Electronic Science and Technology ›› 2023, Vol. 36 ›› Issue (4): 90-102.doi: 10.16180/j.cnki.issn1007-7820.2023.04.013
LÜ Chengxu1,FAN Suozhong2,JI Yunfeng2,YOU Yiping3
Received:2021-11-14
Online:2023-04-15
Published:2023-04-21
Supported by:CLC Number:
LÜ Chengxu,FAN Suozhong,JI Yunfeng,YOU Yiping. Summary of Research on Table Tennis Trajectory Prediction and Rotation Measurement[J].Electronic Science and Technology, 2023, 36(4): 90-102.
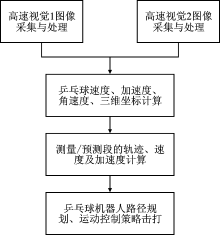
Figure 1.
Table tennis robot hitting process"
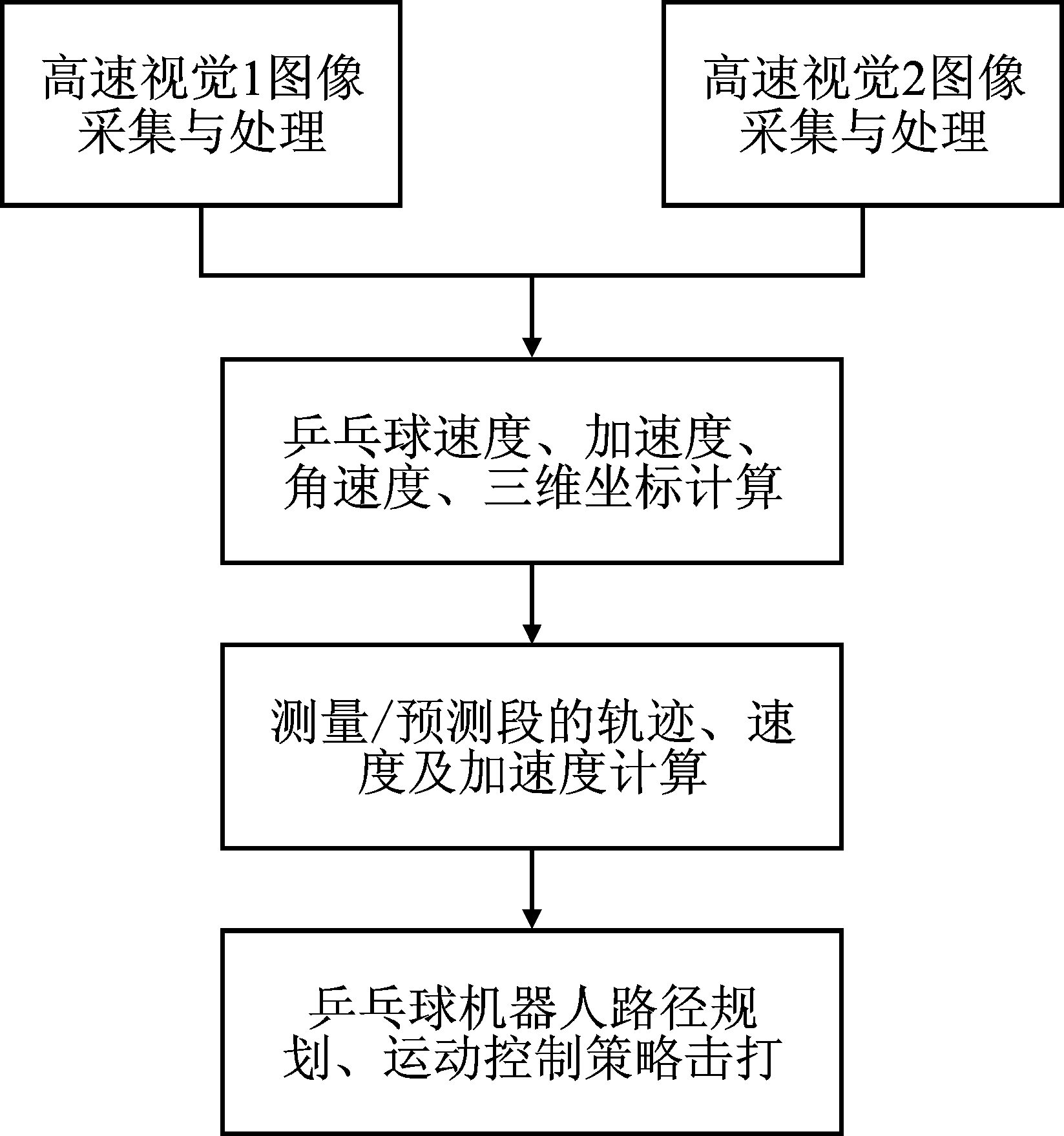
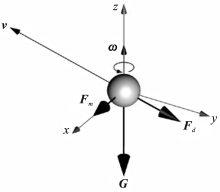
Figure 2.
Rotating table tennis sport model"
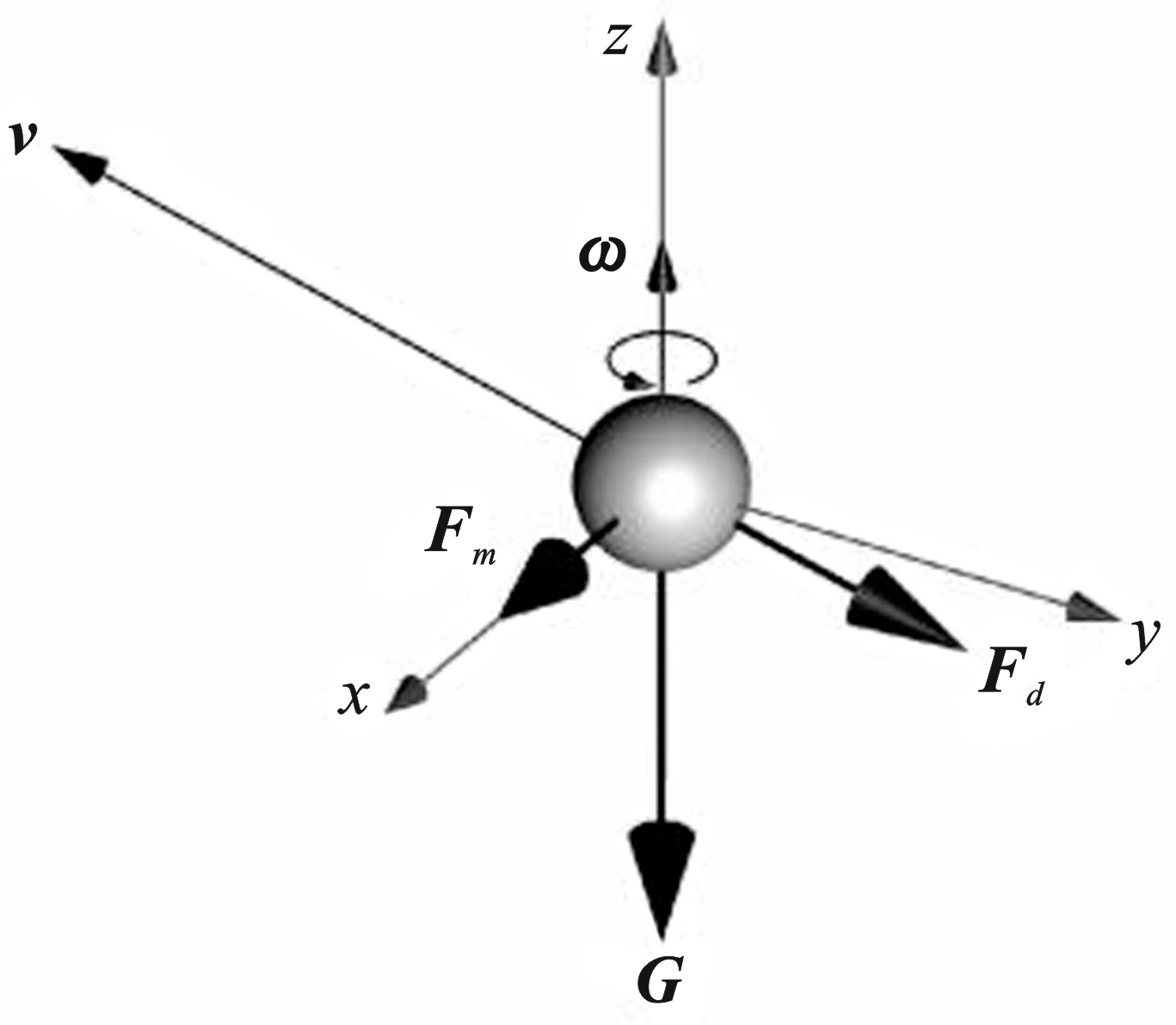
Figure 3.
Classification of trajectory prediction methods"
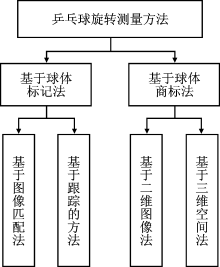
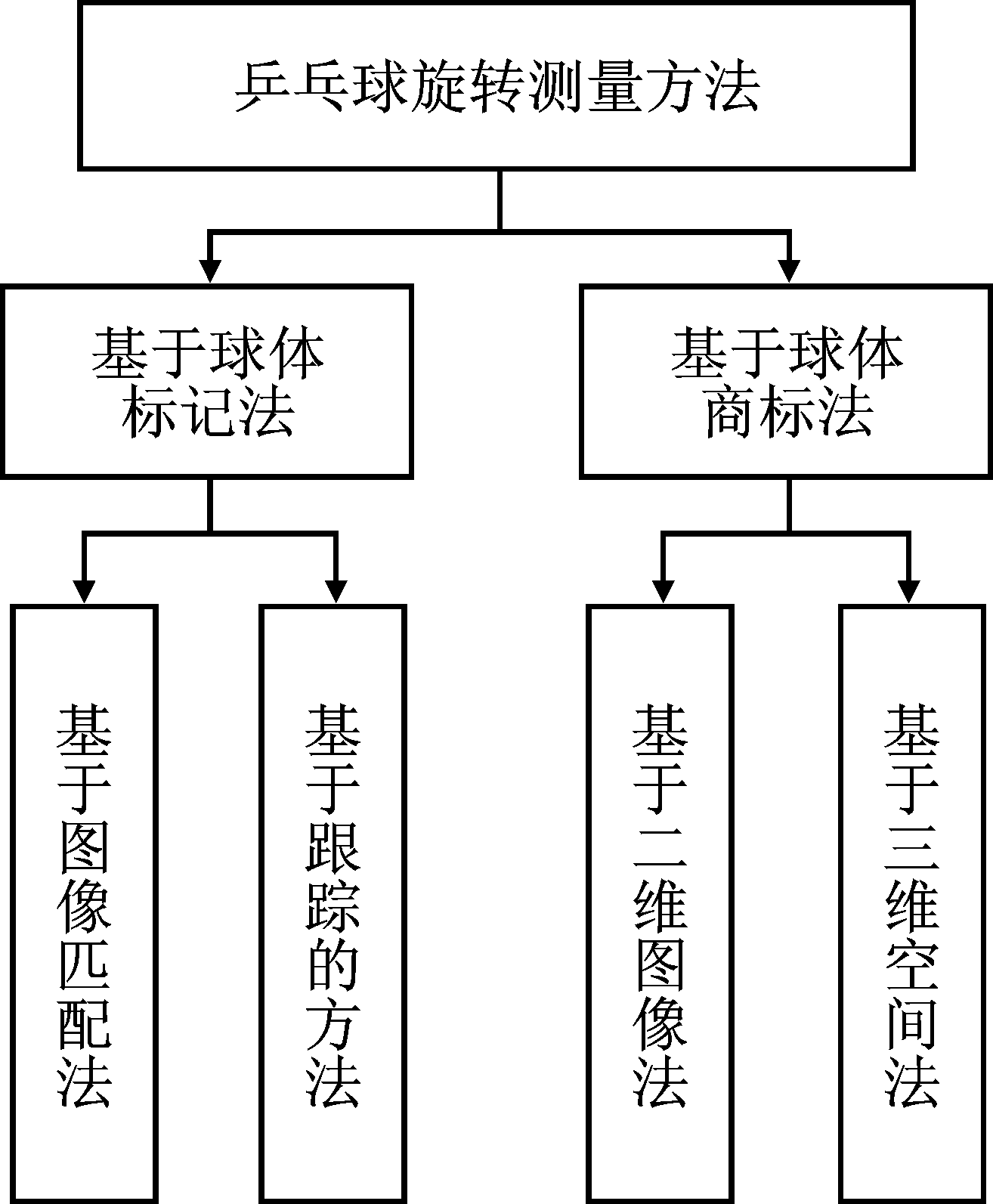
Figure 4.
Classification of rotation measurement methods"
| [1] | 郑魁敬, 崔培. 乒乓球机器人的研究与发展[J]. 机床与液压, 2009, 37(8):238-241. |
| Zheng Kuijing, Cui Pei. Review on the promoting robot table tennis[J]. Machine Tool and Hydraulics, 2009, 37(8):238-241. | |
| [2] | 任艳青, 徐德, 谭民. 旋转球与乒乓球台/球拍的反弹模型[J]. 控制理论与应用, 2012, 29(11):1433-1439. |
| Ren Yanqing, Xu De, Tan Min. Rebound model between spinning table tennis ball and table/racket[J]. Control Theory and Applications, 2012, 29(11):1433-1439. | |
| [3] | 孙在, 余广鑫, 郭美, 等. 乒乓球弧圈球的空气动力学原理及其飞行轨迹的仿真分析[J]. 体育科学, 2008, 28(4):69-71. |
| Sun Zai, Yu Guangxin, Guo Mei, et al. Aerodynamic principles of table tennis loop and numerical analysis of its flying route[J]. China Sport Science, 2008, 28(4):69-71. | |
| [4] | 周雨青, 叶兆宁, 吴宗汉. 球类运动中空气阻力的计算和分析[J]. 物理与工程, 2002(1):55-59. |
| Zhou Yuqing, Ye Zhaoning, Wu Zonghan. Air resistance calculations and analysis in ball games[J]. Physics and Engineering, 2002, 12(1):55-59. | |
| [5] | 张远辉, 韦巍. 在线角速度估计的乒乓球机器人视觉测方法[J]. 浙江大学学报(工学版), 2012, 46(7):1320-1326. |
| Zhang Yuanhui, Wei Wei. Online angular velocity estimated visual measurement for ping pong robot[J]. Journal of Zhejiang University(Engineering Science), 2012, 46(7):1320-1326. | |
| [6] |
Matsushima M, Hashimoto T, Takeuchi M, et al. A learning approach to robotic table tennis[J]. IEEE Transactions on Robotics, 2005, 21(4):767-771.
doi: 10.1109/TRO.2005.844689 |
| [7] | Wang H Q, Cao C X, Leung H. An improved locally weighted regression for a converter re-vanadium prediction modeling[C]. Dalian: Proceedings of the Sixth World Congress on Intelligent Control and Automation, 2006. |
| [8] | 芮庆, 胡宗武, 宫崎文夫. 用LWR学习进行乒乓球轨道预测的仿真研究[J]. 机器人, 1998, 20(5):373-377. |
| Rui Qing, Hu Zongwu, Miyazeki F. Simulation on prediction trace of ping pang ball using LWE learning[J]. Robot, 1998, 20(5):373-378. | |
| [9] | Zhang Z T, Xu D, Yu J Z. Research and latest development of ping-pong robot player[C]. Chongqing: World Congress on Intelligent Control and Automation, 2008. |
| [10] | 彭博, 洪永潮, 杜森森, 等. 乒乓球机器人击打点的预测方法[J]. 江南大学学报(自然科学版), 2007, 6(4):433-437. |
| Peng Bo, Hong Yongchao, Du Sensen, et al. An approach to hit point prediction for ping-pong robot[J]. Journal of Jiangnan University(Natural Science Edition), 2007, 6(4):433-437. | |
| [11] | Sun L, Liu J T, Wang Y S, et al. Ball's flight trajectory prediction for table-tennis game by humanoid robot[C]. Guilin:Proceedings of the IEEE International Conference on Robotics and Biomimetics, 2009. |
| [12] | Wang Q Z, Zhang K J, Wang D D. The trajectory prediction and analysis of spinning ball for a table tennis robot application[C]. Hong Kong: Proceedings of the Fourth Annual IEEE International Conference on Cyber Technology in Automation, Control and Intelligent, 2014. |
| [13] | Chen X P, Huang Q, Zhang W M, et al. Ping-pong trajectory perception and prediction by a PC based high speed four-camera vision system[C]. Taipei: Proceedings of the Ninth World Congress on Intelligent Control and Automation, 2011. |
| [14] |
Liang C M, Teresa G, Isabel L, et al. Prediction and analysis of sphere motion trajectory based on deep learning algorithm optimization[J]. Journal of Intelligent and Fuzzy Systems, 2019, 37(5):6275-6285.
doi: 10.3233/JIFS-179209 |
| [15] |
Yang L, Zhang H B, Zhu X Y, et al. Ball motion control in the table tennis robot system using time-series deep reinforcement learning[J]. IEEE Access, 2021, 9:99816-99827.
doi: 10.1109/ACCESS.2021.3093340 |
| [16] | Lin H I, Huang Y C. Ball trajectory tracking and prediction for a ping-pong robot[C]. Hulun Buir: Proceedings of the Ninth International Conference on Information Science and Technology, 2019. |
| [17] | 张远辉, 韦巍, 虞旦. 基于空气阻力因子估计的乒乓机器人精确轨迹跟踪[J]. 光电工程, 2009, 36(6):15-20. |
| Zhang Yuanhui, Yu Dan. Precisely tracking trajectory of ping-pong robot based on air drag factor estimation[J]. Opto-Electronic Engineering, 2009, 36(6): 15-20. | |
| [18] | Mülling K, Kober J, Peters J. A biomimetic approach to robot table tennis[C]. Taipei: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2010. |
| [19] | Zhang Y F, Xiong R, Zhao Y S, et al. An adaptive trajectory prediction method for ping-pong robots[C]. Montreal: Proceedings of the Fifth International Conference on Intelligent Robotics and Applications, 2012. |
| [20] | Huang Y L, Schölkopf B, Peters J. Learning optimal striking points for a ping-pong playing robot[C]. Hamburg: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2015. |
| [21] | Yu Z G, Lu Y, Huang Q, et al. Design of a humanoid ping-pong player robot with redundant joints[C]. Shenzhen: Proceedings of the IEEE International Conference on Robotics and Biomimetics, 2013. |
| [22] | Zhang Z T, Xu D, Tan M. Visual measurement and prediction of ball trajectory for table tennis robot[J]. Transactions on Instrumentation and Measurement, 2010, 59(12):3195-3205. |
| [23] | Huang Y L, Buchler D, Koc O, et al. Jointly learning trajectory generation and hitting point prediction in robot table tennis[C]. Cancun: Proceedings of the IEEE-RAS the Sixteenth International Conference on Humanoid Robots (Humanoids), 2017. |
| [24] | 杨华, 关志明. 基于ODE的乒乓球运动轨迹仿真研究[J]. 计算机仿真, 2011, 28(9):230-233. |
| Yang Hua, Guan Zhiming. Simulation of ping-pong trajectory based on ODE[J]. Computer Simulation, 2011, 28(9):230-233. | |
| [25] | 王奇志, 杨晓晓. 乒乓球轨迹预测的研究与仿真[J]. 计算机工程与科学, 2013, 35(2):164-168. |
| Wang Qizhi, Yang Xiaoxiao. Simulation of trajectory prediction of ping-pong[J]. Computer Engineering and Science, 2013, 35(2):164-168. | |
| [26] |
Liu M C, Li Q Y. Analysis on the application of region-growing algorithm in table tennis trajectory simulation[J]. Research Journal of Applied Sciences Engineering and Technology, 2013, 5(9):2779-2785.
doi: 10.19026/rjaset.5.4806 |
| [27] | Andersson R L. Aggressive trajectory generator for a robotic ping-pong player[C]. Philadelphia: Proceedings of the IEEE International Conference on Robotics and Automation, 1988. |
| [28] | 苏虎, 徐德, 陈国栋, 等. 基于两阶段多目标模糊决策的乒乓球机器人击球点选择[J]. 控制理论与应用, 2013, 30(5):597-603. |
| Su Hu, Xu De, Chen Guodong, et al. Striking position selection based on two-step multi-purpose fuzzy decision method for robotic table tennis[J]. Control Theory and Applications, 2013, 30(5):597-603. | |
| [29] | Huang Y L, Xu D, Tan M, et al. Trajectory prediction of spinning ball for ping-pong player robot[C]. San Francisco: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2011. |
| [30] | Zhao Y S, Zhang Y F, Xiong R, et al. Optimal state estimation of spinning ping-pong ball using continuous motion model[J]. Transactions on Instrumentation and Measurement, 2015, 64(8):2208-2216. |
| [31] |
Zhao Y S, Xiong R, Zhang Y F. Model based motion state estimation and trajectory prediction of spinning ball for ping-pong robots using expectation-maximization algorithm[J]. Journal of Intelligent and Robotic Systems, 2017, 87(3):407-423.
doi: 10.1007/s10846-017-0515-8 |
| [32] |
Andersson R L. Dynamic sensing in a ping-pong playing robot[J]. IEEE Transactions on Robotics and Automation, 1989, 5(6):728-739.
doi: 10.1109/70.88095 |
| [33] |
Rusdorf S, Brunnett G, Lorenz M, et al. Real-time interaction with a humanoid avatar in an immersive table tennis simulation[J]. Transactions on Visualization and Computer Graphics, 2007, 13(1):15-25.
doi: 10.1109/TVCG.2007.18 |
| [34] | Chen X P, Tian Y, Huang Q, et al. Dynamic model based ball trajectory prediction for a robot ping-pong player[C]. Tianjin:Proceedings of the IEEE International Conference on Robotics and Biomimetics, 2010. |
| [35] |
Griffiths I, Evans C, Griffiths N. Tracking the flight of a spinning football in three dimensions[J]. Measurement Science and Technology, 2005, 16(10):2056-2065.
doi: 10.1088/0957-0233/16/10/022 |
| [36] | Nonomura J, Nakashima A, Hayakawa Y. Analysis of effects of rebounds and aerodynamics for trajectory of table tennis ball[C]. Taipei: Proceedings of the SICE Annual Conference, 2010. |
| [37] | Nakashima A, Ogawa Y, Liu C F, et al. Robotic table tennis based on physical models of aerodynamics and rebounds[C]. Karon Beach: Proceedings of the IEEE International Conference on Robotics and Biomimetics, 2011. |
| [38] | Nakashima A, Nonomura J, Liu C F, et al. Hitting back-spin balls by robotic table tennis system based on physical models of ball motion[C]. Dubrovnik: Proceedings of the Tenth IFAC Symposium on Robot Control, 2012. |
| [39] | Nakashima A, Okamoto T, Hayakawa Y. An online estimation of rotational velocity of flying ball via aerodynamics[C]. Cape Town: Proceedings of the Nineteenth IFAC World Congress on International Federation of Automatic Control, 2014. |
| [40] | 张康洁, 王奇志. 无迹卡尔曼滤波在旋转乒乓球轨迹预测中的应用[J]. 计算机科学, 2014, 41(1):83-87. |
| Zhang Kangjie, Wang Qizhi. Application of unscented Kalman filter in rotary table tennis trajectory prediction[J]. Computer Science, 2014, 41(1):83-87. | |
| [41] |
Lu C F, Zhang W P. Kalman tracking algorithm of ping-pong robot based on fuzzy real-time image[J]. Journal of Intelligent and Fuzzy Systems, 2020, 38(4):3585-3594.
doi: 10.3233/JIFS-179581 |
| [42] | Ren Y Q, Fang Z J, Xu D, et al. A trajectory prediction algorithm based on fuzzy rectification for spinning ball[C]. Istanbul: Proceedings of the Ninth Asian Control Conference, 2013. |
| [43] | Blank P, Groh B H, Eskofier B M. Ball speed and spin estimation in table tennis using a racket-mounted inertial sensor[C]. Maui: Proceedings of the ACM International Joint Conference on Pervasive and Ubiquitous Computing (UBICOMP)/ACM International Symposium on Wearable Computers, 2017. |
| [44] | 任艳青, 方灶军, 徐德, 等. 基于模糊神经网络的乒乓球旋转飞行轨迹模式分类[J]. 控制与决策, 2014, 29(2):263-269. |
| Ren Yanqing, Fang Zaojun, Xu De, et al. Spinning pattern classification of table tennis ball’s flying trajectory based on fuzzy neural network[J]. Control and Decision, 2014, 29(2):263-269. | |
| [45] | Wang Q Z, Sun Z Y. Trajectory identification of spinning ball using improved extreme learning machine in table tennis robot system[C]. Shenyang: Proceedings of the IEEE International Conference on Cyber Technology in Automation,Control, and Intelligent Systems, 2015. |
| [46] | 季云峰, 黄睿, 施之皓, 等. 乒乓球精确旋转、速度及落点数据的人工神经网络模型研究[J]. 上海体育学院学报, 2018, 42(6):98-103. |
| Ji Yunfeng, Huang Rui, Shi Zhihao, et al. Artificial neural network model for the data of precise rotation, velocity and placement in table tennis[J]. Journal of Shanghai University of Sport, 2018, 42(6):98-103. | |
| [47] | Qiao F F. Application of deep learning in automatic detection of technical and tactical indicators of table tennis[J]. PLoS ONE, 2021, 16(3):1-16. |
| [48] | 吴珺. 基于学习的旋转乒乓球定位与轨迹预测[D]. 杭州: 浙江大学, 2018. |
| Wu Jun. Localization and trajectory prediction of spinning-flying ping-pong ball based on learning[D]. Hangzhou: Zhejiang University, 2018. | |
| [49] |
Gomez-Gonzalez S, Prokudin S, Scholkopf B, et al. Real time trajectory prediction using deep conditional generative models[J]. IEEE Robotics and Automation Letters, 2020, 5(2):970-976.
doi: 10.1109/LSP.2016. |
| [50] | Wu E, Koike H. FuturePong: Real-time table tennis trajectory forecasting using pose prediction network[C]. Honolulu: Proceedings of the ACM CHI Conference on Human Factors in Computing Systems, 2020. |
| [51] | Zhang J. Automatic detection method of technical and tactical indicators for table tennis based on trajectory prediction using compensation fuzzy neural network[J]. Computational Intelligence and Neuroscience, 2021(1):1-12. |
| [52] | Tebbe J, Gao Y P, Sastre-Rienietz M, et al. A table tennis robot system using an industrial KUKA robot arm[C]. Stuttgart: Proceedings of the fortieth German Conference, 2018. |
| [53] | 曾鉴彬. 七自由度乒乓球机器人系统的研究与设计[D]. 上海: 东华大学, 2020. |
| Zeng Jianbin. Research and design of table tennis robot system with seven degrees of freedom[D]. Shanghai: Donghua University, 2020. | |
| [54] | 赵永生. 旋转飞行乒乓球的状态估计和轨迹预测[D]. 杭州: 浙江大学, 2017. |
| Zhao Yongsheng. State estimation and trajectory prediction of spinning-flying ping-pong ball[D]. Hangzhou: Zhejiang University, 2017. | |
| [55] | 李伟健. 基于深度学习的乒乓球目标检测与旋转球轨迹预测[D]. 上海: 东华大学, 2021. |
| Li Weijian. Table tennis target detection and rotating ball trajectory prediction based on deep learning[D]. Shanghai: Donghua University, 2021. | |
| [56] | 张传伟, 王京梅, 林晓明, 等. 基于背景差分的一种运动目标检测方法[J]. 电子科技, 2015, 28(10):69-71. |
| Zhang Chuanwei, Wang Jingmei, Lin Xiaoming, et al. A moving objects detection method based on background subtraction[J]. Electronic Science and Technology, 2015, 28(10):69-71. | |
| [57] | 官洪运, 苏振涛, 汪晨. 基于特征融合的背景差分改进算法[J]. 电子科技, 2020, 33(12):22-27. |
| Guan Hongyun, Su Zhentao, Wang Chen. Improved background subtraction based on feature fusion[J]. Electronic Science and Technology, 2020, 33(12),22-27. | |
| [58] |
Gomez-Gonzalez S, Nemmour Y, Schlkopf B, et al. Reliable real time ball tracking for robot table tennis[J]. Robotics, 2019, 8(4):90.
doi: 10.3390/robotics8040090 |
| [59] | Nakashima A, Kobayashi Y, Ogawa Y, et al. Modeling of rebound phenomenon between ball and racket rubber with spinning effect[C]. Fukuoka: Proceedings of the ICROS-SICE International Joint Conference, 2009. |
| [60] | Tamaki T, Sugino T, Yamamoto M. Measuring ball spin by image registration[C]. Fukuoka: Proceedings of the Tenth Frontiers of Computer Vision, 2004. |
| [61] | Liu C F, Hayakawa Y, Nakashima A. A registration algorithm for on-line measuring the rotational velocity of a table tennis ball[C]. Karon Beach: Proceedings of the IEEE International Conference on Robotics and Biomimetics, 2011. |
| [62] |
Liu C F, Nakashima A. An on-line algorithm for measuring the translational and rotational velocities of a table tennis ball[J]. SICE Journal of Control, Measurement, and System Integration, 2012, 5(4):233-241.
doi: 10.9746/jcmsi.5.233 |
| [63] | Liu C F, Hayakawa Y, Nakashima A. On a modified method of measuring the rotational speed of a table tennis ball[C]. Okinawa: Proceedings of the Eleventh SICE Control Division Conf, 2011. |
| [64] | Tamaki T, Wang H M, Raytchev B, et al. Estimating the spin of a table tennis ball using inverse compositional image alignment[C]. Kyoto: Proceedings of the IEEE International Conference on Acoustics,Speech and Signal Processing, 2012. |
| [65] |
Watanabe Y, Komuro T, Kagami S, et al. Multi-target tracking using a vision chip and its applications to real-time visual measurement[J]. Journal of Robotics and Mechatronics, 2005, 17(2):121-129.
doi: 10.20965/jrm.2005.p0121 |
| [66] | Ishii I, Ishikawa M. Self-windowing for high speed vision[C]. Detroit: Proceedings of the IEEE International Conference on Robotics and Automation, 1999. |
| [67] | Nakashima A, Tsuda Y, Liu C, et al. A real-time measuring method of translational/rotational velocity of a table tennis ball[C]. Cambridge: Proceedings of the Fifth IFAC Symposium on Mechatronic Systems, 2010. |
| [68] | 季云峰, 陆爱发, 任杰, 等. 基于乒乓球机器人视觉系统的单色乒乓球旋转三维速度测定[J]. 上海体育学院学报, 2017, 41(3):83-88. |
| Ji Yunfeng, Lu Aifa, Ren Jie, et al. 3D velocity measurement of single-color table tennis rotation based on visual system of table tennis robot[J]. Journal of Shanghai University of Sport, 2017, 41(3):83-88. | |
| [69] | 季云峰, 施之皓, 任杰, 等. 基于单目视觉伺服系统的高速旋转球体三维速度测定[J]. 中国体育科技, 2017, 53(2):139-145. |
| Ji Yunfeng, Shi Zhihao, Ren Jie, et al. 3D velocity measurement of high-speed rotating sphere based on the monocular vision servo system[J]. China Sport Science and Technology, 2017, 53(2):139-145. | |
| [70] | Zhang Y F, Zhao Y S, Xiong R, et al. Spin observation and trajectory prediction of a ping-pong ball[C]. Hong Kong: Proceedings of the IEEE International Conference on Robotics and Automation, 2014. |
| [71] | Zhang Y F, Xiong R, Zhao Y S, et al. Real-time spin estimation of ping-pong ball using its natural brand[J]. Transactions on Instrumentation and Measurement, 2015, 64(8):2280-2290. |
| [72] | Tebbe J, Klamt L, Gao Y, et al. Spin detection in robotic table tennis[C]. Paris: Proceedings of the IEEE International Conference on Robotics and Automation, 2020. |
| [73] | 季云峰. 基于遗传算法的乒乓球轨迹反向推导旋转方法研究[J]. 南京体育学院学报, 2021, 20(2):53-60. |
| Ji Yunfeng. Reverse calculation of rotation using trajectory of table tennis based on genetic algorithm[J]. Journal of Nanjing Sports Institute, 2021, 20(2):53-60. | |
| [74] | 章逸丰. 快速飞行物体的状态估计和轨迹预测[D]. 杭州: 浙江大学, 2015. |
| Zhang Yifeng. State estimation and trajectory prediction of fast flying object[D]. Hangzhou: Zhejiang University, 2015. |
| [1] | WEI Zefeng,ZHOU Yuanyuan. Workflow Scheduling Algorithm Based on Mobile Perception in Mobile Edge Environment [J]. Electronic Science and Technology, 2022, 35(9): 58-64. |
| [2] | LI Sen, LIU Hong-Jun, CHENG Zhong. Improvement of TBM's Impact-point Prediction Precision [J]. , 12, 25(9): 85-. |
|
