| [1] |
赵磊, 李振伟, 杨晓利, 等. 一种基于图像处理的提示盲道检测方法[J]. 计算机技术与发展, 2021, 31(2):91-96.
|
|
Zhao Lei, Li Zhenwei, Yang Xiaoli, et al. A warning blind sidewalk detection method based on image processing[J]. Computer Technology and Development, 2021, 31(2):91-96.
|
| [2] |
莫亚男. 基于Gabor特征的盲道检测与应用[D]. 重庆: 重庆师范大学, 2020:41-52.
|
|
Mo Yanan. Blind path detection and application basedon Gabor feature[D]. Chongqing: Chongqing Normal University, 2020:41-52.
|
| [3] |
叶倩倩. 基于深度学习的盲道检测算法研究[D]. 郑州: 郑州轻工业大学, 2022:38-46.
|
|
Ye Qianqian. Research on tactile pavement detection algorithm based on deep learning[D]. Zhengzhou: Zhengzhou University of Light Industry, 2022:38-46.
|
| [4] |
Cao Z, Xu X, Hu B, et al. Rapid detection of blind roads and crosswalks by using a lightweight semantic segmentation network[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 22(10):6188-6197.
doi: 10.1109/TITS.2020.2989129
|
| [5] |
Katzschmann R K, Araki B, Rus D. Safe local navigation for visually impaired users with a time-of-flight and haptic feedback device[J]. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2018, 26(3):583-593.
doi: 10.1109/TNSRE.2018.2800665
pmid: 29522402
|
| [6] |
Simöes W C S S, De Lucena V F. Blind user wearable audio assistance for indoor navigation based on visual markers and ultrasonic obstacle detection[C]. Nantou: IEEE International Conference on Consumer Electronics, 2016:933-942.
|
| [7] |
方仁杰, 朱维兵. 基于GPS定位与超声波导盲拐杖的设计[J]. 计算机测量与控制, 2011, 19(5):1154-1157.
|
|
Fang Renjie, Zhu Weibing. Design of guiding blind cane based on GPS positioning and ultrasonic detection[J]. Computer Measurement & Control, 2011, 12(5):1154-1157.
|
| [8] |
Girshick R. Fast R-CNN[C]. Santiago: Proceedings of theIEEE International Conference on Computer Vision, 2015:2001-2011.
|
| [9] |
Redmon J, Divvala S, Girshick R, et al. You only look once:Unified,real-time object detection[C]. Las Vegas: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2016:899-905.
|
| [10] |
Liu W, Anguelov D, Erhan D, et al. Ssd:Single shot mu-ltibox detector[C]. Amsterdam: Euro Pean Conference on Computer Vision, 2016:56-61.
|
| [11] |
段中兴, 王剑, 丁青辉, 等. 基于深度学习的盲道障碍物检测算法研究[J]. 计算机测量与控制, 2021, 29(12):27-32.
|
|
Duan Zhongxing, Wang Jian, Ding Qinghui, et al. Research on obstacle detection algorithm of blind path based on deep learning[J]. Computer Measurement and Control, 2021, 29(12):27-32.
|
| [12] |
赵崇, 迟蒙蒙, 储聪, 等. 导盲犬行走机构运动仿真及其视觉识别算法研究[J]. 电子科技, 2021, 34(9):66-72.
|
|
Zhao Chong, Chi Mengmeng, Chu Cong, et al. Research on motion simulation and visual recognition algorithm of guide dog walking mechanism[J]. Electronic Science and Technology, 2021(9):66-72.
|
| [13] |
Wu D, Liao M W, Zhang W T, et al. Yolop:You only look once for panoptic driving perception[J]. Machine Intelligence Research, 2022, 19(6):550-562.
doi: 10.1007/s11633-022-1339-y
|
| [14] |
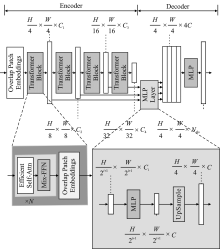
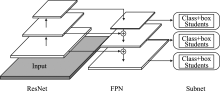
Xie E, Wang W, Yu Z, et al. SegFormer:Simple and efficient design for semantic segmentation with transformers[J]. Advances in Neural Information Processing Systems, 2021, 34(4):12077-12090.
|
| [15] |
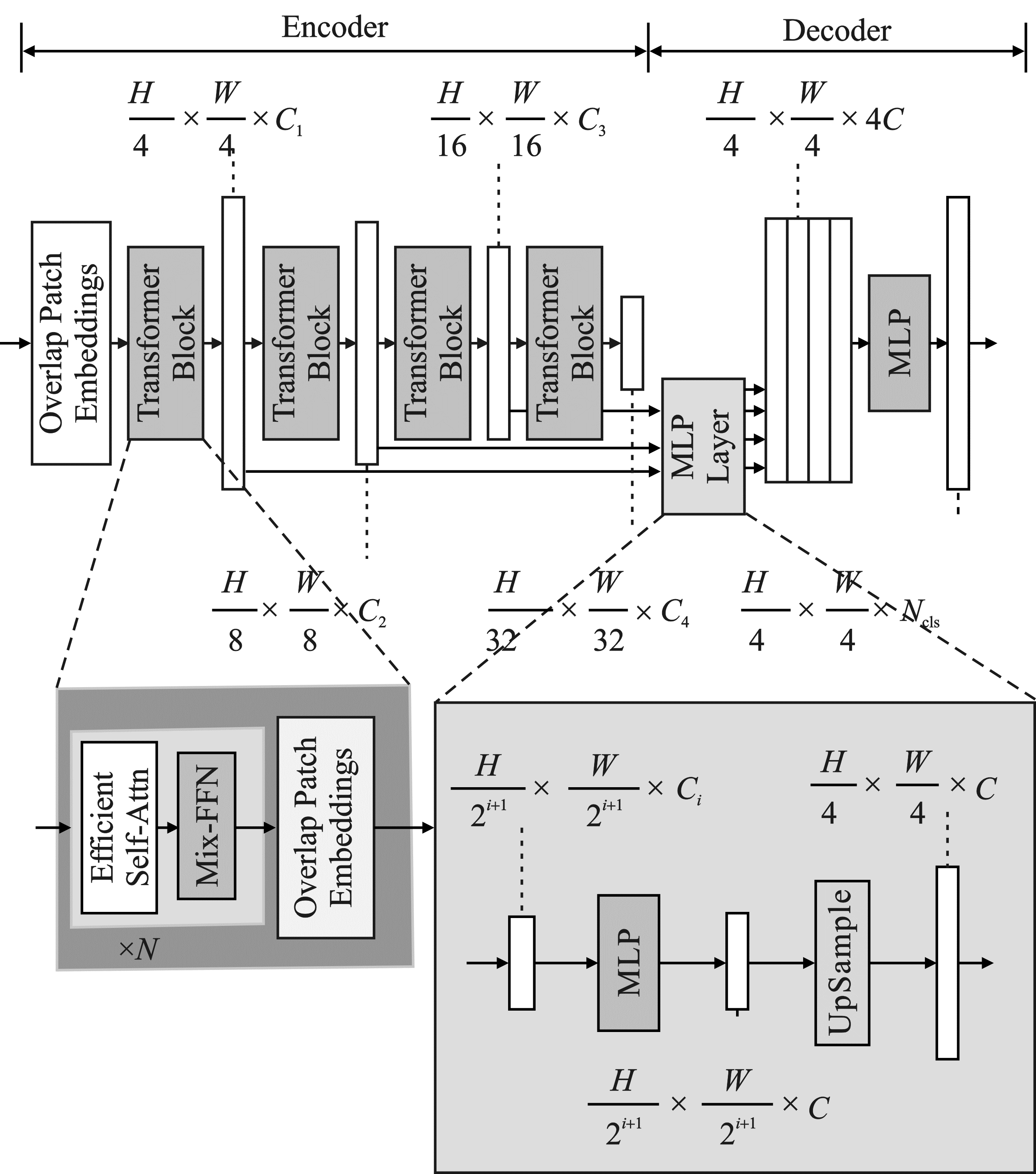
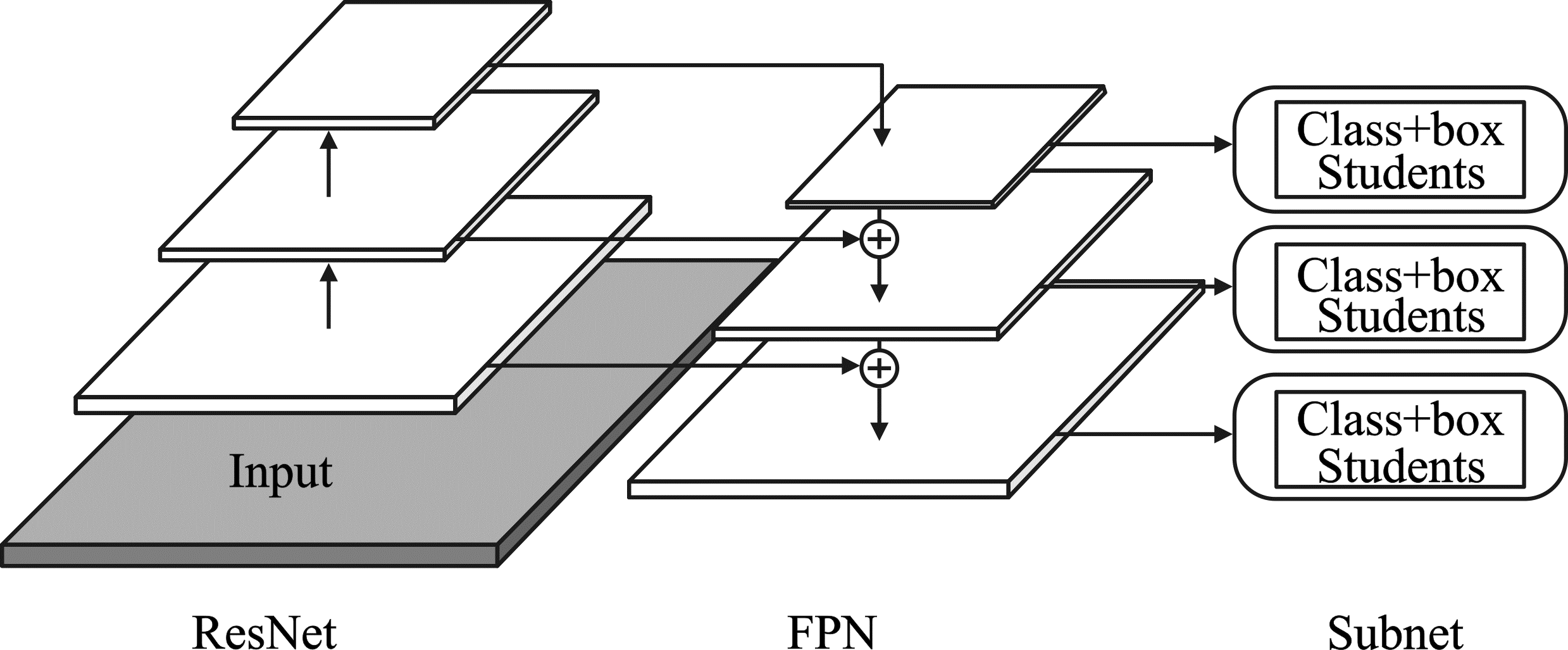
Lin T Y, Goyal P, Girshick R, et al. Focal loss for dense object detection[C]. Venice: Proceedings of the IEEE International Conference on Computer Vision, 2017:628-633.
|
| [16] |
He K, Zhang X, Ren S, et al. Deep residual learning forimage recognition[C]. Las Vegas: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2016:269-276.
|
| [17] |
Lin T Y, Dollár P, Girshick R, et al. Feature pyramid networks for object detection[C]. Venice: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2017:315-320.
|
| [18] |
He K, Zhang X, Ren S, et al. Spatial pyramid pooling in deep convolutional networks for visual recognition[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2015, 37(9):1904-1916.
doi: 10.1109/TPAMI.2015.2389824
pmid: 26353135
|
| [19] |
黄静, 谢宣. 基于改进的SSD监理目标检测研究[J]. 电子科技, 2022, 35(5):7-13.
|
|
Huang Jing, Xie Xuan. Research on supervision object detection based on improved SSD[J]. Electronic Science and Technology, 2022, 35(5):7-13.
|
| [20] |
Bodla N, Singh B, Chellappa R, et al. Soft-NMS:Improving object detection with one line of code[C]. Venice: Proceedings of the IEEE International Conference on Computer Vision, 2017:698-705.
|