Electronic Science and Technology ›› 2024, Vol. 37 ›› Issue (7): 33-42.doi: 10.16180/j.cnki.issn1007-7820.2024.07.005
Previous Articles Next Articles
LI Jun, LIU Hu, YANG Haima, WANG Yuan, XU Wencheng, HUANG Hongxin
Received:2023-01-29
Online:2024-07-15
Published:2024-07-17
Supported by:CLC Number:
LI Jun, LIU Hu, YANG Haima, WANG Yuan, XU Wencheng, HUANG Hongxin. Research on AGV Path Fusion of Object Detection and DWA Algorithm[J].Electronic Science and Technology, 2024, 37(7): 33-42.

Figure 1.
CBAM attention mechanism module"
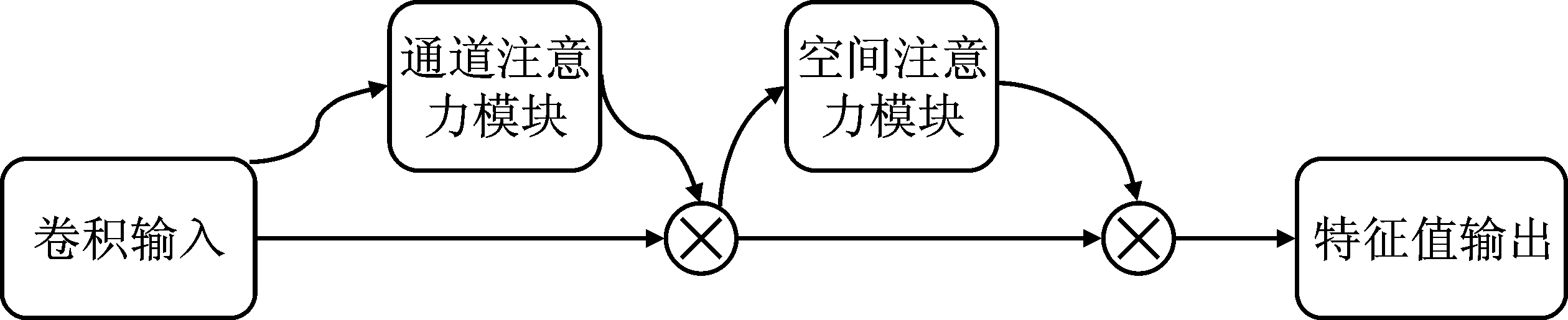
Figure 2.
Channel attention module"
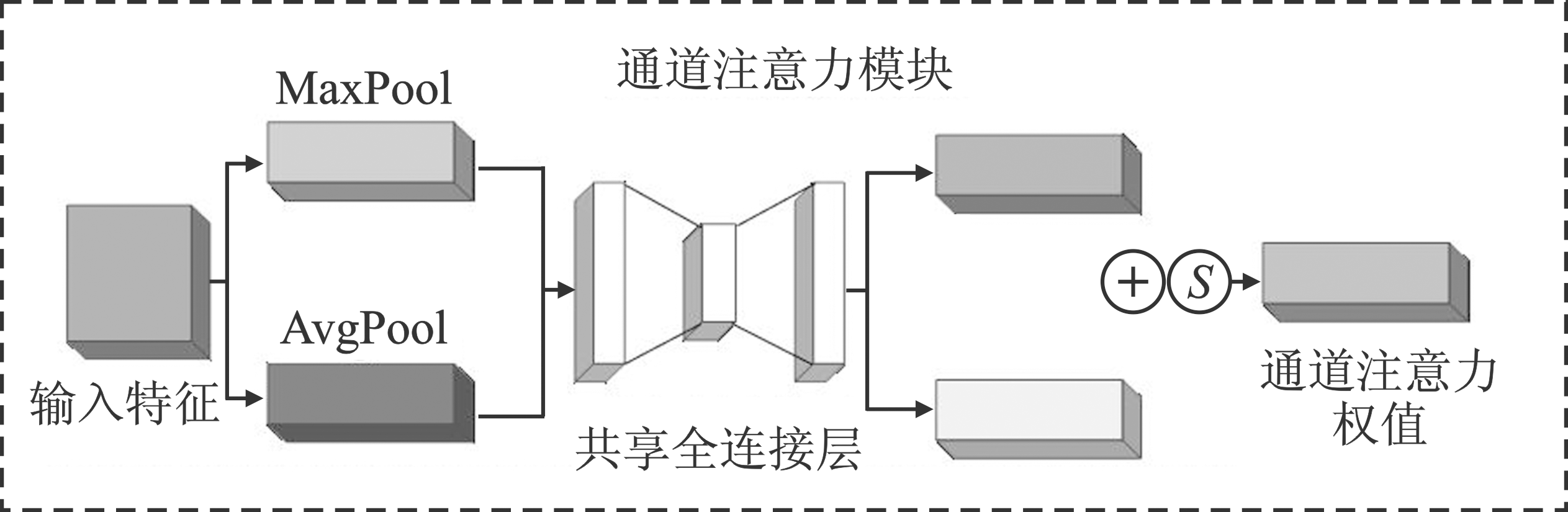
Figure 3.
Spatial attention module"
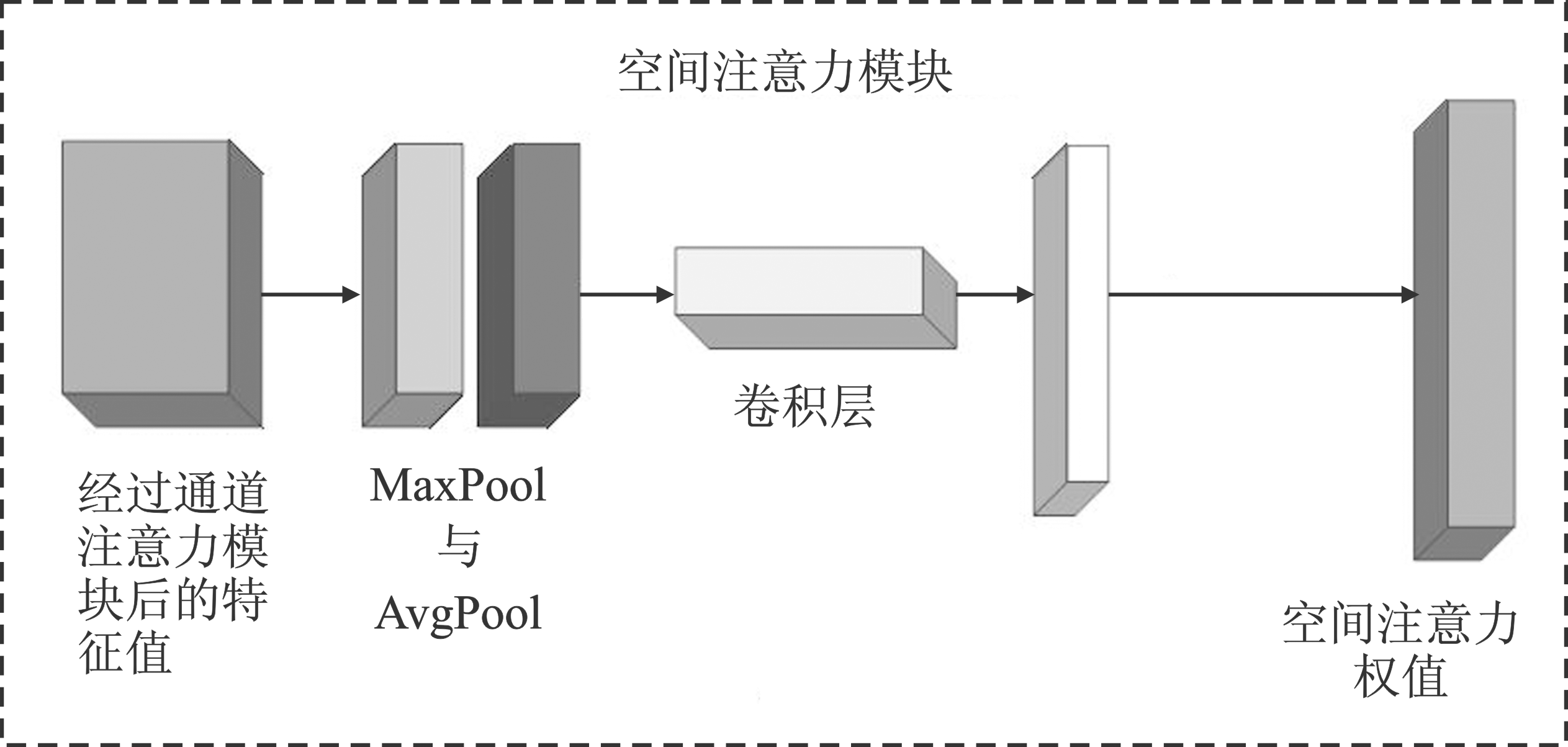
Figure 4.
Improved YOLOv5s network model"
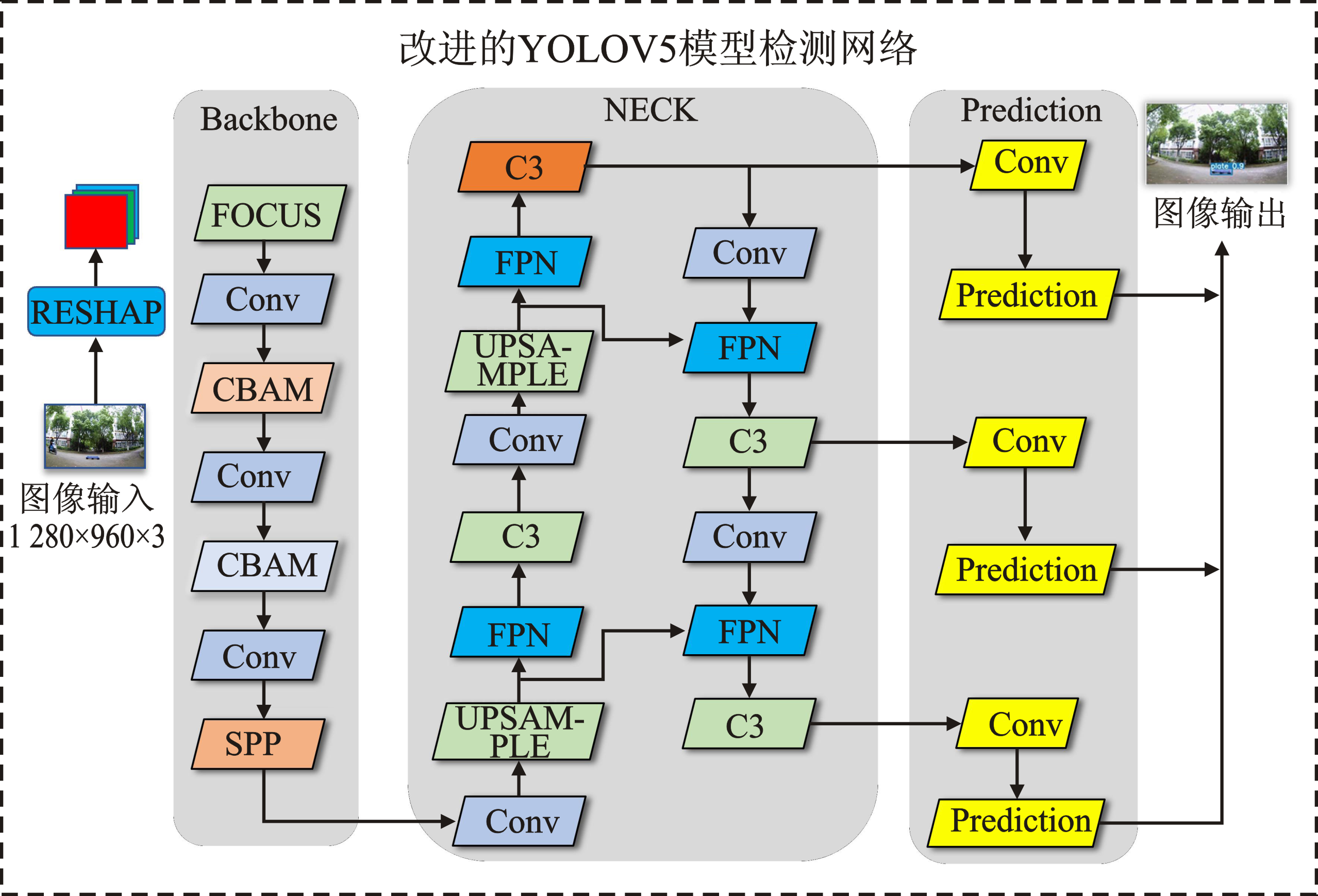

Figure 5.
GIoU identifies prediction box"
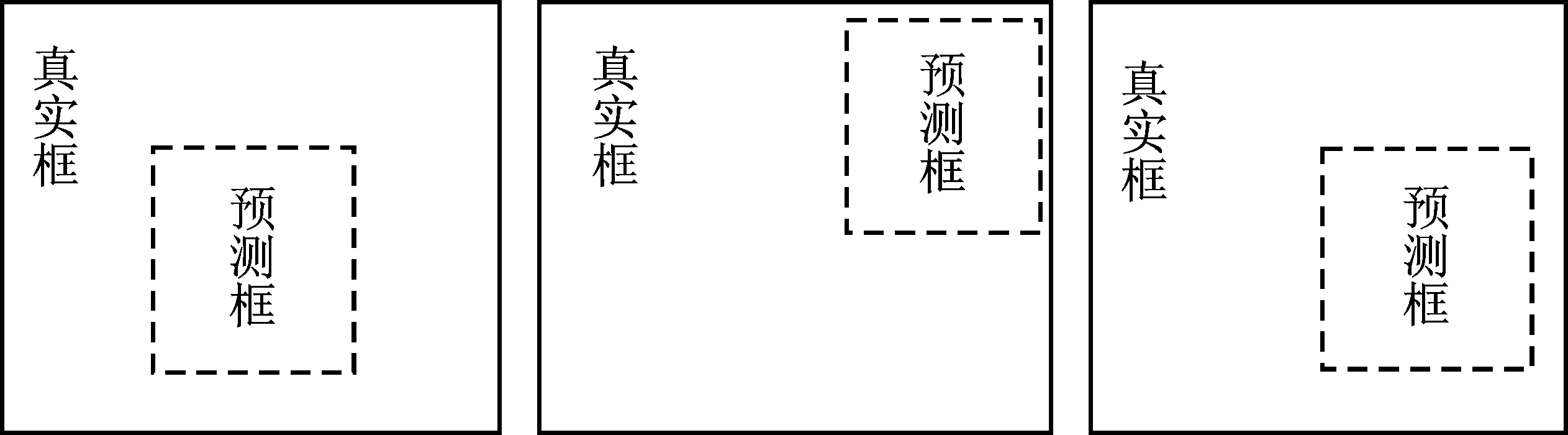

Figure 6.
Path planning (a)Global path (b)Type C path"
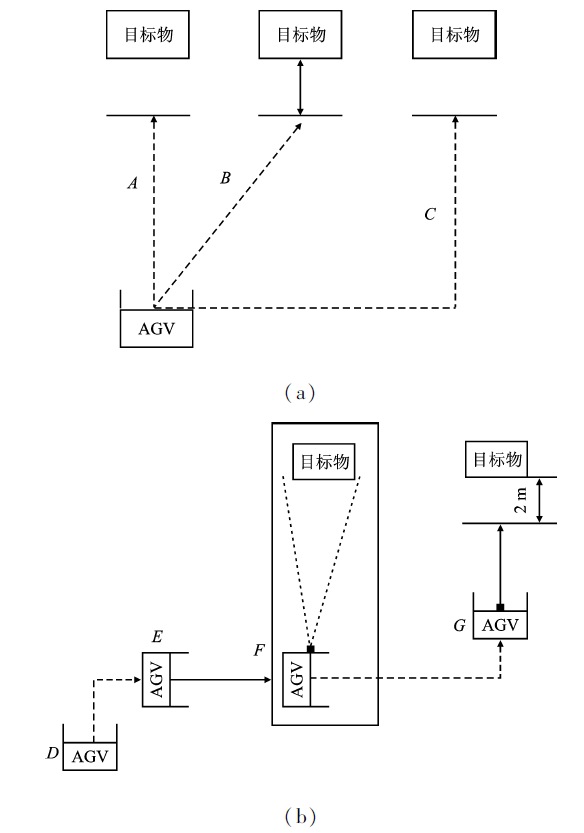
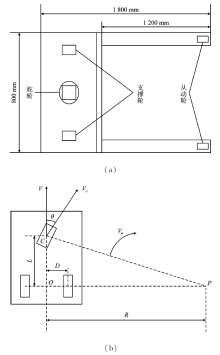
Figure 7.
Structure and kinematic model of forklift truck (a)Forklift structure and dimensions (b)Kinematics model of forklift truck"
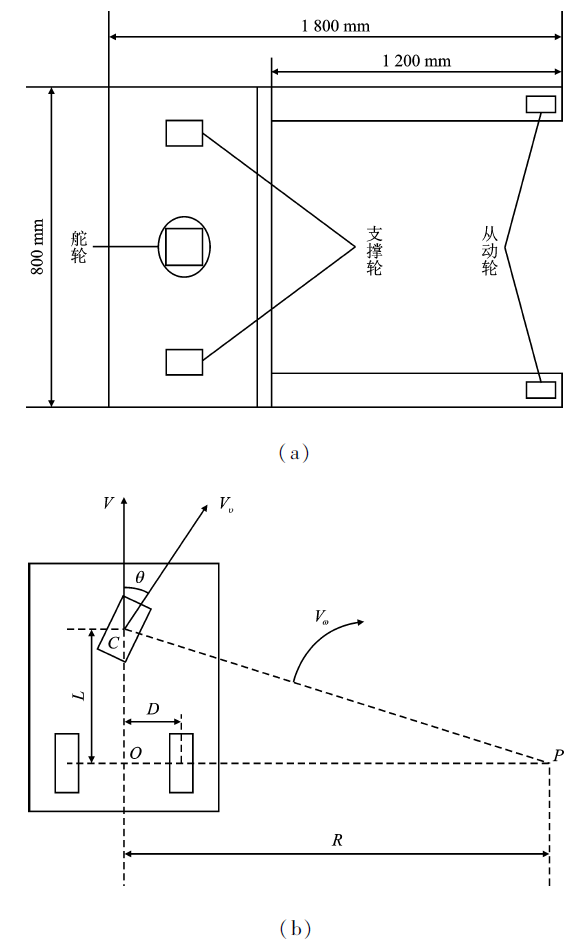
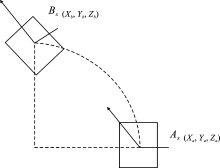
Figure 8.
Trajectory model of AGV forklift truck"
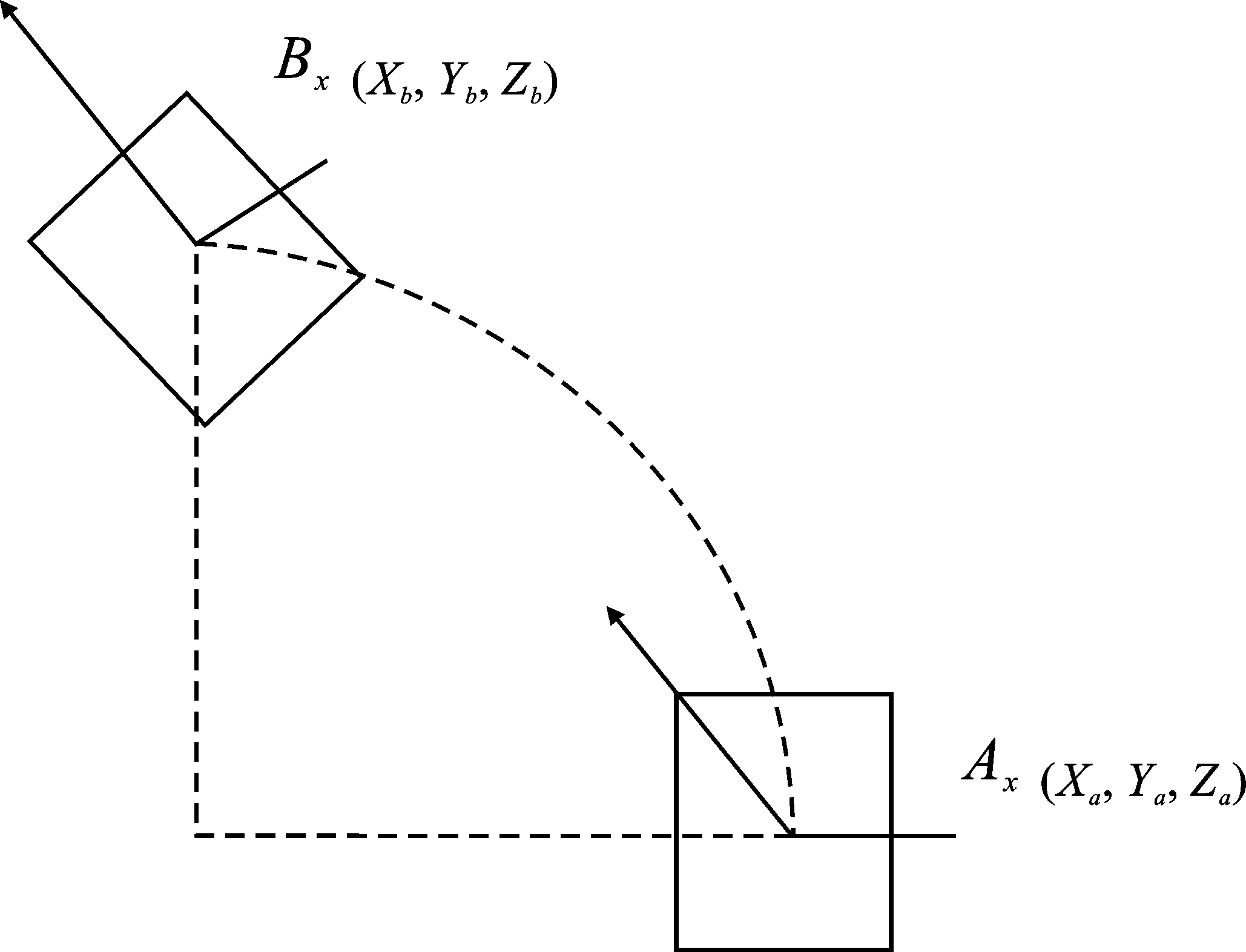
Figure 9.
Evaluation function"

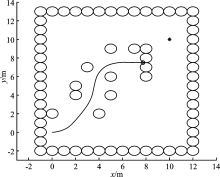
Figure 10.
C-type obstacle"
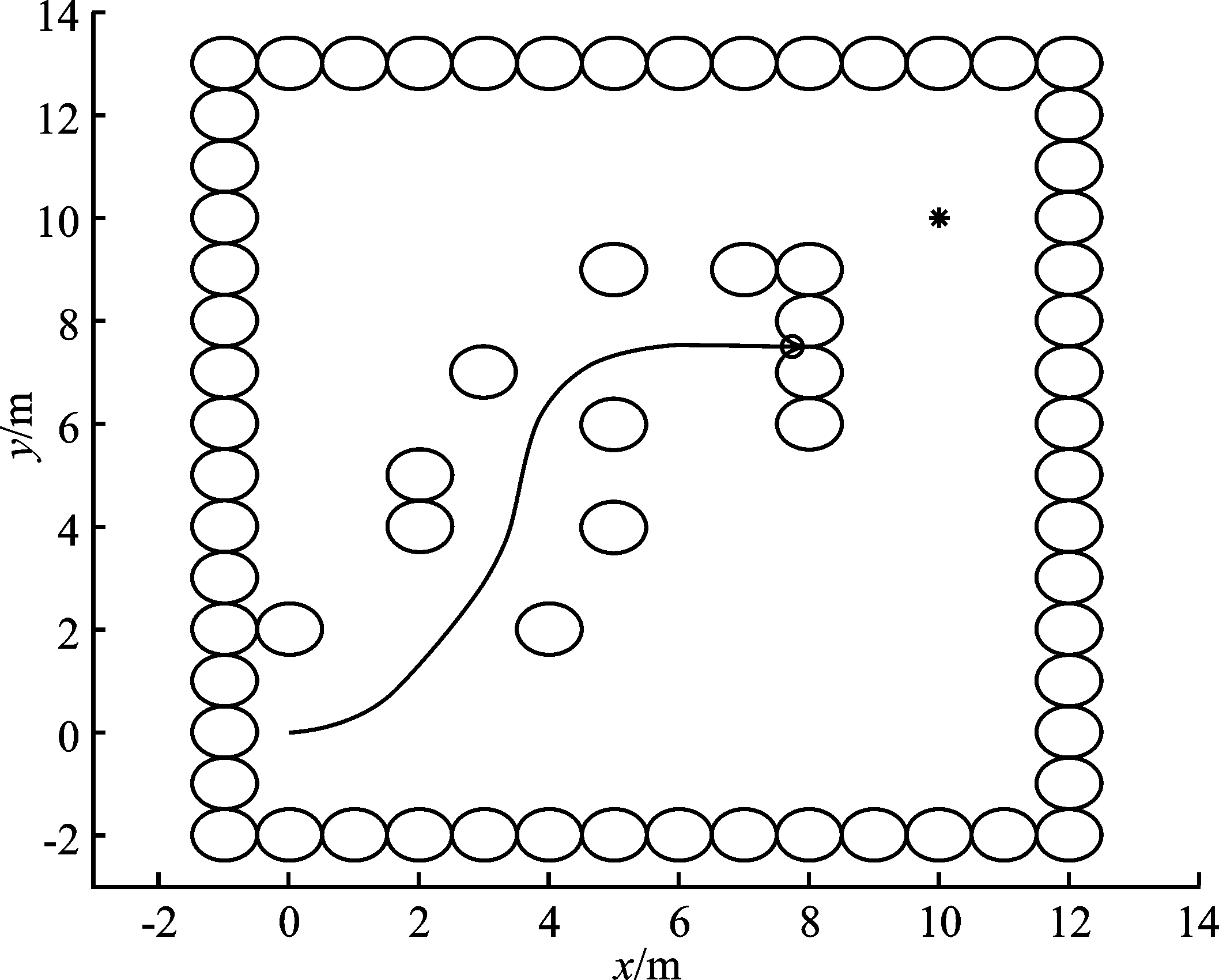
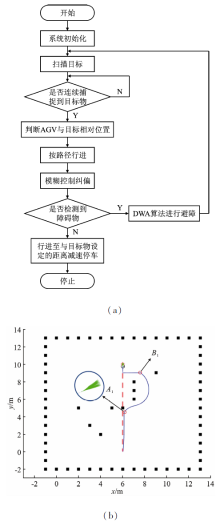
Figure 11.
Fusion path algorithm (a)Flow of fusion path algorithm (b)Fusion path simulation"

Figure 12.
Data set and test set (a)Training set (b)Verification set (c)Test set"
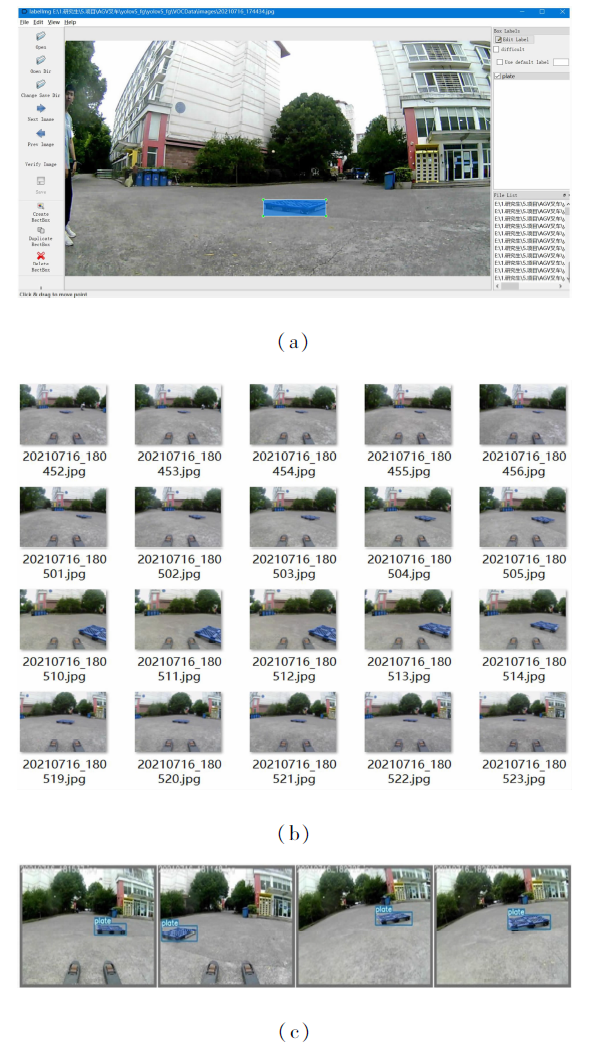

Figure 13.
Comparative experiment of object detection"

Table 1.
Comparison of different target detection algorithms"
| 网络模型 | 精度/% | FPS/frame·s-1 |
|---|---|---|
| 改进YOLOv5s | 90 | 30 |
| 原YOLOv5s | 85 | 31 |
| YOLOv5m | 83 | 25 |
| YOLOv5l | 87 | 26 |
| Faster RCNN | 92 | 19 |
| SSD | 75 | 26 |

Figure 14.
DWA simulation experiment (a)Performance comparison of sparse obstacles (b)Performance comparison of dense obstacles (c)Performance comparison of C-type obstacles (d)Random obstacles in path A (e)Random obstacles in path B (f)Random obstacles in path C"

Table 2.
Performance comparison of sparse obstacles"
| 路径长度/m | 耗费时间/s | 航向角度/(°) | |
|---|---|---|---|
| 基础DWA路径 | 15.268 | 27.2 | -7 |
| 融合DWA路径 | 13.221 | 25.8 | 2 |
| 提升效果 | 减少13% | 减少5% | - |
Table 3.
Performance comparison of dense obstacles"
| 路径长度/m | 耗费时间/s | 航向角度/(°) | |
|---|---|---|---|
| 基础DWA路径 | 20.586 | 30.8 | 1 |
| 融合DWA路径 | 13.924 | 26.2 | 5 |
| 提升效果 | 减少32% | 减少13% | - |
Table 4.
Performance comparison of C-type obstacles"
| 路径长度/m | 耗费时间/s | 航向角度/(°) | |
|---|---|---|---|
| 基础DWA路径 | - | - | - |
| 融合DWA路径 | 16.852 | 29.5 | 1 |
| 提升效果 | - | - | - |
Table 5.
Random obstacles in path A"
| 路径长度/m | 耗费时间/s | 航向角度/(°) | |
|---|---|---|---|
| 基础DWA路径 | 14.515 | 26.2 | -50 |
| 融合DWA路径 | 13.235 | 25.6 | 0 |
| 提升效果 | 减少7% | 减少2% | - |
Table 6.
Random obstacles in path B"
| 路径长度/m | 耗费时间/s | 航向角度/(°) | |
|---|---|---|---|
| 基础DWA路径 | 16.541 | 27.8 | -40 |
| 融合DWA路径 | 14.332 | 26.5 | 4 |
| 提升效果 | 减少12% | 减少4% | - |
Table 7.
Random obstacles in path C"
| 路径长度/m | 耗费时间/s | 航向角/(°) | |
|---|---|---|---|
| 基础DWA路径 | 18.025 | 28.3 | 90 |
| 融合DWA路径 | 18.651 | 28.5 | 2 |
| 提升效果 | 增加3% | 增加1% | - |
| [1] |
杨海兰, 祁永强, 荣丹. 仓储环境下基于忆阻强化学习的AGV路径规划[J]. 计算机工程与应用, 2023, 59(17):318-327.
doi: 10.3778/j.issn.1002-8331.2204-0491 |
|
Yang Hailan, Qi Yongqiang, Rong Dan. AGV path planning based on memristor reinforcement learning in warehouse environment[J]. Computer Engineering and Applications, 2023, 59(17):318-327.
doi: 10.3778/j.issn.1002-8331.2204-0491 |
|
| [2] | 张辰贝西, 黄志球. 自动导航车(AGV)发展综述[J]. 中国制造业信息化, 2010, 39(1):53-59. |
| Zhang Chenbeixi, Huang Zhiqiu. Evolution summarization of automated guided vehicles(AGV)[J]. Machine Design and Manufacturing Engineering, 2010, 39(1):53-59. | |
| [3] |
赵晓, 王铮, 黄程侃, 等. 基于改进A*算法的移动机器人路径规划[J]. 机器人, 2018, 40(6):903-910.
doi: 10.13973/j.cnki.robot.170591 |
| Zhao Xiao, Wang Zheng, Huang Chengkan, et al. Mobile robot path planning based on improved A* algorithm[J]. Robot, 2018, 40(6):903-910. | |
| [4] | Zuo L, Guo Q, Xu X, et al. A hierarchical path planning approach based on A and least-squares policy iteration for mobile robots[J]. Neurocomputing, 2015, 170(6):257-266. |
| [5] | Yong D, Chen Y, Zhang Y, et al. Fuzzy Dijkstra algorithm for shortest path problem under uncertain environment[J]. Applied Soft Computing, 2012, 12(3):1231-1237. |
| [6] | Liu J, Yang J, Liu H, et al. An improved ant colony algorithm for robot path planning[J]. Soft Computing, 2017, 21(19):5829-5839. |
| [7] | Tao Q, Sang H, Guo H, et al. Improved particle swarm optimization algorithm for AGV path planning[J]. IEEE Access, 2021(9):33522-33531. |
| [8] | Chen X, Gao P. Path planning and control of soccer robot based on genetic algorithm[J]. Journal of Ambient Intelligence and Humanized Computing, 2019(1):1-10. |
| [9] | Bai X, Jiang H, Cui J, et al. UAV path planning based on improved A * and DWA algorithms[J]. International Journal of Aerospace Engineering, 2021(3):1-12. |
| [10] | Szczepanski R, Bereit A, Tarczewski T. Efficient local path planning algorithm using artificial potential field supported by augmented reality[J]. Energies, 2021, 14(20):6642-6650. |
| [11] | Seelinger M, Yoder J D. Automatic pallet engagement by a vision guided forklift[C]. Montreal: Proceedings of the IEEE International Conference on Robotics and Automation, 2005:902-908. |
| [12] | 陈显宝, 金隼, 罗磊, 等. 基于视觉定位的AGV定位精度提高方法[J]. 机械设计与研究, 2021, 37(1):36-40. |
| Chen Xianbao, Jin Sun, Luo Lei, et al. AGV parking accuracy improvement method based on visual positioning[J]. Machine Design and Research, 2021, 37(1):36-40. | |
| [13] | 梁礼明, 邓广宏, 卢明建, 等. 基于改进YOLOv3的有遮挡行人检测[J]. 传感器与微系统, 2020, 39(5):148-151. |
| Liang Liming, Deng Guanghong, Lu Mingjian, et al. Blocked pedestrian detection based on improved YOLOv3[J]. Transducer and Microsystem Technologies, 2020, 39(5):148-151. | |
| [14] | 潘卫国, 刘博, 陈英昊, 等. 基于YOLOv3的交通标志牌检测识别[J]. 传感器与微系统, 2019, 38(11):147-150. |
| Pan Weiguo, Liu Bo, Chen Yinghao, et al. Traffic sign detection and recognition based on YOLOv3[J]. Transducer and Microsystem Technologies, 2019, 38(11):147-150. | |
| [15] | 孔繁望. 基于不同型式AGV的建模及轨迹跟踪控制方法的设计和应用[D]. 杭州: 浙江大学, 2018:63-66. |
| Kong Fanwang. Research on modeling and trajectory of AGVs of different typesand design and application racking control methods of different types of AGV[D]. Hangzhou: Zhejiang University, 2018:63-66. | |
| [16] | Tao W, Daichuan Y, Weifeng L, et al. A novel integrated path planning algorithm for warehouse AGVs[J]. Chinese Journal of Electronics, 2021, 30(2):331-338. |
| [17] | 程长文, 陈玮, 陈劲宏, 等. 改进YOLO的口罩佩戴实时检测方法[J]. 电子科技, 2023, 36(2):73-80. |
| Chen Changwen, Chen Wei, Chen Jinhong, et al. YOLO-improve detection method of real-time mask wearing[J]. Electronic Science and Technology, 2023, 36(2):73-80. | |
| [18] | 张伟, 刘娜, 江洋, 等. 基于YOLO神经网络的垃圾检测与分类[J]. 电子科技, 2022, 35(10):45-50. |
| Zhang Wei, Liu Na, Jiang Yang, et al. Garbage detectionand classification based on YOLO neural network[J]. Electronic Science and Technology, 2022, 35(10):45-50. |
| [1] | HE Xing, HUANG Yongming, ZHU Yong. Pavement Pothole Detection Method Based on Improved YOLOv5 [J]. Electronic Science and Technology, 2024, 37(7): 53-59. |
| [2] | WANG Xinyu, ZHAO Jingwen, LIU Xiang, SHI Yunyu, SHE Yunlang. YOLOv3 Lung Nodule Detection Based on Coordinate Attention [J]. Electronic Science and Technology, 2024, 37(6): 1-7. |
| [3] | YE Yuxin, JU Zhiyong, LAI Ying. Traffic Sign Detection Algorithm Incorporating Receptive Field Enhancement Module and Attention Mechanism [J]. Electronic Science and Technology, 2024, 37(6): 8-16. |
| [4] | XIA Rongcheng, LIU Deer. Vehicle Detection and Analysis in Urban Waterlogging Area Based on Deep Learning [J]. Electronic Science and Technology, 2024, 37(5): 18-24. |
| [5] | WANG Yanchun, GUO Yongfeng, XIA Ying, WANG Yangyang. Research on Robot Global Path Planning Based on Improved Ant Colony Algorithm [J]. Electronic Science and Technology, 2024, 37(5): 88-94. |
| [6] | LIANG Chenye, ZHANG Xuanxiong. Research on Multiclass Garbage Classification Algorithm Based on Improved MobileNet Network [J]. Electronic Science and Technology, 2024, 37(4): 38-46. |
| [7] | WANG Xiaozhu,YU Lianzhi. Small Object Detection Based on Convolution and Self-Attention of Aggregation [J]. Electronic Science and Technology, 2024, 37(2): 14-22. |
| [8] | LU Minlong,GUO Wei,ZHANG Xuanxiong. UWB/PDR Pedestrian Localization System Based on Adaptive UKF [J]. Electronic Science and Technology, 2023, 36(6): 41-49. |
| [9] | LI Keran,CHEN Sheng,KE Panpan. A Method of Facial Mask Segmentation Based on CA-Net [J]. Electronic Science and Technology, 2023, 36(6): 64-71. |
| [10] | SHI Jianke,QIAO Meiying,LI Bingfeng,ZHAO Yan. Underwater Occlusion Target Detection Algorithm Based on Attention Mechanism [J]. Electronic Science and Technology, 2023, 36(5): 62-70. |
| [11] | CHENG Changwen,CHEN Wei,CHEN Jinhong,YIN Zhong. YOLO-Improve Detection Method of Real-Time Mask Wearing [J]. Electronic Science and Technology, 2023, 36(2): 73-80. |
| [12] | ZHANG Manjie,YANG Fangyan,JI Yunfeng. Research Progress of Body Posture Estimation in Ball Games [J]. Electronic Science and Technology, 2023, 36(1): 28-37. |
| [13] | YANG Yingying,LIU Xiang,SHI Yunyu. An Improved Obstacle Detection Method for AGV [J]. Electronic Science and Technology, 2022, 35(9): 1-6. |
| [14] | LU Dongxiang. A Survey of Intelligent Transportation Path Planning Algorithms [J]. Electronic Science and Technology, 2022, 35(7): 22-27. |
| [15] | ZHAO Chong,CHI Mengmeng,CHU Cong,ZHANG Peng. Research on Motion Simulation and Visual Recognition Algorithm of Guide Dog Walking Mechanism [J]. Electronic Science and Technology, 2021, 34(9): 66-72. |
|
||
