Electronic Science and Technology ›› 2023, Vol. 36 ›› Issue (6): 41-49.doi: 10.16180/j.cnki.issn1007-7820.2023.06.007
Previous Articles Next Articles
LU Minlong,GUO Wei,ZHANG Xuanxiong
Received:2021-12-08
Online:2023-06-15
Published:2023-06-20
Supported by:CLC Number:
LU Minlong,GUO Wei,ZHANG Xuanxiong. UWB/PDR Pedestrian Localization System Based on Adaptive UKF[J].Electronic Science and Technology, 2023, 36(6): 41-49.
Figure 1.
UWB ranging timing"
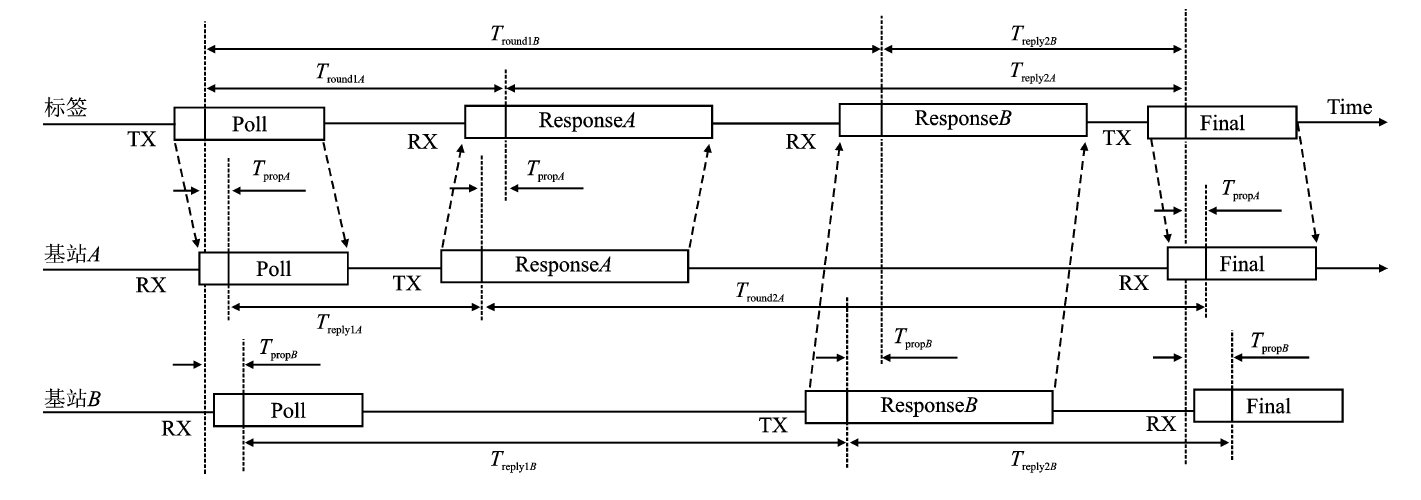
Figure 2.
Step count detection"
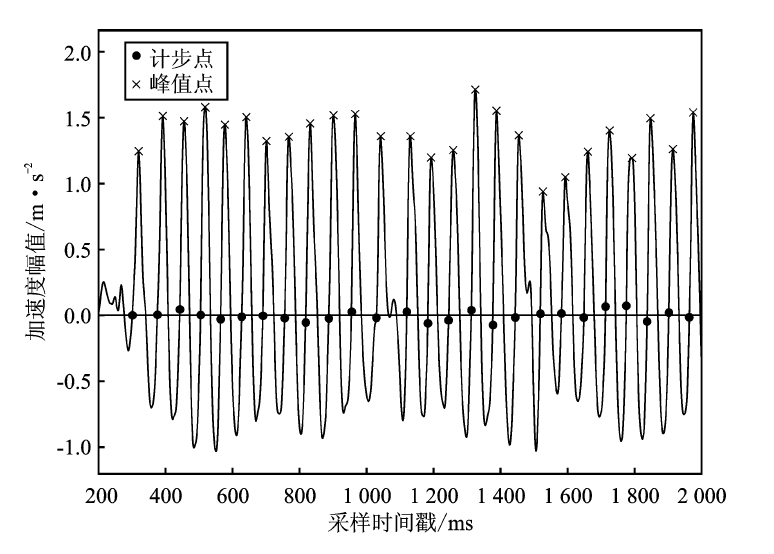
Figure 3.
System structure block diagram"
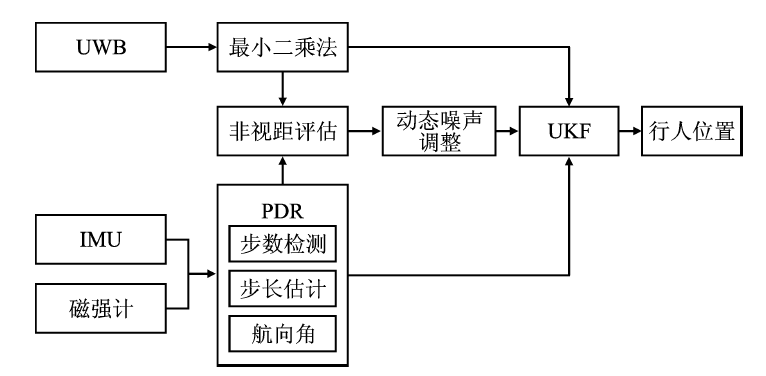
Figure 4.
Hardware modules and test methods (a)Hardware modules (b)Test methods"
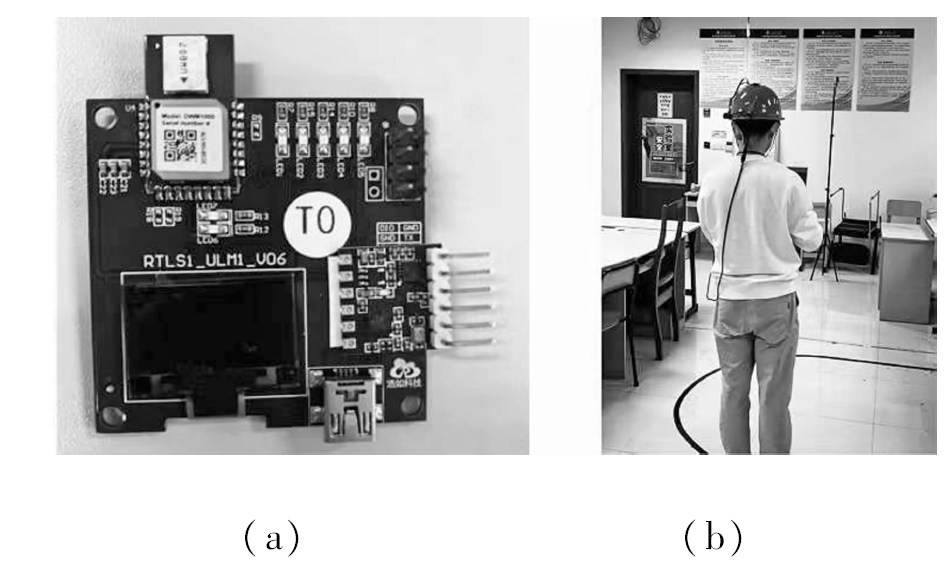
Table 1.
Statistical results of steps"
| 实验 | 实际步数 | 统计步数 |
|---|---|---|
| 60 cm步长 | 72 | 72 |
| 72 cm步长 | 60 | 60 |
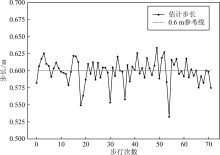
Figure 5.
Estimation of 60 cm step length"
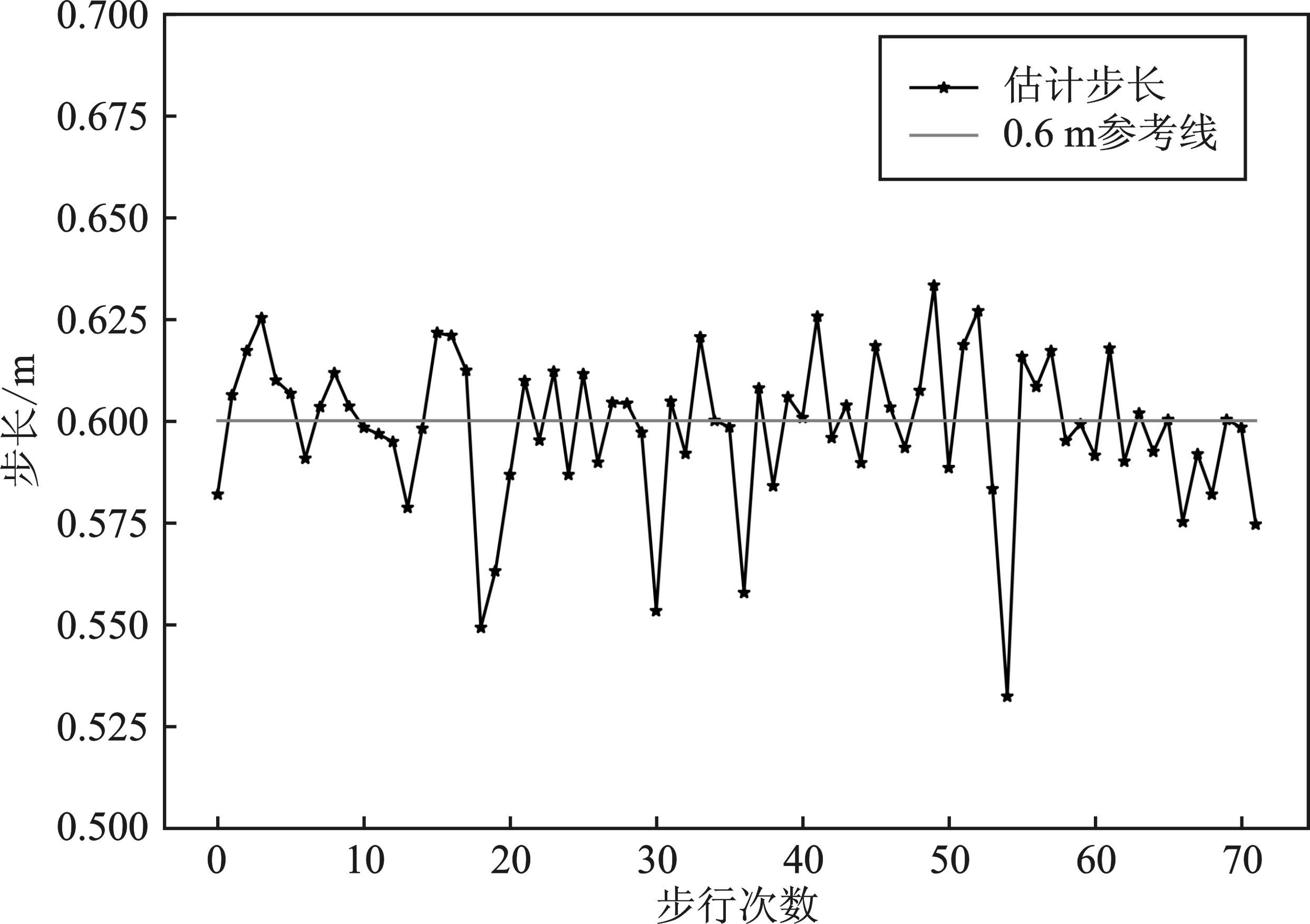
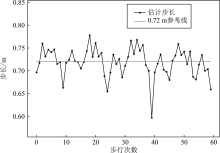
Figure 6.
Estimation of 72 cm step length"
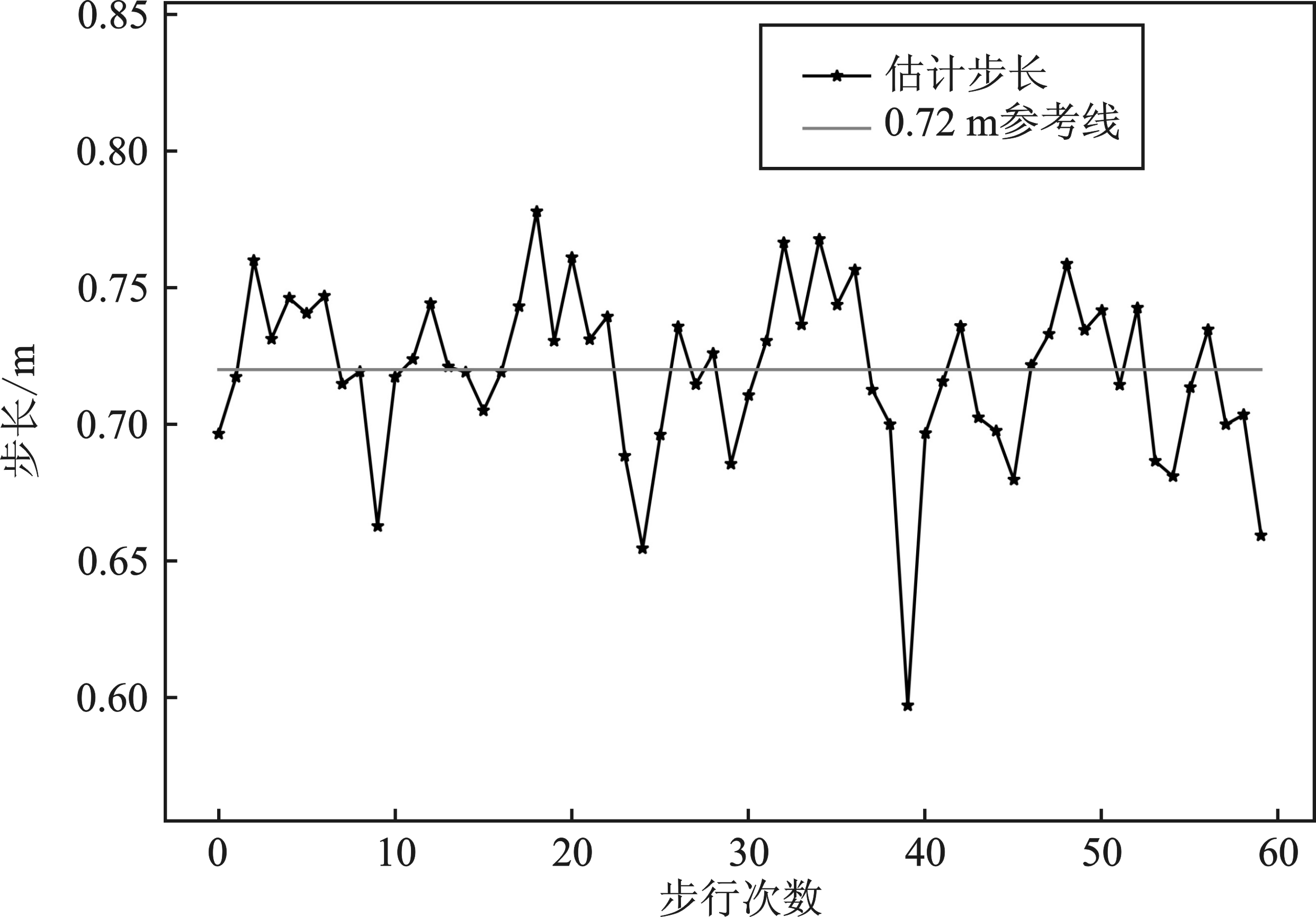
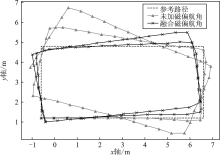
Figure 7.
PDR calculation trajectory"
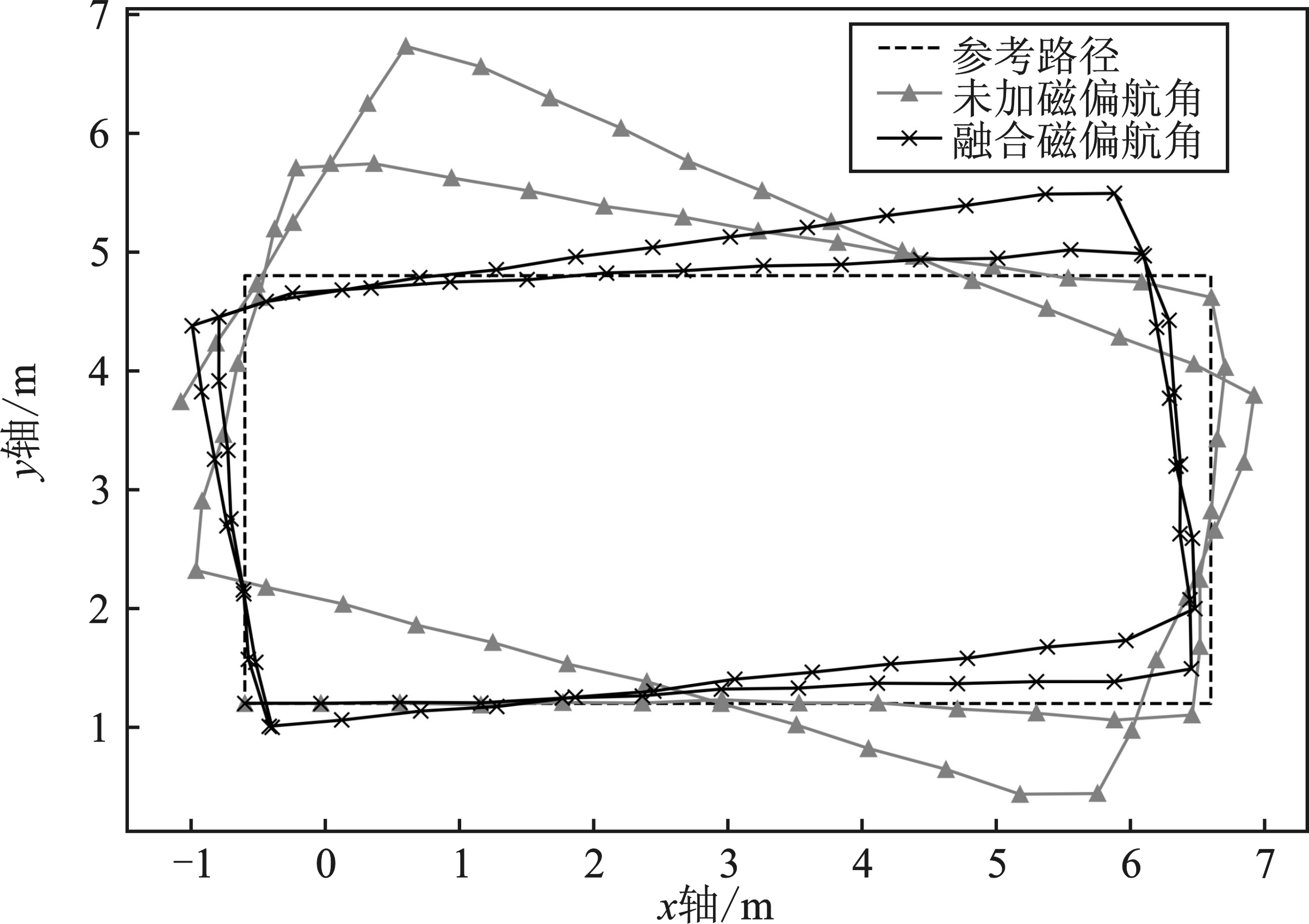
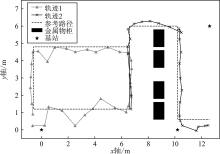
Figure 8.
UWB positioning tracking"
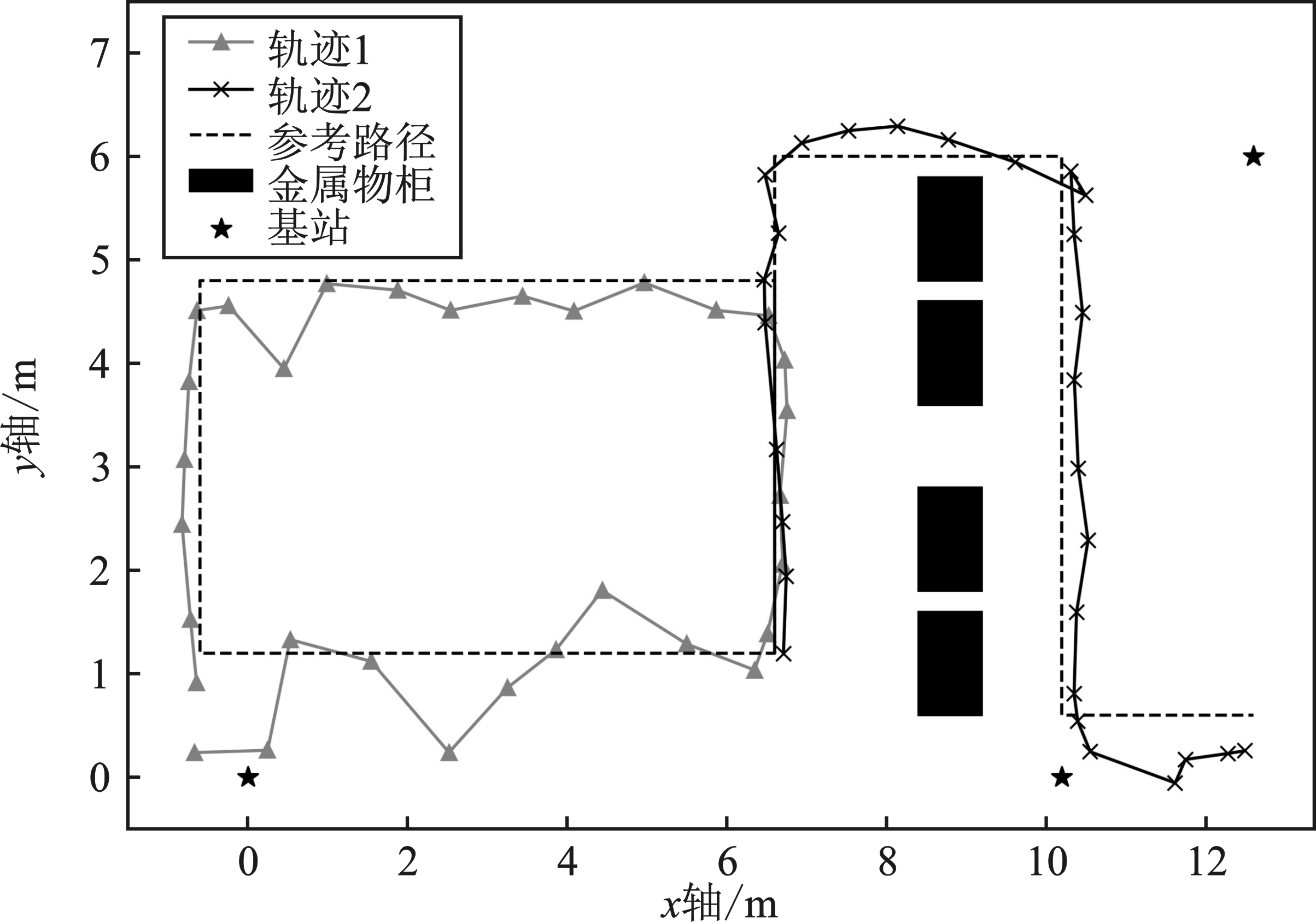
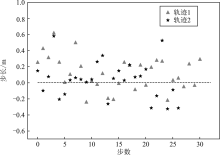
Figure 9.
Step difference distribution"
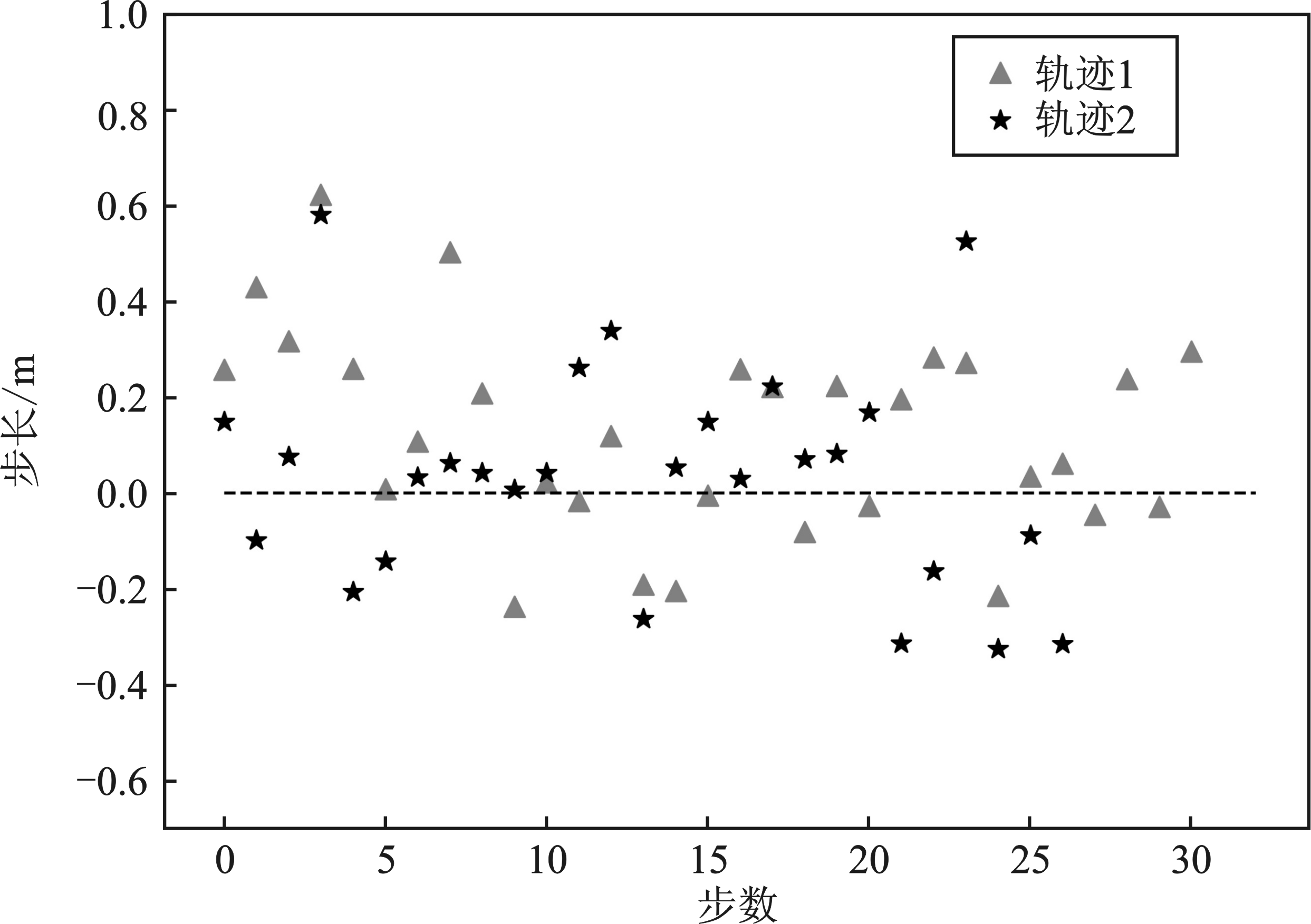
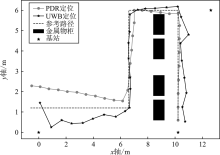
Figure 10.
Single positioning tracking"
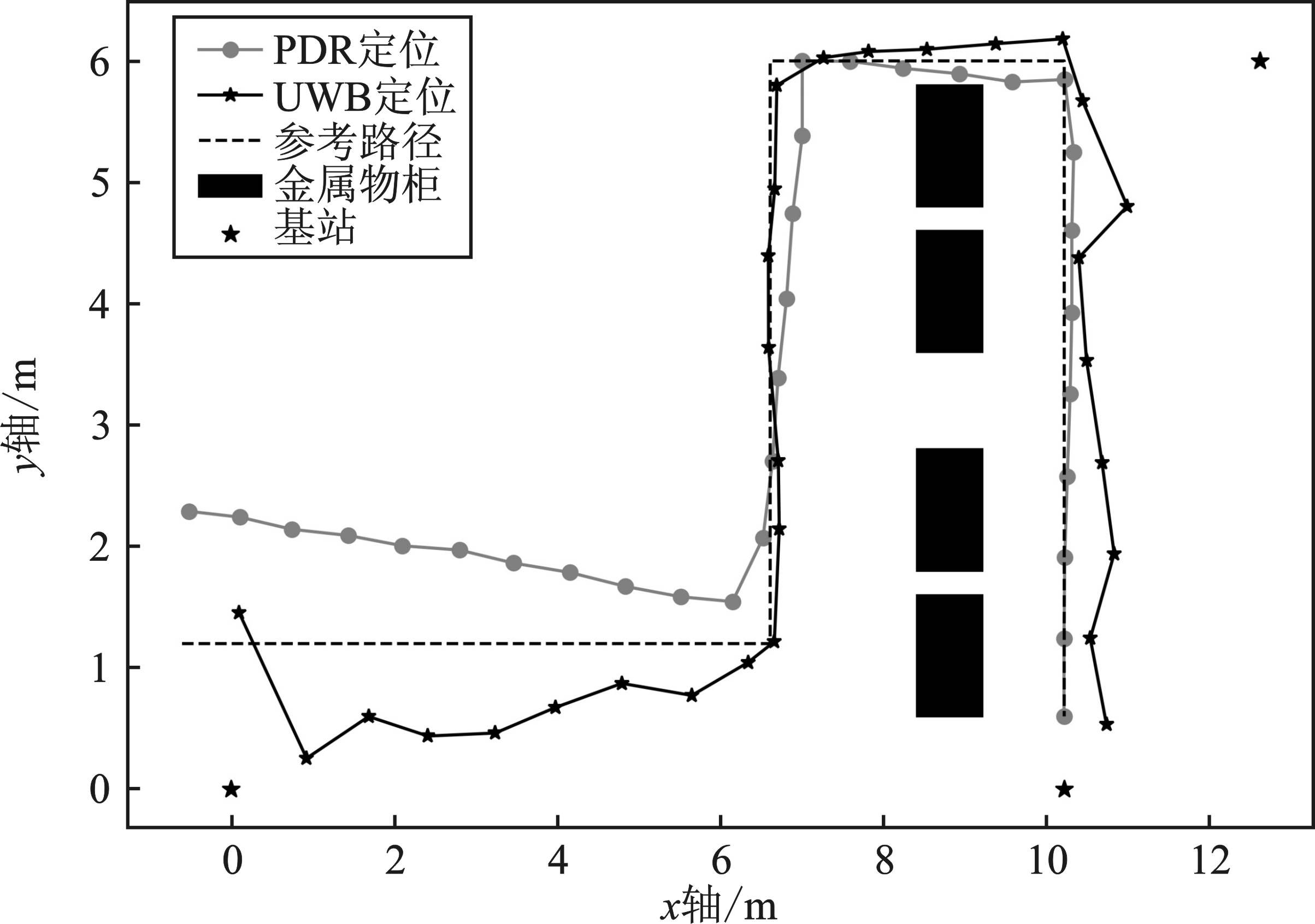
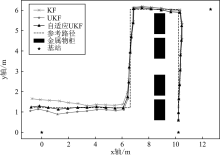
Figure 11.
Combination positioning track comparison"
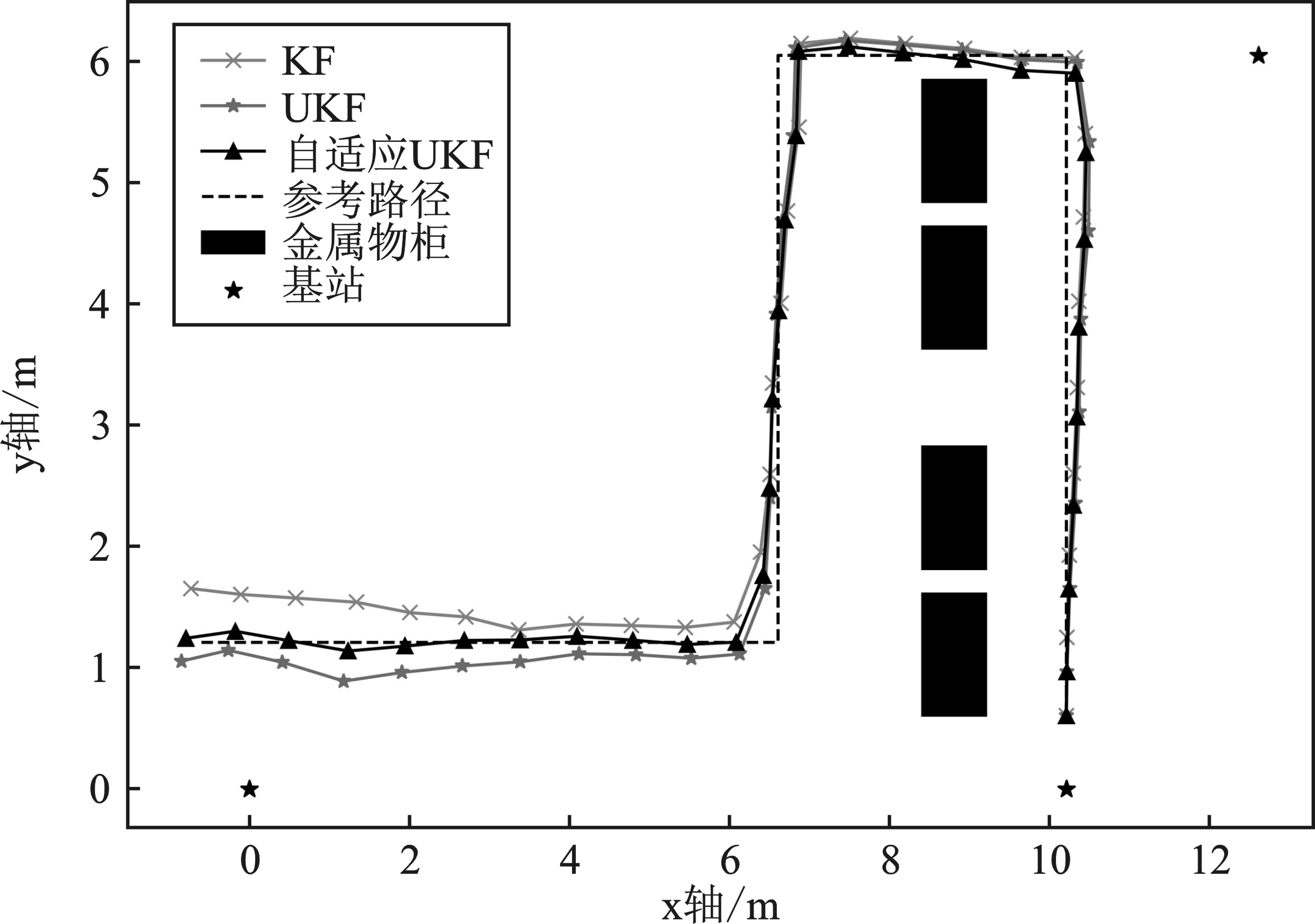

Figure 12.
Cumulative error distribution"

Table 2.
Positioning error statistics"
| 定位方法 | 平均误差/m | 最大误差/m |
|---|---|---|
| 自适应UKF | 0.076 | 0.247 |
| UKF | 0.122 | 0.288 |
| KF | 0.147 | 0.392 |
| UWB定位 | 0.171 | 0.773 |
| PDR定位 | 0.275 | 0.941 |
| [1] | Zafari F, Gkelias A, Leung K K. A survey of indoor localization systems and technologies[J]. IEEE Communications Surveys & Tutorials, 2019, 21(3):2568-2599. |
| [2] |
Obeidat H, Shuaieb W, Obeidat O, et al. A review of indoor localization techniques and wireless technologies[J]. Wireless Personal Communications, 2021, 119(1):289-327.
doi: 10.1007/s11277-021-08209-5 |
| [3] | 章裕润, 吴飞, 毛万葵. 基于WiFi-GM指纹的室内定位算法[J]. 电子科技, 2019, 32(5):49-54. |
| Zhang Yurun, Wu Fei, Mao Wankui. Indoor location algorithm based on WiFi-geomagnetism[J]. Electronic Science and Technology, 2019, 32(5):49-54. | |
| [4] | Ridolfi M, Kaya A, Berkvens R, et al. Self-calibration and collaborative localization for UWB positioning systems[J]. ACM Computing Surveys, 2021, 54(4):1-27. |
| [5] | 丁亚男, 张旭, 徐露. 基于UWB的室内定位技术综述[J]. 智能计算机与应用, 2019, 9(5):91-94. |
| Ding Yanan, Zhang Xu, Xu Lu. Overview of indoor positioning technology based on UWB[J]. Intelligent Computer and Applications, 2019, 9(5):91-94. | |
| [6] |
Wu Y, Zhu H B, Du Q X, et al. A survey of the research status of pedestrian dead reckoning systems based on inertial sensors[J]. International Journal of Automation and Computing, 2019, 16(1):65-83.
doi: 10.1007/s11633-018-1150-y |
| [7] |
Bai N, Tian Y, Liu Y, et al. A high-precision and low-cost IMU-based indoor pedestrian positioning technique[J]. IEEE Sensors Journal, 2020, 20(12):6716-6726.
doi: 10.1109/JSEN.7361 |
| [8] | You W, Li F, Liao L, et al. Data fusion of UWB and IMU based on unscented Kalman filter for indoor localization of quadrotor UAV[J]. IEEE Access, 2020(8):64971-64981. |
| [9] | Zeng Z, Liu S, Wang L. NLOS detection and mitigation for UWB/IMU fusion system based on EKF and CIR[C]. Chongqing: Proceedings of the Eighteenth IEEE International Conference on Communication Technology, 2018:376-381. |
| [10] |
Zhan M, Xi Z H. Indoor location method of WiFi/PDR fusion based on extended Kalman filter fusion[J]. Journal of Physics Conference Series, 2020, 16(4):1-12.
doi: 10.1088/1742-6596/16/1/001 |
| [11] |
Feng D, Wang C, He C, et al. Kalman-filter-based integration of IMU and UWB for high-accuracy indoor positioning and navigation[J]. IEEE Internet of Things Journal, 2020, 7(4):3133-3146.
doi: 10.1109/JIoT.6488907 |
| [12] |
Bonnin-Pascual F, Ortiz A. UWB-based self-localization strategies: A novel ICP-based method and a comparative assessment for noisy-ranges-prone environments[J]. Sensors, 2020, 20 (19):5613-5618.
doi: 10.3390/s20195613 |
| [13] |
Vandermeeren S, Steendam H. PDR/UWB based positioning of a shopping cart[J]. IEEE Sensors Journal, 2021, 21(9):10864-10878.
doi: 10.1109/JSEN.2021.3060110 |
| [14] |
Hobara H, Sakiko S, Satoru H, et al. Individual step characteristics during sprinting in unilateral transtibial amputees[J]. Journal of Applied Biomechanics, 2018, 34(6):509-513.
doi: 10.1123/jab.2017-0288 pmid: 29989464 |
| [15] | 张小红, 罗科干, 陶贤露, 等. 一种基于穿戴式MEMS传感器状态识别的多部位PDR算法[J]. 武汉大学学报(信息科学版), 2021, 46(12):1791-1801. |
| Zhang Xiaohong, Luo Kegan, Tao Xianlu, et al. A multi‐mouted PDR algorithm based on wearable MEMS sensors state recognition[J]. Geomatics and Information Science of Wuhan University, 2021, 46(12):1791-1801. | |
| [16] | 王献忠, 张肖, 刘艳. 陀螺与磁强计组合定姿及陀螺漂移估计[J]. 航天控制, 2017, 35(4):15-19. |
| Wang Xianzhong, Zhang Xiao, Liu Yan. Optimizing algorithm of attitude determination and drift estimation based on gyro and magnetometer[J]. Aerospace Control, 2017, 35(4): 15-19. | |
| [17] | Wang C, Han H, Wang J,etal. A robust extended Kalman filter applied to ultrawideband positioning[J]. Mathematical Problems in Engineering, 2020(3):1-12. |
| [18] |
Hxla C, Hang G B, Yqa B, et al. Research on multi-sensor pedestrian dead reckoning method with UKF algorithm[J]. Measurement, 2021, 16(9):1-12.
doi: 10.1016/0263-2241(95)00010-I |
| [19] |
Guo S, Zhang Y, Gui X, et al. An improved PDR/UWB integrated system for indoor navigation applications[J]. IEEE Sensors Journal, 2020, 20(14): 8046-8061.
doi: 10.1109/JSEN.7361 |
| [20] | 陈隆亮, 杨昳, 袁恩, 等. 基于UWB/PDR的组合室内定位算法[J]. 信息技术与网络安全, 2019, 38(5):53-57. |
| Chen Longliang, Yang Yi, Yuan En, et al. Integrated indoor positioning algorithm based on UWB/PDR[J]. Network and Communication, 2019, 38(5):53-57. |
| [1] | GUO Wei,ZHANG Xuanxiong. UWB/PDR Integrated Indoor Pedestrian Positioning [J]. Electronic Science and Technology, 2022, 35(8): 41-46. |
| [2] | HU Wenqiang,HU Jianpeng. WiFi/PDR Fusion Real-Time Localization Algorithm Based on Region Constraint [J]. Electronic Science and Technology, 2022, 35(10): 21-26. |
| [3] | XIU Xiaobo,LI Boquan,ZHOU Feng. Optimization of Temperature Sensor Location Based on Genetic Algorithm [J]. Electronic Science and Technology, 2021, 34(9): 17-23. |
| [4] | LIU Qi,SHEN Feng,WANG Rui. Design of Hardware Platform for UWB Positioning System [J]. Electronic Science and Technology, 2019, 32(10): 22-27. |
| [5] | CA Ji-Zhou, GUAN Ba-Ran. Design of a Novel and Small Size UWB Antenna With Triple-Band Notched Characteristic [J]. , 2018, 31(3): 10-. |
| [6] | XI Zhihong,LI Junwen. A Design for 4G Beidou Platform Based on ARM + DSP Architecture [J]. , 2016, 29(6): 85-. |
| [7] | OUYANG Weizhong,ZHOU Yonggang,LI Bonan,XIE Qianqian. A High Gain Vivaldi Ultra Wideband Antenna [J]. , 2015, 28(8): 15-. |
| [8] | HU Xikun,ZHU Guofu,JIN Tian. Research on Performance of Portable Ultra-wideband Through Wall Imaging Radar under Different Array Modes [J]. , 2014, 27(9): 93-. |
| [9] | XI Zhihong,GENG Gengfei,FU Cunli. A Design and Implementation of a BD Positioning System Based on the Dual Antenna [J]. , 2014, 27(8): 101-. |
| [10] | WANG Zheng,CHEN Bing. A Novel NLOS Error Suppression Algorithm Based on TDOA Wireless Positioning [J]. , 2014, 27(6): 9-. |
| [11] | SHEN Dongdong,LI Xiaowei,SONG Xuwen,HE Zhinan. UWB Indoor Precise Positioning Algorithm Based on Multilayer Neural Network [J]. , 2014, 27(5): 161-. |
| [12] | CHEN Chen,ZHAO Lijuan2. The Design and Realization of the Data Link Layer High-speed transmission scheme of the IR-UWB System [J]. , 2013, 26(9): 137-. |
| [13] | YI Kai, LIU Wei, ZHANG Bao-Tong. Maneuvering Target Tracking Method Based on IMM-UKF [J]. , 2012, 25(4): 6-. |
| [14] | WU Zhong-Liang, LIANG Jing, REN Jie, WANG Shao-Yu. Analysis of Current Status and Future Trend of UV Communication System [J]. , 2011, 24(8): 119-. |
| [15] | LIU Xiu-Xiang, LEI Zhen-Ye, WANG Yong-Guang, WANG Jun-Peng, HU Hai-Peng. An Improved Ultra-wideband Horn Antenna [J]. , 2011, 24(8): 90-. |
|
