Electronic Science and Technology ›› 2021, Vol. 34 ›› Issue (9): 66-72.doi: 10.16180/j.cnki.issn1007-7820.2021.09.012
Previous Articles Next Articles
ZHAO Chong1,CHI Mengmeng2,CHU Cong3,ZHANG Peng2
Received:2020-05-12
Online:2021-09-15
Published:2021-09-08
Supported by:CLC Number:
ZHAO Chong,CHI Mengmeng,CHU Cong,ZHANG Peng. Research on Motion Simulation and Visual Recognition Algorithm of Guide Dog Walking Mechanism[J].Electronic Science and Technology, 2021, 34(9): 66-72.
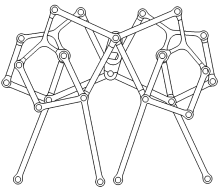
Figure 1.
Jansen walking mechanism"
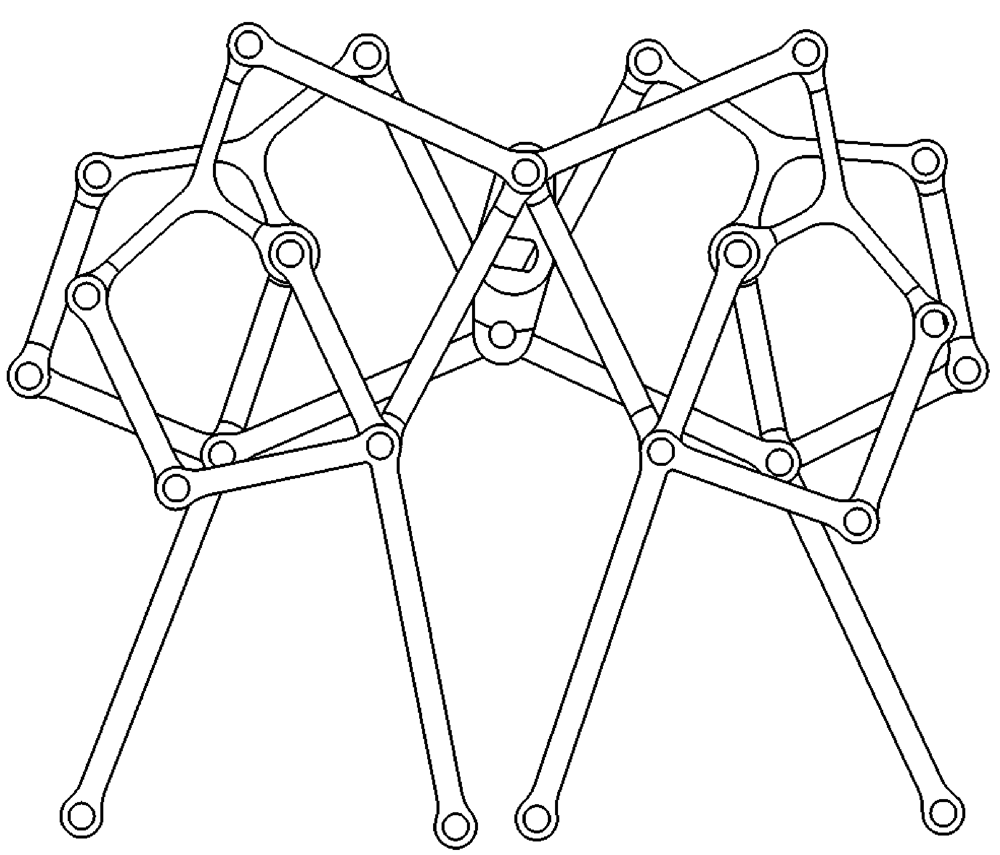
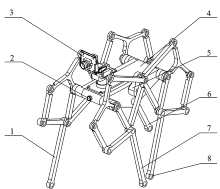
Figure 2.
Guide dog body"

Table1
Motion simulation parameters setting of walking mechanism"
| 参数 | 取值 |
|---|---|
| 固定位置 | 导盲犬机体 |
| 电机输出转速 | 0.1 rad·s-1 |
| 运行时间 | 10 s |
| 数据采集点 | 行走机构四肢末端 |
| 输出数据结果 | 相对于地面的高度 |
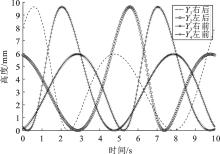
Figure 3.
Simulation data curve of the normal displacement of the limbs of the guide dog relative to the ground"
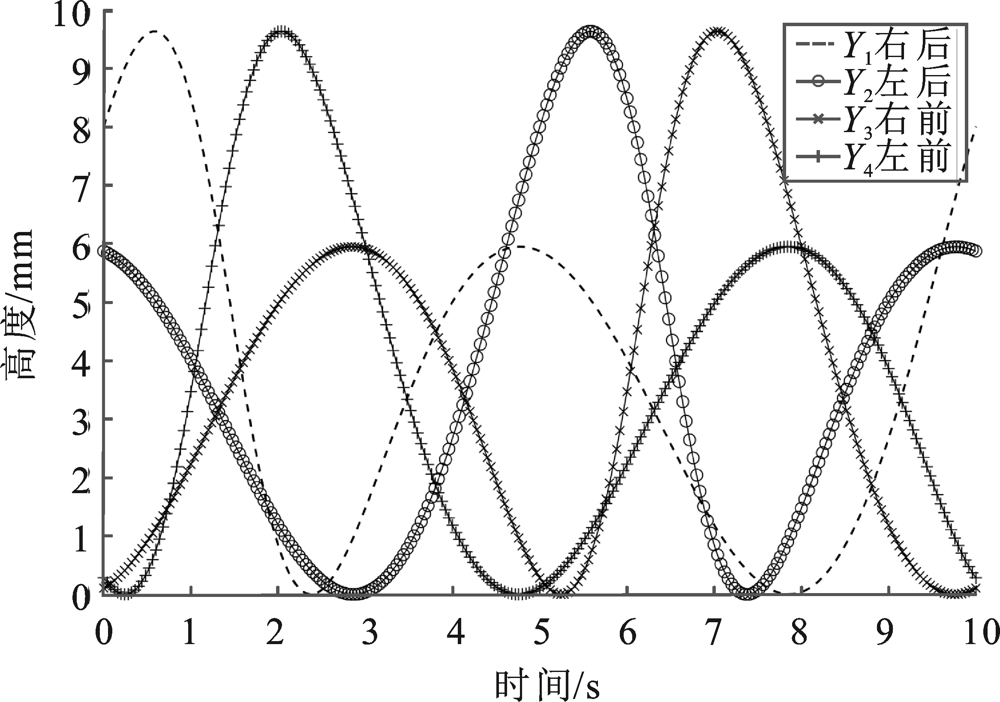

Figure 4.
Part of the dataset"

Table 2
Parameters of the dataset"
| 测试对象 | 红灯、绿灯 |
|---|---|
| 样本数量/张 | 493 |
| 训练集数量/张 | 318 |
| 验证集数量/张 | 75 |
| 测试集数量/张 | 100 |
| 样本尺寸/像素 | 416×416 |
Figure 5.
Relationship between the number of anchor boxes and average IOU"
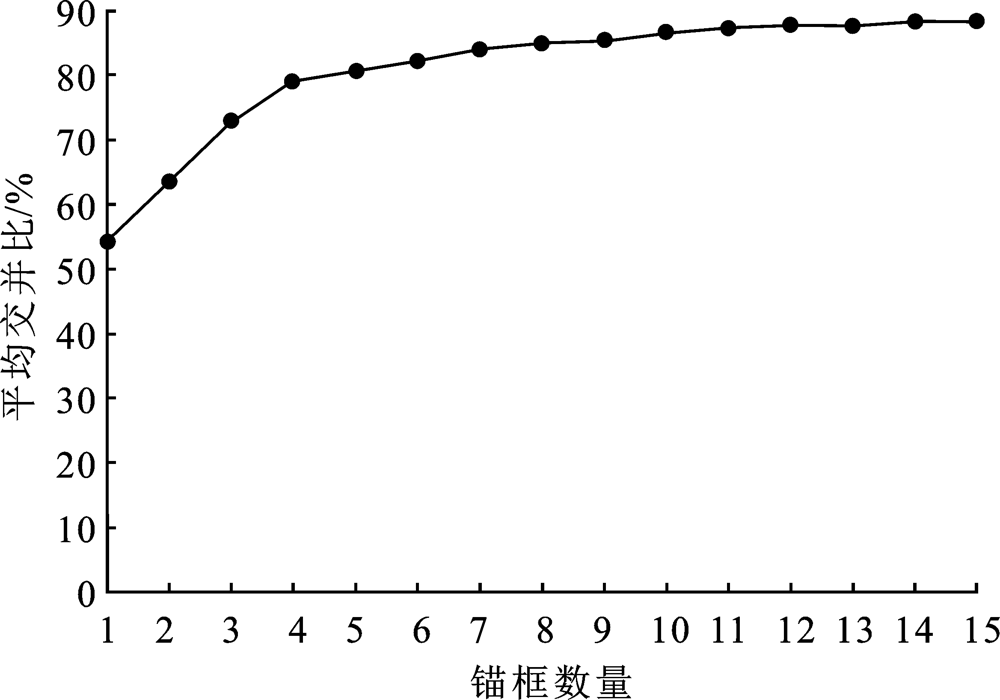
Figure 6.
Anchor box size comparison (a)Prior box size (b)Anchor box size after optimization"
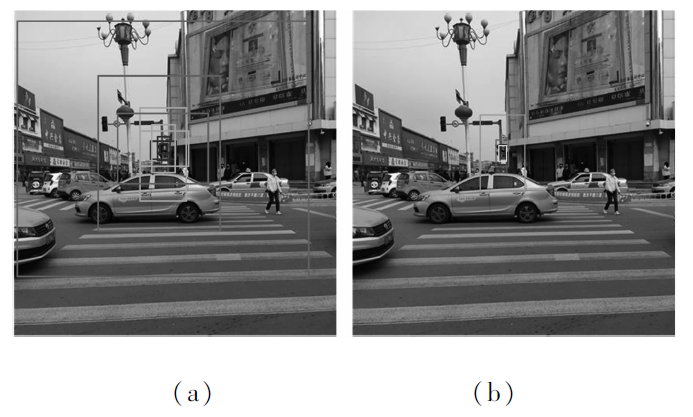
Table 3
YOLO v3 training parameters"
| 参数 | 取值 |
|---|---|
| 动量 | 0.9 |
| 学习率 | 0.001 |
| Batch | 64 |
| Subdivision | 32 |
| 迭代次数 | 7 500 |
Figure 7.
Loss function of the model"
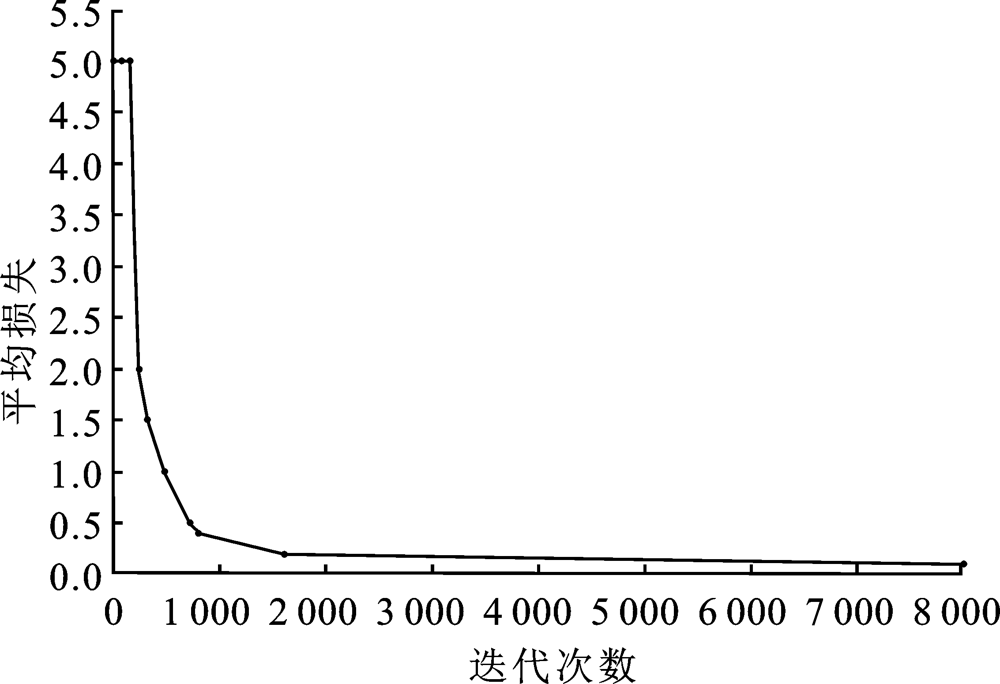
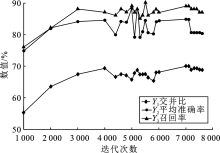
Figure 8.
Performance comparison of models with different iterations"
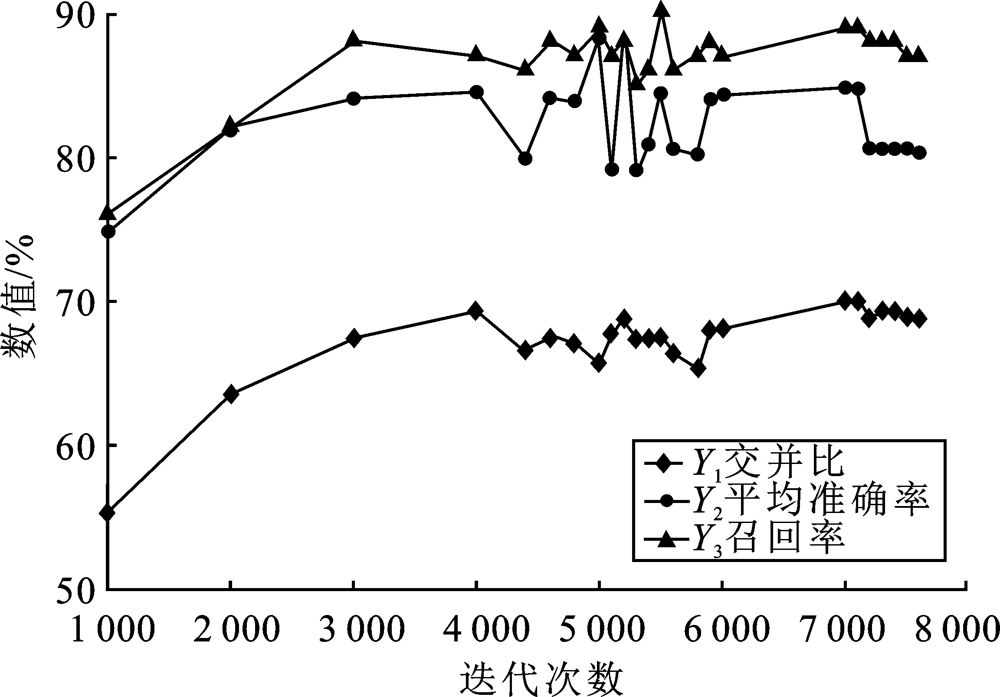
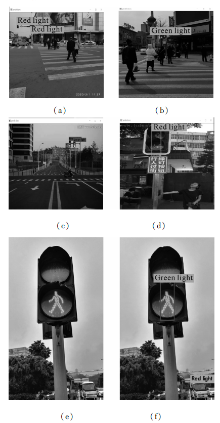
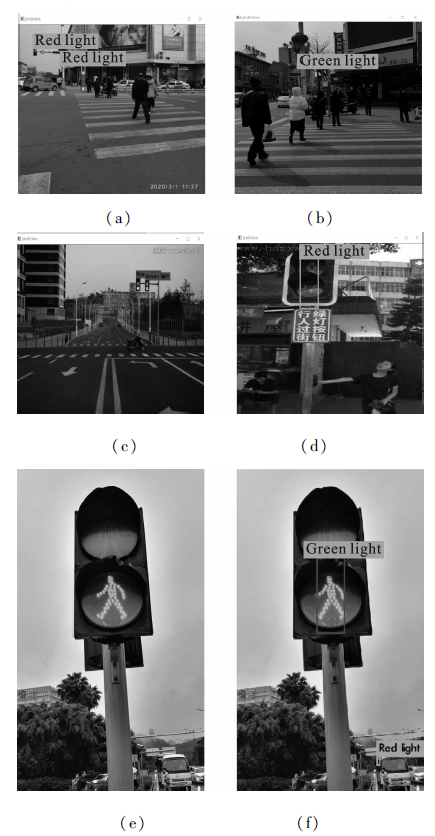
Figure 9.
Model detection effects after training (a) Red light prediction result of self-built data set (b) Green light prediction result of self-built data set (c) Green light prediction results of images of other scenes (d) Red light prediction results of images of other scenes (e) Image of self-built data set to be checked (f) Examples of self-built data sets with false predictions"
| [1] | 王国彪, 陈殿生, 陈科位, 等. 仿生机器人研究现状与发展趋势[J]. 机械工程学报, 2015, 51(13):27-44. |
| Wang Guobiao, Chen Diansheng, Chen Kewei, et al. The current research status and development strategy on biomimetic robot[J]. Journal of Mechanical Engineering, 2015, 51(13):27-44. | |
| [2] | 曾婧婧, 杨平, 徐春梅, 等. 机器导盲犬的设计与实现[J]. 机电一体化, 2005, 11(4):22-25. |
| Zeng Jingjing, Yang Ping, Xu Chunmei, et al. Design and implementation of a robot guide dog[J]. Mechatronics, 2005, 11(4):22-25. | |
| [3] | 花良浩, 杨润贤. 基于双控制技术的智能机器导盲犬的设计与实现[J]. 太原城市职业技术学院学报, 2015(11):194-196. |
| Hua Lianghao, Yang Runxian. Design and implementation of intelligent robot guide dog based on dual control technology[J]. Journal of Taiyuan Urban Vocational College, 2015(11):194-196. | |
| [4] | 谢济励. 基于IDEO方法的机器导盲犬开发设计流程[J]. 科技创新与生产力, 2017(1):82-84. |
| Xie Jili. Development and design process of machine guide dog based on IDEO method[J]. Sci-tech Innovation and Productivity, 2017(1):82-84. | |
| [5] | 雷静桃, 张悦文, 饶进军. 四足机器人刚柔耦合仿生脊柱研究进展[J]. 科技导报, 2020, 38(2):35-49. |
| Lei Jingtao, Zhang Yuewen, Rao Jinjun. Research progress of rigid-flexible coupling bionic spine of quadruped robot[J]. Science & Technology Review, 2020, 38(2):35-49. | |
| [6] | 陈阳, 徐晓丹, 李向攀. 基于Arduino控制的气动软体仿生四足机器人结构设计及步态规划[J]. 液压与气动, 2020(5):86-90. |
| Chen Yang, Xu Xiaodan, Li Xiangpan. Structural design and gait planning of pneumatic soft bionic quadruped robot based on arduino control[J]. Chinese Hydraulics & Pneumatics, 2020(5):86-90. | |
| [7] | 李潮, 崔承勋. 四足仿生机器人的设计[J]. 南方农机, 2020, 51(7):37-40. |
| Li Chao, Cui Chengxun. The design of a bionic four-legged robot[J]. China Southern Agricultural Machinery, 2020, 51(7):37-40. | |
| [8] | 赵涓涓, 李强, 任美荣. 六足仿生机器人运动控制系统的设计[J]. 机电工程技术, 2008, 37(12):44-45. |
| Zhao Juanjuan, Li Qiang, Ren Meirong. Design for motorial control system of hexapod robot[J]. Mechanical & Electrical Engineering Technology, 2008, 37(12):44-45. | |
| [9] | 单东升, 何亚磊. 一种六足军用机器人行走机构的设计与优化[J]. 装甲兵工程学院学报, 2018, 32(3):72-76. |
| Shan Dongsheng, He Yalei. Design and optimization of hexapod walking mechanism for military robot[J]. Journal of Academy of Armored Force Engineering, 2018, 32(3):72-76. | |
| [10] | 臧红彬, 沈连婠. Theo Jansen仿生腿研究及其机构优化设计[J]. 机械工程学报, 2017, 53(15):101-109. |
| Zang Hongbin, Shen Lianguan. Research and optimization design of mechanism for Theo Jansen bionic leg[J]. Journal of Mechanical Engineering, 2017, 53(15):101-109. | |
| [11] | 马宏平, 蒋励, 宋竹青, 等. 多方向红外测距新型智能导盲杖[J]. 光学仪器, 2012, 34(5):84-88. |
| Ma Hongping, Jiang Li, Song Zhuqing, et al. Study on a new type of intelligent blind-guiding stick[J]. Optical Instruments, 2012, 34(5):84-88. | |
| [12] | 孟祥薇, 严锡君, 欧阳星辰, 等. 基于超声波传感器的导盲杖设计[J]. 电子设计工程, 2012, 20(17):11-14. |
| Meng Xiangwei, Yan Xijun, Ouyang Xingchen, et al. Design of blind guiding crutch based on ultrasonic sensor[J]. Electronic Design Engineering, 2012, 20(17):11-14. | |
| [13] | 张长青, 杨楠. 一种面向交通标志识别系统的图像识别算法[J]. 电子科技, 2019, 32(7):60-64. |
| Zhang Changqing, Yang Nan. An image recognition algorithm for traffic sign recognition system[J]. Electronic Science and Technology, 2019, 32(7):60-64. | |
| [14] | 张达峰, 刘宇红, 张荣芬. 基于深度学习的智能辅助驾驶系统[J]. 电子科技, 2018, 31(10):60-63. |
| Zhang Dafeng, Liu Yuhong, Zhang Rongfen. Intelligent assistant driving system based on deep leaning[J]. Electronic Science and Technology, 2018, 31(10):60-63. | |
| [15] | Redmon J, Divvala S, Girshick R, et al. You only look once: unified, real-time object detection[C]. Seattle:IEEE Conference on Conputer Vision and Pattern Recognition, 2016. |
| [16] | Redmon J, Farhadi A. YOLO9000:Better,Faster,Stronger[C]. Honolulu:The Thirtieth International IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2017. |
| [17] | 叶飞, 刘子龙. 基于改进YOLOV3算法的行人检测研究[J]. 电子科技, 2021, 34(1):5-9. |
| Ye Fei, Liu Zilong. Pelestrian detection based on improved YOLOV3 algorithm[J]. Electronic Science and Technology, 2021, 34(1):5-9. | |
| [18] | 袁小平, 王岗, 王晔枫, 等. 基于改进卷积神经网络的交通标志识别方法[J]. 电子科技, 2019, 32(11):28-32. |
| Yuan Xiaoping, Wang Gang, Wang Yefeng, et al. Traffic sign recognition method based on improved convolutional neural network[J]. Electronic Science and Technology, 2019, 32(11):28-32. | |
| [19] | 吕铄, 蔡烜, 冯瑞. 基于改进损失函数的YOLOv3网络[J]. 计算机系统应用, 2019, 28(2):1-7. |
| Lü Shuo, Cai Xuan, Feng Rui. YOLOv3 network based on improved loss function[J]. Computer Systems & Applications, 2019, 28(2):1-7. | |
| [20] | 李珣, 刘瑶, 李鹏飞, 等. 基于Darknet框架下YOLO v2算法的车辆多目标检测方法[J]. 交通运输工程学报, 2018, 18(6):142-158. |
| Li Xun, Liu Yao, Li Pengfei, et al. Vehicle multi-target detection method based on YOLO v2 algorithm under darknet framework[J]. Journal of Traffic and Transportation Engineering, 2018, 18(6):142-158. |
| [1] | CHENG Xiaoya,ZHANG Lei. Research on Occluded Face Recognition Method Based on Deep Learning [J]. Electronic Science and Technology, 2022, 35(1): 35-39. |
| [2] | ZHAN Yinwei,ZHU Baiwan,YANG Zhuo. Research and Application of Vehicle Face Recognition Algorithm [J]. Electronic Science and Technology, 2021, 34(8): 1-7. |
| [3] | MA Lixin,DOU Chenfei,SONG Chencan,YANG Tianxiao. Insulator Nondestructive Testing Based on Feature Fusion CNN [J]. Electronic Science and Technology, 2021, 34(7): 26-30. |
| [4] | XUE Yongjie,JU Zhiyong. Fish Recognition Algorithm Based on Improved AlexNet [J]. Electronic Science and Technology, 2021, 34(4): 12-17. |
| [5] | SHAO Hang,WANG Yongxiong,QIN Yulong. Digital Image Composition Optimization Based on Salient Feature Algorithm [J]. Electronic Science and Technology, 2021, 34(3): 36-42. |
| [6] | YAN Chao,SUN Zhanquan,TIAN Engang,ZHAO Yangyang,FAN Xiaoyan. Research Progress of Medical Image Segmentation Based on Deep Learning [J]. Electronic Science and Technology, 2021, 34(2): 7-11. |
| [7] | PEI Xiaofang, HU Min. Study on the Identification of Various Growth and Monitoring of Pest and Disease of Rhododendron [J]. Electronic Science and Technology, 2021, 34(1): 17-22. |
| [8] | YE Fei, LIU Zilong. Pedestrian Detection Based on Improved YOLOv3 Algorithm [J]. Electronic Science and Technology, 2021, 34(1): 5-9. |
| [9] | ZHANG Zechen,JU Zhiyong. Multi-feature Fusion Fruit and Vegetable Image Classification Based on Bag of Feature Model [J]. Electronic Science and Technology, 2020, 33(7): 41-45. |
| [10] | WANG Chunjiang,LI Peng. Design of Moving Target Detection System Based on ZYNQ [J]. Electronic Science and Technology, 2020, 33(5): 82-86. |
| [11] | SI Qin,LI Feifei,CHEN Qiu. Face Recognition Algorithm Based on Deep Learning and Feature Fusion [J]. Electronic Science and Technology, 2020, 33(4): 18-22. |
| [12] | CHENG Junhua,ZENG Guohui,LIU Jin. Research on Complex Background Image Classification Method Based on Deep Learning [J]. Electronic Science and Technology, 2020, 33(12): 59-66. |
| [13] | GUAN Hongyun,SU Zhentao,WANG Chen. Improved Background Subtraction Based on Feature Fusion [J]. Electronic Science and Technology, 2020, 33(12): 22-27. |
| [14] | SHAO Yu'e,WANG Jianlai,ZHOU Shenghua,LIU Hongwei,ZHANG Yuehong. Radar Pulse Compression Method Based on LASSO [J]. Electronic Science and Technology, 2020, 33(11): 7-10. |
| [15] | WU Qian,WU Fei,LUO Lizhi. Human Skeleton-based Action Recognition Based on Deep Learning [J]. Electronic Science and Technology, 2020, 33(11): 79-83. |
