Electronic Science and Technology ›› 2020, Vol. 33 ›› Issue (5): 33-38.doi: 10.16180/j.cnki.issn1007-7820.2020.05.006
Previous Articles Next Articles
CHEN Jiupeng,SAN Hongjun,ZHANG Daoyi,HU Qiongqiong,ZHANG Kaixiang,XIONG Binzhou
Received:2019-03-28
Online:2020-05-15
Published:2020-06-02
Supported by:CLC Number:
CHEN Jiupeng,SAN Hongjun,ZHANG Daoyi,HU Qiongqiong,ZHANG Kaixiang,XIONG Binzhou. Diagonal Gait Simulation Analysis of a Quadruped Robot[J].Electronic Science and Technology, 2020, 33(5): 33-38.
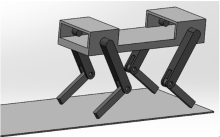
Figure 1.
Simplified model of quadruped robot"
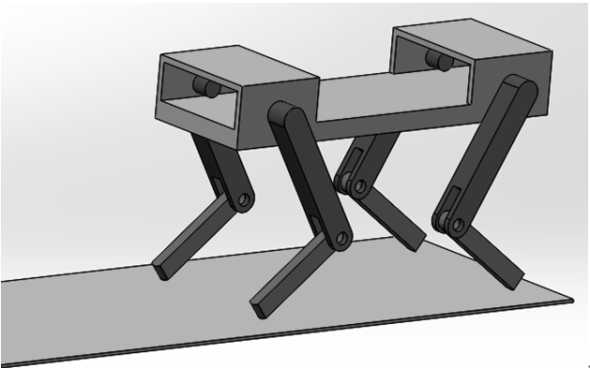
Table 1
Robot structural parameters"
| 参数 | 单位/mm |
|---|---|
| 机身长度 | 1 200 |
| 机身宽度 | 560 |
| 机身高度 | 735.5 |
| 大腿长度 | 530 |
| 小腿长度 | 320 |
| 地板 | 800×5 000 |
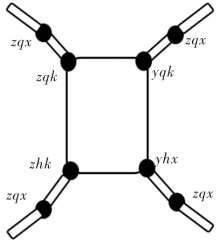
Figure 2.
Joint expression of robot"
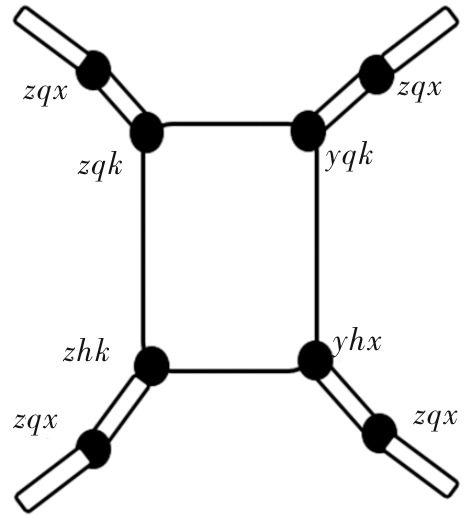
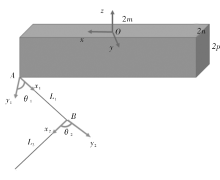
Figure 3.
Robot mechanism sketch"
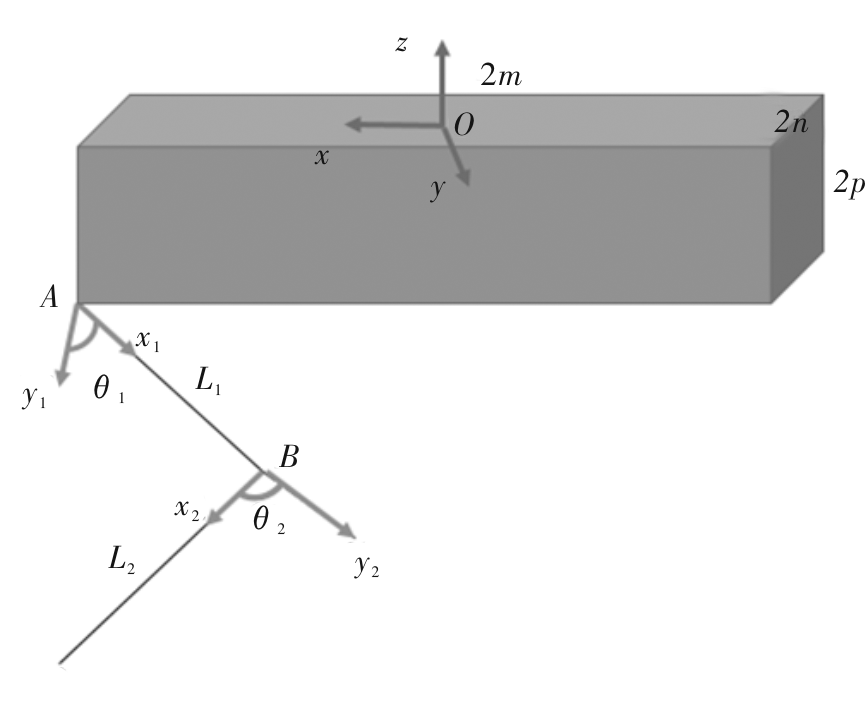
Figure 4.
Constraint relation"
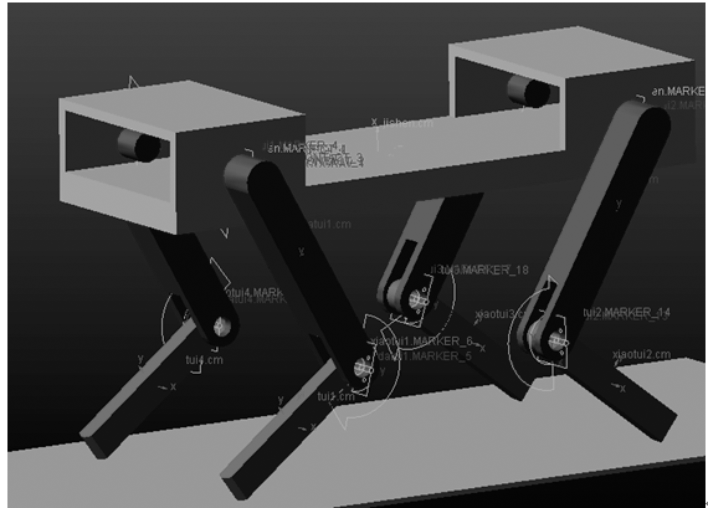

Figure 5.
Setting contact parameters"
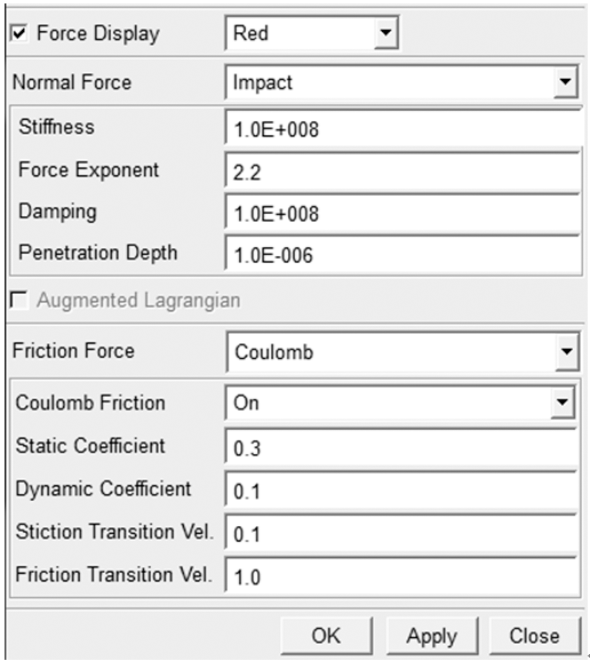

Figure 6.
Setting inputs and outputs"
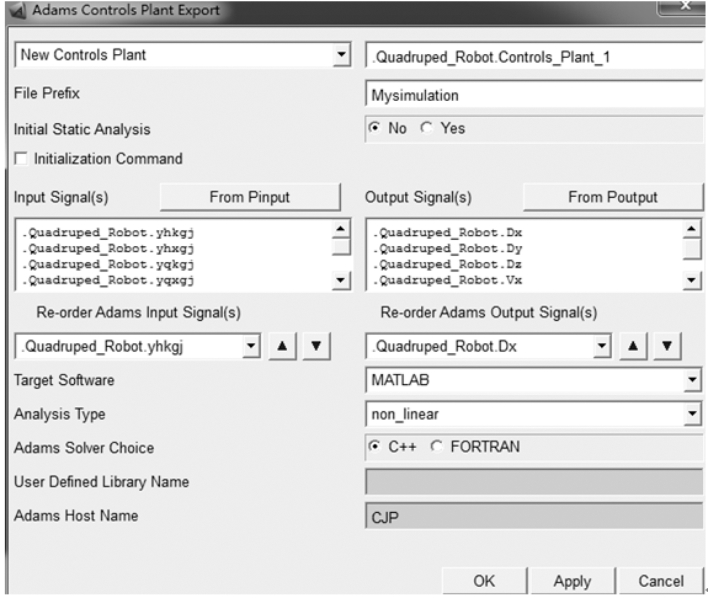
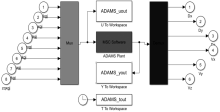
Figure 7.
ADAMS output model"
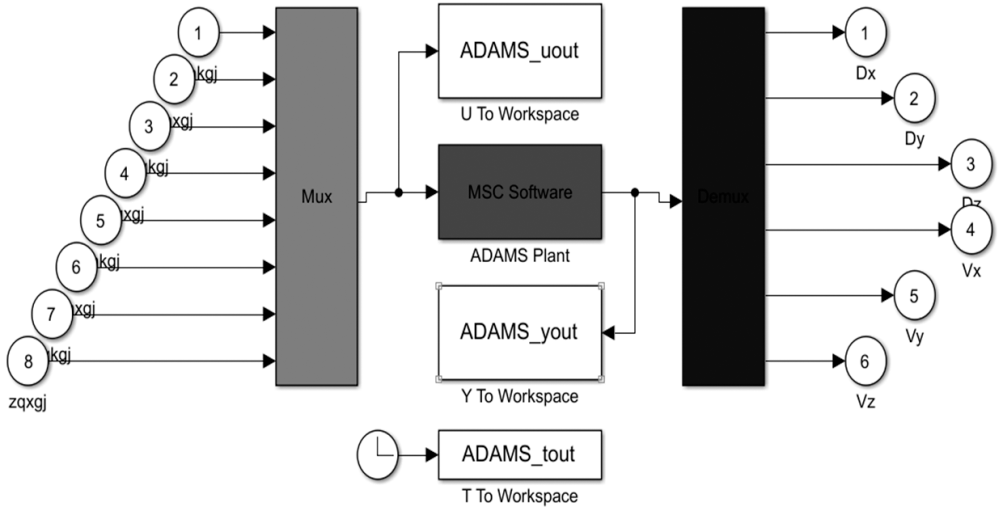

Figure 8.
Simulink control system construction"
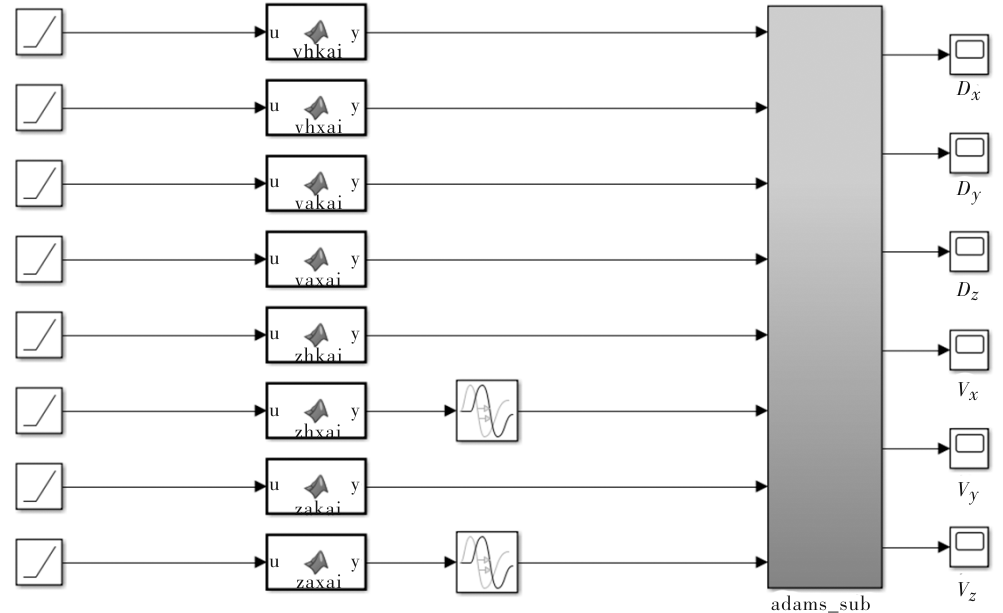
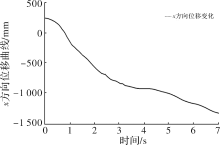
Figure 9.
Displacement of the center of mass in the x direction"
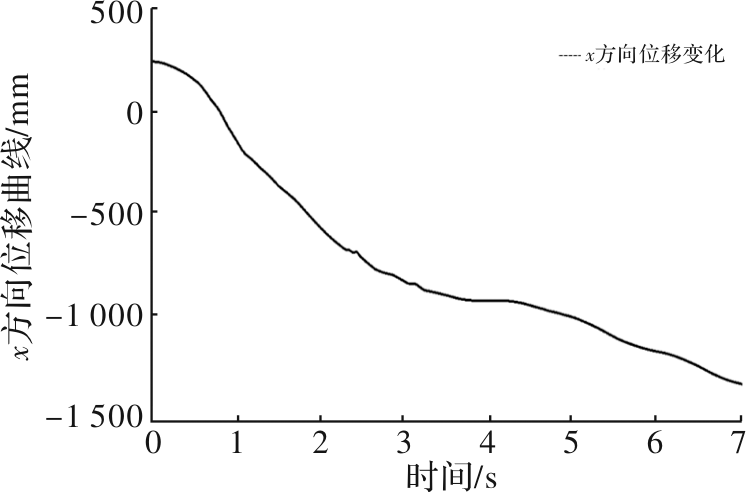
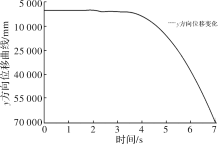
Figure 10.
Displacement of the center of mass in the y direction"
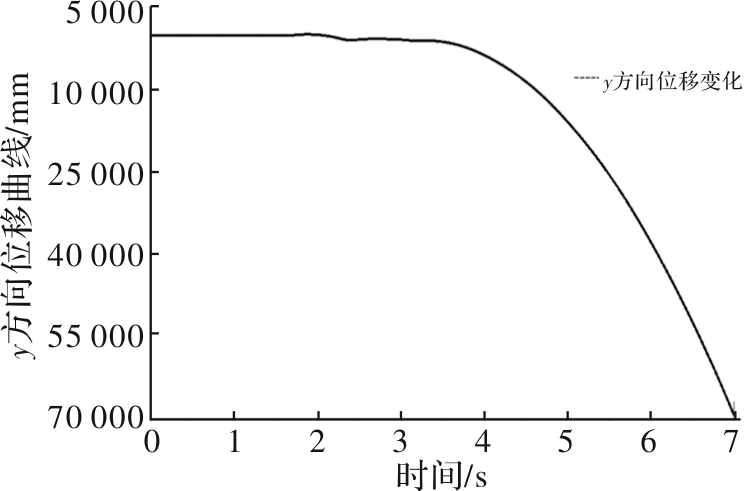

Figure 11.
Displacement of the center of mass in the z direction"
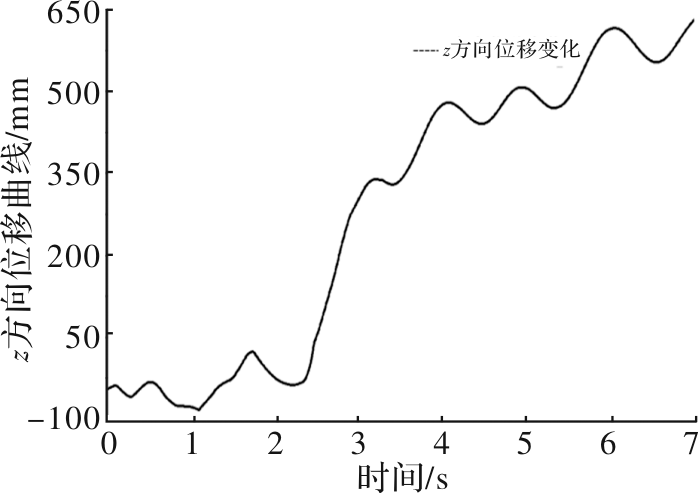
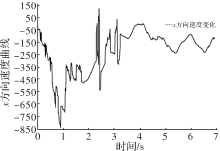
Figure 12.
Velocity of the center of mass in the x direction"
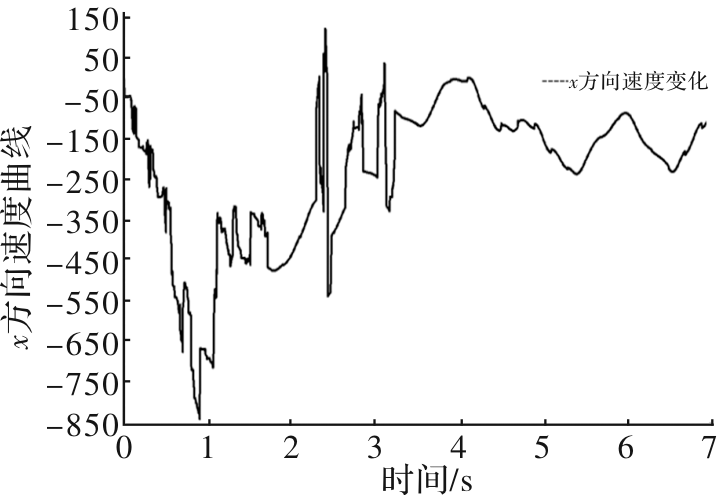
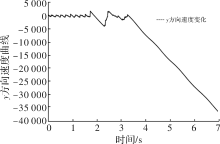
Figure 13.
Velocity of the center of mass in the y direction"
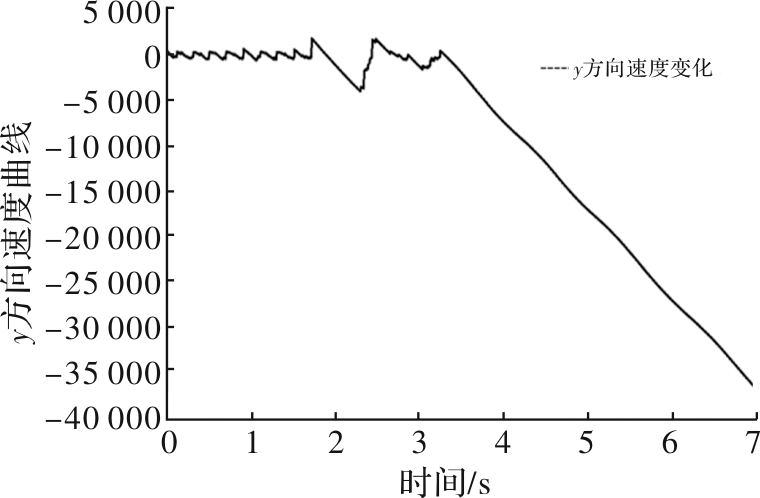
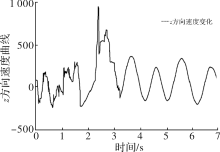
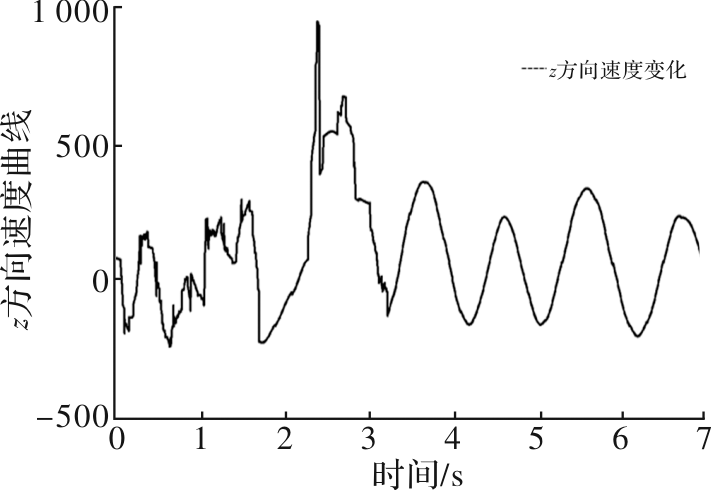
Figure 14.
Velocity of the center of mass in the z direction"
| [1] |
Lee D V, Biewener A A . Bigdog-inspired studies in the locomotion of goats and goats and dogs[J]. Integrative and Comparative Biology, 2011,51(1):190-202.
doi: 10.1093/icb/icr061 |
| [2] | 丁良宏, 王润孝, 冯华山 , 等. 浅谈BigDog四足机器人[J]. 中国机械工程, 2012,23(5):505-514. |
| Ding Lianghong, Wang Runxiao, Feng Huashan , et al. Brief analysis of a BigDog quadruped robot[J]. China Machinery Engineering, 2012,23(5):1-9. | |
| [3] | 张锦荣 . 基于虚拟样机技术的四足机器人仿真研究[D]. 西安:西北工业大学, 2007. |
| Zhang Jingrong . Simulation research on a four-legged robot based on virtual prototype technology[D]. Xi’an:Northwestern Polytechnical University, 2007. | |
| [4] | 刘东辉, 郑楠楠, 杨丽丽 , 等. 基于Matlab Simulink 和VR 工具箱的双足行走仿真[J]. 河北科技大学学报, 2011,32(3):238-241. |
| Liu Donghui, Zheng Nannan, Yang Lili , et al. Simulation of bipedal walking based on matlab Simulink and VR toolbox[J]. Journal of Hebei University of Science and Technology, 2011,32(3):238-241. | |
| [5] | 陈学东, 孙翊, 贾文川 . 多足步行机器人运动规划与控制[M]. 武汉: 华中科技大学出版社, 2006. |
| Chen Xuedong, Sun Yi, Jia Wenchuan. Motion planning and control of multi-legged walking robots[M]. Wuhan: Huazhong University of Science and Technology Press, 2006. | |
| [6] | 马宗利, 刘永超, 朱彦防 , 等. 奔跑四足机器人腿结构设计与分析[J]. 东北大学学报, 2016,37(9):1305-1310. |
| Ma Zongli, Liu Yongchao, Zhu Yanfang , et al. Design and analysis of running quadruped robots’ leg structure[J]. Journal of Northeastern University, 2016,37(9):1305-1310. | |
| [7] | 田兴华, 高峰, 陈先宝 , 等. 四足仿生机器人混联腿构型设计及比较[J]. 机械工程学报, 2013,49(6):81-88. |
| Tian Xinghua, Gao Feng, Chen Xianbao , et al. Mechanism design and comparison for quadruped robot with parallel-serial leg[J]. Journal of Mechanical Engineering, 2013,49(6):81-88. | |
| [8] | 何东青, 马培荪 . 四足机器人动态步行仿真及步行稳定性分析[J]. 计算机仿真, 2005,22(2):146-149. |
| He Dongqing, Ma Peisun . Simulation of dynamic walking of quadruped robot and analysis of walking stability[J]. Computer Simulation, 2005,22(2):146-149. | |
| [9] | 陈亚, 王宇翔, 祝巍 , 等. 基于ADMAS的四足机器人运动仿真研究[J]. 河北工业科技,2013,30(6):424-428. |
| Chen Ya, Wang Yuxiang, Zhu Wei ,et al.Research on motion simulation of a four-legged robot based on ADAMS[J].Hebei Journal of Industrial Science and Technology, 2013,30(6):424-428. | |
| [10] | 庄明, 俞志伟, 龚达平 , 等. 基于ADAMS的液压驱动四足机器人步态规划与仿真[J].机械设计与制造, 2012(7):100-102. |
| Zhuang Ming, Yu Zhiwei, Gong Daping , et al. Gait planning and simulation of quadruped robot with hydraulic drive based on ADAMS[J].Machinery Design & Manufacture, 2012(7):100-102. | |
| [11] | 郭晖晖 . 四足机器人步态规划与运动控制研究[D]. 南京: 南京航空航天大学, 2017. |
| Guo Huihui . A research on gait plan and motion control of quadruped robot[D]. Nanjing:Nanjing University of Aeronautics, 2017. | |
| [12] | 王玉闯 . 新型四足步行机器人的步态规划与实验研究[D]. 郑州:郑州大学, 2017. |
| Wang Yuchuang . Research on gait planning and experiment of a novel quadruped walking robot[D]. Zhengzhou:Zhengzhou University, 2017. | |
| [13] | 蒋建新 . 一种仿生四足机器人步态规划与运动控制[D]. 重庆:重庆大学, 2018. |
| Jiang Jianxin . Gait planning and locomotion control of a bionic quadruped robot[D]. Chongqing:Chongqing University, 2018. | |
| [14] | 王立鹏 . 液压四足机器人驱动控制与步态规划研究[D]. 北京:北京理工大学, 2014. |
| Wang Lipeng . Research on control and gait planning for a hydraulic quadruped robot[D]. Beijing:Beijing Institute of Technology, 2014. | |
| [15] | 赵彦 . 基于ADAMS和MATLAB的四足机器人联合仿真[D]. 济南:山东大学, 2014. |
| Zhao Yan . The simulation of quadruped robot based on MATLAB and ADAMS[D]. Jinan:Shandong University, 2014. | |
| [16] | 罗庆生, 罗霄 . 仿生四足机器人技术[M]. 北京: 北京理工大学出版社, 2015. |
| Luo Qingsheng, Luo Xiao. Quadruped bionic robot trchnology[M]. Beijing: Beijing Institute of Technology Press, 2015. |
| [1] | SU Xiaohang,WANG Lihua,CHEN Jiaming. Research on Fatigue Life of Oil Cylinder System Based on Multi-Body Dynamics and Finite Element [J]. Electronic Science and Technology, 2022, 35(1): 40-44. |
| [2] | CHEN Jiaming,WANG Lihua,SU Xiaohang. Research on Mechanical Characteristics of Railway Bridge Ballast Bed Based on ADAMS [J]. Electronic Science and Technology, 2022, 35(1): 53-59. |
| [3] | NIU Shuaichen,WANG Fuzhong,HAN Yaofei,HE Guofeng,NIU Yeke. Control Strategy of Modular Multilevel Converter Under Unbalanced Grid Voltage [J]. Electronic Science and Technology, 2022, 35(1): 80-86. |
| [4] | LI Yudong,LIAN Haishan,HU Xiaodan. AC/AC Frequency Conversion Power Supply Based on Three-Phase Input [J]. Electronic Science and Technology, 2021, 34(9): 47-53. |
| [5] | CHEN Mingfang,ZHANG Kaixiang,CHEN Jiupeng,XIONG Bingzhou,LI Qi,YAO Guoyi,LI Pengyu. Simulation and Optimization of Quadruped Robot Trajectory Based on MATLAB Robotics Toolbox [J]. Electronic Science and Technology, 2020, 33(9): 31-37. |
| [6] | WU Qiang,ZHANG Wei,YANG Huiting,WANG Chaoying. Application of Particle Swarm Optimization Based on Beetle Antennae Search Algorithm in PID Parameter Tuning [J]. Electronic Science and Technology, 2020, 33(6): 18-23. |
| [7] | ZHANG Daoyi,SAN Hongjun,CHEN Jiupeng,LI Pengfei,XIONG Binzhou. Velocity Kinematics Analysis and Simulation of 5-DOF Hybrid Engraving Machine [J]. Electronic Science and Technology, 2020, 33(4): 42-49. |
| [8] | FAN Lele,WANG Xudong,FENG Haichao,XU Xiaozhuo. ModelingAnd Simulation of Primary Winding Piecewise PMSLM System Based on Vector Control [J]. Electronic Science and Technology, 2020, 33(12): 1-6. |
| [9] | QI Tao,BAI Guozhen,JIANG Hongchao. Simulation Modeling of Electric Servo Loading System Based on Simulink [J]. Electronic Science and Technology, 2019, 32(8): 1-6. |
| [10] | JI Shengyang,WANG Xudong,XU Xiaozhuo,SUN Weixiang,SHI Kaining. Research on Direct Torque Control of Permanent Magnet Synchronous Motor Based on Sliding Mode Control [J]. Electronic Science and Technology, 2019, 32(7): 1-5. |
| [11] | ZHOU Ping,GAO Han,ZHENG Yuejiu,LAI Xin,ZHOU Long. An Active Equalization Method for Lithium-ion Battery Pack Based on Additional Battery [J]. Electronic Science and Technology, 2019, 32(6): 37-42. |
| [12] | CHEN Jiupeng,SAN Hongjun,LI Pengfei,ZHANG Daoyi,XIONG Binzhou. Kinematics Analysis and Simulation for a Novel 5-DOF Serial-Parallel Robot [J]. Electronic Science and Technology, 2019, 32(12): 37-43. |
| [13] | JIN Ai-Juan, ZHENG Tian-Xiang, JI Chen-Ye, SU Dun-Hao, JIANG Yo-Cheng, HAO Chen-Xiang. Design and Simulation of Speed Regulator Based on Adaptive Fuzzy PID Control [J]. , 2018, 31(1): 29-. |
| [14] | MENG Shuang, SUO Long-Feng, DONG Wen-Juan, JIA Lei, DING Gui-Lin. Design of LED Hybrid Projection Lens Based on Prism and Microlens [J]. , 2018, 31(1): 46-. |
| [15] | CHEN Yunpeng,MAI Yunfei. Modeling and Simulation of Mechanical Steering Gear Impact Tester [J]. , 2017, 30(9): 122-. |
