| [1] |
Mason J, Ricco S, Parr R. Textured occupancy grids for monocular localization without feature[C]. Shanghai: IEEE International Conference on Robotics and Automation, 2011.
|
| [2] |
Smith R, Cheeseman P. On the representation and estimation of spatial uncertainty[J]. International Journal of Robotics Research, 2009,5(4):56-68.
|
| [3] |
Keller J. Navy issues urgent order to equip MQ-8 UAV helicopter with maritime surveillance radar[J]. Military and Aerospace Electronics, 2013,24(2):31-32.
|
| [4] |
梅武军. 基于ROS的多旋翼飞行器飞行控制系统的开发与设计[J]. 电子科技, 2017,30(10):23-25.
|
|
Mei Wujun. Development and design of flight control system for multi rotor vehicle based on ROS[J]. Electronic Science and Technology, 2017,30(10):23-25.
|
| [5] |
Lin Y, Saripalli S. Sampling-based path planning for UAV collision avoidance[J]. IEEE Transactions on Intelligent Transportation Systems, 2017(99):1-14.
|
| [6] |
陈智. 基于栅格法多目标路径规划研究[D]. 武汉:华中科技大学, 2015.
|
|
Chen Zhi. Study of the method of multi-objective path planning based on grid[D]. Wuhan:Huazhong University of Science and Technology, 2015.
|
| [7] |
宗群, 王丹丹, 邵士凯, 等. 多无人机协同编队飞行控制研究现状及发展[J]. 哈尔滨工业大学学报, 2017,49(3):1-14.
|
|
Zong Qun, Wang Dandan, Shao Shikai, et al. Research status and development of multi UAV coordinated formation flight control[J]. Journal of Harbin Institute of Technology, 2017,49(3):1-14.
|
| [8] |
王松波, 李马骁, 李海瑞, 等. 基于三维激光雷达技术的输电线路廊道障碍物检测研究[J]. 电子科技, 2019,32(4):85-88.
|
|
Wang Songbo, Li Mawei, Li Hairui, et al. Research on obstacle detection of transmission line corridor based on 3D laser radar technology[J]. Electronic Science and Technology, 2019,32(4):85-88.
|
| [9] |
朱平, 甄子洋, 覃海群, 等. 基于立体视觉和光流的无人机避障算法研究[J]. 电光与控制, 2017(12):35-39.
|
|
Zhu Ping, Zhen Ziyang, Qin Haiqun, et al. Stereo vision and optical flow based obstacle avoidance algorithm for UAVs[J]. Electronics Optics and Control, 2017(12):35-39.
|
| [10] |
梁定康, 钱瑞, 陈义豪, 等. 基于视觉的无人机巡检违章违停系统设计与实现[J]. 电子科技, 2018,31(5):81-96.
|
|
Liang Dingkang, Qian Rui, Chen Yihao, et al. Design and realization of illegal violation system based on visual inspection of UAVs[J]. Electronic Science and Technology, 2018,31(5):81-96.
|
| [11] |
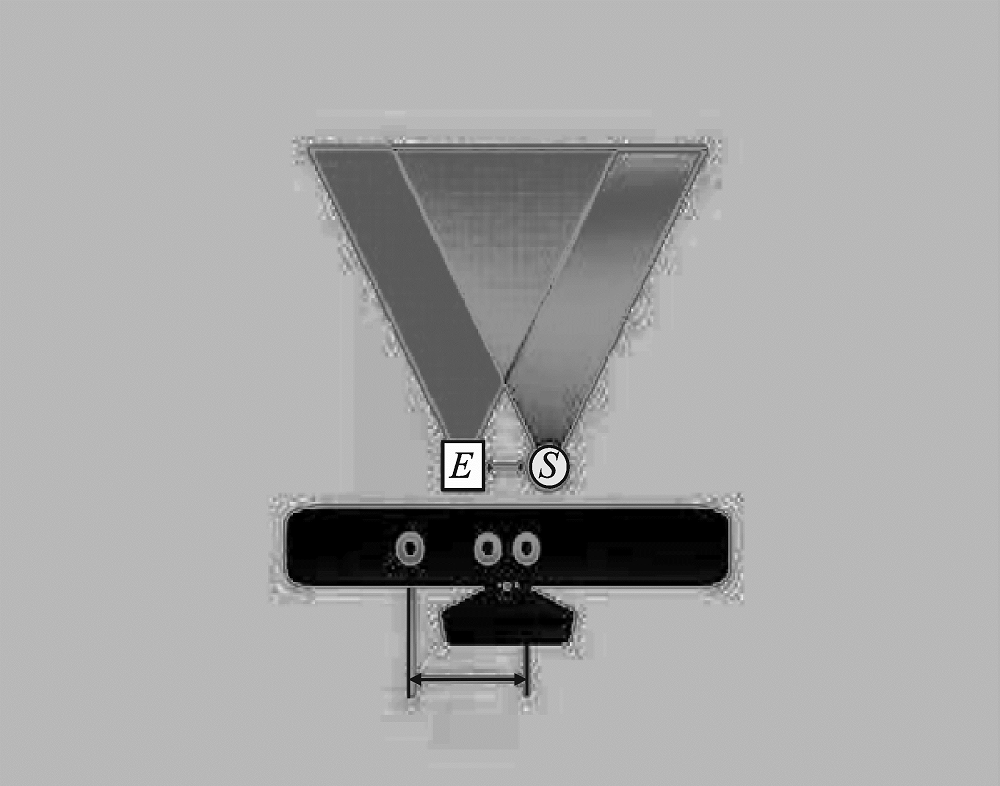
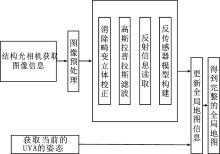
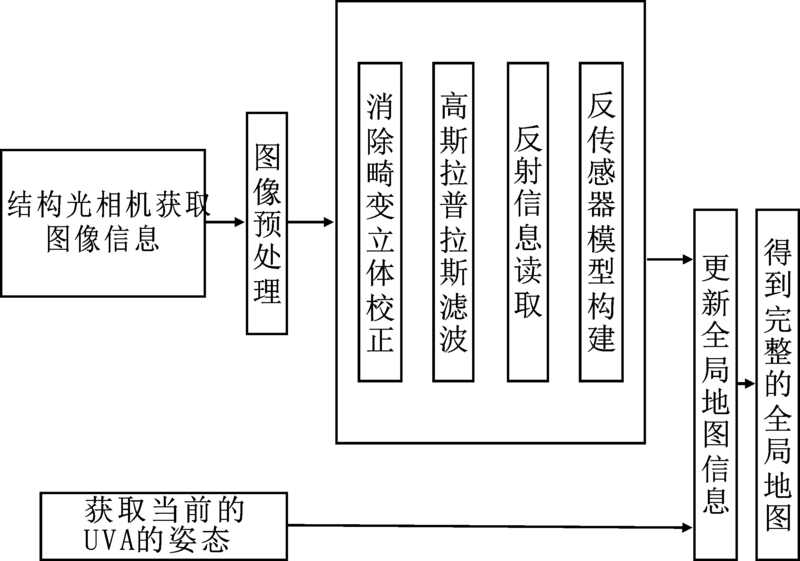
吴开华, 王文杰. 植保无人机结构光视觉的障碍物检测方法[J]. 光电工程, 2018,45(4):27-35.
|
|
Wu Kaihua, Wang Wenjie. Detection method of obstacle for plant protection UAV based on structured light vision[J]. Opto-Electronic Engineering, 2018,45(4):27-35.
|
| [12] |
Chang K, Xia Y, Huang K. UAV formation control design with obstacle avoidance in dynamic three-dimensional environment[J]. Springer Plus, 2016,5(1):1124-1138.
|
| [13] |
夏令儒, 孙首群. 多无人机协同任务规划[J]. 电子科技, 2018,31(1):20-25.
|
|
Xia Lingru, Sun Shouqun. Planning route for UAV cooperative combat[J]. Electronic Science and Technology, 2018,31(1):20-25.
|
| [14] |
毛晨悦, 吴鹏勇. 基于人工势场法的无人机路径规划避障算法[J]. 电子科技, 2019,32(7):65-70.
|
|
Mao Chenyue, Wu Pengyong. UAV path planning obstacle avoidance algorithm based on artificial potential field method[J]. Electronic Science and Technology, 2019,32(7):65-70.
|
| [15] |
Silva J B B, Siebra C A, Nascimento T P D. A new cost function heuristic applied to A * based path planning in static and dynamic environments [C]. Arlington:Latin American Robotics Symposium,IEEE, 2016.
|
| [16] |
刘海波, 李冀. 浅析无人机自动避障系统[J]. 中国计量, 2017(9):84-85.
|
|
Liu Haibo, Li Ji. Analysis of automatic obstacle avoidance system for UAV[J]. China Metrology, 2017(9):84-85.
|
| [17] |
成浩浩, 齐晓慧, 杨森, 等. 一种基于一致性的四旋翼无人机编队避障方法[J]. 飞行力学, 2019,37(2):54-58.
|
|
Cheng Haohao, Qi Xiaohui, Yang Sen, et al. A method for obstacle avoidance of consistency based quadrotor UAV formation[J]. Flight Dynamics, 2019,37(2):54-58.
|