Electronic Science and Technology ›› 2024, Vol. 37 ›› Issue (10): 15-22.doi: 10.16180/j.cnki.issn1007-7820.2024.10.003
Previous Articles Next Articles
JIN Tao, YU Lianzhi
Received:2023-03-23
Online:2024-10-15
Published:2024-11-04
Supported by:CLC Number:
JIN Tao, YU Lianzhi. Path Planning of Improved Artificial Potential Field Method Based on Deflection Angle Suppression[J].Electronic Science and Technology, 2024, 37(10): 15-22.

Figure 1.
Force analysis of unmanned vehicles"
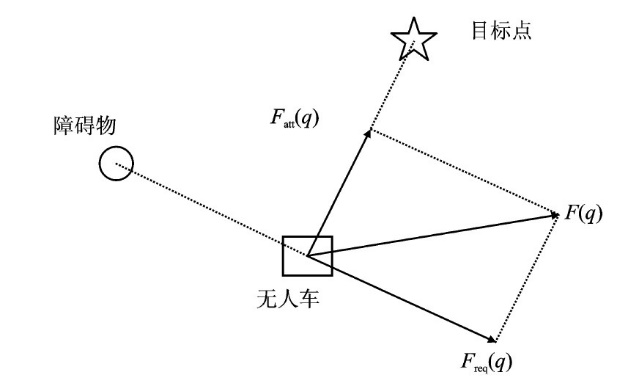
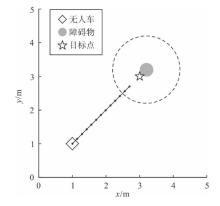
Figure 2.
Goal unreachable"
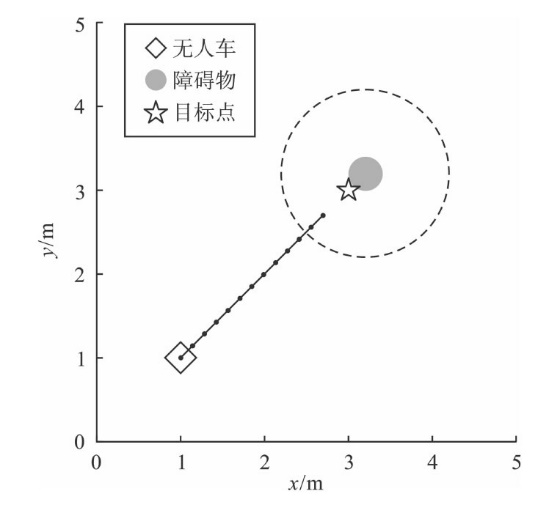
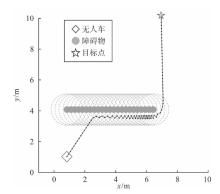
Figure 3.
Performance of path oscillation"
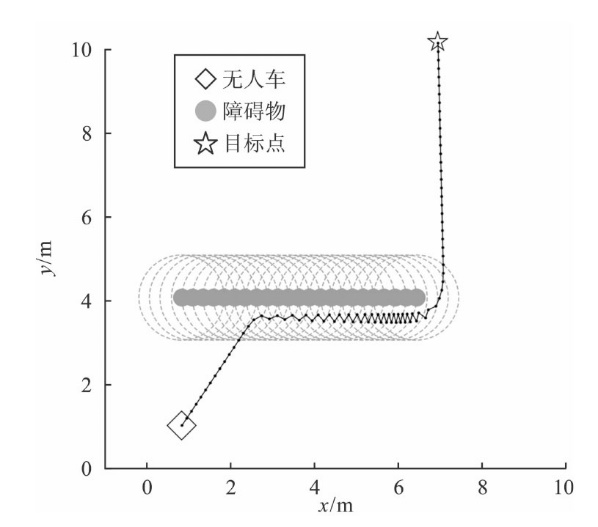
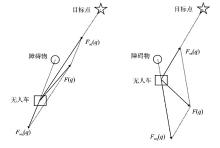
Figure 4.
Force analysis of oscillation point"
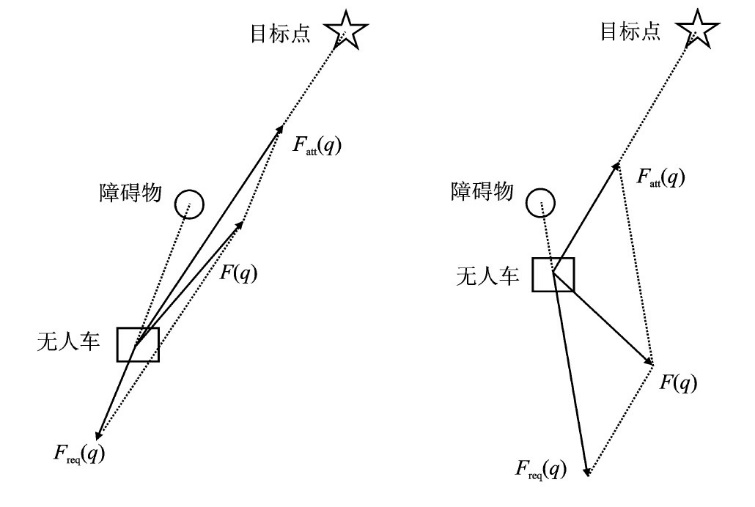
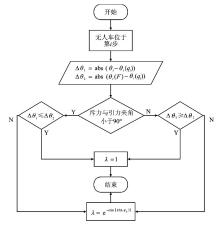
Figure 5.
Deflectionangle suppression factor determination process"
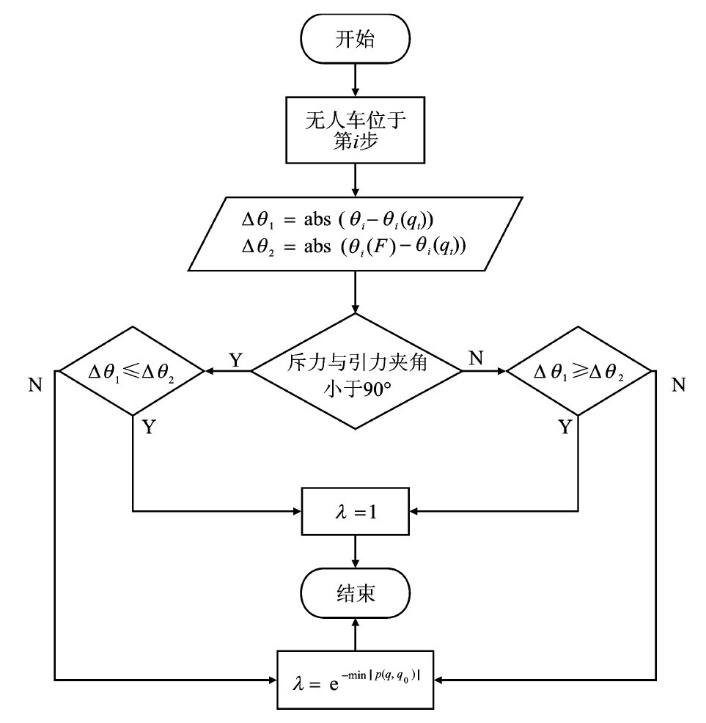

Figure 6.
Local minimum point"
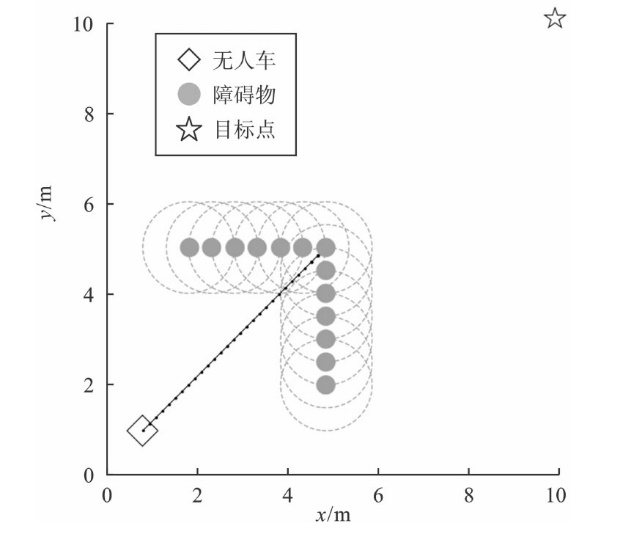
Figure 7.
Force analysis of unmanned vehicle after adding virtual target pointⅠ"
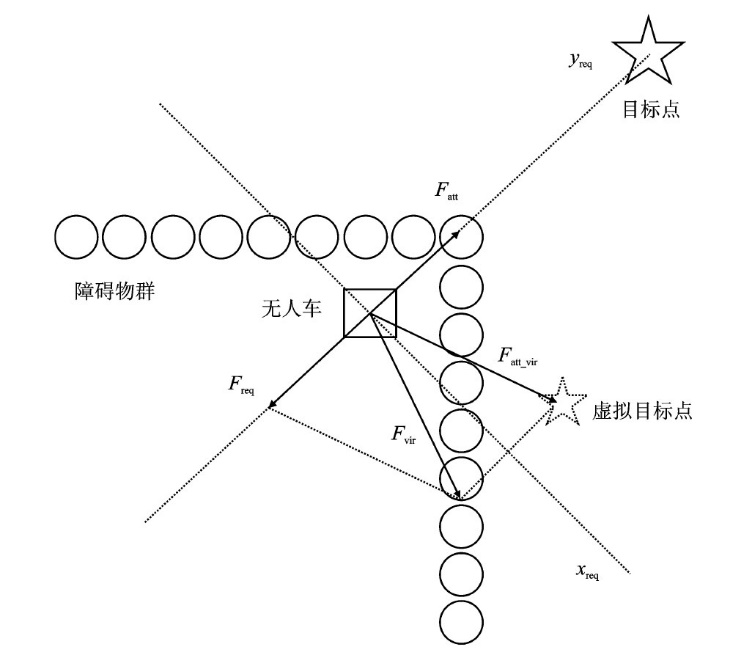

Figure 8.
Force analysis of unmanned vehicle after adding virtual target pointⅡ"
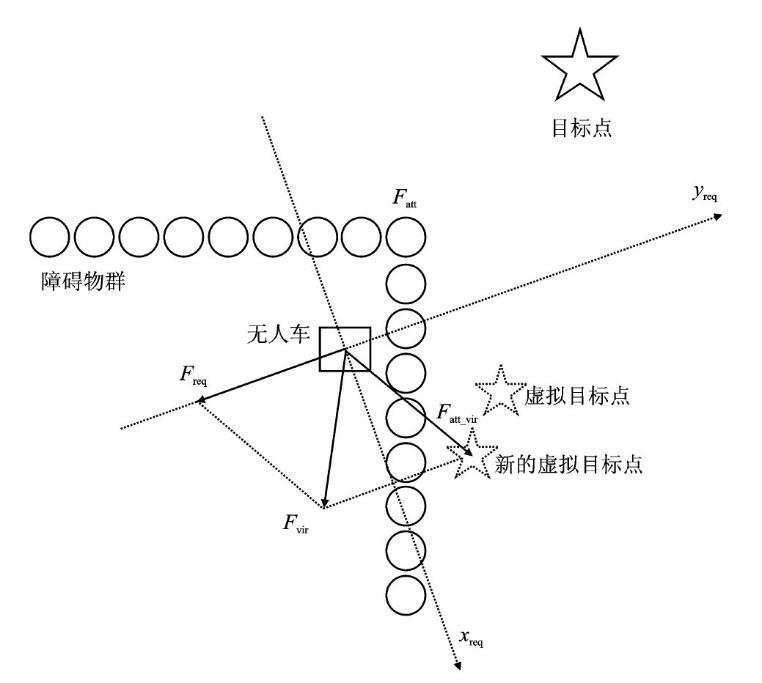
Figure 9.
Steering angle analysis"
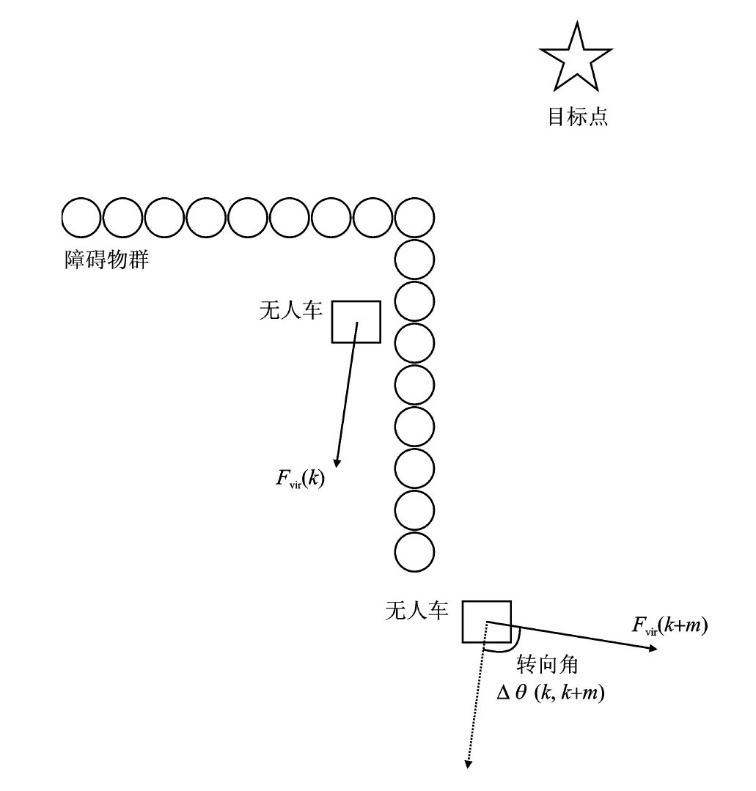
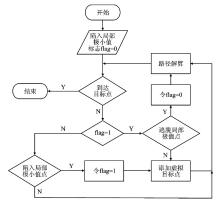
Figure 10.
Path resolution process after using virtual target points"
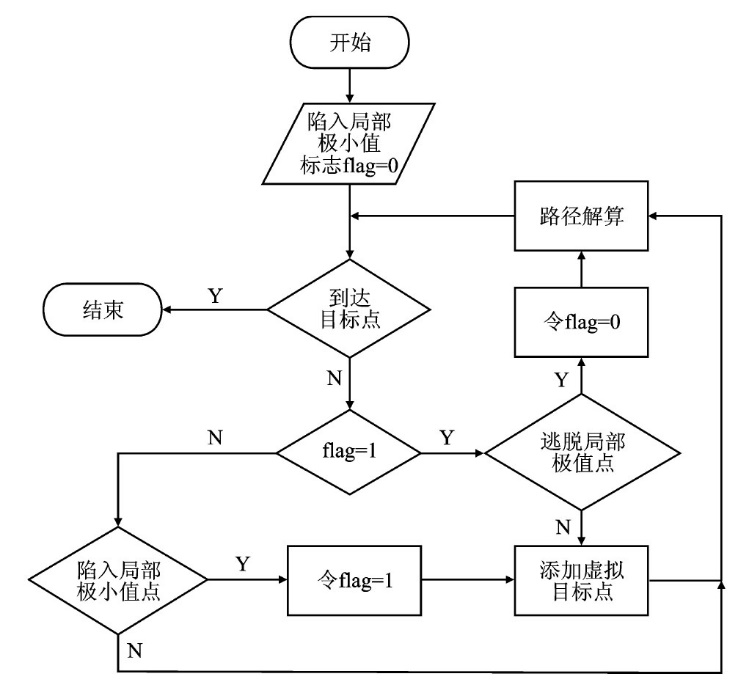
Table 1.
Simulation experiment parameters setting"
| 参数 | 数值 |
|---|---|
| 障碍物半径/m | 0.2 |
| 障碍物影响半径/m | 1.0 |
| 斥力增益系数 | 0.5 |
| 目标点模糊距离/m | 0.1 |
| 引力增益系数 | 1.0 |
| 无人车步长/m | 0.2 |
| 逃脱判定周期/步 | 5.0 |
Figure 11.
Simulation results after improved repulsion"
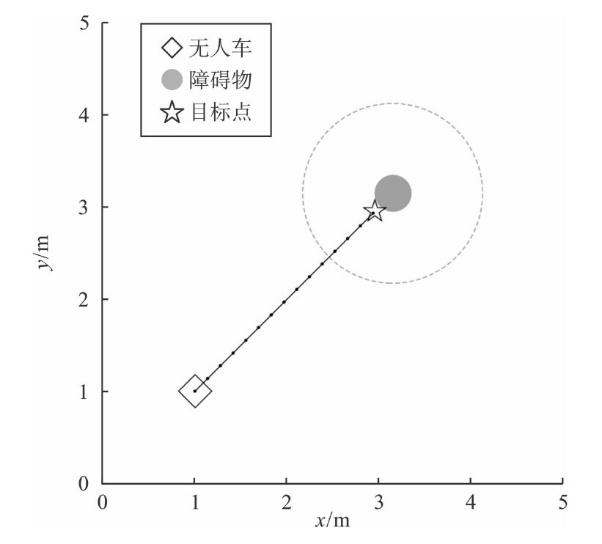
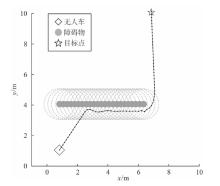
Figure 12.
Simulation results after introducing deflection angle suppression factor"
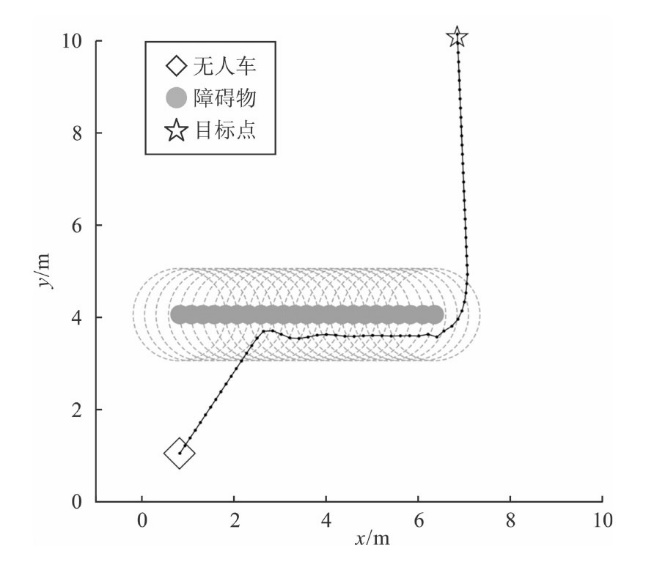
Table 2.
Comparison of simulation experiment results before and after introducing deflection angle suppression factor"
| 算法 | 步数 | 累积偏转角/(°) |
|---|---|---|
| 传统势场法 | 88 | 4 836.12 |
| 引入偏转角抑制因子 | 69 | 320.27 |

Figure 13.
Simulation results of changing gravitational components under three-point collinearity"
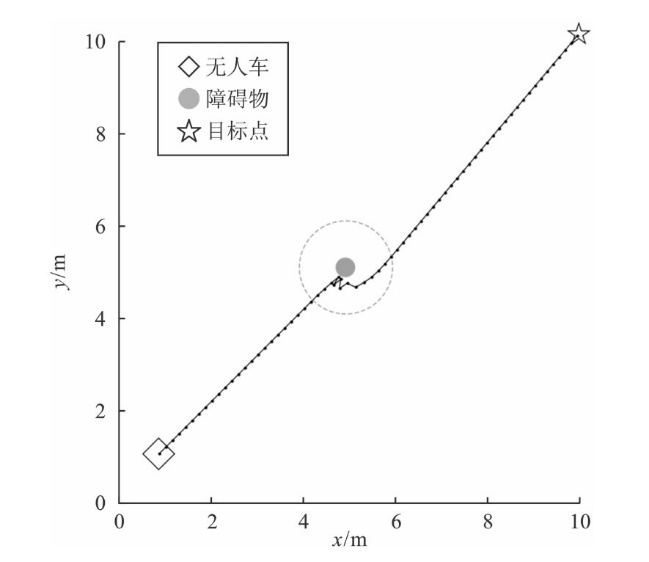

Figure 14.
Simulation results of introducing virtual target point under three-point collinearity"
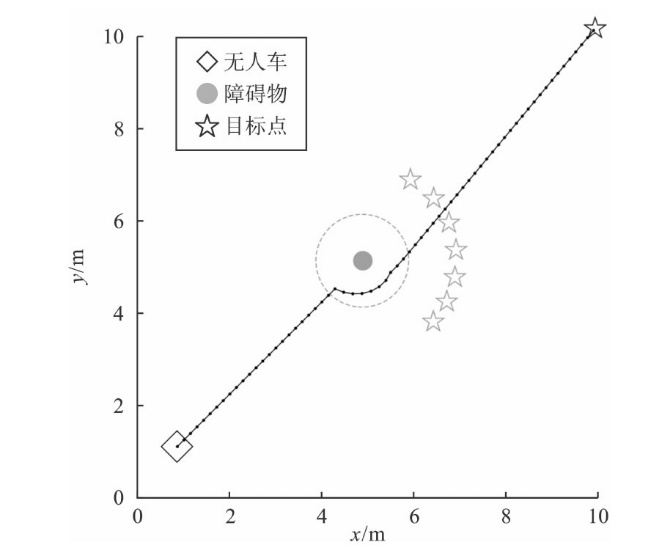
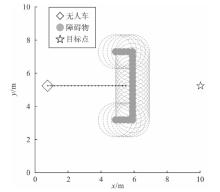
Figure 15.
Simulation results of changing gravitational components under U-shaped obstacles"
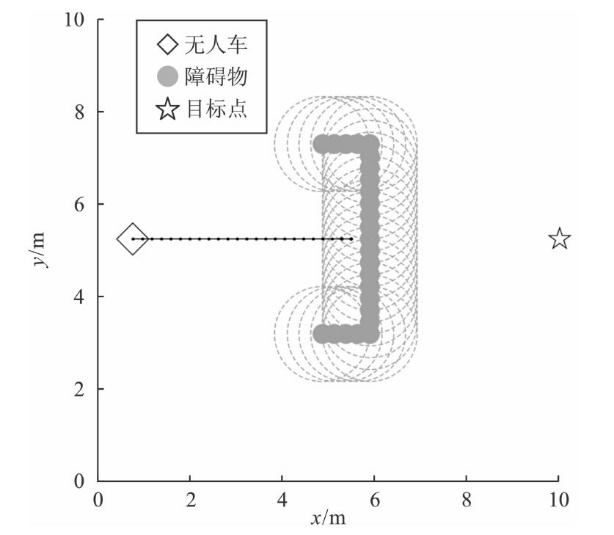
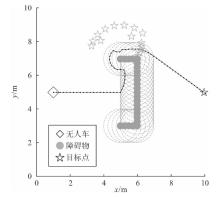
Figure 16.
Simulation results of introducing virtual target point under U-shaped obstacles"
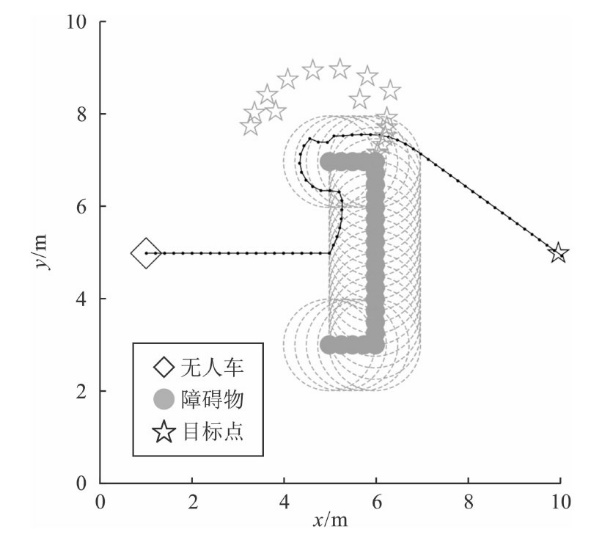
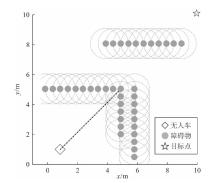
Figure 17.
Simulation results of algorithm A in complex environment"
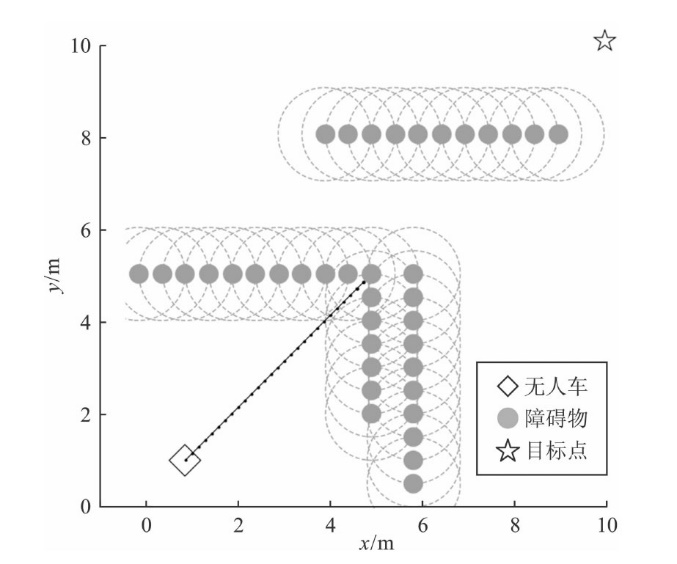
Figure 18.
Simulation results of algorithm B in complex environment"
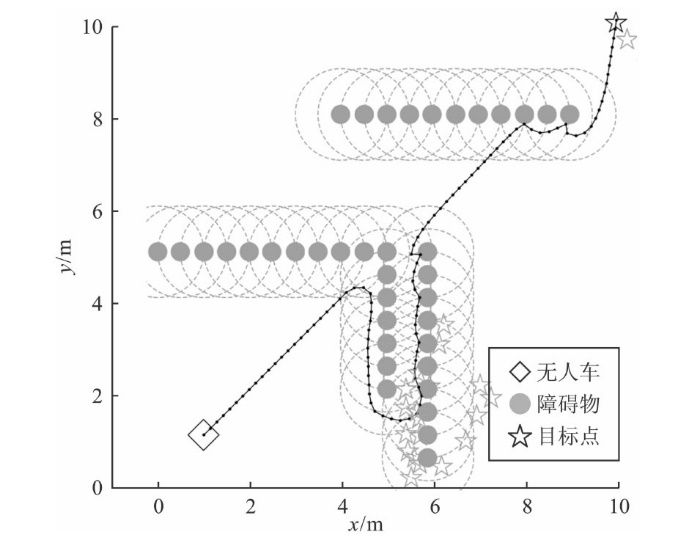
Figure 19.
Simulation results of algorithm C in complex environment"
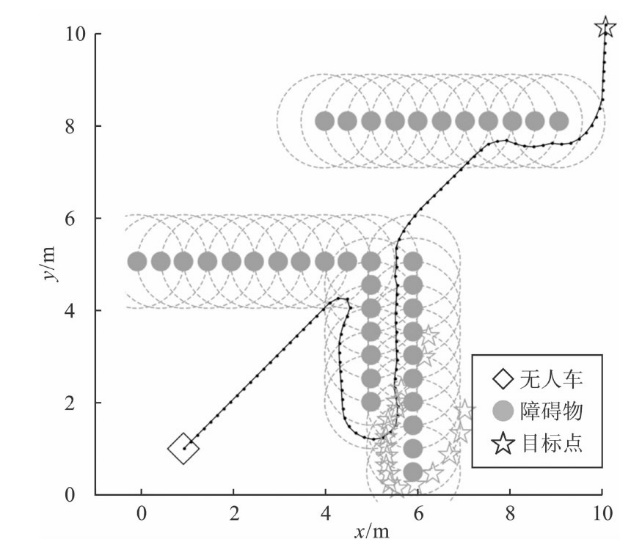
Table 3.
Comparison of simulation experiment results in complex environment"
| 算法 | 是否到达目标点 | 碰撞次数 | 步数 |
|---|---|---|---|
| A | N | - | - |
| B | Y | 4 | 101 |
| C | Y | 0 | 94 |
| [1] | 罗欣, 丁晓军. 地面移动作业机器人运动规划与控制研究综述[J]. 哈尔滨工业大学学报, 2021, 53(1):1-15. |
| Luo Xin, Ding Xiaojun. Research and prospective on motion planning and control of ground mobile mainpulators[J]. Journal of Harbin Institute of Technology, 2021, 53(1):1-15. | |
| [2] | 卢东祥. 智能交通路径规划算法研究综述[J]. 电子科技, 2022, 35(7):22-27. |
| Lu Dongxiang. A survey of intelligent transportation path planning algorithms[J]. Electronic Science and Technology, 2022, 35(7):22-27. | |
| [3] | 石志刚, 梅松, 邵毅帆, 等. 基于人工势场法的移动机器人路径规划研究现状与展望[J]. 中国农机化学报, 2021, 42(12):182-188. |
| Shi Zhigang, Mei Song, Shao Yifan, et al. Research status and prospect of path planning for mobile robots based on artificial potential field method[J]. Journal of Chinese Agricultural Mechanization, 2021, 42(12):182-188. | |
| [4] | 许志远. 基于改进神经网络的船舶航行路径规划[J]. 舰船科学技术, 2022, 44(14):57-60. |
| Xu Zhiyuan. Rearch on ship navigation path planning based on improved neural networks[J]. Ship Science and Technology, 2022, 44(14):57-60. | |
| [5] | Xu X, Zhoya M. Path planning in Multi-AGVs using amodified A-star algorithm[J]. International Journal for Innovation Education and Research, 2020, 8(5):273-282. |
| [6] | 徐伟杰, 高海若. 基于改进Dijstra算法的多源点最佳逃逸路线规划[J]. 通讯世界, 2019, 26(5):241-243. |
| Xu Weijie, Gao Hairuo. Multisource optimal escape route planning based on improved Dijstra algorithm[J]. Telecom World, 2019, 26(5):241-243. | |
| [7] | 万鹏, 时培成, 梁涛年, 等. 基于粒子群算法的车道保持模型预测控制研究[J]. 机械设计与研究, 2022, 38(1):38-42,50. |
| Wan Peng, Shi Peicheng, Liang Taonian, et al. Research on model predictive control of lane keeping based on particle swarm optimization[J]. Mechanical Design and Research, 2022, 38(1):38-42,50. | |
| [8] | 梁晓辉, 慕永辉, 吴北华, 等. 关于路径规划的相关算法综述[J]. 价值工程, 2020, 39(3):295-299. |
| Liang Xiaohui, Mu Yonghui, Wu Beihua, et al. Summaryof path planning algorithms[J]. Value Engineering, 2020, 39(3):295-299. | |
| [9] | 豆祥忠. 基于改进人工势场法和栅格法的自主配送车避障研究[D]. 西安: 长安大学,2019:9-11. |
| Dou Xiangzhong. Research of obstacle avoidance of autonomous distribution vehicle based on improved artificial potential field algorithm and grid method[D]. Xi'an: Chang'an University,2019:9-11. | |
| [10] | 罗强, 王海宝, 崔小劲, 等. 改进人工势场法自主移动机器人路径规划[J]. 控制工程, 2019, 26(6):1091-1098. |
| Luo Qiang, Wang Haibao, Cui Xiaojin, et al. Autonomous mobile robot path planning based on improved artificial potential method[J]. Control Engineering of China, 2019, 26(6):1091-1098. | |
| [11] | 任工昌, 郭维鹏, 刘朋. 基于改进人工势场法的移动机器人避障研究[J]. 软件导刊, 2021, 20(2):97-101. |
| Ren Gongchang, Guo Weipeng, Liu Peng. Research on obstacle avoidance of mobile robot based on improved artificial potential field method[J]. Software Guide, 2021, 20(2):97-101. | |
| [12] | 张宇迪, 龚鹏, 胡为. 改进人工势场法的智能车路径规划[J]. 机械科学与技术, 2024, 43(8):1447-1453. |
| Zhang Yudi, Gong Peng, Hu Wei. Improved artificial potential field method for smart vehicle path planning[J]. Mechanical Science and Techonolgy for Aerospace Engineering, 2024, 43(8):1447-1453. | |
| [13] |
李二超, 王玉华. 改进人工势场法的移动机器人避障轨迹研究[J]. 计算机工程与应用, 2022, 58(6):296-304.
doi: 10.3778/j.issn.1002-8331.2108-0122 |
|
Li Erchao, Wang Yuhua. Research on obstacle avoidance trajectory of mobile robot based on improved artificial potential field[J]. Computer Engineering and Applications, 2022, 58(6):296-304.
doi: 10.3778/j.issn.1002-8331.2108-0122 |
|
| [14] | 陈冠星, 张志安, 黄学功, 等. 改进人工势场法在未知环境中的路径规划研究[J]. 机械与电子, 2021, 39(5):74-80. |
| Chen Guanxing, Zhang Zhian, Huang Xuegong, et al. Research on path planning of improved artificial potential field method in unknown environment[J]. Machinery & Electronics, 2021, 39(5):74-80. | |
| [15] | 李庆华, 尤越, 沐雅琪, 等. 一种针对大型凹型障碍物的组合导航算法[J]. 电子与信息学报, 2020, 42(4):917-923. |
| Li Qinghua, You Yue, Mu Yaqi, et al. Integrated navigation algorithm for large concave obstacles[J]. Journal of Electronics & Information Technology, 2020, 42(4):917-923. | |
| [16] | 魏立新, 吴绍坤, 孙浩, 等. 基于多行为的移动机器人路径规划[J]. 控制与决策, 2019, 34(12):2721-2726. |
| Wei Lixin, Wu Shaokun, Sun Hao, et al. Mobile robot path planning based on multi-behaviors[J]. Control and Decision, 2019, 34(12):2721-2726. | |
| [17] | 付雷, 秦一杰, 何顶新, 等. 基于改进人工势场法的多机器人编队避障[J]. 控制工程, 2022, 29(3):388-396. |
| Fu Lei, Qin Yijie, He Dingxin, et al. Obstacle avoidance in multi-robot formation based on improved artificial potential field[J]. Control Engineering of China, 2022, 29(3):388-396. | |
| [18] | 宋建辉, 代涛, 刘砚菊. 基于改进人工势场法的移动机器人路径规划[J]. 计算机工程与科学, 2017, 39(7):1328-1332. |
| Song Jianhui, Dai Tao, Liu Yanju. Path planning of mobile robots based on improved artificial potential field method[J]. Computer Engineering & Science, 2017, 39(7):1328-1332. | |
| [19] | Lazarowska A. Discrete artificial potential field approach to mobile robot path planning[J]. IFAC-Papers on Line, 2019, 52(8):277-282. |
| [20] | 郝林佳, 叶灿, 都书鲜, 等. 改进人工势场的手术机器人位姿规划[J]. 控制理论与应用, 2022, 39(6):1121-1129. |
| Hao Linjia, Ye Can, Du Shuxian, et al. Pose planning for surgical robot with improved artificial potential field method[J]. Control Theory and Applications, 2022, 39(6):1121-1129. |
| [1] | LI Jun, LIU Hu, YANG Haima, WANG Yuan, XU Wencheng, HUANG Hongxin. Research on AGV Path Fusion of Object Detection and DWA Algorithm [J]. Electronic Science and Technology, 2024, 37(7): 33-42. |
| [2] | WANG Yanchun, GUO Yongfeng, XIA Ying, WANG Yangyang. Research on Robot Global Path Planning Based on Improved Ant Colony Algorithm [J]. Electronic Science and Technology, 2024, 37(5): 88-94. |
| [3] | WANG Yangbin,ZHANG Wei,HU Zhi. Multi-UAV Path Planning Algorithm Based on Formation Change [J]. Electronic Science and Technology, 2023, 36(7): 39-48. |
| [4] | SUN Pengna,ZHANG Zhongmin. Path Planning and Smoothing for Unmanned Surface Vehicle Based on Improved Ant Colony Optimization [J]. Electronic Science and Technology, 2023, 36(3): 14-20. |
| [5] | LU Dongxiang. A Survey of Intelligent Transportation Path Planning Algorithms [J]. Electronic Science and Technology, 2022, 35(7): 22-27. |
| [6] | RAN Xianyuan,WANG Ran. Maximizing the Rest Time of Mobile Charger in Rechargeable Probabilistic Sensor Networks [J]. Electronic Science and Technology, 2022, 35(6): 13-20. |
| [7] | YE Hengchao,CHENG Zongmao. Research on Charging Method of Sensor Network Based on Relay Multi-Hop Model [J]. Electronic Science and Technology, 2021, 34(8): 31-36. |
| [8] | SHUI Jiusheng,WANG Ran. A On-Demand Multi-Node Priority Charging Scheduling Algorithm [J]. Electronic Science and Technology, 2021, 34(8): 43-49. |
| [9] | LIU Yongjian,ZENG Guohui,HUANG Bo,LI Xiaobin. Research on Robot Path Planning Based on Improved Ant Colony Algorithm [J]. Electronic Science and Technology, 2020, 33(1): 13-18. |
| [10] | LIU Xuefang,ZENG Guohui,HUANG Bo,LU Dunke. Research on Path Planning of Mobile Robot Based on Improved Ant Colony Algorithm [J]. Electronic Science and Technology, 2019, 32(9): 5-9. |
| [11] | MAO Chenyue,WU Pengyong. UAV Path Planning Obstacle Avoidance Algorithm Based on Artificial Potential Field Method [J]. Electronic Science and Technology, 2019, 32(7): 65-70. |
| [12] | HU Huimian. An Improved Path Planning Algorithm With Variable Probability Bidirectional RRT [J]. Electronic Science and Technology, 2019, 32(6): 16-21. |
| [13] | ZHAO Wei,ZENG Guohui,HUANG Bo,ZHU Shuangxin,LIU Jin. 3D Space Path Planning Research Based on Improved Local Search Algorithm [J]. Electronic Science and Technology, 2019, 32(6): 58-63. |
| [14] | YUE Xiu,ZHANG Wei. UAV Path Planning Based on Intelligent Algorithm [J]. Electronic Science and Technology, 2019, 32(2): 9-13. |
| [15] | XIA Lingru,SUN Shouqun. Planning Route for UAV Cooperative Combat [J]. , 2018, 31(1): 4-. |
|
||
