Electronic Science and Technology ›› 2023, Vol. 36 ›› Issue (3): 14-20.doi: 10.16180/j.cnki.issn1007-7820.2023.03.003
Previous Articles Next Articles
SUN Pengna,ZHANG Zhongmin
Received:2021-08-26
Online:2023-03-15
Published:2023-03-16
Supported by:CLC Number:
SUN Pengna,ZHANG Zhongmin. Path Planning and Smoothing for Unmanned Surface Vehicle Based on Improved Ant Colony Optimization[J].Electronic Science and Technology, 2023, 36(3): 14-20.
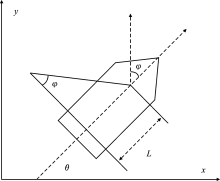
Figure 1.
Simplified steering model of USV"
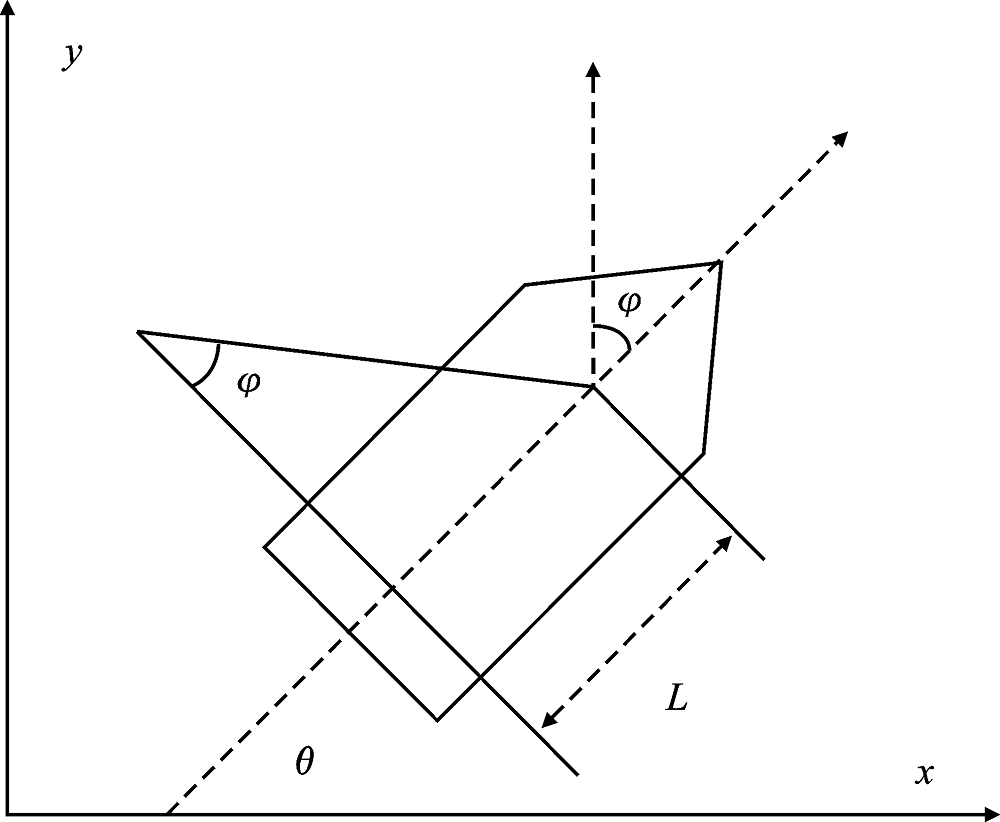

Figure 2.
Comparison chart of path smoothing and unsmoothing"
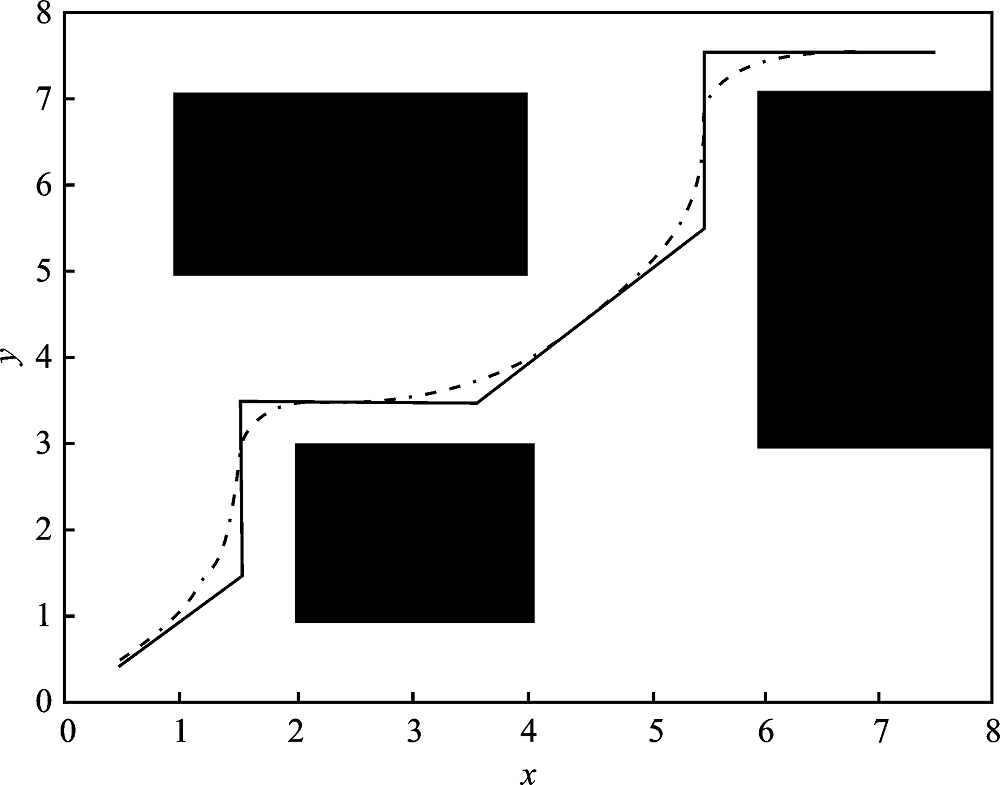
Figure 3.
Flow chart of the improved algorithm"
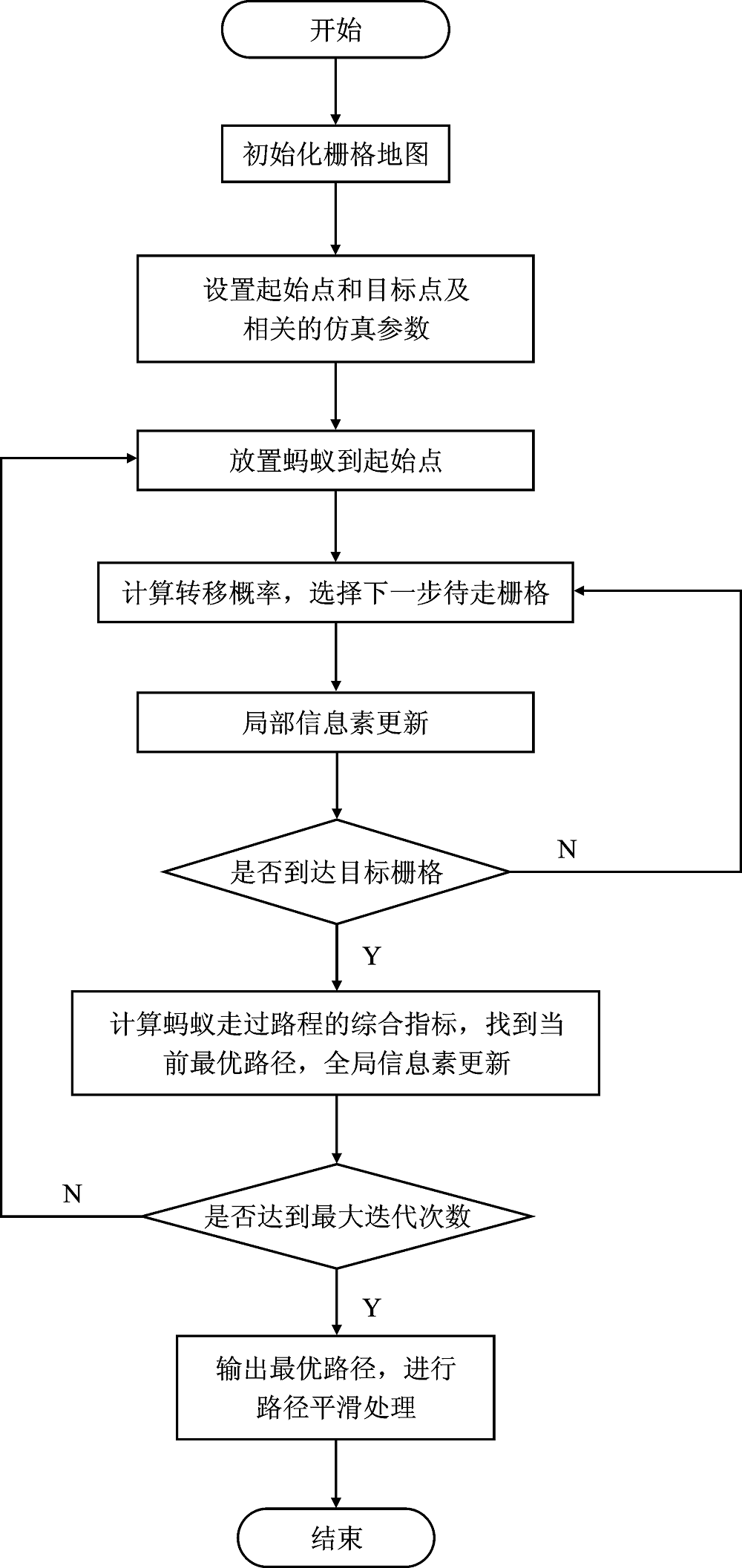
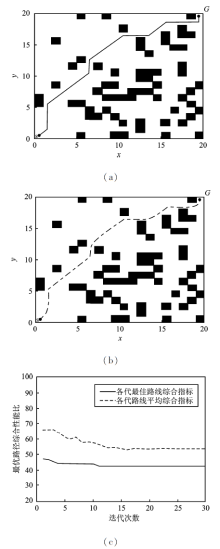
Figure 4.
Optimal path and path smoothing in 20×20 grid map (a)Optimal path simulation of improved algorithm (b)Optimal path simulation after path smoothing (c)Iterative graph of path comprehensive and average comprehensive performance"
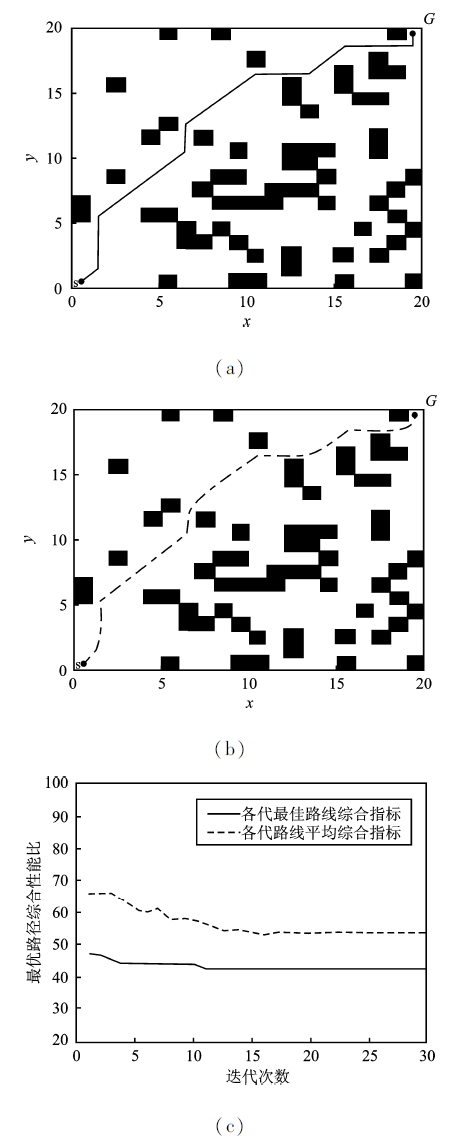

Figure 5.
Simulation results of three algorithms in 30×30 grid map (a)Optimal path comparison graph of three algorithms (b)Optimal path length convergence graph of three algorithms (c)Path steering times convergence graph of three algorithms"
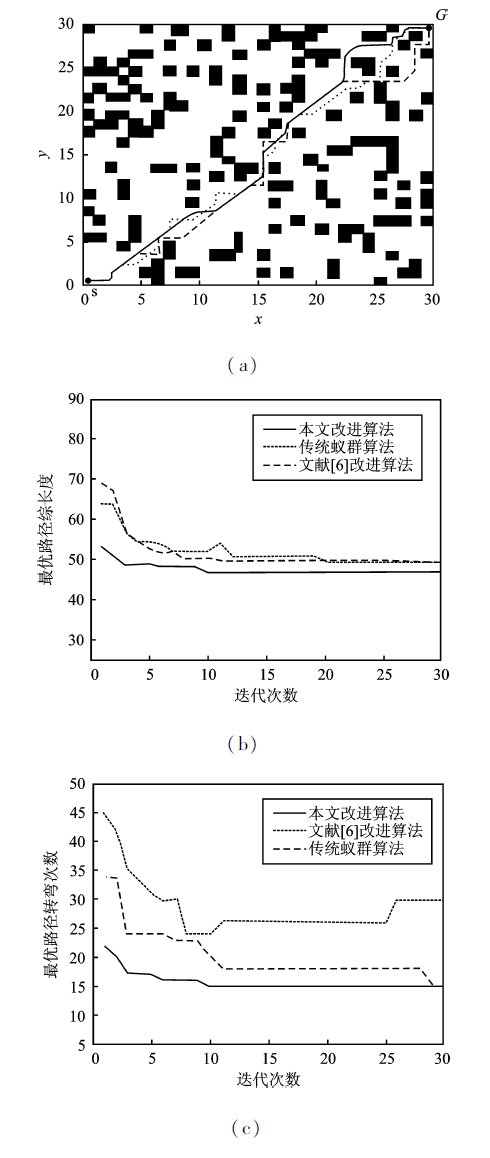
Table 1.
Simulation results of three algorithms in 30×30 grid map"
| 评价指标 | 本文改进算法 | 文献[6]算法 | 传统蚁群算法 |
|---|---|---|---|
| 最优路径长度 | 46.87 | 48.60 | 49.00 |
| 收敛迭代次数 | 10 | 20 | 27 |
| 转弯次数 | 15 | 15 | 30 |
| 运行时间/s | 1.631 | 1.703 | 1.291 |
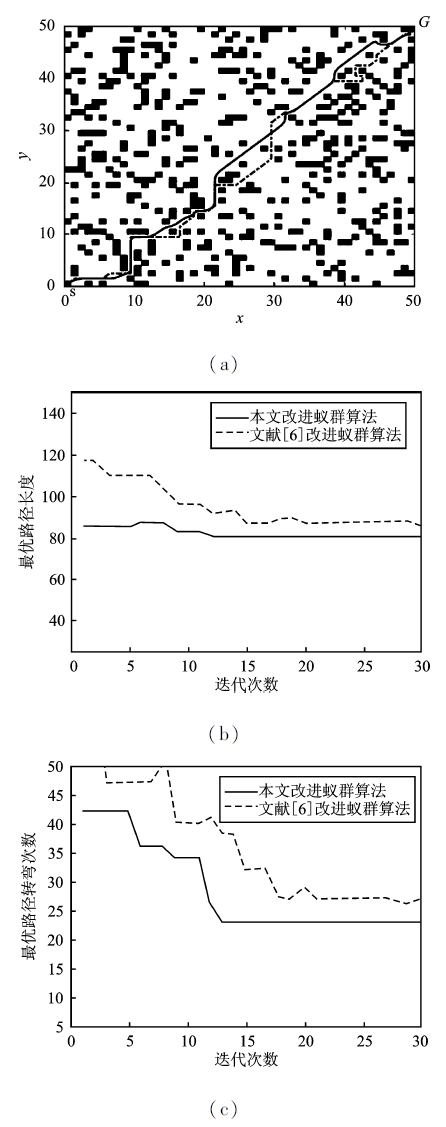
Table 2.
Simulation results of two algorithms in 50×50 grid map"
| 评价指标 | 本文改进算法 | 文献[6]改进算法 |
|---|---|---|
| 最优路径长度 | 81.59 | 86.20 |
| 收敛迭代次数 | 13 | |
| 转弯次数 | 23 | |
| 运行时间/s | 3.082 | 3.007 |
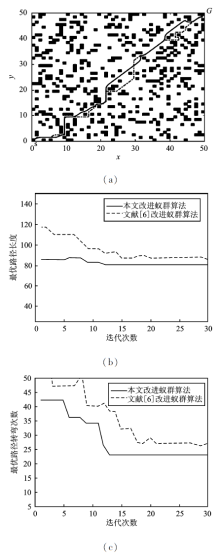
Figure 6.
Simulation results of two algorithms in 50×50 grid map (a)Optimal path comparison graph of two algorithms (b)Optimal path length convergence graph of two algorithms (c)Path steering times convergence graph of two algorithms"
| [1] | 薛飞. 基于无人船的路径规划与避障问题研究[D]. 哈尔滨: 哈尔滨工程大学, 2017. |
| Xue Fei. Research on path planning and obstacle avoidance based on unmanned surface vehicles[D]. Harbin: Harbin Engineering University, 2017. | |
| [2] | 沈海青. 基于强化学习的无人船舶避碰导航及控制[D]. 大连: 大连海事大学, 2018. |
| Shen Haiqing. Collision avoidance navigation and control for unmanned matine vessels based on reinforement learning[D]. Dalian: Dalian Maritime University, 2018. | |
| [3] | 范云生, 柳健, 王国峰, 等. 基于异源信息融合的无人水面艇动态路径规划[J]. 大连海事大学学报, 2018, 44(1):9-16. |
| Fan Yunsheng, Liu Jian, Wang Guofeng, et al. Dynamic path planning for unmanned surface vehicle based on heterologous information fusion[J]. Journal of Dalian Maritime University, 2018, 44(1):9-16. | |
| [4] | 李碧晗. 水面无人艇航迹规划及危险评估研究[D]. 哈尔滨: 哈尔滨工程大学, 2019. |
| Li Bihan. Path planning and risk assessment of unmanned surface vehicle[D]. Harbin: Harbin Engineering University, 2019. | |
| [5] |
朱佳莹, 高茂庭. 融合粒子群与改进蚁群算法的AUV路径规划算法[J]. 计算机工程与应用, 2021, 57(6):267-273.
doi: 10.3778/j.issn.1002-8331.2008-0243 |
|
Zhu Jiaying, Gao Maoting. AUV path planning based on particle swarm optimization and improved ant colony optimization[J]. Computer Engineering and Applications, 2021, 57(6):267-273.
doi: 10.3778/j.issn.1002-8331.2008-0243 |
|
| [6] |
李理, 李鸿, 单宁波. 多启发因素改进蚁群算法的路径规划[J]. 计算机工程与应用, 2019, 55(5):219-225.
doi: 10.3778/j.issn.1002-8331.1805-0175 |
|
Li li, Li Hong, Shan Ningbo. Path planning based on improved ant colony algorithm with multiple inspired factor[J]. Computer Engineering and Applications, 2019, 55(5):219-225.
doi: 10.3778/j.issn.1002-8331.1805-0175 |
|
| [7] |
蓝丹, 樊东红, 陈强, 等. 改进的蚁群算法在智能车辆路径规划中的运用[J]. 组合机床与自动化加工技术, 2021 (4):130-133.
doi: 10.13462/j.cnki.mmtamt.2021.04.031 |
|
Lan Dan, Fan Donghong, Chen Qiang, et al. Application of improved ant colony algorithm in intelligent vehicles path planning[J]. Modular Machine Tool & Automatic Manufacturing Technique, 2021(4):130-133.
doi: 10.13462/j.cnki.mmtamt.2021.04.031 |
|
| [8] | Wu C, Zhou S, Xiao L. Dynamic path planning based on improved ant colony algorithm in traffic congestion[J]. IEEE Access, 2020(8):180773-180783. |
| [9] | 周浩, 曹旭阳, 王殿龙, 等. 基于改进蚁群算法的桥式起重机路径规划问题研究[J]. 机械设计与制造, 2021(4): 133-136. |
| Zhou Hao, Cao Xuyang, Wang Dianlong, et al. Study on path planning of overhead traveling crane based on improved ant colony algorithm[J]. Machinery Design & Manufacture, 2021(4):133-136. | |
| [10] | 王辉, 王景良, 朱龙彪, 等. 基于改进蚁群算法的泊车系统路径规划[J]. 控制工程, 2018, 25(2):253-258. |
| Wang Hui, Wang Jingliang, Zhu Longbiao, et al. Path planning pf parking system based on improved ant colony algorithm[J]. Control Engineering of China, 2018, 25(2):253-258. | |
| [11] |
Zhang Y, Wang F, Fu F, et al. Multi-AGV path planning for indoor factory by using prioritized planning and improved ant algorithm[J]. Journal of Engineering and Technological Sciences, 2018, 50(4):534-547.
doi: 10.5614/j.eng.technol.sci.2018.50.4.6 |
| [12] | 刘学芳, 曾国辉, 黄勃, 等. 基于改进蚁群算法的移动机器人路径规划研究[J]. 电子科技, 2019, 32(9):5-9. |
| Liu Xuefang, Zeng Guohui, Huang Bo, et al. Research on path planing of mobile robot based on improved ant colony algorithm[J]. Electronic Science and Technology, 2019, 32(9):5-9. | |
| [13] |
Lazarowska A. Ship's trajectory planning for collision avoidance at sea based on ant colony optimisation[J]. Journal of Navigation, 2015, 68(2):291-307.
doi: 10.1017/S0373463314000708 |
| [14] | 王晓燕, 杨乐, 张宇, 等. 基于改进势场蚁群算法的机器人路径规划[J]. 控制与决策, 2018, 33(10):1775-1781. |
| Wang Xiaoyan, Yang Le, Zhang Yu, et al. Robot path planning based on improved ant colony algorithm with potential field heuristic[J]. Control and Decision, 2018, 33(10):1775-1781. | |
| [15] | 陈冠宇, 孙鹏, 廖梦琛, 等. 基于全局更新规则蚁群优化的决策实体配置问题求解方法[J]. 计算机应用研究, 2019, 36(10):2977-2981. |
| Chen Guanyu, Sun Peng, Liao Mengchen, et al. Solving method for decision-maker configuration problem based on global updata rule of ant colony algorithm[J]. Application Research of Computers, 2019, 36(10):2977-2981. | |
| [16] | 吕太之, 周武, 赵春霞. 采用粒子群优化和B样条曲线的改进可视图路径规划算法[J]. 华侨大学学报(自然科学版), 2018, 39(1):103-108. |
| Lü Taizhi, Zhou Wu, Zhao Chunxia. Improved visibility graph method using particle swarm optimization and B-spline curve for path planning[J]. Journal of Huaqiao University(Natural Science), 2018, 39(1):103-108. | |
| [17] | 张家旭, 卜纯研, 王晨, 等. 线控四轮转向汽车平行泊车路径规划与跟踪控制[J]. 湖南大学学报(自然科学版), 2021, 48(8):44-50. |
| Zhang Jiaxu, Bu Chunyan, Wang Chen, et al. Parallel parking path planning and tracking control for wire-four-wheel steering vehicle[J]. Journal of Hunan University(Natural Sciences), 2021, 48(8):44-50. | |
| [18] | 汪佳兴, 庄继晖, 程晓鸣, 等. B样条曲线下的MPC轨迹重规划算法[J]. 重庆理工大学学报(自然科学), 2020, 34(4):27-35. |
| Wang Jiaxing, Zhuang Jihui, Cheng Xiaoming, et al. MPC trajectory re-planning algorithm under B-spline curve[J]. Journal of Chongqing University of Technology(Natural Science), 2020, 34(4):27-35. | |
| [19] | 于洋, 周佳伟, 冯迎宾, 等. 基于三次B样条曲线的无人车轨迹优化方法研究[J]. 沈阳理工大学学报, 2019, 38(5): 71-75. |
| Yu Yang, Zhou Jiawei, Feng Yingbin, et al. Research on trajectory optimization of unmanned vehicle based on cubic B-spline interpolation[J]. Journal of Shenyang Ligong Unversity, 2019, 38(5):71-75. |
| [1] | LU Dongxiang. A Survey of Intelligent Transportation Path Planning Algorithms [J]. Electronic Science and Technology, 2022, 35(7): 22-27. |
| [2] | RAN Xianyuan,WANG Ran. Maximizing the Rest Time of Mobile Charger in Rechargeable Probabilistic Sensor Networks [J]. Electronic Science and Technology, 2022, 35(6): 13-20. |
| [3] | YE Hengchao,CHENG Zongmao. Research on Charging Method of Sensor Network Based on Relay Multi-Hop Model [J]. Electronic Science and Technology, 2021, 34(8): 31-36. |
| [4] | SHUI Jiusheng,WANG Ran. A On-Demand Multi-Node Priority Charging Scheduling Algorithm [J]. Electronic Science and Technology, 2021, 34(8): 43-49. |
| [5] | LIU Yongjian,ZENG Guohui,HUANG Bo,LI Xiaobin. Research on Robot Path Planning Based on Improved Ant Colony Algorithm [J]. Electronic Science and Technology, 2020, 33(1): 13-18. |
| [6] | LIU Xuefang,ZENG Guohui,HUANG Bo,LU Dunke. Research on Path Planning of Mobile Robot Based on Improved Ant Colony Algorithm [J]. Electronic Science and Technology, 2019, 32(9): 5-9. |
| [7] | MAO Chenyue,WU Pengyong. UAV Path Planning Obstacle Avoidance Algorithm Based on Artificial Potential Field Method [J]. Electronic Science and Technology, 2019, 32(7): 65-70. |
| [8] | HU Huimian. An Improved Path Planning Algorithm With Variable Probability Bidirectional RRT [J]. Electronic Science and Technology, 2019, 32(6): 16-21. |
| [9] | ZHAO Wei,ZENG Guohui,HUANG Bo,ZHU Shuangxin,LIU Jin. 3D Space Path Planning Research Based on Improved Local Search Algorithm [J]. Electronic Science and Technology, 2019, 32(6): 58-63. |
| [10] | YUE Xiu,ZHANG Wei. UAV Path Planning Based on Intelligent Algorithm [J]. Electronic Science and Technology, 2019, 32(2): 9-13. |
| [11] | XIA Lingru,SUN Shouqun. Planning Route for UAV Cooperative Combat [J]. , 2018, 31(1): 4-. |
| [12] | WANG Zhilong,SHEN Jingfeng. Based on The Regional Coverage of Cleaning Robot Path Planning [J]. , 2017, 30(9): 68-. |
| [13] | ZHANG Chen, YOU Xiaoming. Improved Quantum ant Colony Algorithm of Path Planning for Mobile Robot Based on Grid Model [J]. , 2016, 29(7): 1-. |
| [14] | LIAN Xiaoping,WU Zi'an,KANG Huiqiong. Call Admission Control for OFDMA Systems Based on Ant Colony Algorithm [J]. , 2015, 28(6): 48-. |
| [15] | XIE Yunhong,ZHANG Jumei,XIANG Yang. Key Technology for a Real Time Traffic System Based on the Mobile Internet [J]. , 2015, 28(5): 118-. |
|
