| [1] |
Zhou Y, Tuzel O. Voxelnet:End-to-end learning for poi-nt cloud based 3D object detection[C]. Salt Lake City: Co-mputer Vision and Pattern Recognition, 2018:4490-4499.
|
| [2] |
Simony M, Milzy S, Amendey K, et al. Complex-YOLO:Aneuler-region-proposal for real-time 3D object det-ection on point clouds[C]. Munich: European Conference on Computer Vision, 2018:197-209.
|
| [3] |
Lang A H, Vora S, Caesar H, et al. PointPillars:Fast enc-oders for object detection from point clouds[C]. Long Beach: Computer Vision and Pattern Recognition, 2019:12697-12705.
|
| [4] |
Qi C R, Su H, Mo K, et al. PointNet:Deep learning on point sets for 3D classification and segmentation[C]. Honolulu: Computer Vision and Pattern Recognition, 2017:652-660.
|
| [5] |
Woo S, Park J, Lee J Y, et al. CBAM:Convolutional block attention module[C]. Munich: European Conference on Computer Vision, 2018:3-19.
|
| [6] |
Miao Z, Chen J, Pan H, et al. PVGNet:A bottom-up one-stage 3D object detector with integrated multi-level features[C]. Kuala Lumpur: Computer Vision and Pattern Recognition, 2021:3279-3288.
|
| [7] |
Wang Z, Xie Q, Lai Y K, et al. MLVSNet:Multi-level v-oting siamese network for 3D visual tracking[C]. Montreal: International Conference on Computer Vision, 2021:3101-3110.
|
| [8] |
韩磊, 高永彬, 史志才. 基于稀疏Transformer的雷达点云三维目标检测[J], 计算机工程, 2022, 49(1):1-10.
doi: 10.1063/1.31617
|
|
Han Lei, Gao Yongbin, Shi Zhicai. Three-dimensional o-bject detection of LiDAR point cloud based on sparse transformer[J], Computer Engineering, 2022, 49(1):1-10.
doi: 10.1063/1.31617
|
| [9] |
Lin T Y, Dollár P, Girshick R, et al. Feature pyramid networks for object detection[C]. Honolulu: Computer Vision and Pattern Recognition, 2017:2117-2125.
|
| [10] |
Yan Y, Mao Y, Li B. Second:Sparsely embedded convolutional detection[J]. Sensors, 2018, 18(10):3337.
doi: 10.3390/s18103337
|
| [11] |
Qiu S, Wu Y, Anwar S, et al. Investigating attention mechanism in 3D point cloud object detection[C]. London:International Conference on 3D Vision, 2021:403-412.
|
| [12] |
Bhattacharyya P, Huang C, Czarnecki K. SA-Det3D: Self-attention based context-aware 3D object detection[C]. Montreal: International Conference on Computer Vision, 2021:3022-3031.
|
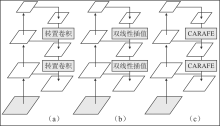
| [13] |
Wang J, Chen K, Xu R, et al. Carafe:Content-aware reas-sembly of features[C]. Seoul: International Conference on Computer Vision, 2019:3007-3016.
|
| [14] |
缪冉, 李菲菲, 陈虬. 基于卷积神经网络与多尺度空间编码的场景识别方法[J]. 电子科技, 2020, 33(12):54-58,74.
|
|
Miao Ran, Li Feifei, Chen Qiu. Scene recognition algorithm based on convolutional neural networks and multi-scale space Encoding[J]. Electronic Science and Technology, 2020, 33(12):54-58,74.
|
| [15] |
Tan Y S, Lim K M, Tee C, et al. Convolutional neural network with spatial pyramid pooling for hand gesture recognition[J]. Neural Computing and Applications, 2021, 33(10):5339-5351.
doi: 10.1007/s00521-020-05337-0
|
| [16] |
Girshick R. Fast R-CNN[C]. Santiago: International Con-ference on Computer Vision, 2015:1440-1448.
|
| [17] |
Lin T Y, Goyal P, Girshick R, et al. Focal loss for dense object detection[C]. Venice: International Conference on Computer Vision, 2017:2980-2988.
|
| [18] |
Geiger A, Lenz P, Stiller C, et al. Vision meets robotics:The KITTI dataset[J]. The International Journal of Robotics Research, 2013, 32(11):1231-1237.
doi: 10.1177/0278364913491297
|
| [19] |
Kingma D P, Ba J. Adam:A method for stochastic optimization[J]. International Conference for Learning Representations, 2014, 21(12):6980-6995.
|
| [20] |
陆慧敏, 杨朔. 基于深度神经网络的自动驾驶场景三维目标检测算法[J]. 北京工业大学学报, 2022, 49(6):1-9.
|
|
Lu Huimin, Yang Shuo. Three-dimensional object dete-ction algorithm based on deep neural networks for automatic driving[J]. Journal of Beijing University of Technology, 2022, 49(6):1-9.
|