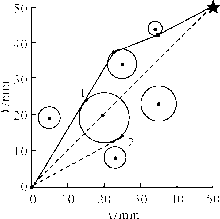
Figure 2.
Pre planning path"
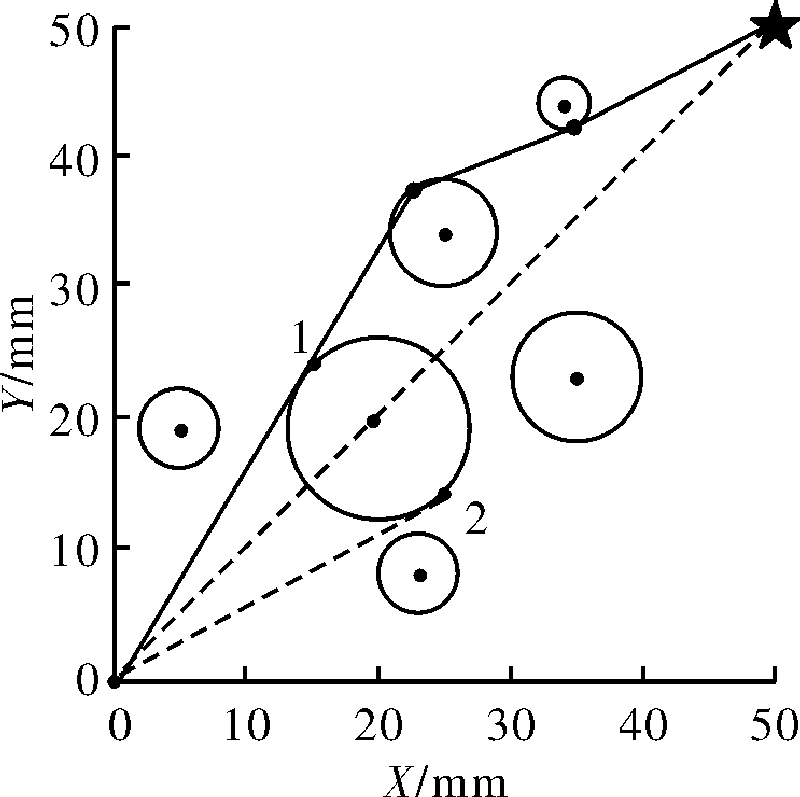
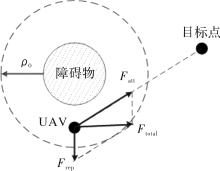
Figure 3.
UAV’s force in artificial potential field"
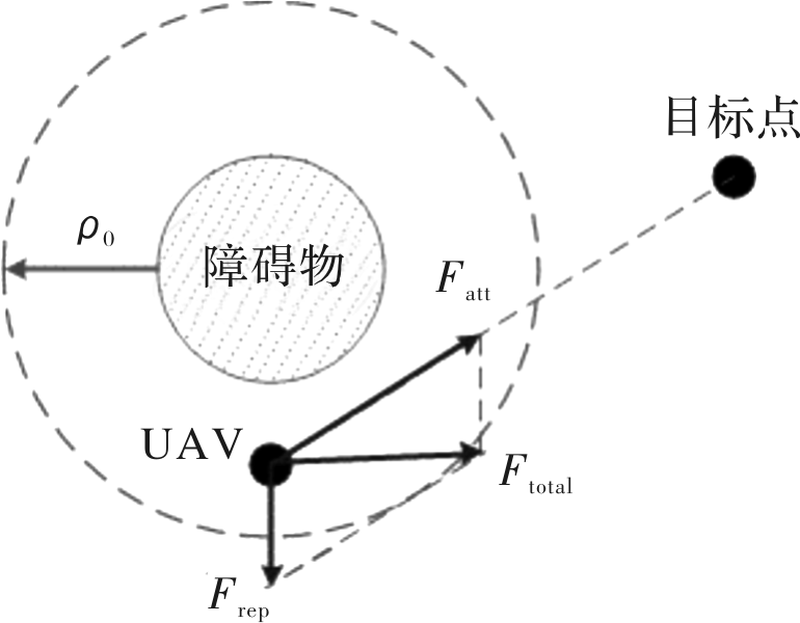

Figure 4.
Schematic diagram of potential region"
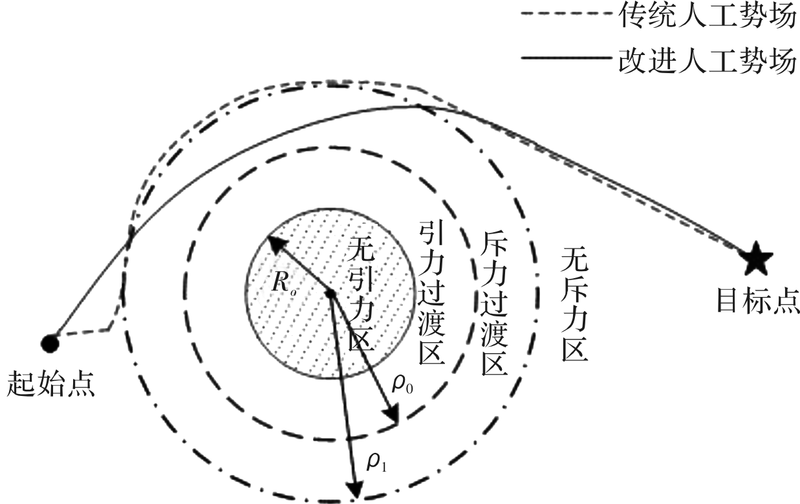
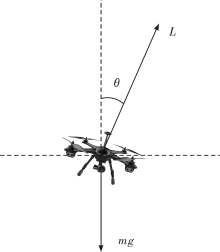
Figure 5.
Force analysis diagram for UAV deflecting"
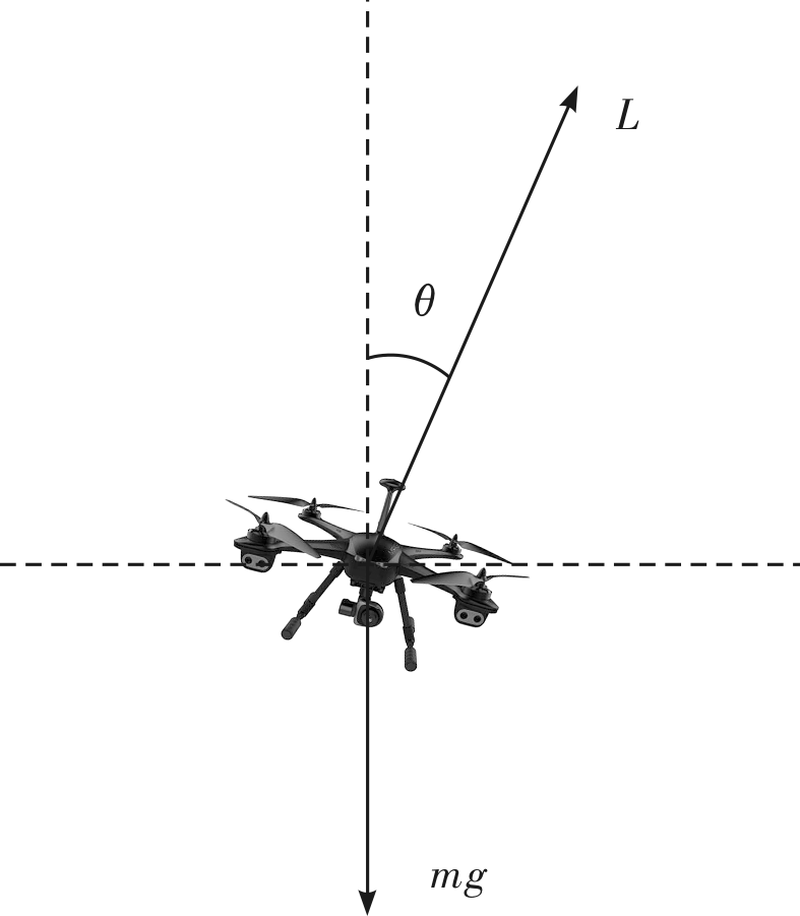
Figure 6.
Obstacle avoidance paths with different repulsive coefficients"
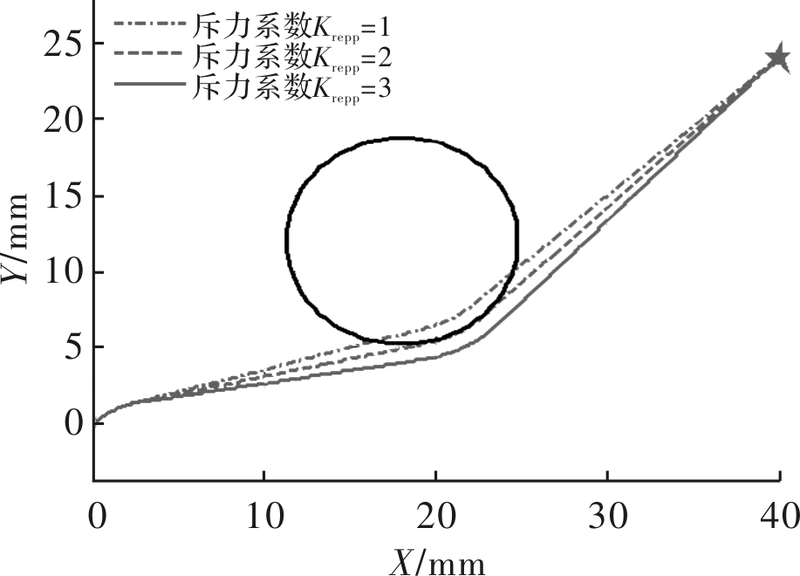
Table 1
Obstacle information"
| 障碍物名称 | 位置/m | 半径/m |
|---|---|---|
| 障碍物1 | (5,19) | 3 |
| 障碍物2 | (20,20) | 7 |
| 障碍物3 | (23,8) | 3 |
| 障碍物4 | (25,34) | 4 |
| 障碍物5 | (34,44) | 2 |
| 障碍物6 | (35,23) | 5 |

Figure 7.
Document [17], document [18] and the improved artificial potential field method for path planning simulation"
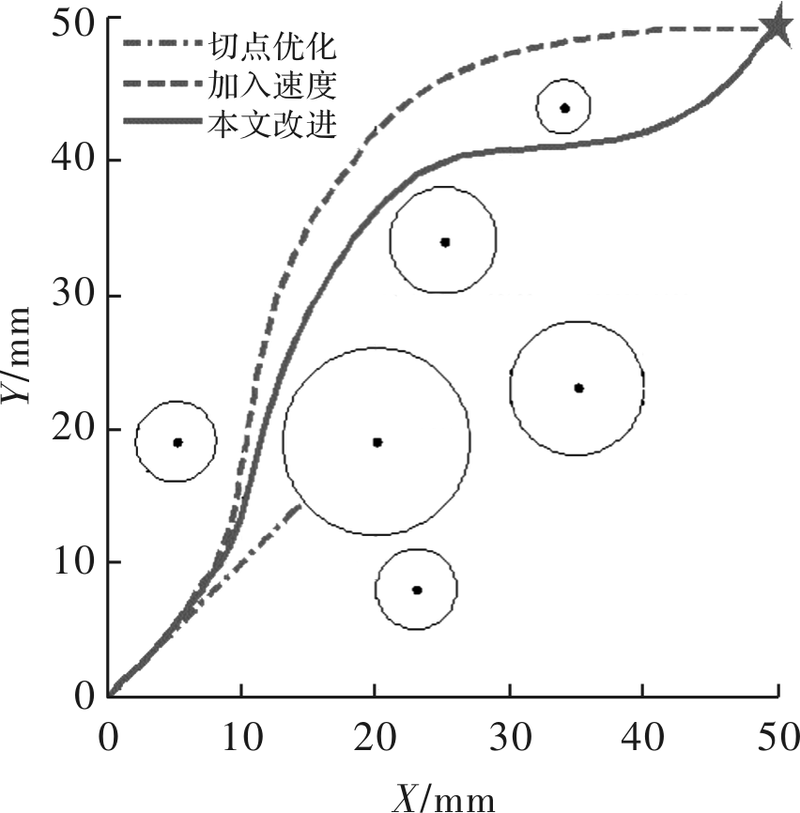
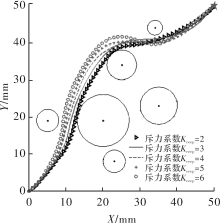
Figure 8.
Candidate path simulation for improved artificial potential field method"
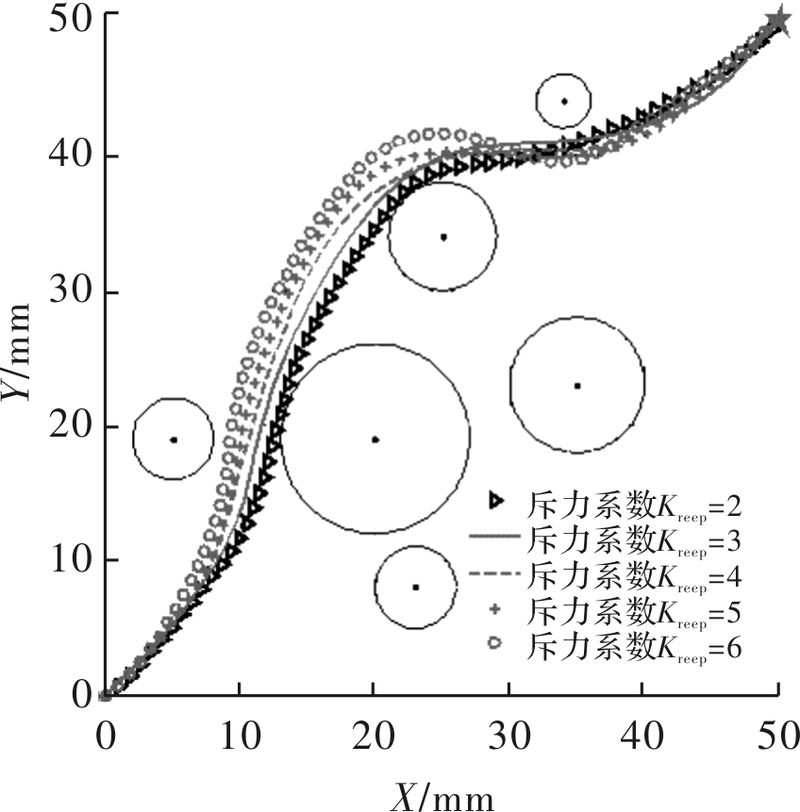
Table 2
Path cost comparison of 3 algorithms"
| 势场系数Krepp | fsaf/m-1 | fsmo/m-1 | fene/J |
|---|---|---|---|
| Krepp=2 | 7.236 | 0.015 1 | 917.2 |
| Krepp=3 | 0.588 | 0.025 6 | 911.5 |
| Krepp=4 | 0.339 | 0.316 0 | 943.5 |
| Krepp=5 | 0.222 | 0.038 4 | 988.1 |
| Krepp=6 | 0.156 | 0.049 9 | 1 027.2 |
Table 3
Comparison of [17], [18] and flight path cost function indices of different algorithms in different flight environments"
| 障碍物个数 | 基于切点优化的算法 | 加入速度因素的算法 | 本文提出的改进算法 | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 3749.9 | 0.533 | 0.126 | 12518 | 0.352 | 0.0118 | 818.1 | 0.560 | 0.0192 | |||||||
| 6 | 0.671 | 0.539 | 12862 | 0.393 | 0.0213 | 977.9 | 0.588 | 0.0256 | 911.5 | ||||||
| 9 | 0.773 | 0.398 | 12899 | 0.385 | 0.0172 | 1164.9 | 0.532 | 0.0264 | 1043.8 | ||||||
| 12 | 0.562 | 0.413 | 13010 | 0.435 | 0.0140 | 1325.1 | 0.715 | 0.0283 | 1281.4 | ||||||
| 15 | 0.575 | 0.529 | 13306 | 0.455 | 0.0162 | 1435.1 | 0.832 | 0.0319 | 1328.2 | ||||||
| [1] | Pham H, Smolka S A, Stoller S D , et al. A survey on unmanned aerial vehicle collision avoidance systems[M]. Cleveland:arXiv Preprint, 2015. |
| [2] | Liu Z, Yuan C, Yu X , et al. Fault-tolerant formation control of unmanned aerial vehicles in the presence of actuator faults and obstacles[J]. Unmanned Systems, 2016,4(3):197-211. |
| [3] | Lin Y, Saripalli S . Sampling-based path planning for UAV collision avoidance[J].IEEE Transactions on Intelligent Transportation Systems, 2017(99):1-14. |
| [4] | 周明秀, 程科, 汪正霞 . 动态路径规划中的改进蚁群算法[J]. 计算机科学, 2013,40(1):314-316. |
| Zhou Mingxiu, Cheng Ke, Wang Zhengxia . Improved ant colony algorithm in dynamic path planning[J]. Computer Science, 2013,40(1):314-316. | |
| [5] | 罗元, 邵帅, 张毅 . 基于信息融合的移动机器人定位与路径规划[J]. 计算机应用, 2010,30(11):3091-3093. |
| Luo Yuan, Shao Shuai, Zhang Yi . Location and path planning of mobile robots based on information fusion[J]. Computer Applications, 2010,30(11):3091-3093. | |
| [6] | Zhang S, Deng W, Zhao Q, et al. Dynamic trajectory planning for vehicle autonomous driving [C].Pittsburgh:IEEE International Conference on Systems, Man and Cybernetics,IEEE Computer Society, 2013. |
| [7] | 陈智 . 基于栅格法多目标路径规划研究[D]. 武汉:华中科技大学, 2015. |
| Chen Zhi . Research on multi-objective path planning based on grid method[D]. Wuhan:Huazhong University of Science and Technology, 2015. | |
| [8] | Silva J B B, Siebra C A, Nascimento T P D . A new cost function heuristic applied to A* based path planning in static and dynamic environments [C].Arlington:Latin American Robotics Symposium,IEEE, 2016. |
| [9] | 沈永增, 陈瑞, 黄海港 . 基于遗传神经网络的车辆导航路径规划[J]. 计算机系统应用, 2013,22(8):210-213. |
| Shen Yongzeng, Chen Rui, Huang Haigang . Vehicle navigation path planning based on genetic neural network[J]. Computer System Applications, 2013,22(8):210-213. | |
| [10] | Zhang X, Duan H, Yang C. Pigeon-inspired optimization approach to multiple UAVs formation reconfiguration controller design [C].Wichita:Proceedings of 2014 IEEE Chinese Guidance,Navigation and Control Conference, 2014. |
| [11] | 于振中, 闫继宏, 赵杰 , 等. 改进人工势场法的移动机器人路径规划[J]. 哈尔滨工业大学学报, 2011,43(1):50-55. |
| Yu Zhenzhong, Yan Jihong, Zhao Jie , et al. Modified artificial potential field method for mobile robot path planning[J]. Journal of Harbin Institute of Technology, 2011,43(1):50-55. | |
| [12] | Chang K, Xia Y, Huang K . UAV formation control design with obstacle avoidance in dynamic three-dimensional environment[J]. Springer Plus, 2016,5(1):1124-1138. |
| [13] | Henrotte F, Hameyer K, Sande H V . The Newton‐raphson method for solving non‐linear and anisotropic time‐harmonic problems[J]. Compel International Journal of Computations & Mathematics in Electrical, 2004,23(4):950-958. |
| [14] | Khatib O . Real time obstacle avoidance for manipulation and mobile robots[J]. International Journal robotics Research, 1986,5(1):90-98. |
| [15] | 丁家如, 杜昌平, 赵耀 , 等. 基于改进人工势场法的无人机路径规划算法[J]. 计算机应用, 2016,36(1):287-290. |
| Ding Jiaru, Du Changping, Zhao Yao , et al. UAV path planning algorithm based on improved artificial potential field[J]. Computer Application, 2016,36(1):287-290. | |
| [16] | 余超凡 . 基于改进人工势场法的旋翼飞行器的避障研究[D]. 杭州:浙江工业大学, 2017. |
| Yu Chaofan . Obstacle avoidance of rotor aircraft based on improved artificial potential field method[D]. Hangzhou:Zhejiang University of Technology, 2017. | |
| [17] | 彭艳, 国文青, 刘梅 , 等. 基于切点优化人工势场法的三维避障规划[J]. 系统仿真学报, 2014,26(8):1758-1762. |
| Peng Yan, Guo Wenqing, Liu Mei , et al. Three-dimensional obstacle avoidance planning based on tangent point optimization artificial potential field method[J]. Journal of System Simulation, 2014,26(8):1758-1762. | |
| [18] | 徐腾飞, 罗琦, 王海 . 基于向量场的移动机器人动态路径规划[J]. 计算机科学, 2015,42(5):237-244. |
| Xu Tengfei, Luo Qi, Wang Hai . Dynamic path planning for mobile robots based on vector field[J]. Computer Science, 2015,42(5):237-244. |
| [1] | YE Hengchao,CHENG Zongmao. Research on Charging Method of Sensor Network Based on Relay Multi-Hop Model [J]. Electronic Science and Technology, 2021, 34(8): 31-36. |
| [2] | SHUI Jiusheng,WANG Ran. A On-Demand Multi-Node Priority Charging Scheduling Algorithm [J]. Electronic Science and Technology, 2021, 34(8): 43-49. |
| [3] | LIU Yongjian,ZENG Guohui,HUANG Bo,LI Xiaobin. Research on Robot Path Planning Based on Improved Ant Colony Algorithm [J]. Electronic Science and Technology, 2020, 33(1): 13-18. |
| [4] | LIU Xuefang,ZENG Guohui,HUANG Bo,LU Dunke. Research on Path Planning of Mobile Robot Based on Improved Ant Colony Algorithm [J]. Electronic Science and Technology, 2019, 32(9): 5-9. |
| [5] | HU Huimian. An Improved Path Planning Algorithm With Variable Probability Bidirectional RRT [J]. Electronic Science and Technology, 2019, 32(6): 16-21. |
| [6] | ZHAO Wei,ZENG Guohui,HUANG Bo,ZHU Shuangxin,LIU Jin. 3D Space Path Planning Research Based on Improved Local Search Algorithm [J]. Electronic Science and Technology, 2019, 32(6): 58-63. |
| [7] | YUE Xiu,ZHANG Wei. UAV Path Planning Based on Intelligent Algorithm [J]. Electronic Science and Technology, 2019, 32(2): 9-13. |
| [8] | XIA Lingru,SUN Shouqun. Planning Route for UAV Cooperative Combat [J]. , 2018, 31(1): 4-. |
| [9] | WANG Zhilong,SHEN Jingfeng. Based on The Regional Coverage of Cleaning Robot Path Planning [J]. , 2017, 30(9): 68-. |
| [10] | ZHANG Chen, YOU Xiaoming. Improved Quantum ant Colony Algorithm of Path Planning for Mobile Robot Based on Grid Model [J]. , 2016, 29(7): 1-. |
| [11] | XIE Yunhong,ZHANG Jumei,XIANG Yang. Key Technology for a Real Time Traffic System Based on the Mobile Internet [J]. , 2015, 28(5): 118-. |
| [12] | RONG Shaowei. Research of Underwater Autonomous Search Path Planning Based on Improved A* Algorithm [J]. , 2015, 28(4): 17-. |
| [13] | PAN Xiang,TANG Chunhui,ZHANG Renjie. Path Planning of Mobile Robot Based on Shuffled Frog Leaping Algorithm [J]. , 2015, 27(11): 29-. |
| [14] | PAN Xiang,TANG Chunhui,ZHANG Renjie. Path Planning of Mobile Robot Based on Shuffled Frog Leaping Algorithm [J]. , 2015, 28(11): 29-. |
| [15] | YANG Lu. Research on Zigbee Routing Protocol Algorithm [J]. , 2014, 27(3): 12-. |
|
