Electronic Science and Technology ›› 2022, Vol. 35 ›› Issue (1): 21-28.doi: 10.16180/j.cnki.issn1007-7820.2022.01.004
Previous Articles Next Articles
ZONG Shengkang,CHENG Jianpeng,ZHANG Xiliang
Received:2020-09-15
Online:2022-01-15
Published:2022-02-24
Supported by:CLC Number:
ZONG Shengkang,CHENG Jianpeng,ZHANG Xiliang. Automatic Detection Method of Crane Track Altitude Difference Based on Spot Position[J].Electronic Science and Technology, 2022, 35(1): 21-28.
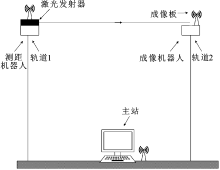
Figure 1.
Schematic diagram of track altitude difference detection structure"
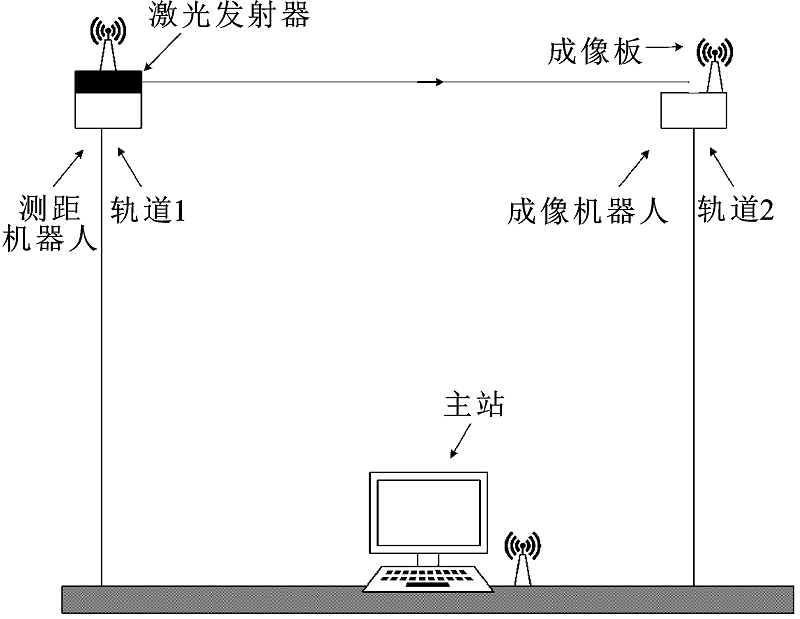
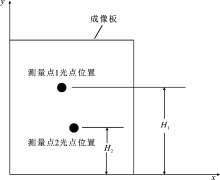
Figure 2.
Schematic diagram of spot position coordinates of track measurement point 1 and measurement point 2"
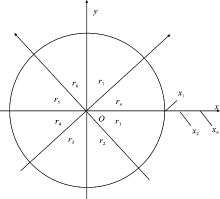
Figure 3.
Schematic diagram of laser spot image trimming method"
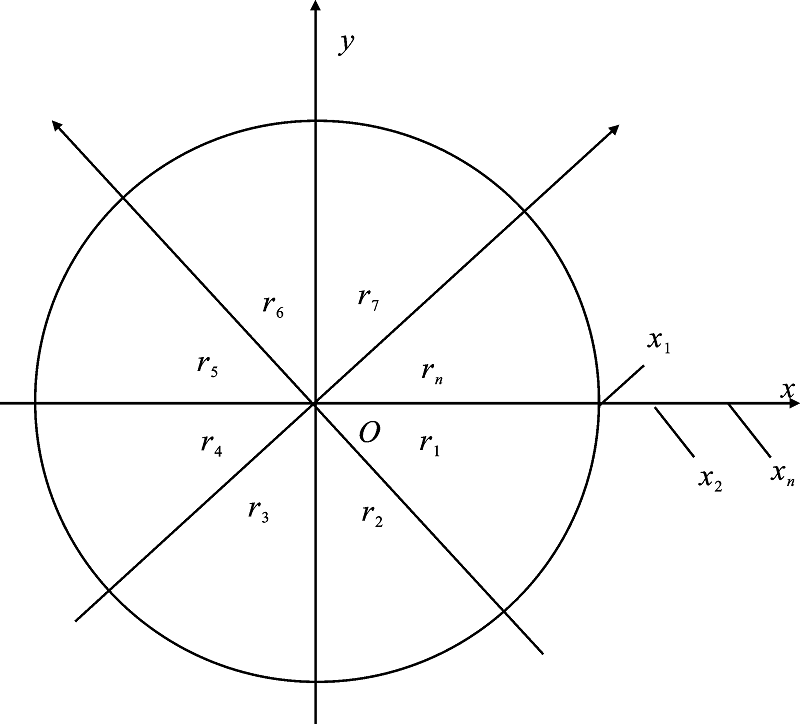
Figure 4.
Comparison of laser spot image before and after trimming (a)Original image; (b)Image after trimming"
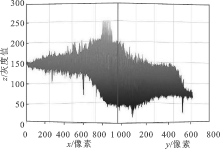
Figure 5.
Gray distribution before trimming"
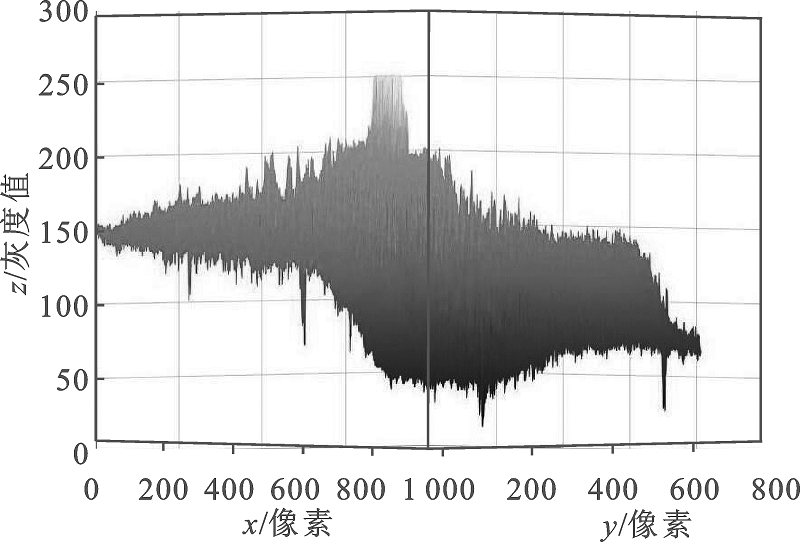
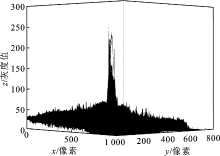
Figure 6.
Gray distribution after trimming"
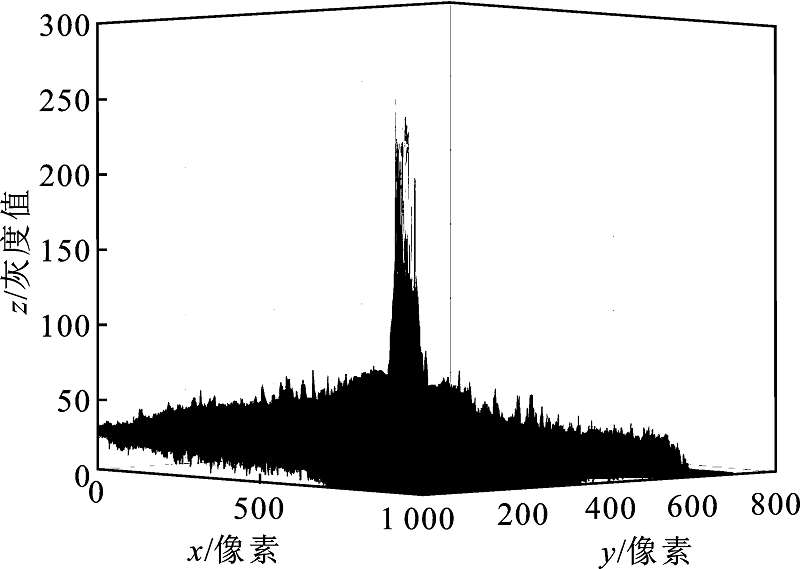
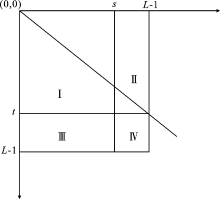
Figure 7.
Schematic diagram of grayscale block"
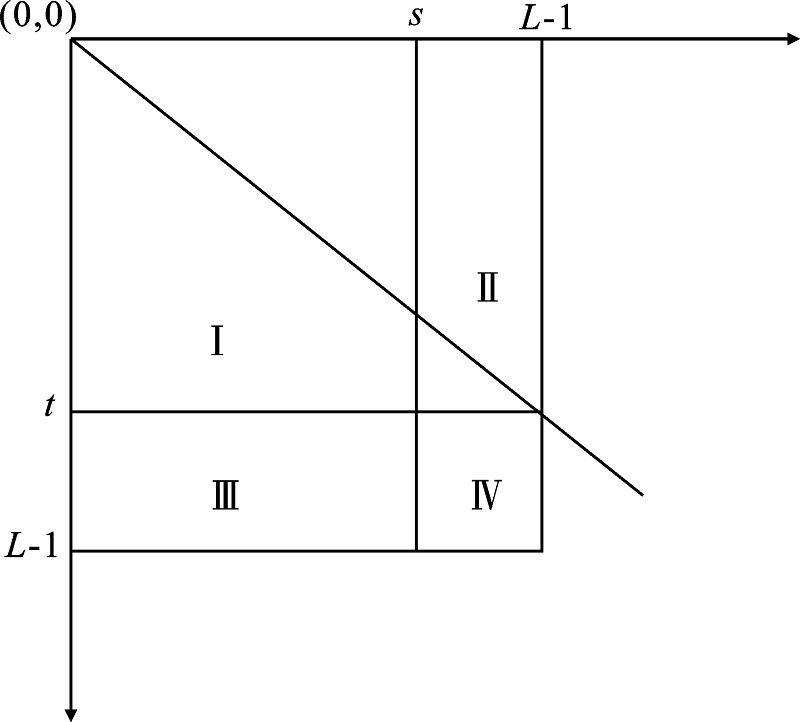
Figure 8.
Aser spot image after segmentation"
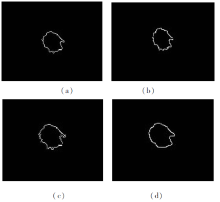
Figure 9.
Comparison of the results of laser spot edge extraction (a)Sobel operator extraction result;(b)Roberts operator extraction result;(c)Prewitt operator extraction result;(d)Cannny operator extraction result"
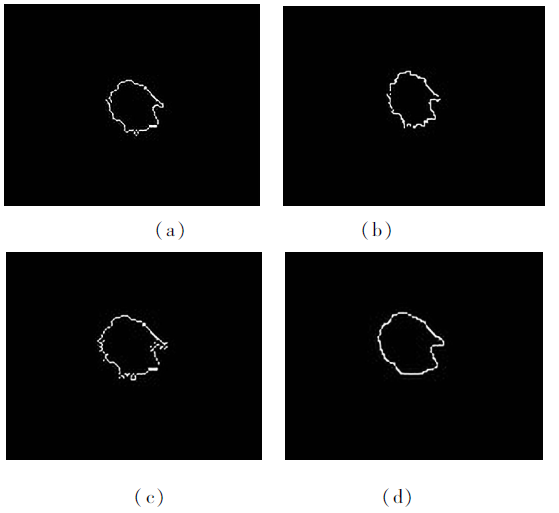

Figure 10.
The edge fitting circle of the laser spot image"
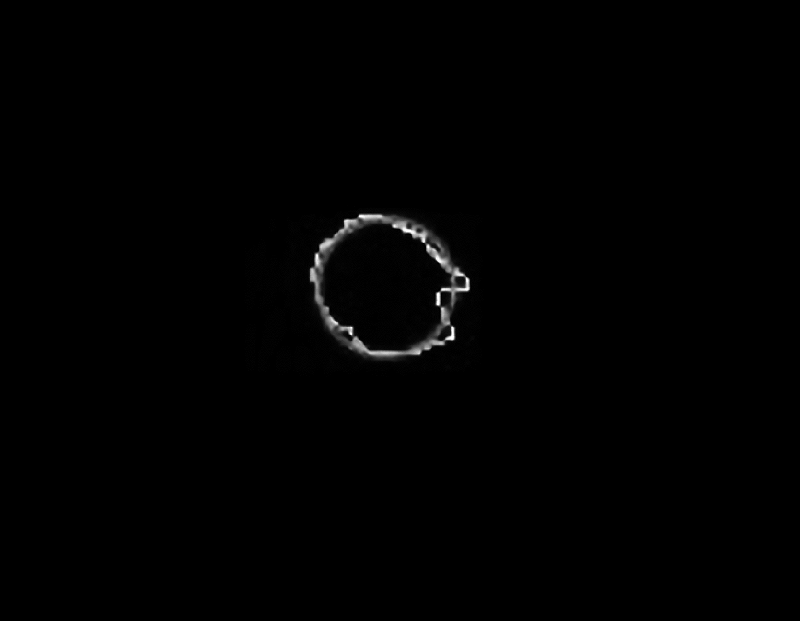
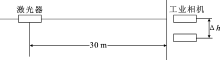
Figure 11.
Schematic diagram of light spot image position recognition test principle"
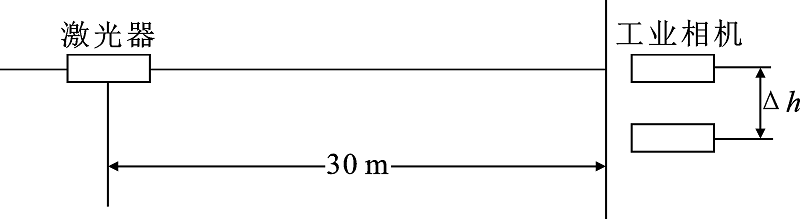
Table 1.
Moving distance recognition results/mm"
| 修整拟合方法 | 亮度阈值方法 | |||
|---|---|---|---|---|
| 实际距离 | 识别结果 | 识别误差 | 识别结果 | 识别误差 |
| 3.12 | 3.30 | 0.18 | 3.48 | 0.36 |
| 3.18 | 3.41 | 0.23 | 2.95 | -0.25 |
| 2.96 | 3.12 | 0.16 | 2.67 | -0.29 |
| 3.22 | 3.02 | -0.20 | 3.60 | 0.38 |
| 2.88 | 3.04 | 0.16 | 2.52 | -0.36 |
| 6.26 | 6.08 | -0.18 | 6.57 | 0.30 |
| 6.04 | 6.27 | 0.25 | 5.70 | -0.34 |
| 6.12 | 6.29 | 0.18 | 6.41 | 0.29 |
| 5.92 | 5.66 | -0.26 | 5.54 | -0.38 |
| 5.98 | 5.77 | -0.20 | 6.27 | 0.29 |
| 9.88 | 10.28 | 0.40 | 10.21 | 0.33 |
| 9.92 | 9.69 | -0.23 | 9.81 | -0.11 |
| 10.14 | 9.96 | -0.18 | 9.95 | -0.19 |
| 9.86 | 10.08 | 0.22 | 10.39 | 0.53 |
| 10.18 | 10.34 | 0.16 | 9.83 | -0.35 |
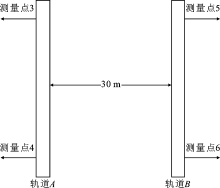
Figure 12.
Schematic diagram of experimental principle of track altitude difference detection"
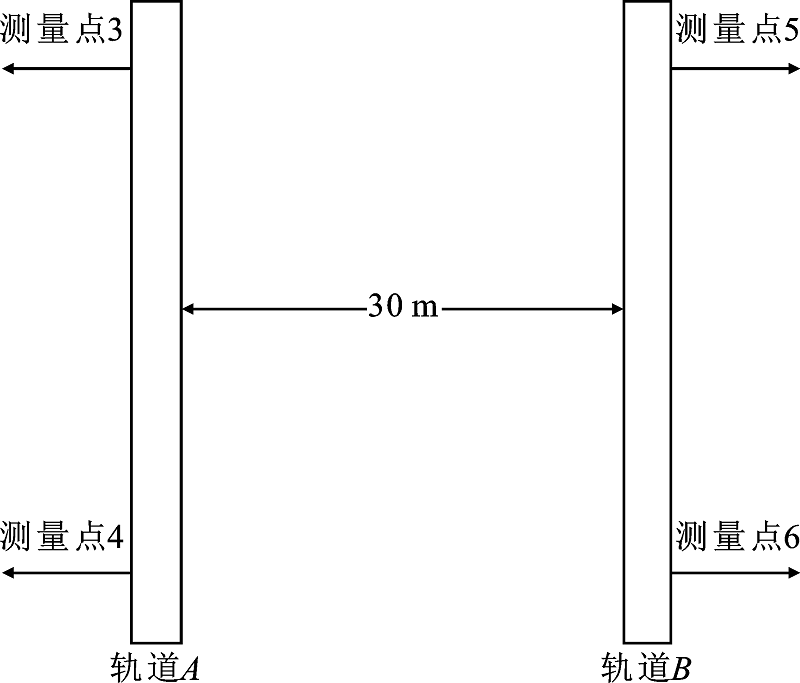
Table 2.
Altitude difference detection result"
| 次数 | Δh'1检测 结果/mm | Δh'1检测 误差/mm | Δh'2检测 结果/mm | Δh'2检测 误差/mm |
|---|---|---|---|---|
| 1 | 15.7 | 1.4 | 9.3 | -1.1 |
| 2 | 15.3 | 1.0 | 12.0 | 1.6 |
| 3 | 13.1 | -1.2 | 12.2 | 1.8 |
| 4 | 15.6 | 1.3 | 11.8 | 1.4 |
| 5 | 16.0 | 1.7 | 9.7 | -0.7 |
| 平均值 | 15.1 | 0.8 | 11.0 | 0.6 |
| [1] | 刘超. 起重机检验中“啃轨”问题分析[J]. 科学技术创新, 2018(5):40-41. |
| Liu Chao. Analysis of "rail gnawing" in crane inspection[J]. Scientific and Technological Innovation, 2018(5):40-41. | |
| [2] | 丁克勤, 王志杰, 赵娜, 等. 大型起重机械结构健康监测技术研究进展[J]. 起重运输机械, 2012(8):1-4. |
| Ding Keqin, Wang Zhijie, Zhao Na, et al. Research advances in structural health monitoring technology for large hoisting machinery[J]. Hoisting and Conveying Machinery, 2012(8):1-4. | |
| [3] | 孙远韬, 章增增, 张氢, 等. 基于全站仪及轨道机器人的桥式起重机轨道检测[J]. 起重运输机械, 2017(8):1-3. |
| Sun Yuantao, Zhang Zengzeng, Zhang Qing, et al. Bridge crane track inspection based on total station and railway robot[J]. Hoisting and Conveying Machinery, 2017(8):1-3. | |
| [4] | 孔庆彬, 程维明. 基于全站仪的新型起重机轨道检测仪设计[J]. 化工自动化及仪表, 2015, 42(5):504-506. |
| Kong Qingbin, Cheng Weiming. Design of new crane rail detector based on total station[J]. Control and Instruments in Chemical Industry, 2015, 42(5):504-506. | |
| [5] | 张世杰, 李家飞, 梁秀霞. 桥式起重机轨道维修与调整[J]. 设备管理与维修, 2017(9):74-75. |
| Zhang Shijie, Li Jiafei, Liang Xiuxia. Overhead crane track maintenance and adjustment[J]. Plant Maintenance Engineering, 2017(9):74-75. | |
| [6] | 余杰, 杭杰. 起重机械轨道测量装置及检测方法的研究[J]. 中国特种设备安全, 2016, 32(9):21-25. |
| Yu Jie, Hang Jie. Research on measuring device and measuring method of crane rails[J]. China Special Equipment Safety, 2016, 32(9):21-25. | |
| [7] | 马学文, 李鹏. 桥(门)式起重机轨距偏差检测现状及发展[J]. 建设机械技术与管理, 2012, 25(10):82-84. |
| Ma Xuewen, Li Peng. The status quo and the development to detect track centre deviation of overhead travelling crane or portal bridge crane[J]. Construction Machinery Technology & Management, 2012, 25(10):82-84. | |
| [8] | 康飞. 基于机器视觉的轨道检测系统研究[D]. 兰州:兰州交通大学, 2014. |
| Kang Fei. Research on track detection system based on machine vision[D]. Lanzhou:Lanzhou Jiaotong University, 2014. | |
| [9] | Yoshihiro T, Yamamoto R I. Rail flaw detection technologies for maintaining the stable transport of railway[J]. Journal of Japanese Society of Tribologists, 2017, 62(11):679-684. |
| [10] | 葛雯, 高立群, 石振刚. 一种基于小波提升变换的多尺度边缘提取算法[J]. 东北大学学报(自然科学版), 2007(4):473-476. |
| Ge Wen, Gao Liqun, Shi Zhengang. An algorithm based on wavelet lifting transform for extraction of multi-scale edge[J]. Journal of Northeastern University(Natural Science), 2007(4):473-476. | |
| [11] | 刘博峰, 郜丽鹏. 基于FPGA的Sobel图像边缘检测算法[J]. 应用科技, 2016, 43(6):59-61. |
| Liu Bofeng, Gao Lipeng. Sobel image edge detection method based on FPGA[J]. Applied Science and Technology, 2016, 43(6):59-61. | |
| [12] | 范晞, 费胜巍, 储有兵. 基于Canny算子的改进型图像边缘提取算法[J]. 自动化与仪表, 2019, 34(1):41-44. |
| Fan Xi, Fei Shengwei, Chu Youbing. Improved algorithm for image edge extraction based on Canny operator[J]. Automation & Instrumentation, 2019, 34(1):41-44. | |
| [13] | 孙汝萍. 一种改进的图像边缘提取方法[J]. 科技通报, 2018, 34(10):158-161. |
| Sun Ruping. An improved image edge extraction method[J]. Bulletin of Science and Technology, 2018, 34(10):158-161. | |
| [14] | 张绍堂, 吴鸿, 宁德琼. 一种高精度的激光图像光斑中心检测方法[J]. 激光杂志, 2018, 39(8):153-156. |
| Zhang Shaotang, Wu Hong, Ning Deqiong. A high-accuracy detection method for laser image spot center[J]. Laser Journal, 2018, 39(8):153-156. | |
| [15] |
Nuckolls J, Wood L, Thiessen A, et al. Laser compression of matter to super-high densities: thermonuclear(CTR) application[J]. Nature, 1972, 239(5368):139-142.
doi: 10.1038/239139a0 |
| [16] | Meng L Q, Kong Q Q, Ji K H, et al. Characterization of beam quality of unstable laser beams with the multiple hyperbolas method[J]. Results in Physics, 2019(12):38-45. |
| [17] | 张惠, 李国平, 张勇, 等. 基于三维反正切函数拟合的光斑质心提取算法[J]. 红外与激光工程, 2019, 48(2):268-275. |
| Zhang Hui, Li Guoping, Zhang Yong, et al. Spot centroid extraction algorithm based on three-dimensional arctangent function fitting[J]. Infrared and Laser Engineering, 2019, 48(2):268-275. | |
| [18] | 叶大华. 高斯光束特性分析及其应用[J]. 激光技术, 2019, 43(1):142-146. |
| Ye Dahua. Analysis of characteristic of Gaussian beam and its application[J]. Laser Technology, 2019, 43(1):142-146. | |
| [19] | 吴頔, 吕且妮, 卢琳, 等. 基于互相关和改进高斯拟合的光斑中心提取方法[J]. 光电子·激光, 2017, 28(2):202-210. |
| Wu Di, Lü Qieni, Lu Lin, et al. Spot center extraction method based on cross-correlation and improved Gaussian fitting[J]. Journal of Optoelectronics·Laser, 2017, 28(2):202-210. | |
| [20] | Goh T Y, Basah S N, Yazid H, et al. Performance analysis of image thresholding: Otsu technique[J]. Measurement, 2018, 11(4):298-307. |
| [21] | 袁小翠, 黄志开, 马永力, 等. Otsu阈值分割法特点及其应用分析[J]. 南昌工程学院学报, 2019, 38(1):85-90. |
| Yuan Xiaocui, Huang Zhikai, Ma Yongli, et al. Analysis of characteristics and application of Otsu threshold method[J]. Journal of Nanchang Institute of Technology, 2019, 38(1):85-90. | |
| [22] |
Guo W Y, Wang X F, Xia X Z. Two-dimensional Otsu’s thresholding segmentation method based on grid box filter[J]. Optik, 2014, 125(18):5234-5240.
doi: 10.1016/j.ijleo.2014.05.003 |
| [23] | 穆娟. 利用圆拟合进行激光光斑中心检测[J]. 舰船科学技术, 2016, 38(24):127-129. |
| Mu Juan. Laser spot center detection based on circle fitting[J]. Ship Science and Technology, 2016, 38(24):127-129. |
| [1] | MA Ding,WU Dingxiang,TANG Lijun. Research on the Defect Method of Detection Circular Ceramic Metal Coating [J]. Electronic Science and Technology, 2021, 34(6): 28-33. |
| [2] | YANG Lingxiao,WANG Zhenying,LIU Qunpo,WANG Gaowei,YANG Yanchao. Study of Apple Coloration Detection Algorithm Based on H-S Histogram [J]. Electronic Science and Technology, 2021, 34(5): 13-17. |
| [3] | SONG Zhangming,HE Huiyong,HUANG Yuejun. Study on On-Line Detection of Surface Defects of Flat Enameled Wire [J]. Electronic Science and Technology, 2021, 34(5): 72-78. |
| [4] | YAN Chao,SUN Zhanquan,TIAN Engang,ZHAO Yangyang,FAN Xiaoyan. Research Progress of Medical Image Segmentation Based on Deep Learning [J]. Electronic Science and Technology, 2021, 34(2): 7-11. |
| [5] | CHEN Wenyou,ZHANG Wei,SHI Xiaofan,SONG Fang. A Semi-Dense 3D Reconstruction ORB-SLAM Algorithm with Improved ORB Feature Matching [J]. Electronic Science and Technology, 2021, 34(12): 62-67. |
| [6] | ZHANG Tianhao,LI Haolin. A Method of Laser Center Extraction Based on Gaussian Fitting [J]. Electronic Science and Technology, 2020, 33(5): 72-76. |
| [7] | SHI Weizhong,CAO Weiwei,FAN Yanming,DONG Jiajun,CHEN Shu,XIAO Hao. FPGA-Based Real-Time Edge Detection and its Implementation for Deep-Space Images [J]. Electronic Science and Technology, 2020, 33(5): 45-49. |
| [8] | QIN Xing,GAO Xiaoqi,CHEN Bin. Image Super-resolution Algorithm Based on SqueezeNet Convolution Neural Network [J]. Electronic Science and Technology, 2020, 33(5): 1-8. |
| [9] | XIE Zhixuan,YAO Hongbing,FAN Ning,CHEN Feng. Connected Domain Label Detection Algorithm for Multi-target Lens [J]. Electronic Science and Technology, 2020, 33(4): 50-54. |
| [10] | ZHAN Yan,ZHANG Juan. A Domain Adaptive Depth Estimation Method for Structural Perception Loss [J]. Electronic Science and Technology, 2020, 33(12): 12-16. |
| [11] | YANG Yunhui. Research on Workpiece Location Technology Based on Monocular Vision [J]. Electronic Science and Technology, 2019, 32(12): 72-75. |
| [12] | KANG Xiu-Juan, SHI Zhan. A System of Foreign Object Localization Based on Graphics Processing [J]. , 2018, 31(1): 71-. |
| [13] | ZHANG Jiajia,YANG Zhenchao,ZHOU Lü. The Cores Sorting System Research Using Image Processing Based on Matlab [J]. , 2017, 30(9): 50-. |
| [14] | YANG Zhenchao,ZHANG Jiajia,ZHOU Lü,WU Fei. Potato Sorting Technology Research Using LabVIEW [J]. , 2017, 30(9): 72-. |
| [15] | CAO Weidong, ZHANG Zhongwei . Use of Machine Vision in Counting of the People in Building Lift [J]. , 2016, 29(9): 22-. |
|
