Electronic Science and Technology ›› 2023, Vol. 36 ›› Issue (12): 16-24.doi: 10.16180/j.cnki.issn1007-7820.2023.12.003
Previous Articles Next Articles
SUO Fangfei1,JI Yunfeng2
Received:2022-06-29
Online:2023-12-15
Published:2023-12-05
Supported by:CLC Number:
SUO Fangfei,JI Yunfeng. Review of the Research on the Core Algorithm of Table Tennis Robot[J].Electronic Science and Technology, 2023, 36(12): 16-24.

Figure 1.
Table tennis robot hitting process"
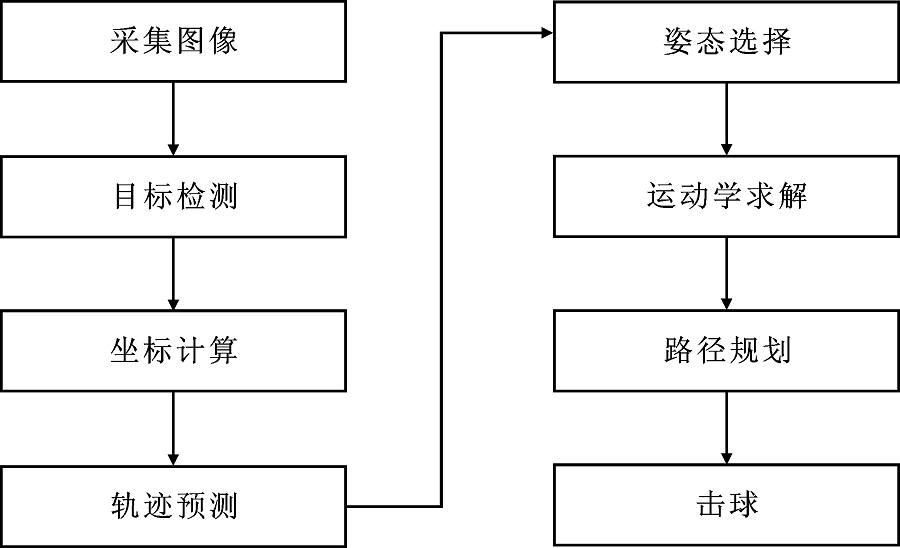
Table 1.
Comparison of two rotational measurement methods"
| 研究 | 方法 | 帧率/ frame·s-1 | 估计精度 |
|---|---|---|---|
| 文献[ | 基于球表面标记 直接测量 | 200 | 误差小于 1.28 rad·s-1 |
| 文献[ | 通过飞行轨迹 反向推导 | 200 | 在x方向误差小 于5.36 rad·s-1, 在y方向误差小 于2.97 rad·s-1 |
Table 2.
Trajectory prediction summary based on deep learning methods"
| 研究 | 方法 | 性能评价 |
|---|---|---|
| 文献[ | 使用K-means算法将轨迹 进行分类 | 对于旋转来球回球成功率达 到71.2% |
| 文献[ | 通过反向传播(BPN)进行 球的轨迹预测 | 非旋转球的轨迹预测偏差约为 37 mm,预测成功率达到88% |
| 文献[ | 提出DCNN-LSTM模型 | 在仿真实验中对旋转球的轨 迹预测成功率达到90% |
Table 3.
Summary of returning the ball to the desired landing point based on traditional methods"
| 研究 | 方法 | 性能评价 |
|---|---|---|
| 文献[ | 将空气动力学模型简化为 线性模型 | 求解速度30 ms,落点 误差小 |
| 文献[ | 将决策目标从某一点简化 为某一块区域 | 求解速度1 ms,落点 误差较大 |
| 文献[ | 对击球平面上每种状态进 行求解,并将结果以表格 形式保存 | 求解速度μs级,对固定 点的落点误差小 |
Table 4.
Summary of the return strategy method based on learning algorithm"
| 作者 | 学会定点回 球的效率 | 方法 | 性能评价 |
|---|---|---|---|
| 文献[ | 超过20 000 回合 | 基于蒙特卡洛的 强化学习算法(仿 真环境下) | 误差小于0.05 m, 成功率99.22% |
| 文献[ | 7 000条轨 迹数据 | 通过人类演示训 练动力学模型、虚 拟现实环境 | 误差小于0.2 m, 成功率86.7% |
| 文献[ | 200个回合 以内 | 改进的DDPG算法 | 误差小于0.2 m, 成功率98% |
| 文献[ | 超过70万 个回合 | 改进的DDPG算法 (仿真环境下) | 误差小于0.05 m, 成功率100% |
| 文献[ | 50 000回合 (回击旋转球) | 改进的DDPG算法、 LSTM网络 | 旋转球回球成功 率高于70% |
| [1] | Lewis F L, Ge S S. Autonomous mobile robots:Sensing,control,decision making and application[M]. Boca Raton: CRC Press, 2018:1-2. |
| [2] | 章逸丰. 快速飞行物体的状态估计和轨迹预测[D]. 杭州: 浙江大学, 2015:1-7. |
| Zhang Yifeng. State estimation and trajectory prediction of fast flying object[D]. Hangzhou: Zhejiang University, 2015:1-7. | |
| [3] | Liu C F. On a modified method of measuring the rotational speed of a table tennis ball[C]. Taipei: Proceedings of SICE Annual Conference, 2010:1567-1572. |
| [4] | 季云峰, 陆爱发, 任杰, 等. 基于乒乓球机器人视觉系统的单色乒乓球旋转三维速度测定[J]. 上海体育学院学报, 2017, 41(3):83-88. |
| Ji Yunfeng, Lu Aifa, Ren Jie, et al. 3D velocity measurement of single-color table tennis rotation based on visual system of table tennis robot[J]. Journal of Shanghai University of Sport, 2017, 41(3):83-88. | |
| [5] | 季云峰, 施之皓, 任杰, 等. 基于单目视觉伺服系统的高速旋转球体三维速度测定[J]. 中国体育科技, 2017, 53(2):139-145. |
| Ji Yunfeng, Shi Zhihao, Ren Jie, et al. 3D velocity meas-urement of high-speed rotating sphere based on the monocular vision servo system[J]. China Sport Scienceand Technology, 2017, 53(2):139-145. | |
| [6] | Nonomura J, Nakashima A, Hayakawa Y. Analysis of effects of rebounds and aerodynamics for trajectory of table tennis ball[C]. Taipei: Proceedings of SICE Annual Conference, 2010:1567-1572. |
| [7] | Tamaki T, Wang H, Raytchev B, et al. Estimating the spin of a table tennis ball using inverse compositional image alignment[C]. Kyoto: IEEE International Conference on Acoustics,Speech and Signal Processing, 2012:1457-1460. |
| [8] | 张传伟, 王京梅, 林晓明, 等. 基于背景差分的一种运动目标检测方法[J]. 电子科技, 2015, 28(10):69-71. |
| Zhang Chuanwei, Wang Jingmei, Lin Xiaoming, et al. A moving objects detection method based on background subtraction[J]. Electronic Science and Technology, 2015, 28(10):69-71. | |
| [9] | 官洪运, 苏振涛, 汪晨. 基于特征融合的背景差分改进算法[J]. 电子科技, 2020, 33(12):22-27. |
| Guan Hongyun, Su Zhentao, Wang Chen. Improved bac-kground subtraction based on feature fusion[J]. Electronic Science and Technology, 2020, 33(12):22-27. | |
| [10] | Chen X, Huang Q, Zhang W, et al. Ping-pong trajectory perception and prediction by a PC based high speed four-camera vision system[C]. Taipei: The Ninth World Congress on Intelligent Control and Automation, 2011:1087-1092. |
| [11] |
Su H, Fang Z, Xu D, et al. Trajectory prediction of spin-ning ball based on fuzzy filtering and local modeling for robotic ping-pong player[J]. IEEE Transactions on Instrumentation and Measurement, 2013, 62(11):2890-2900.
doi: 10.1109/TIM.2013.2263672 |
| [12] | Huang Y, Xu D, Tan M, et al. Trajectory prediction of s-pinning ball for ping-pong player robot[C]. San Franc-isco: IEEE/RSJ International Conference on Intelligent Robots and Systems, 2011:3434-3439. |
| [13] |
Zhao Y, Zhang Y, Xiong R, et al. Optimal state estimation of spinning ping-pong ball using continuous motion model[J]. IEEE Transactions on Instrumentation and Measurement, 2015, 64(8):2208-2216.
doi: 10.1109/TIM.2014.2386951 |
| [14] | 季云峰. 基于遗传算法的乒乓球轨迹反向推导旋转方法研究[J]. 南京体育学院学报, 2021, 20(2):53-60. |
| Ji Yunfeng. Reverse calculation of rotation using trajectory of table tennis based on genetic algorithm[J]. Journal of Nanjing Sports Institute, 2021, 20(2):53-60. | |
| [15] | 李伟健. 基于深度学习的乒乓球目标检测与旋转球轨迹预测[D]. 上海: 东华大学, 2021:22-48. |
| Li Weijian. Table tennis target detection and rotating ball trajectory prediction based on deep learning[D]. Shanghai: Donghua University, 2021:22-48. | |
| [16] |
Zhang Z, Xu D, Tan M. Visual measurement and prediction of ball trajectory for table tennis robot[J]. IEEE Transactions on Instrumentation and Measurement, 2010, 59(12):3195-3205.
doi: 10.1109/TIM.2010.2047128 |
| [17] | Zhang Y, Wei W, Yu D, et al. A tracking and predicting scheme for ping pong robot[J]. Journal of Zhejiang University, 2011, 12(2):110-115. |
| [18] |
Mülling K, Kober J, Peters J. A biomimetic approach torobot table tennis[J]. Adaptive Behavior, 2011, 19(5):359-376.
doi: 10.1177/1059712311419378 |
| [19] | 胡啸川, 李泽森, 杨双, 等. 三目组合视觉系统在乒乓球机器人上的研究与实现[J]. 机器人技术与应用, 2020, 26(5):39-43. |
| Hu Xiaochuan, Li Zesen, Yang Shuang, et al. Research and implementation of trinocular combined vision system on table tennis robot[J]. Robot Technique and Application, 2020, 26(5):39-43. | |
| [20] | 季云峰, 任杰, 施之皓. 乒乓球机器人视觉系统的实时跟踪[J]. 上海体育学院学报, 2020, 44(6):70-75. |
| Ji Yunfeng, Ren Jie, Shi Zhihao. Real-time tracking of table tennis robot’s vision system[J]. Journal of Shanghai University of Sport, 2020, 44(6):70-75. | |
| [21] | 张远辉. 基于实时视觉的乒乓球机器人标定和轨迹跟踪技术研究[D]. 杭州: 浙江大学, 2009:81-112. |
| Zhang Yuanhui. Study on real-time vision based calib-ration and trajectory tracking technology of ping pong robot[D]. Hangzhou: Zhejiang University, 2009:81-112. | |
| [22] | Zhang Z, Xu D, Yang P. Rebound model of table tennisball for trajectory prediction[C]. Tianjin:IEEE International Conference on Robotics and Biomimetics, 2010:376-380. |
| [23] | Nakashima A, Kobayashi Y, Ogawa Y, et al. Modeling of rebound phenomenon between ball and racket rubber with spinning effect[C]. Fukuoka:ICCAS-SICE, 2009:2295-2300. |
| [24] | Chen X, Tian Y, Huang Q, et al. Dynamic model based ball trajectory prediction for a robot ping-pong player[C]. Tianjin:IEEE International Conference on Roboticsand Biomimetics, 2010:603-608. |
| [25] | 任艳青, 徐德, 谭民. 旋转球与乒乓球台/球拍的反弹模型[J]. 控制理论与应用, 2012, 29(11):1433-1439. |
| Ren Yanqing, Xu De, Tan Min. Rebound model between spinning table tennis ball and table/racket[J]. Control Theory & Application, 2012, 29(11):1433-1439. | |
| [26] | 赵永生. 旋转飞行乒乓球的状态估计和轨迹预测[D]. 杭州: 浙江大学, 2017:29-56. |
| Zhao Yongsheng. State estimation and trajectory prediction of spinning-flying ping-pong ball[D]. Hangzhou: Zhejiang University, 2017:29-56. | |
| [27] | 曾鉴彬. 七自由度乒乓球机器人系统的研究与设计[D]. 上海: 东华大学, 2020:15-29. |
| Zeng Jianbin. Research and design of table tennis robot system with seven degrees of freedom[D]. Shanghai: Donghua University, 2020:15-29. | |
| [28] | Zhao Y, Xiong R, Zhang Y. Model based motion state estimation and trajectory prediction of spinning ball for ping-pong robots using expectation-maximization algorithm[J]. Journal of Intelligent & Robotic Systems, 2017, 87(3):407-423. |
| [29] | Lin H I, Huang Y C. Ball trajectory tracking and prediction for a ping-pong robot[C]. Hulun Buir: The Ninth International Conference on Information Science and Technology, 2019:222-227. |
| [30] | Qiao F F. Application of deep learning in automatic detection of technical and tactical indicators of table tennis[J]. Plos One, 2021, 16(3):5259-5266. |
| [31] | Gao Y P, Tebbe J, Krismer J, et al. Markerless racket pose detection and stroke classification based on stereo vision for table tennis robots[C]. Naples: The Third IEEE International Conference on Robotic Computing, 2019:189-196. |
| [32] | 谈小峰. 人体检测和姿态识别在乒乓球机器人上的应用研究[D]. 上海: 东华大学, 2021:17-72. |
| Tan Xiaofeng. Research on application of human body detection and pose recognition in table tennis robot system[D]. Shanghai: Donghua University, 2021:17-72. | |
| [33] | Huang Y L, Schölkopf B, Peters J. Learning optimal striking points for a ping-pong playing robot[C]. Hamburg: IEEE/RSJ International Conference on Intelligent Robots and Systems, 2015:4587-4592. |
| [34] | Huang Y L, Büchler D, Koc O, et al. Jointly learning trajectory generation and hitting point prediction in robot table tennis[C]. Cancun: IEEE-RAS the Sixteenth International Conference on Humanoid Robots, 2016:650-655. |
| [35] | Ji Y F, Hu X Y, Chen Y T, et al. Model-based trajectoryprediction and hitting velocity control for a new table tennis robot[C]. Prague: IEEE/RSJ International Conference on Intelligent Robots and Systems, 2021:2728-2734. |
| [36] | Liu C F, Hayakawa Y, Nakashima A. Racket control for robot playing table tennis ball[C]. Jeju Island: The Twelfth In-ternational Conference on Control,Automation and Systems, 2012:1427-1432. |
| [37] | Nakashima A, Nonomura J, Liu C F, et al. Hitting back- spin balls by robotic table tennis system based on physical models of ball motion[J]. IFAC Proceedings Volumes, 2012, 45(22):834-841. |
| [38] | Huang Q L, Wu J, Xiong R. A solution of inverse kinematics for 7-dof manipulaators and its application[C]. Beijing: The Tenth World Congress on IEEE, 2012:3711-3717. |
| [39] | 孙立书, 张翰康. 乒乓球机器人最优击球规划[J]. 江苏科技大学学报(自然科学版), 2019, 33(5):73-82 |
| Sun Lishu, Zhang Hankang. Table tennis robot optimal stroke planning[J]. Journal of Jiangsu University of Science and Technology(Natural Science Edition), 2019, 33(5):73-82 | |
| [40] | Zhu Y F, Zhao Y S, Jin L S, et al. Towards high level skill learning: Learn to return table tennis ball using monte-carlo based policy gradient method[C]. Kandima: IEEE International Conference on Real-time Computing and Robotics, 2018:34-41. |
| [41] | Mahjourian R, Miikkulainen R, Lazic N, et al. Hierarchical policy design for sample-efficient learning of robot table tennis through self-play[EB/OL].(2022-01-29) [2022-10-16] https://arxiv.org/abs/1811.12927. |
| [42] | Tebbe J, Krauch L, Gao Y P, et al. Sample-efficient reinforcement learning in robotic table tennis[C]. Xi'an: IEEE International Conference on Robotics and Automation, 2021:4171-4178. |
| [43] | 金礼森. 基于学习的乒乓球机器人回球决策[D]. 杭州: 浙江大学, 2019:15-31. |
| Jin Lisen. Learning to return table tennis ball for robots[D]. Hangzhou: Zhejiang University, 2019:15-31. | |
| [44] | Luo Y, Zhang H B, Zhu X Y, et al. Ball motion control in the table tennis robot system using time-series deep reinforcement learning[J]. IEEE Access, 2021(9):99816-99827. |
| [1] | Bin ,WANG Sen. Visual Detection of Structural Cracks Using Depth Deformable Contour ModelLAI [J]. Electronic Science and Technology, 2023, 36(9): 35-40. |
| [2] | SUN Hong,ZHAO Yingzhi. Lightweight Generative Adversarial Networks Based on Multi-Scale Gradient [J]. Electronic Science and Technology, 2023, 36(7): 32-38. |
| [3] | ZENG Xinxin,ZHANG Hongyan. A Farmland Parcel Extraction Network Based on Multi-Scale Semantic Information Enhancement [J]. Electronic Science and Technology, 2023, 36(7): 70-74. |
| [4] | LI Keran,CHEN Sheng,KE Panpan. A Method of Facial Mask Segmentation Based on CA-Net [J]. Electronic Science and Technology, 2023, 36(6): 64-71. |
| [5] | SHI Jianke,QIAO Meiying,LI Bingfeng,ZHAO Yan. Underwater Occlusion Target Detection Algorithm Based on Attention Mechanism [J]. Electronic Science and Technology, 2023, 36(5): 62-70. |
| [6] | LIU Yuwei,CAO Min,FENG Haojia. CNAS Recognition Criteria Automatic Benchmarking System Based on Natural Language Processing [J]. Electronic Science and Technology, 2023, 36(5): 28-33. |
| [7] | ZHENG Yuheng,FU Dongxiang. UAV Detection Based on Slim-YOLOv4 with Embedded Device [J]. Electronic Science and Technology, 2023, 36(5): 55-61. |
| [8] | CUI Zhuodong,CHEN Wei,YIN Zhong. Helmet Wearing Detection Based on Enhanced Feature Fusion Network [J]. Electronic Science and Technology, 2023, 36(4): 44-51. |
| [9] | TANG Zheng,ZHANG Huilin,MA Lixin,LIU Jinzhi,WANG Hao. Identification of Foreign Objects on Transmission Lines Using Lightweight Network Algorithm [J]. Electronic Science and Technology, 2023, 36(4): 71-77. |
| [10] | BAI Yingqi,PALIDAN·Tuerxun . A Scientific Literature Recommendation Method Based on Multi-Task Learning [J]. Electronic Science and Technology, 2023, 36(4): 59-64. |
| [11] | LÜ Chengxu,FAN Suozhong,JI Yunfeng,YOU Yiping. Summary of Research on Table Tennis Trajectory Prediction and Rotation Measurement [J]. Electronic Science and Technology, 2023, 36(4): 90-102. |
| [12] | LUO Ruipeng,FENG Mingke,HUANG Xin,ZOU Renling,LI Dan. A Review of Research on EEG Signal Preprocessing Methods [J]. Electronic Science and Technology, 2023, 36(4): 36-43. |
| [13] | LU Dongxiang. Research Progress of Node Assignment Optimization Strategy in Road Traffic Network [J]. Electronic Science and Technology, 2023, 36(3): 81-86. |
| [14] | YU Qiongfang,NIU Dongyang. Mixed Prediction of Mine Pressure Time and Space Based on LSTM Network [J]. Electronic Science and Technology, 2023, 36(2): 67-72. |
| [15] | ZUO Bin,LI Feifei. An Effective Segmentation Method for COVID-19 CT Image Based on Attention Mechanism and Inf-Net [J]. Electronic Science and Technology, 2023, 36(2): 22-28. |
|
||
