Electronic Science and Technology ›› 2020, Vol. 33 ›› Issue (10): 26-32.doi: 10.16180/j.cnki.issn1007-7820.2020.10.005
Previous Articles Next Articles
ZHANG Kaixiang,CHEN Jiupeng,XIONG Binzhou,LI Qi,Hu Qiongqiong
Received:2019-07-27
Online:2020-10-15
Published:2020-10-20
Supported by:CLC Number:
ZHANG Kaixiang,CHEN Jiupeng,XIONG Binzhou,LI Qi,Hu Qiongqiong. Spatial Trajectory Simulation and Analysis of Industrial Robot[J].Electronic Science and Technology, 2020, 33(10): 26-32.
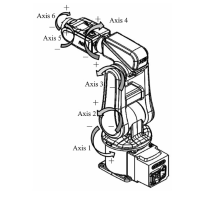
Figure 1.
Structure diagram of ABB_IRB120 robot"
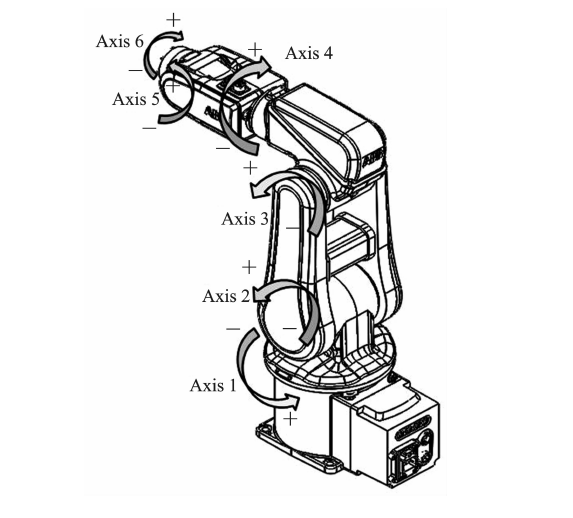
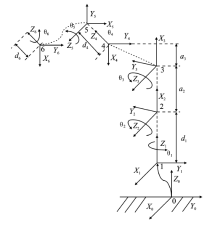
Figure 2.
D-H coordinate system of ABB_IRB120 robot"
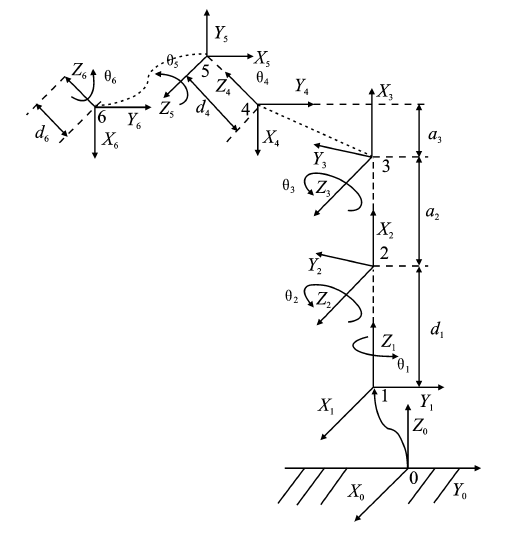
Table 1
Joint D-H parameter table of ABB_IRB120 robot"
| 关节i | αi/(°) | ai/m | di/m | θi/(°) |
|---|---|---|---|---|
| 1 | -90 | 0.00 | 0.290 | θ1 |
| 2 | 0 | 0.27 | 0.000 | θ2 |
| 3 | 90 | 0.07 | 0.000 | θ3 |
| 4 | -90 | 0.00 | 0.302 | θ4 |
| 5 | 90 | 0.00 | 0.000 | θ5 |
| 6 | 0 | 0.00 | 0.072 | θ6 |

Figure 3.
Workspace analysis (a) Point cloud image of work space (b) Point cloud image of X-Z work plane (c)Point cloud image of X-Y work plane"
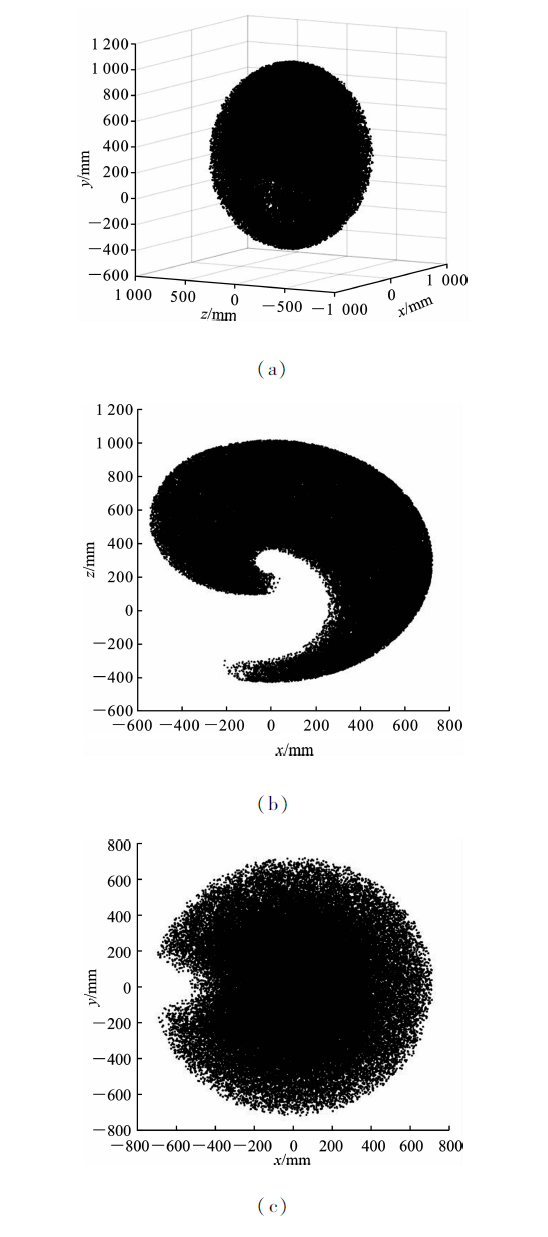
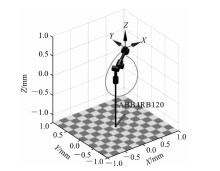
Figure 4.
Two-point trajectory graph"
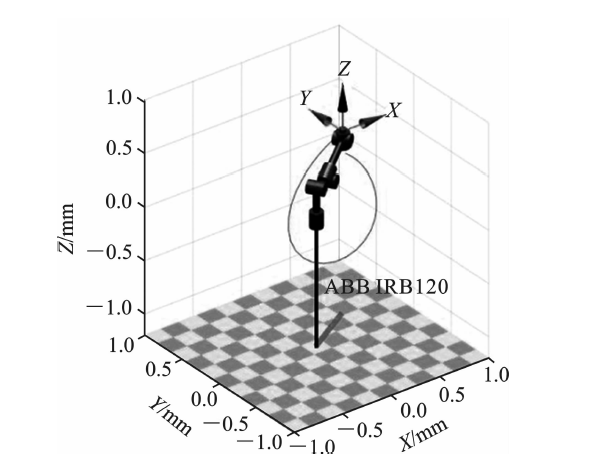
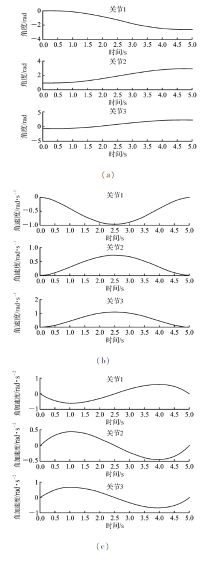
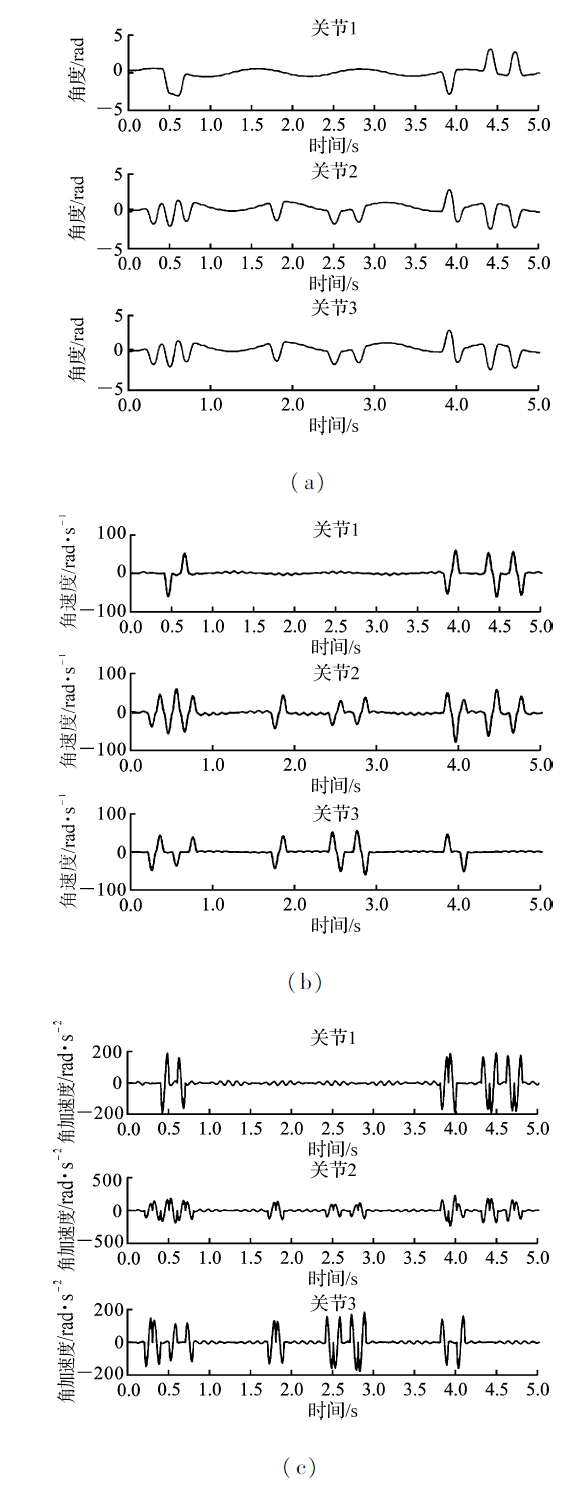
Figure 5.
Joint motion characteristics of trajectories between two points (a) Angle curve of the two-point trajectory (b) Angular velocity curve of the two-point trajectory (c) Angular acceleration curve of a two-point trajectory"
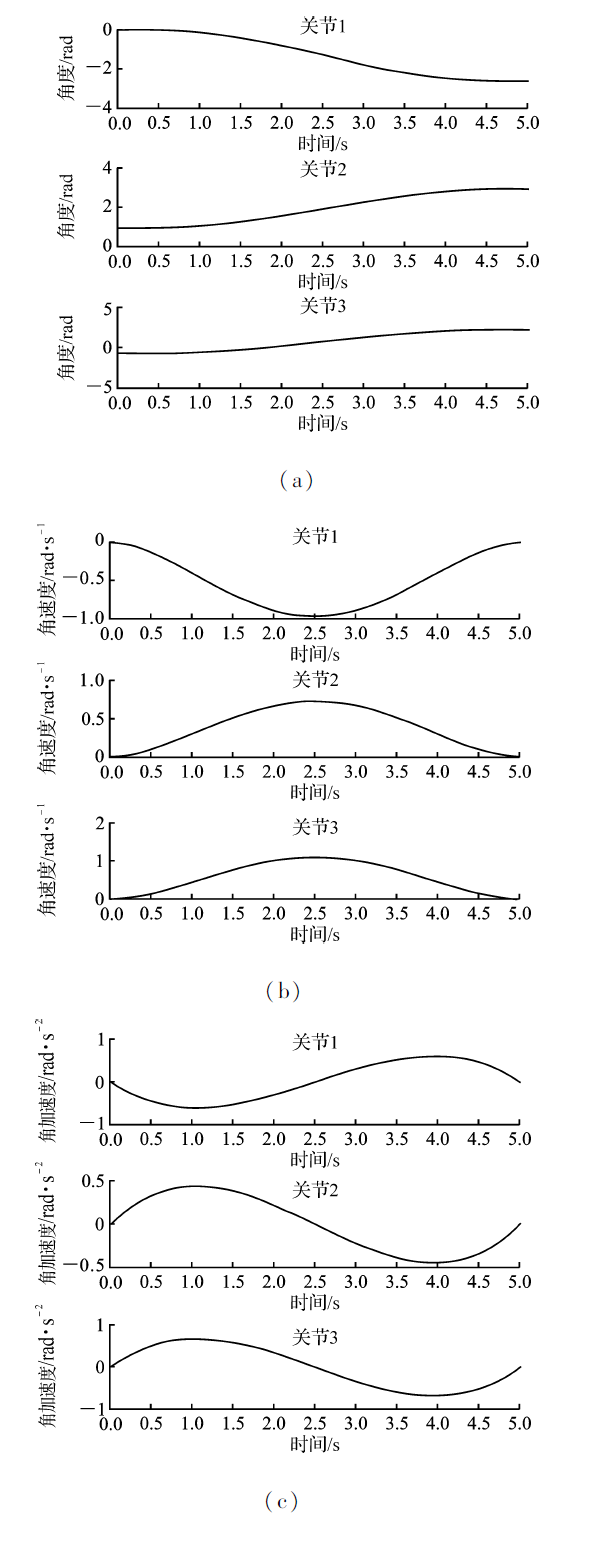
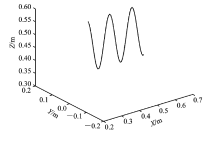
Figure 6.
Target curve-cosine function track"
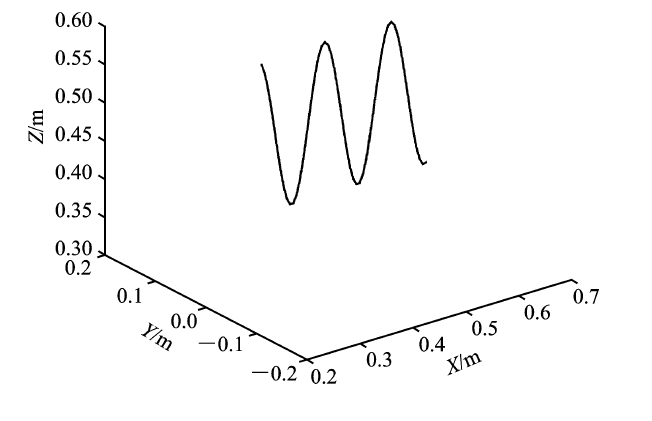
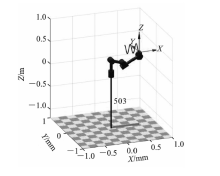
Figure 7.
Generates a cosine function trace"
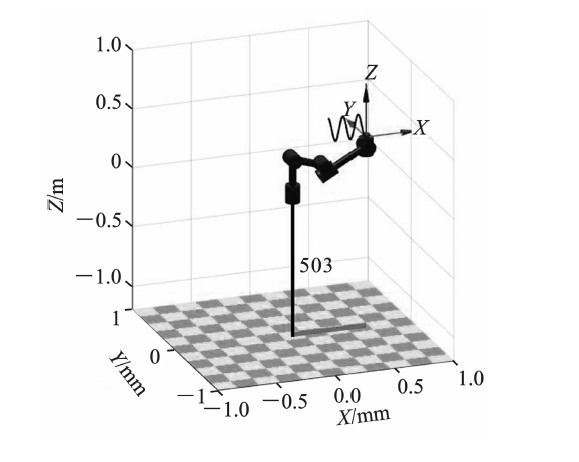
Figure 8.
Joint motion characteristics of the trajectory of cosine function (a) Angle curve of the cosine trajectory (b) Angular velocity curve of the cosine trajectory (c) Angular acceleration curve of the cosine trajectory"
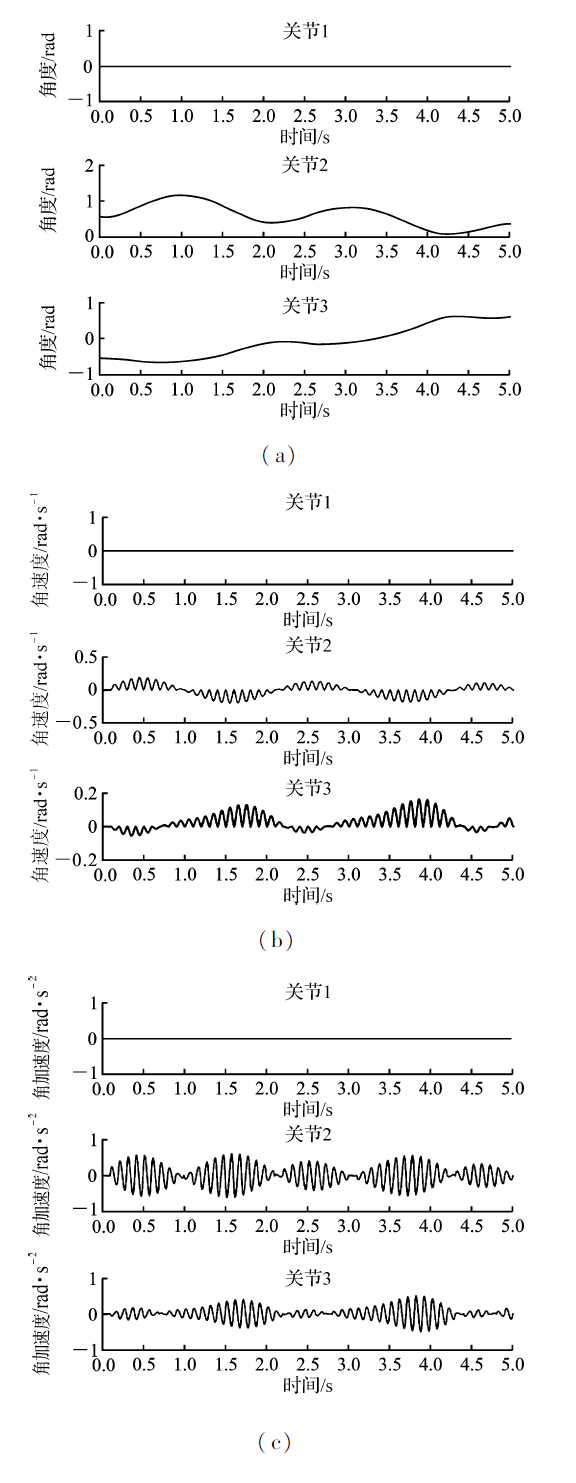
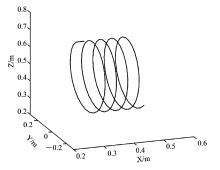
Figure 9.
Spiral curve trajectory"
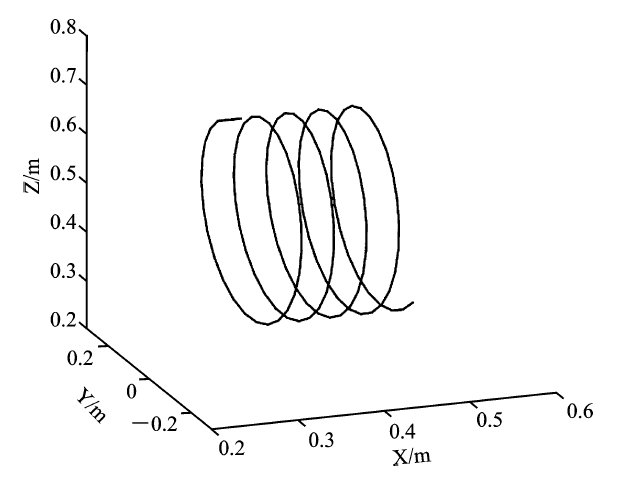
Figure 10.
Generated spiral curve trajectory"
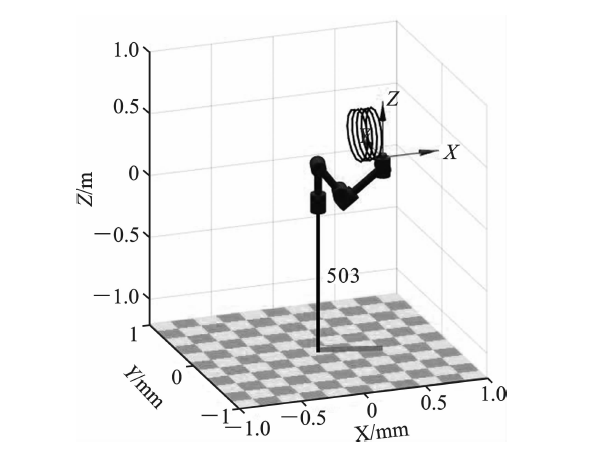
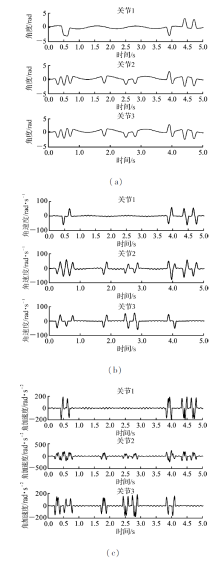
Figure 11.
Joint motion characteristics of spiral trajectory (a) Angle curve of the spiral trajectory (b) Angular velocity curve of a spiral trajectory (c) Angular acceleration curve of aspiral trajectory"
| [1] | 高艺, 马国庆, 于正林, 等. 一种六自由度工业机器人运动学分析及三维可视化仿真[J]. 中国机械工程, 2016,27(13):1726-1731. |
| Gao Yi, Ma Guoqing, Yu Zhenglin, et al. Kinematics analysis of an 6-DOF industrial robot and its 3D visualization simulation[J]. China Mechanical Engineering, 2016,27(13):1726-1731. | |
| [2] | 谢斌, 蔡自兴. 基于MATLAB Robotics Toolbox的机器人学仿真实验教学[J]. 计算机教育, 2010,19(10):140-143. |
| Xie Bin, Cai Zixing. Simulation experimental teaching of robotics based on MATLAB Robotics Toolbox[J]. Computer Education, 2010,19(10):140-143. | |
| [3] |
Mineo C, Pierce S G, Nicholson P I, et al. Robotic path planning for non-destructive testing-A custom MATLAB toolbox approach[J]. Robotics and Computer-Integrated Manufacturing, 2016,37(7):1-12.
doi: 10.1016/j.rcim.2015.05.003 |
| [4] |
Sharifi M, Chen X Q, Pretty C, et al. Modelling and simulation of a non-holonomic omnidirectional mobile robot for offline programming and system performance analysis[J]. Simulation Modelling Practice and Theory, 2018,87(3):155-169.
doi: 10.1016/j.simpat.2018.06.005 |
| [5] | Ma W, Gao G, Zhao J. Kinematics modelling and trajectory planning for an industrial robot[C]. Guiyang:The Tenth International Conference on Modelling, Identification and Control, 2018. |
| [6] |
Kaltsoukalas K, Makris S, Chryssolouris G. On generating the motion of industrial robot manipulators[J]. Robotics and Computer-Integrated Manufacturing, 2015,32(4):65-71.
doi: 10.1016/j.rcim.2014.10.002 |
| [7] |
甘亚辉, 戴先中. 一种高效的开放式关节型机器人3D仿真环境构建方法[J]. 机器人, 2012,34(5):628-633.
doi: 10.3724/SP.J.1218.2012.00628 |
|
Gan Yahui, Dai Xianzhong. An efficient method of constructing open 3D simulation environment[J]. Robot, 2012,34(5):628-633.
doi: 10.3724/SP.J.1218.2012.00628 |
|
| [8] | 罗家佳, 胡国清. 基于MATLAB的机器人运动仿真研究[J]. 厦门大学学报(自然科学版), 2005,44(5):640-644. |
| Luo Jiajia, Hu Guoqing. Study on the simulation of robot motion based on MATLAB[J]. Journal of Xiamen University (Natural Science), 2005,44(5):640-644. | |
| [9] | 李瑞峰, 马国庆. 基于MATLAB仿人机器人双臂运动特性分析[J]. 华中科技大学学报(自然科学版), 2013,41(z1):343-347. |
| Li Ruifeng, Ma Guoqing. Dual-arm kinematic characteristics analysis of humanoid robot based on MATLAB[J]. Journal of Huazhong University of Science and Technology(Natural Science Edition), 2013,41(z1):343-347. | |
| [10] | Dana K, Elizabeth A C. Real-time safety for human-robot interaction[J]. Robotics and Autonomous Systems, 2005,54(1):691-703. |
| [11] | Chen Jiupeng, San Hongjun, Wu Xing, et al. Structural design and characteristic analysis for a 4 degree of freedom parallel manipulator[J]. Advances in Mechanical Engineering, 2019,11(5):1-12. |
| [12] | 宋修洋, 陈劲杰, 余洁. 基于D-H方法建立抛光机器人的运动学模型[J]. 电子科技, 2017,30(6):50-53. |
| Song Xiuyang, Chen Jinjie, Yu Jie. Polishing robot kinematics model based on the D-H method[J]. Electronic Science and Technology, 2017,30(6):50-53. | |
| [13] | ABB. Products manual IRB 120[M]. Sweden:ABB Automation Technology Products ABB Robtics, 2012. |
| [14] |
Guo S, He Y, Shi L, et al. Modeling and experimental evaluation of an improved amphibious robot with compact structure[J]. Robotics and Computer-Integrated Manufacturing, 2018,51(2):37-52.
doi: 10.1016/j.rcim.2017.11.009 |
| [15] | Murray R M. A mathematical introduction to robotic manipulation[M]. Boca Raton: CRC Press, 2017. |
| [16] | Corke P I. A robotics toolbox for MATLAB[J]. IEEE Robotics & Automation Magazine, 1996,3(1):24-32. |
| [17] | 郭希娟, 耿清甲. 串联机器人加速度性能指标分析[J]. 机械工程学报, 2008,44(9):56-60. |
| Guo Xijuan, Geng Qingjia. Analysis for acceleration performance indices of serial robots[J]. Chinese Journal of Mechanical Engineering, 2008,44(9):56-60. | |
| [18] |
王其军, 杜建军. MOTOMAN机器人逆运动学新分析[J]. 哈尔滨工业大学学报, 2010,42(3):451-454.
doi: 10.11918/j.issn.0367-6234.2010.03.026 |
|
Wang Qijun, Du Jianjun. A new solution for inverse kinematics problems of MOTOMAN robot[J]. Journal of Harbin Institute of Technology, 2010,42(3):451-454.
doi: 10.11918/j.issn.0367-6234.2010.03.026 |
| [1] | ZHANG Qi,LI Zhongwen,YU Zhishui. An Overview of the Process and Research on the Preparation of FeNiMoCoCrTi High Entropy Alloys by Fiber Laser [J]. Electronic Science and Technology, 2021, 34(7): 67-72. |
| [2] | HU Qiongqiong,SAN Hongjun,CHEN Jiupeng,XIE Feiya,CHEN Zhongping,LI Pengyu. Motions Analysis and Simulation of a Parallel Robot with Four Degrees of Freedom [J]. Electronic Science and Technology, 2021, 34(11): 46-54. |
| [3] | CHEN Mingfang,ZHANG Kaixiang,CHEN Jiupeng,XIONG Bingzhou,LI Qi,YAO Guoyi,LI Pengyu. Simulation and Optimization of Quadruped Robot Trajectory Based on MATLAB Robotics Toolbox [J]. Electronic Science and Technology, 2020, 33(9): 31-37. |
| [4] | HAN Qiang,LI Changhao,CHENG Jianpeng,ZHANG Xiliang,LI Boquan,YIN Jingtian. Research on Double Closed Loop Control of Laser Attitude and Angle Sliding Mode of Crane Orbit Detection Robot [J]. Electronic Science and Technology, 2020, 33(7): 17-21. |
| [5] | CHEN Jiupeng,SAN Hongjun,ZHANG Daoyi,HU Qiongqiong,ZHANG Kaixiang,XIONG Binzhou. Diagonal Gait Simulation Analysis of a Quadruped Robot [J]. Electronic Science and Technology, 2020, 33(5): 33-38. |
| [6] | ZHANG Daoyi,SAN Hongjun,CHEN Jiupeng,LI Pengfei,XIONG Binzhou. Velocity Kinematics Analysis and Simulation of 5-DOF Hybrid Engraving Machine [J]. Electronic Science and Technology, 2020, 33(4): 42-49. |
| [7] | LIU Yongjian,ZENG Guohui,HUANG Bo,LI Xiaobin. Research on Robot Path Planning Based on Improved Ant Colony Algorithm [J]. Electronic Science and Technology, 2020, 33(1): 13-18. |
| [8] | LIU Xuefang,ZENG Guohui,HUANG Bo,LU Dunke. Research on Path Planning of Mobile Robot Based on Improved Ant Colony Algorithm [J]. Electronic Science and Technology, 2019, 32(9): 5-9. |
| [9] | LI Mengfan,ZOU Zihao,SHU Fandi. Research on Fault Tree Analysis Method for Hybrid Uncertainties Using Stochastic Logic Implemented on Field-programmable Gate Arrays [J]. Electronic Science and Technology, 2019, 32(4): 6-10. |
| [10] | HAO Jiajun,WANG Yagang,MA Jiangtao. Master-slave Control System Simulation of Surgical Robot Based on LabVIEW [J]. Electronic Science and Technology, 2019, 32(2): 14-19. |
| [11] | CHEN Jiupeng,SAN Hongjun,LI Pengfei,ZHANG Daoyi,XIONG Binzhou. Kinematics Analysis and Simulation for a Novel 5-DOF Serial-Parallel Robot [J]. Electronic Science and Technology, 2019, 32(12): 37-43. |
| [12] | YANG Yunhui. Research on Workpiece Location Technology Based on Monocular Vision [J]. Electronic Science and Technology, 2019, 32(12): 72-75. |
| [13] | GAO Fei,DING Xueming,LI Jian. Design and Implementation of A Small Intelligent Mowing Robot [J]. , 2018, 31(4): 68-. |
| [14] | ZHAO Hailin,QIAN Wei,SUN Fujia. Research of Articulated Robot Motion Simulation Based on V-REP [J]. , 2017, 30(4): 53-. |
| [15] | DONG Qi 1,2,3,4 ,YU Hongliu 1,2,3,4 ,FANG Youfang 1,2,3,4 . Design of a Torque Control System for the Upper Limb Rehabilitation Robot [J]. , 2017, 30(4): 136-. |
|
