Electronic Science and Technology ›› 2022, Vol. 35 ›› Issue (2): 59-66.doi: 10.16180/j.cnki.issn1007-7820.2022.02.010
Previous Articles Next Articles
YUAN Qingqing,QU Hanfei
Received:2020-10-26
Online:2022-02-15
Published:2022-02-24
Supported by:CLC Number:
YUAN Qingqing,QU Hanfei. Research on Induction Motor Control Based on Improved Sliding Mode Disturbance Observer[J].Electronic Science and Technology, 2022, 35(2): 59-66.
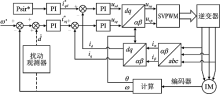
Figure 1.
Block diagram of FOC-based induction motor control"
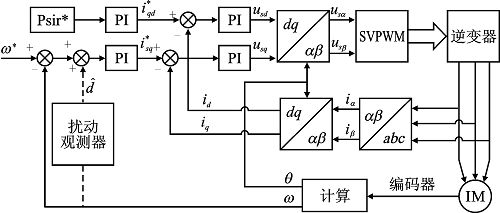

Figure 2.
Simplified diagram of the speed loop based on PI control"
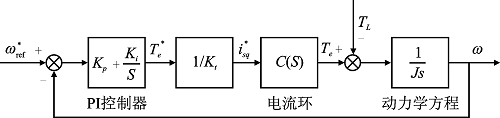
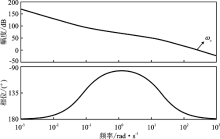
Figure 3.
Bode diagram of system transfer function"
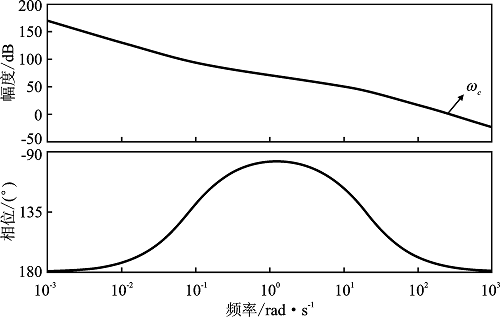
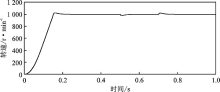
Figure 4.
The speed waveform at start and the speed waveform at loading and unloading"
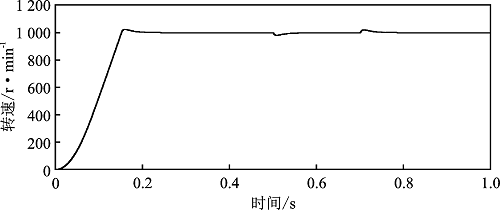
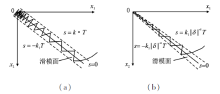
Figure 5.
Trajectory equations of constant velocity approach law and improved approach law (a)Law of constant velocity approach (b)Improved approach law"
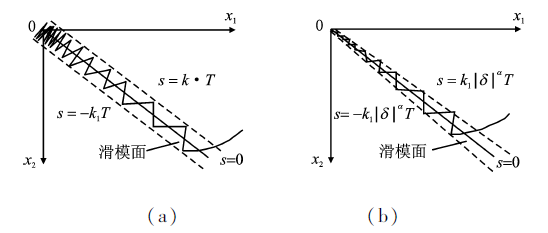
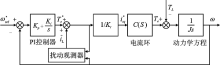
Figure 6.
Simplified diagram of speed loop based on improved PI control"
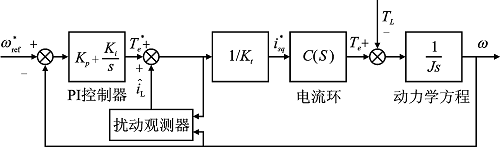
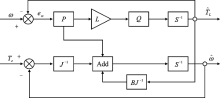
Figure 7.
Block diagram of sliding mode disturbance observer"
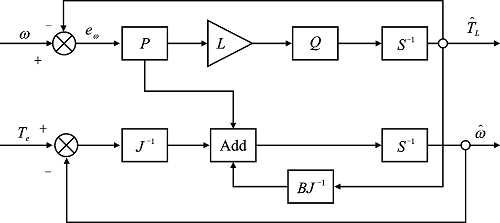
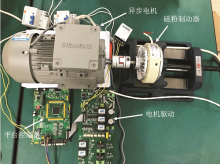
Figure 8.
Motor experiment platform"

Table 1
IM motor parameters"
| 参数 | 数值 |
|---|---|
| 额定功率Pn | 1.49 kW |
| 额定电压Vn | 380 V |
| 额定速度ω* | 1 000 r·min-1 |
| 极对数np | 2 |
| 转子电阻Rr | 1.218 Ω |
| 定子电阻Rs | 0.624 Ω |
| 转动惯量J | 1.2×10-4 kg·m2 |
Figure 9.
Experimental results of traditional disturbance observer with disturbance feed forward compensation (a)Speed waveform during starting (b)Speed waveform during loading and unloading (c)Given load and observed torque waveform"
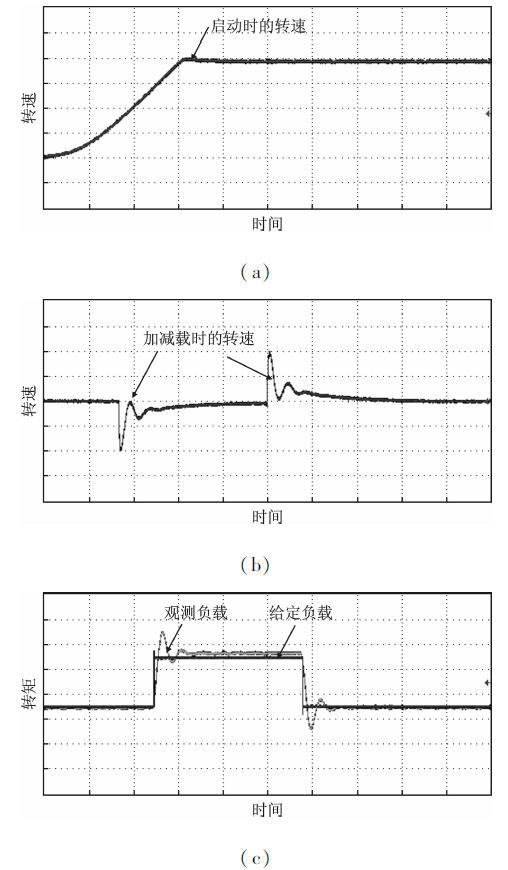
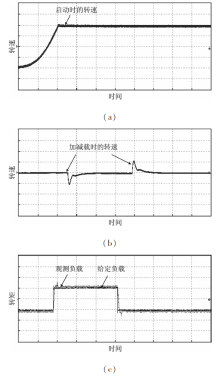
Figure 10.
Experimental results of improved disturbance observer with disturbance feed forward compensation (a)Speed waveform at no-load starting (b)Speed waveform during sudden increase and sudden decrease (c)Observed torque waveform"
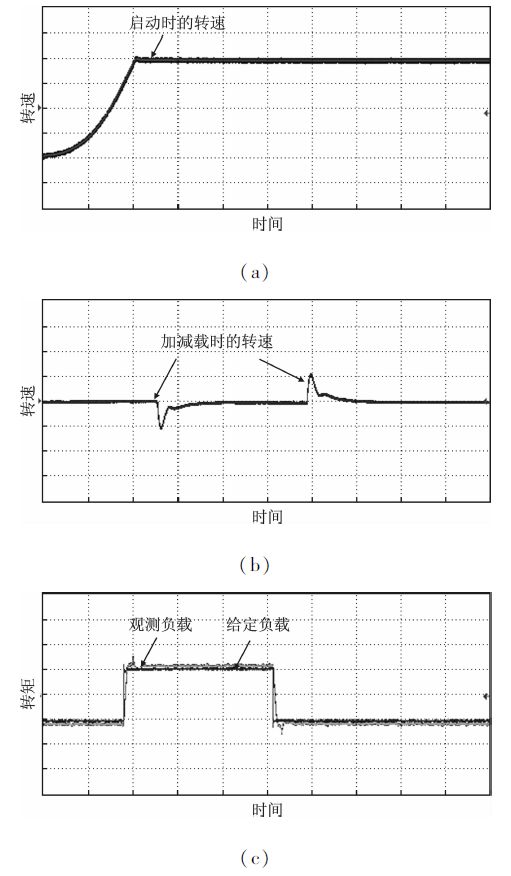
Table 2.
Performance comparison of the three control algorithms"
| 性能比较 | 控制方法 | |
|---|---|---|
| 传统观测器 | 改进观测器 | |
| 速度超调量 | 2.3% | 1.8% |
| 响应时间/ms | 150 | 120 |
| 加载速度波动 | 0.8% | 0.5% |
| 加载后恢复时间/ms | 60 | 35 |
| 减载速度波动 | 0.8% | 0.5% |
| 减载后恢复时间/ms | 60 | 48 |
| [1] | 杨景明, 杨波, 王亚超, 等. 一种新的异步电机离线参数辨识方法[J]. 电工电能新技术, 2019, 38(10):74-80. |
| Yang Jingming, Yang Bo, Wang Yachao, et al. A new off-line parameter identification technique for asynchronous motors[J]. Advanced Technology of Electrical Engineering and Energy, 2019, 38(10):74-80. | |
| [2] | 刘旭东, 李珂, 张奇, 等. 基于非线性扰动观测器的永磁同步电机单环预测控制[J]. 中国电机工程学报, 2018, 38(7):2153-2162. |
| Liu Xudong, Li Ke, Zhang Qi, et al. Single-loop predictive control of permanent magnet synchronous motor based on nonlinear disturbance observer[J]. Proceeding of the CSEE, 2012, 38(7):2153-2162. | |
| [3] | 许小龙, 曾岳南, 王发良, 等. 基于鲁棒自适应状态观测器的异步电机磁链估计抗扰性研究[J]. 电机与控制应用, 2018, 45(12):40-45. |
| Xu Xiaolong, Zeng Yuenan, Wang Faliang, et al. Research on anti-jamming performance of flux estimation of asynchronous motor based on robust adaptive state observer[J]. Electric Machines & Control Application, 2015, 45(12):40-45. | |
| [4] | 钟臻峰, 金孟加, 沈建新. 基于分段PI调节器的模型参考自适应永磁同步电动机全转速范围无传感器控制[J]. 中国电机工程学报, 2018, 38(4):1203-1211. |
| Zhong Zhenfeng, Jin Mengjia, Shen Jianxin. Full speed range sensorless control of permanent magnet synchronous motor with phased PI regulator-based model reference adaptive system[J]. Proceeding of the CSEE, 2008, 38(4):1203-1211. | |
| [5] | 陈春兰. 基于GA的二自由度内模控制[J]. 自动化应用, 2020(4):55-58. |
| Chen Chunlan. Two degrees of freedom internal model control based on GA[J]. Automation Application, 2020(4):55-58. | |
| [6] | 杜川. 基于电流预测控制的永磁同步电机矢量控制策略[J]. 沈阳工业大学学报, 2019, 41(6):616-620. |
| Du Chuan. Vector control strategy of permanent magnet synchronous motor based on current predictive control[J]. Journal of Shenyang University of Technology, 2019, 41(6):616-620. | |
| [7] | 贾自成, 赵敏. 带有界干扰的LPV系统鲁棒预测控制综合方法[J]. 电子科技, 2017, 30(10):104-107. |
| Jia Zicheng, Zhao Min. A robust predictive control synjournal method for LPV systems with bounded disturbances[J]. Electronic Science and Technology, 2017, 30(10):104-107. | |
| [8] | 陆骏, 杨建国, 马胤琛. 永磁同步电机滑模变结构转速直接观测器[J]. 电力电子技术, 2017, 51(2):81-84. |
| Lu Jun, Yang Jianguo, Ma Yinchen. A direct sliding mode speed observer of PMSM[J]. Power Electronics, 2017, 51(2):81-84. | |
| [9] | 荀倩, 王培良, 蔡志端, 等. 基于负载转矩观测器的PMSM抗负载扰动控制策略[J]. 电工电能新技术, 2016, 35(5):36-41. |
| Xun Qian, Wang Peiliang, Cai Zhiduan, et al. Anti-load disturbance control strategy of PMSM based on load torque observer[J]. Advanced Technology of Electrical Engineering and Energy, 2016, 35(5):36-41. | |
| [10] | 杨永乐, 杨明发. 基于负载观测的永磁同步电机非奇异快速终端滑模控制[J]. 电机与控制应用, 2020, 47(8):24-28. |
| Yang Yongle, Yang Mingfa. Non-singular fast terminal sliding mode control of PMSM based on load observation[J]. Electric Machines & Control Application, 2020, 47(8):24-28. | |
| [11] | 李少龙, 赵琴, 李文龙, 等. 基于滑模控制的三相SVPWM逆变器研究[J]. 电子科技, 2016, 29(6):124-127. |
| Li Shaolong, Zhao Qin, Li Wenlong, et al. Study on sliding mode control in three-phase SVPWM inverter[J]. Electronic Science and Technology, 2016, 29(6):124-127. | |
| [12] | 张苏英, 王跃龙, 刘慧贤, 等. 基于新型趋近律的永磁同步电机滑模速度控制[J]. 微特电机, 2020, 48(4):50-54. |
| Zhang Suying, Wang Yuelong, Liu Huixian, et al. Sliding mode speed control of permanent magnet synchronous motor based on new approach law[J]. Small & Special Electrical Machines, 2020, 48(4):50-54. | |
| [13] | 杜丽霞. 无速度传感器的异步电机矢量控制系统设计[J]. 电子科技, 2017, 30(7):110-113. |
| Du Lixia. Design of vector control system for asynchronous motor without speed sensor[J]. Electronic Science and Technology, 2017, 30(7):110-113. | |
| [14] | 邱腾飞, 温旭辉, 赵峰, 等. 永磁同步电机控制参数设计方法[J]. 电工电能新技术, 2016, 35(6):60-66. |
| Qiu Tengfei, Wen Xuhui, Zhao Feng, et al. Design strategy of control parameters of permanent magnet synchronous motor[J]. Advanced Technology of Electrical Engineering and Energy, 2016, 35(6):60-66. | |
| [15] | 吉升阳, 汪旭东, 许孝卓, 等. 基于滑模控制的永磁同步电机直接转矩控制研究[J]. 电子科技, 2019, 32(7):1-5 |
| Ji Shengyang, Wang Xudong, Xu Xiaozhuo, et al. Research on direct torque control of permanent magnet synchronous motor based on sliding mode control[J]. Electronic Science and Technology, 2019, 32(7):1-5. | |
| [16] | 李涛, 谷鑫, 李新旻, 等. 内置式永磁同步电机电流相角自适应弱磁控制[J]. 电工电能新技术, 2019, 38(10):38-45. |
| Li Tao, Gu Xin, Li Xinmin, et al. Adaptive flux-weakening control based on current phase angle for interior permanent magnet synchronous motor[J]. Advanced Technology of Electrical Engineering and Energy, 2019, 38(10):38-45. | |
| [17] | 郭宁, 范波, 廖志明, 等. 感应电机全阶状态观测器及其无源性转速控制[J]. 电机与控制应用, 2017, 44(9):77-83. |
| Guo Ning, Fan Bo, Liao Zhiming, et al. Design of full-order state observer and its speed estimation for induction motor passivity control[J]. Electric Machines & Control Application, 2017, 44(9):77-83 | |
| [18] | 肖启明, 杨明, 刘可述, 等. PMSM伺服系统速度环PI控制器参数自整定及优化[J]. 电机与控制学报, 2014, 18(2):102-107. |
| Xiao Qiming, Yang Ming, Liu Keshu, et al. Parameters self-tuning and optimization of speed PI controller for PMSM servo system[J]. Electric Machines and Control, 2014, 18(2):102-107. | |
| [19] | 郑建英, 于占东. 磁悬浮可作系统的自适应反演滑模控制[J]. 电子设计工程, 2016, 24(2):76-78. |
| Zheng Jianying, Yu Zhandong. Adiptive back-stepping sliding made control of magnetic levitation ball system[J]. Electronic Design Engineering, 2016, 24(2):76-78. |
| [1] | YAO Qiang,ZENG Guohui,HUANG Bo,LIU Jin,WEI Yu. Active Disturbance Rejection Control of VSR under Unbalanced Grid Voltage Based on Firefly Optimization Algorithm [J]. Electronic Science and Technology, 2022, 35(1): 73-79. |
| [2] | JIANG Kaiwen,JIN Hai,XU Shen. Design and Simulation of High Power Factor PMSM without Electrolytic Capacitor [J]. Electronic Science and Technology, 2021, 34(12): 13-18. |
| [3] | TONG Zhaojing,ZHENG Quan,HAN Yaofei,HE Guofeng,QIN Zini. A Novel Sliding Mode Observer for Position Sensorless Control of Permanent Magnet Synchronous Motor [J]. Electronic Science and Technology, 2021, 34(12): 1-6. |
| [4] | WANG Xinzhang,GUO Qiang,XU Xiaozhuo. The Analysis of Field Changes for Induction Motor with Broken End Rings [J]. Electronic Science and Technology, 2021, 34(10): 18-26. |
| [5] | SHI Xun,YI Yingping,WANG Xiaoli. Research on Flux Weakening Control Technology of Interior Permanent Magnet Synchronous Motor [J]. Electronic Science and Technology, 2020, 33(2): 14-19. |
| [6] | FAN Lele,WANG Xudong,FENG Haichao,XU Xiaozhuo. ModelingAnd Simulation of Primary Winding Piecewise PMSLM System Based on Vector Control [J]. Electronic Science and Technology, 2020, 33(12): 1-6. |
| [7] | HUANG Song,LI Haijian,SHI Wei. Interior PMSM Sensorless Control Based on Disturbance Observer [J]. Electronic Science and Technology, 2020, 33(1): 57-62. |
| [8] | SHI Qichen,ZHANG Jiayang. NBTI Effect and Leakage Power Consumption Based on Cyclic Vector Cooperative Optimization Circuit [J]. Electronic Science and Technology, 2019, 32(6): 74-77. |
| [9] | HU Jianqiu,DING Xueming. Design of Double Closed-loop Speed Regulating System for Permanent Magnet Synchronous Motor [J]. Electronic Science and Technology, 2019, 32(3): 21-25. |
| [10] | YIN Gang,HAO Runke,HUANG Wei,LUAN Jian. Design of a Motor Control System Based on Infineon XC2267 [J]. , 2015, 28(5): 101-. |
| [11] | MA Lixin,XU Zhenqian,FAN Hongcheng,LI Guangyao. Research on Optimization Method for the PMSM Servo Control System [J]. , 2015, 28(5): 154-. |
| [12] | FANG Guo-Wei, LUO Wen-Guang. PMSM Control Based on Neural Network Compensation [J]. , 2013, 26(4): 143-. |
|
