Electronic Science and Technology ›› 2021, Vol. 34 ›› Issue (10): 8-10.doi: 10.16180/j.cnki.issn1007-7820.2021.10.002
Previous Articles Next Articles
CUI Bo,FANG Lingli,JIANG Quan,BI Chao
Received:2020-06-16
Online:2021-10-15
Published:2021-10-18
Supported by:CLC Number:
CUI Bo,FANG Lingli,JIANG Quan,BI Chao. A Comparative Study of High-Speed Position Sensorless Control Technology in Surface Mounted Permanent Magnet Synchronous Motors[J].Electronic Science and Technology, 2021, 34(10): 8-10.
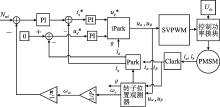
Figure 1.
Block diagram of position sensorless control system of PMSM"
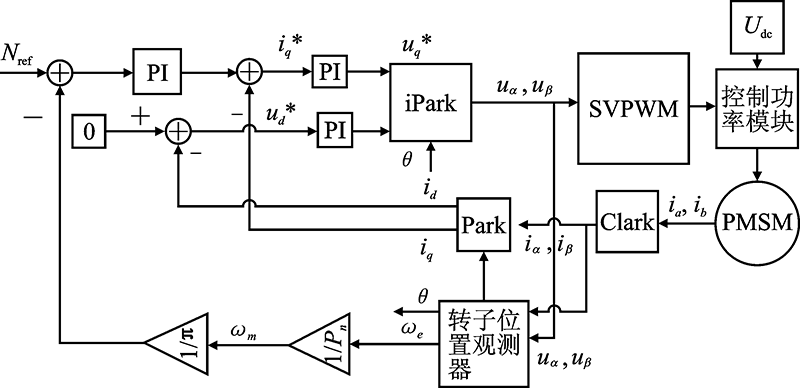
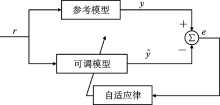
Figure 2.
Parallel MRAS schematic"
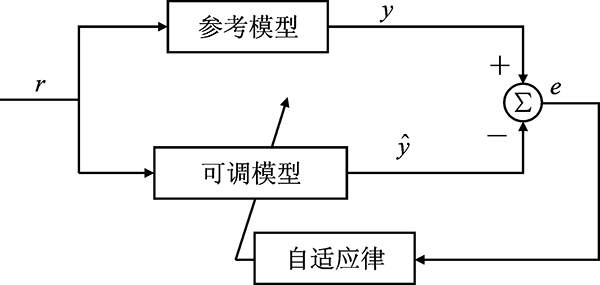
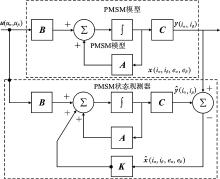
Figure 3.
Block diagram of PMSM model and observer"
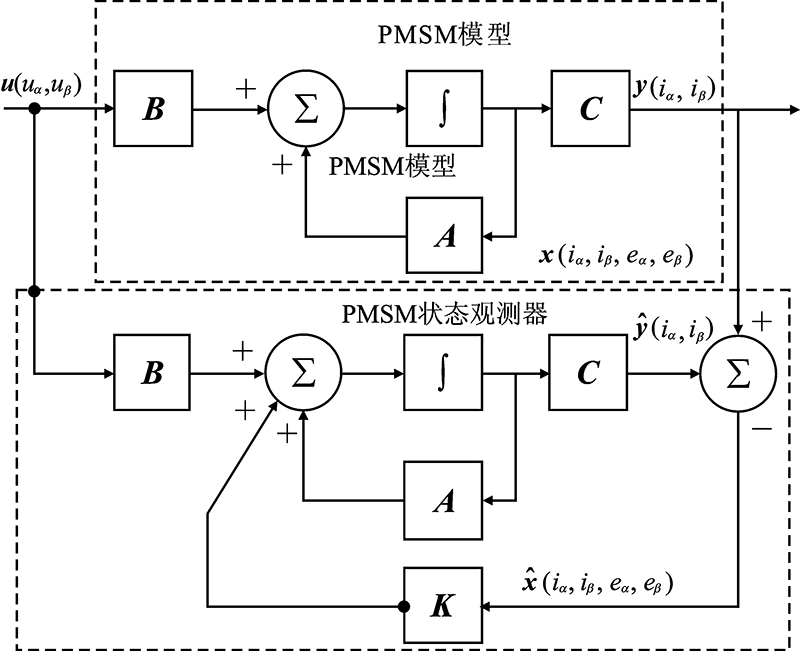
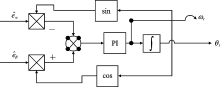
Figure 4.
Block diagram of phase-locked loop"
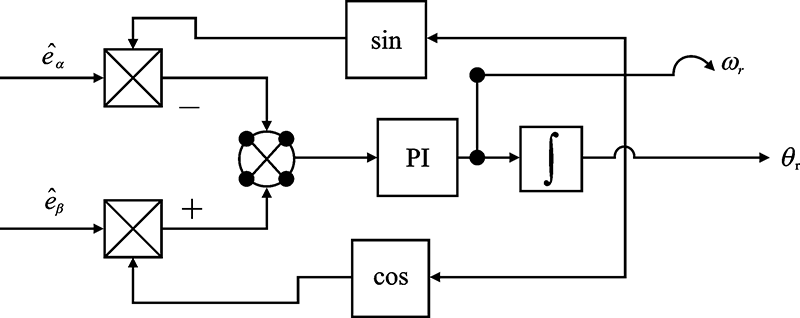
Figure 5.
Simulation speed setting"
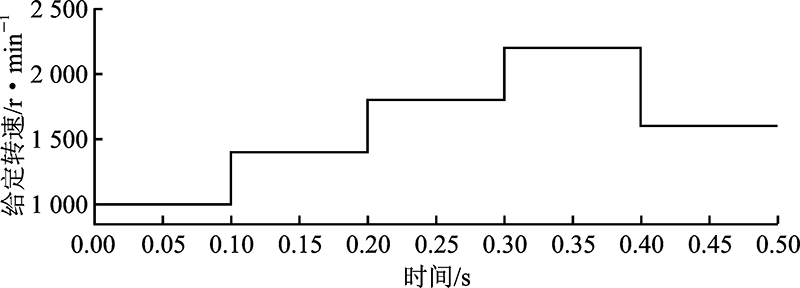
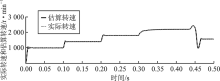
Figure 6.
Estimated speed and actual speed of SMO observer"

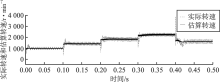
Figure 7.
Estimated speed and actual speed of MRAS observer"
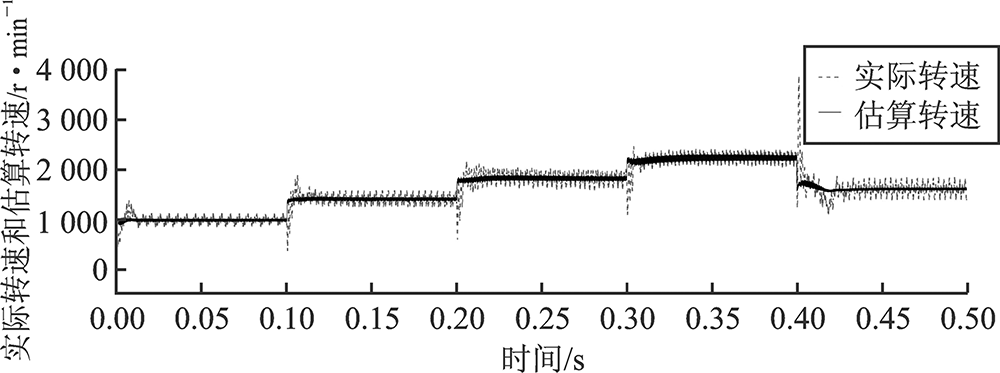
Figure 8.
Estimated speed error of SMO observer"
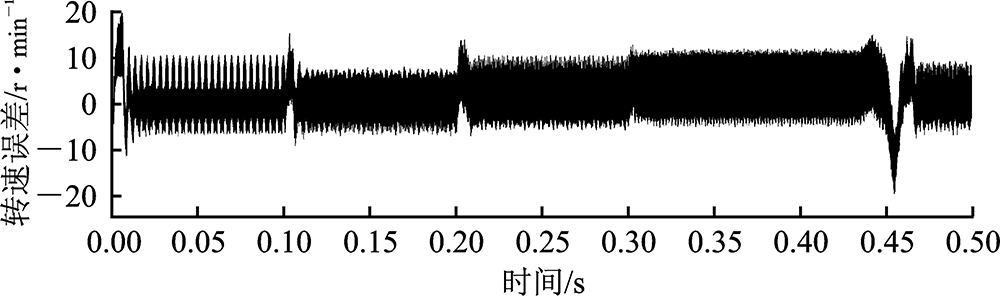

Figure 9.
Estimated speed error of MRAS observer"
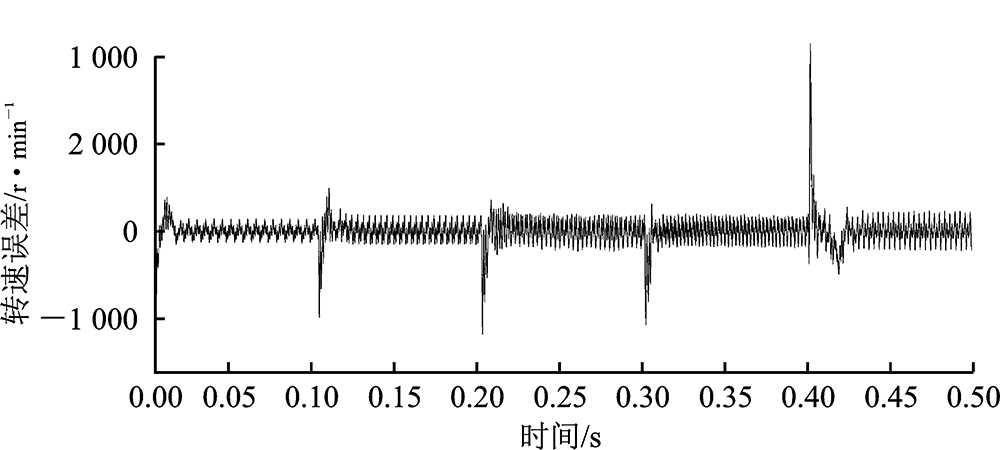
Figure 10.
Estimated rotor position and actual rotor position of SMO observer"
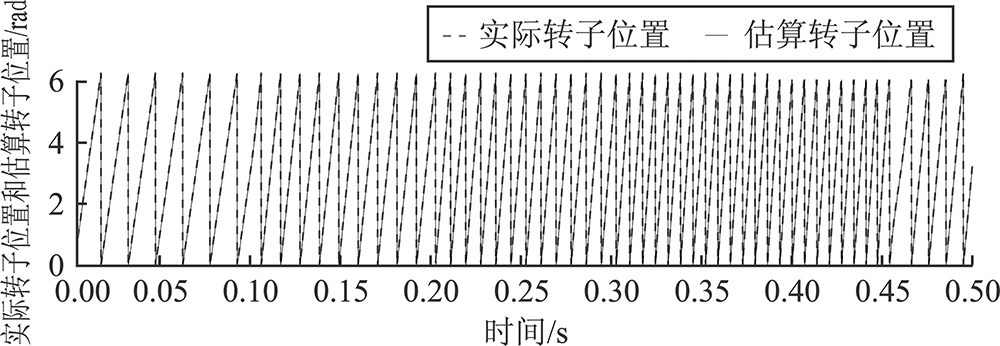
Figure 11.
Estimated rotor position and actual rotor position of MRAS observer"
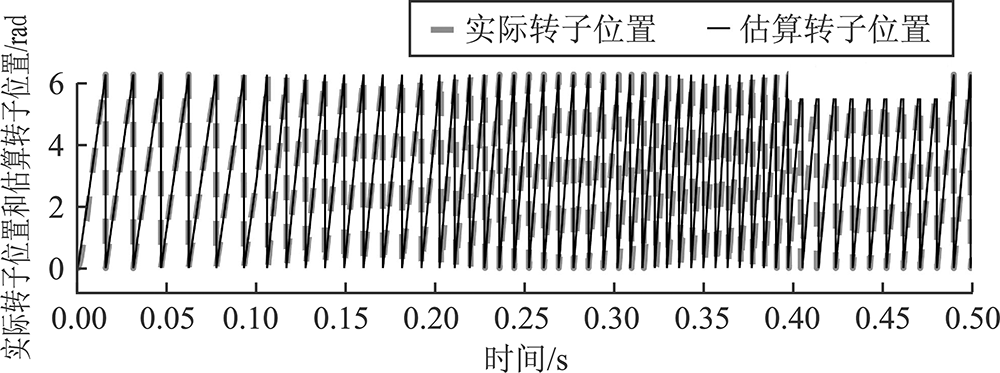
Figure 12.
Estimated rotor position error of SMO observer"
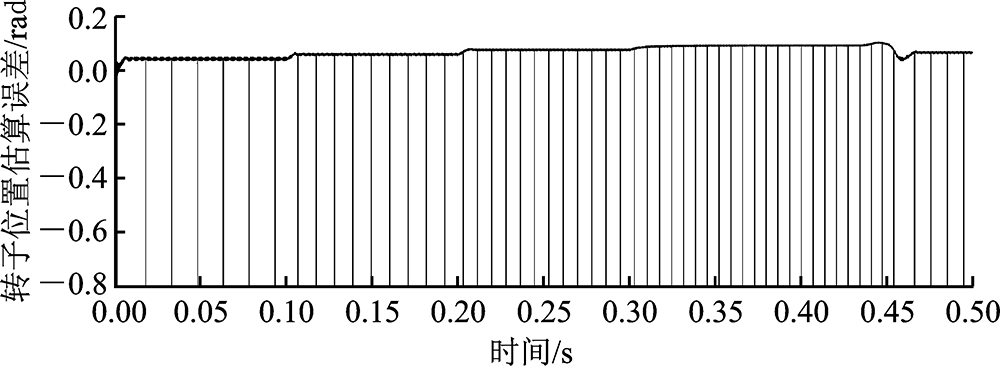
Figure 13.
Estimated rotor position error of MRAS observer"
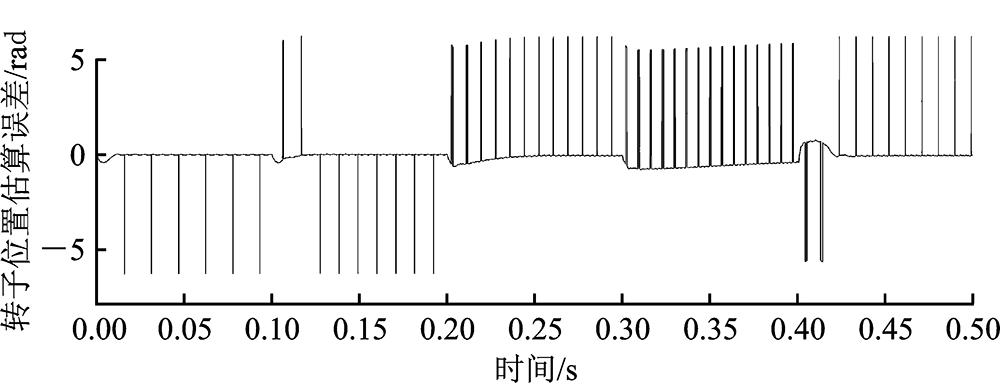
Table 1
Speed steady-state estimation error at different speeds for SMO and MRAS/r·min-1"
| 转速 估算算法 | 1 000 | 1 400 | 1 800 | 2 200 | 1 600 |
|---|---|---|---|---|---|
| SMO | 10 | 8 | 10 | 11 | 9 |
| MRAS | 60 | 80 | 120 | 150 | 190 |
Table 2
Errors in estimating rotor position at different speeds in SMO and MRAS"
| 转速/r·min-1 估算算法 | 1 000 | 1 400 | 1 800 | 2 200 | 1 600 |
|---|---|---|---|---|---|
| SMO | 0.050 rad | 0.060 rad | 0.075 rad | 0.090 rad | 0.065 rad |
| MRAS | 0.400 rad | 0.030 rad | 0.030 rad | 0.600 rad | 0.050 rad |
Figure 14.
Estimation speed and actual speed of Luenberger observer"
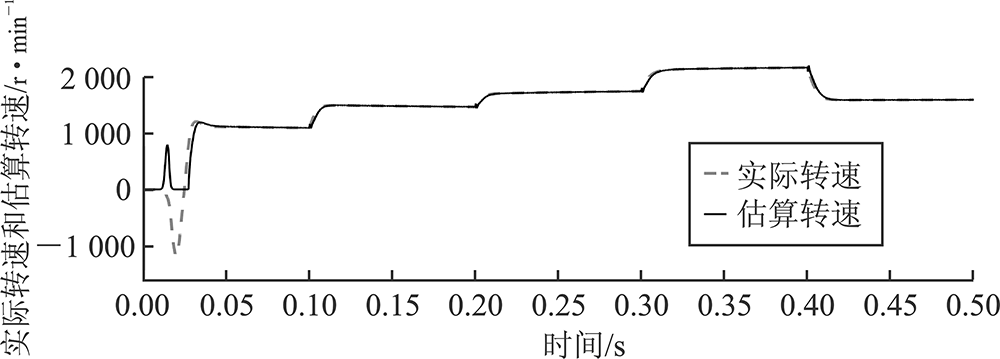
Figure 15.
Estimation speed error of Luenberger observer"
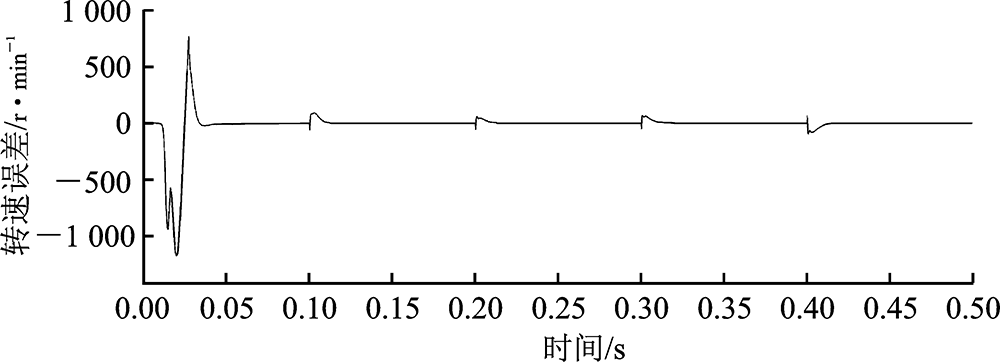
Table 3
Speed steady-state estimation error at different speeds for SMO and Luenberger/r·min-1"
| 转速 估算算法 | 1 000 | 1 400 | 1 800 | 2 200 | 1 600 | ||||
|---|---|---|---|---|---|---|---|---|---|
| SMO | 10 | 8 | 10 | 11 | 9 | ||||
| LUO | 4 | 2 | 5 | 6 | 0 | ||||
Table 4
Estimation error of speed switching point dynamics at different speeds of SMO and Luenberger/r·min-1"
| 转速 估算算法 | 1 400 | 1 800 | 2 200 | 1 600 |
|---|---|---|---|---|
| SMO | 16 | 14 | 14 | 15 |
| LUO | 100 | 50 | 60 | -80 |
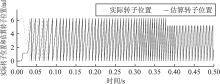
Figure 16.
Estimation rotor position and actual rotor position of Luenberger observer"
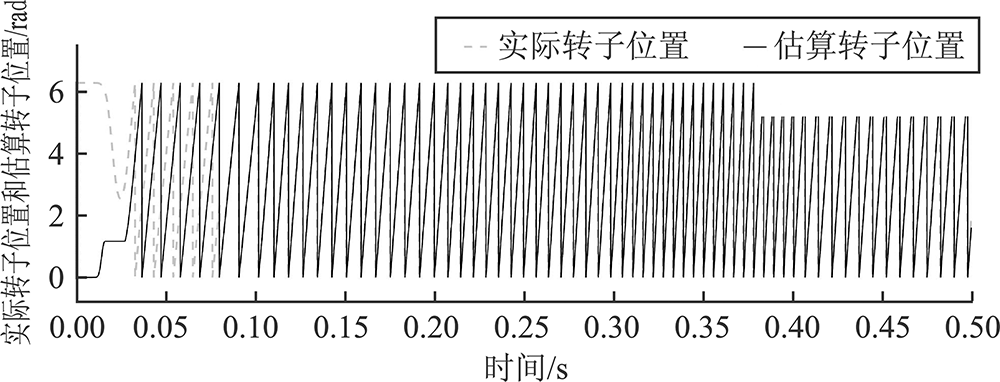
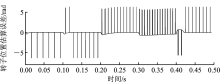
Figure 17.
Estimation error of rotor position in Luenberger observer"
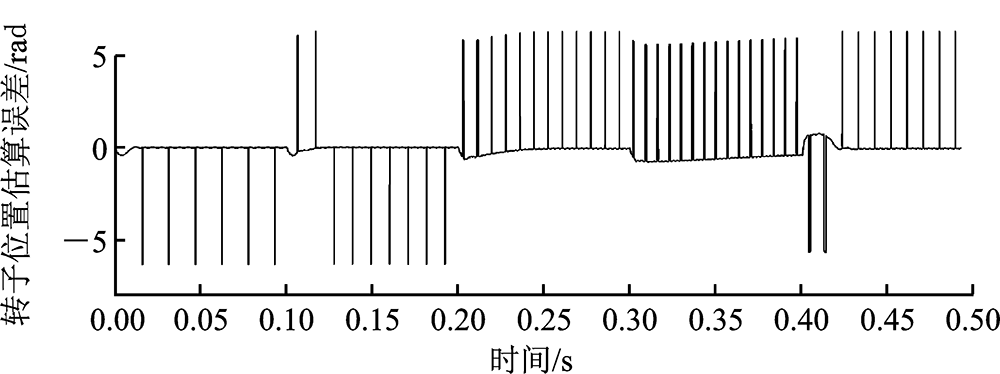
Table 5
Estimation error of rotor position at different speeds in SMO and Luenberger"
| 转速/r·min-1 估算算法 | 1 000 | 1 400 | 1 800 | 2 200 | 1 600 |
|---|---|---|---|---|---|
| SMO | 0.050 rad | 0.060 rad | 0.075 rad | 0.090 rad | 0.065 rad |
| LUO | 0.100 rad | 0.200 rad | 0.260 rad | 0.370 rad | 0.220 rad |
Table 6
Speed steady-state estimation error at different speeds for MRAS and Luenberger/r·min-1"
| 转速 估算算法 | 1 000 | 1 400 | 1 800 | 2 200 | 1 600 | ||||
|---|---|---|---|---|---|---|---|---|---|
| MRAS | 60 | 80 | 120 | 150 | 190 | ||||
| LUO | 4 | 2 | 5 | 6 | 0 | ||||
Table 7
Estimation error of rotor position at different speeds in MRAS and Luenberge"
| 转速/r·min-1 估算算法 | 1 000 | 1 400 | 1 800 | 2 200 | 1 600 |
|---|---|---|---|---|---|
| MRAS | 0.40 rad | 0.02 rad | 0.02 rad | 0.60 rad | 0.05 rad |
| LU | 0.10 rad | 0.20 rad | 0.26 rad | 0.37 rad | 0.22 rad |
| [1] | 刘计龙, 肖飞, 沈洋, 等. 永磁同步电机无位置传感器控制技术研究综述[J]. 电工技术学报, 2017, 32(16):76-88. |
| Liu Jilong, Xiao Fei, Shen Yang, et al. Position-sensorless control technology of permanent-magnet synchronous motor-a review[J]. Transactions of China Electrotechnical Society, 2017, 32(16):76-78. | |
| [2] | 刘家曦, 李铁才, 杨贵杰. 永磁同步电机转子位置与速度预估[J]. 电机与控制学报, 2009, 13(5):690-694. |
| Liu Jiaxi, Li Tiecai, Yang Guijie. Rotor position and speed estimation for PMSM[J]. Electric Machines and Control, 2009, 13(5):690-694. | |
| [3] | Pan F, Yan G L, Qin G F. Research on new sensorless control strategy of surface mounted PMSM [C].Nanjing:The Thirty-third Youth Academic Annual Conference of Chinese Association of Automation, 2018. |
| [4] | 柏建勇, 腾青芳, 杜永栋, 等. 永磁同步电机控制策略比较研究[J]. 控制工程, 2015, 22(3):490-494. |
| Bai Jianyong, Teng Qingfang, Du Yongdong, et al. Comparison of control strategies for permanent magnet synchronous motor[J]. Control Engineering of China, 2015, 22(3):490-494. | |
| [5] | 袁雷, 胡冰新, 魏克银, 等. 现代永磁同步电机控制原理及MATLAB仿真[M]. 北京: 北京航空航天大学出版社, 2016. |
| Yuan Lei, Hu Bingxin, Wei Keyin, et al. Control method and MATLAB simulation of modern PMSM[M]. Beijing: Beihang University Press, 2016. | |
| [6] | 王成元, 夏加宽, 杨俊友, 等. 电机现代控制技术[M]. 北京: 机械工业出版社, 2006. |
| Wang Chengyuan, Xia Jiakuan, Yang Junyou, et al. Modern motor control technology[M]. Beijing: China Machine Press, 2006. | |
| [7] | 付莉, 高仕斌, 任晓刚, 等. 基于MRAS的PMSM无传感器矢量控制研究[J]. 电气传动, 2015, 45(10):17-21. |
| Fu Li, Gao Shibin, Ren Xiaogang, et al. Research on speed sensor-less vector control of PMSM based on MRAS[J]. Electric Drive, 2016, 45(10):17-21. | |
| [8] | 禹继贤, 颜钢锋, 张斌. 基于MRAS的永磁同步电机无传感器控制[J]. 机电工程, 2015, 32(9):1222-1228. |
| Yu Jixian, Yan Gangfeng, Zhang Bin. Sensorless control of permanent magnet synchronous motors based on MRAS[J]. Journal of Mechanical & Electrical Engineering, 2015, 32(9):1222-1228. | |
| [9] | Gao W, Guo Z R. Speed sensorless control of PMSM using model reference adaptive system and RBFN[J]. Journal of Networks, 2013, 8(1):213-220. |
| [10] | 时维国, 刘坤亮. 基于MRAS的永磁同步电机无位置传感器控制策略研究[J]. 电机与控制应用, 2019, 46(7):39-44. |
| Shi Weiguo, Liu Kunliang. Research on permanent magnet synchronous motors position sensorless control strategy based on MRAS[J]. Electric Machines & Control Application, 2019, 46(7):39-44. | |
| [11] | Saihi L, Boutera A. Robust sensorless sliding mode control of PMSM with MRAS and Luenberger extended observer [C].Algiers:The Eighth International Conference on Modeling,Identification and Control, 2016. |
| [12] | 姚莹, 李伟, 金海, 等. 基于龙贝格观测器的PMSM无位置传感器控制系统设计[J]. 电子科技, 2020, 33(10):1-7. |
| Yao Ying, Li Wei, Jin Hai, et al. Design of sensorless control system for PMSM based on Luenberger observer[J]. Electronic Science and Technology, 2020, 33(10):1-7. | |
| [13] | Ohara M, Noguchi T. Rotor position sensorless control and its parameter sensitivity of permanent magnet motor based on model reference adaptive system[J]. IEEJ Transactions on Industry Applications, 2012, 132(3):436-436. |
| [14] | 张洪余. 基于模型自适应和滑模观测器PMSM无位置传感器控制对比仿真分析[D]. 长春:吉林大学, 2014. |
| Zhang Hongyu. Comparative simulation analysis ofsensorless control of PMSM based on MRAS and SMO[D]. Changchun:Jilin University, 2014. | |
| [15] | 陈思溢, 皮佑国. 基于滑模观测器与滑模控制器的永磁同步电机无位置传感器控制[J]. 电工技术学报, 2016, 31(12):109-117. |
| Chen Siyi, Pi Youguo. Position sensorless control for permanent magnet synchronous motor based on sliding mode observer and sliding mode controller[J]. Transactions of China Electrotechnical Society, 2016, 31(12):109-117. | |
| [16] | Wu H, Wu J H, Sun Q G, et al. A novel sliding mode observer-based sensorless PMSM control [C].Harbin:The Twenty-second International Conference on Electrical Machines and Systems, 2019. |
| [17] | Hu Q L, Liu L, Zhang C, et al. Researching for sensorless control of PMSM based on a novel sliding mode observer [C].Singapore:The Third IEEE International Conference on Advanced Robotics and Mechatronics, 2018. |
| [18] | Elbuluk M, Li C S. Sliding mode observer for wide-speed sensorless control of PMSM drives [C].Salt Lake City:The Thirty-eighth Annual Meeting of the Industry-Applications-Society, 2003. |
| [1] | YUAN Qingqing,QU Hanfei. Research on Induction Motor Control Based on Improved Sliding Mode Disturbance Observer [J]. Electronic Science and Technology, 2022, 35(2): 59-66. |
| [2] | LI Yifei,JIANG Quan. Research Development of Initial Rotor Position Detection of Permanent Magnet Synchronous Motors [J]. Electronic Science and Technology, 2021, 34(4): 24-33. |
| [3] | ZHOU Tao,JIANG Quan. Overview of Sensorless Control Technology for Full Speed Range Permanent Magnet Synchronous Motors [J]. Electronic Science and Technology, 2021, 34(4): 59-69. |
| [4] | JIANG Kaiwen,JIN Hai,XU Shen. Design and Simulation of High Power Factor PMSM without Electrolytic Capacitor [J]. Electronic Science and Technology, 2021, 34(12): 13-18. |
| [5] | TONG Zhaojing,ZHENG Quan,HAN Yaofei,HE Guofeng,QIN Zini. A Novel Sliding Mode Observer for Position Sensorless Control of Permanent Magnet Synchronous Motor [J]. Electronic Science and Technology, 2021, 34(12): 1-6. |
| [6] | CHEN Shengli,WANG Xinzhang,XU Xiaozhuo. Electromagnetic Simulation Analysis of Permanent Magnet Synchronous Motor Demagnetization Fault [J]. Electronic Science and Technology, 2021, 34(10): 32-37. |
| [7] | ZHU Jun,LI Zihao,LIU Bingchen,MENG Xiangbin,ZHANG Zhe. State Estimation for Permanent Magnet Synchronous Motor Based on Adaptive Interpolation Extended Kalman Filter [J]. Electronic Science and Technology, 2020, 33(5): 66-71. |
| [8] | SHI Xun,YI Yingping,WANG Xiaoli. Research on Flux Weakening Control Technology of Interior Permanent Magnet Synchronous Motor [J]. Electronic Science and Technology, 2020, 33(2): 14-19. |
| [9] | ZHANG Lele,SU Qianmin. Adaptive Sliding Mode Control for Nonlinear Systems with Mismatched Quantization [J]. Electronic Science and Technology, 2020, 33(12): 38-43. |
| [10] | YAO Ying,LI Wei,JIN Hai,GUO Jie. Design of Sensorless Control System for PMSM Based on Luenberger Observer [J]. Electronic Science and Technology, 2020, 33(10): 45-50. |
| [11] | HUANG Song,LI Haijian,SHI Wei. Interior PMSM Sensorless Control Based on Disturbance Observer [J]. Electronic Science and Technology, 2020, 33(1): 57-62. |
| [12] | JI Shengyang,WANG Xudong,XU Xiaozhuo,SUN Weixiang,SHI Kaining. Research on Direct Torque Control of Permanent Magnet Synchronous Motor Based on Sliding Mode Control [J]. Electronic Science and Technology, 2019, 32(7): 1-5. |
| [13] | WANG Yuesheng,LI Wei. Design of Voice Coil Motor Position Control System Based on PID Algorithm [J]. Electronic Science and Technology, 2019, 32(7): 76-81. |
| [14] | SUN Ruining,DING Yiming,LIANG Jintao. Deadbeat Direct Torque Control of Permanent Magnet Synchronous Motor Based on Full-Dimensional State Observer [J]. Electronic Science and Technology, 2019, 32(4): 72-76. |
| [15] | JI Chuankun,QIAN Junbing. Vector Control System of PMSM Based on Repetitive Synovial Control [J]. Electronic Science and Technology, 2019, 32(1): 52-57. |
|
